21 BAB 3
TAHAPAN STUDI
Dalam bab ini akan dijelaskan langkah-langkah proses pembuatan true orthophoto yang dimulai dari akusisi data serta pengolahan data. Untuk diperoleh data pembanding, dilakukan uji coba awal untuk membantu kelancaran proses pengolahan data dan pembuatan metode pembuatan true orthophoto yang akan diuraikan pada bab ini.
3.1. Tahapan Pembuatan True Orthophoto
Proses pembuatan true orthophoto dilakukan melalui beberapa tahap sesuai pada diagram pada Gambar 3.1. Tahap pertama yang dilakukan adalah melakukan akuisisi data. Pada tahap ini dilakukan pengambilan data, yaitu berupa data foto dijital dan data parameter kalibrasi kamera. Setelah data berhasil diakuisisi, tahap selanjutnya adalah melakukan pengolahan data. Pengolahan data tersebut dilakukan dalam beberapa tahap yang saling berkaitan satu sama lain. Pada tahap pengolahan data, hal yang pertama dilakuakn adalah melakukan rekonstruksi model 3D sehingga didapatkan koordinat titik-titik dari model yang dapat berupa DSM. Setelah koordinat model berhasil di ekstraksi, hal selanjutnya adalah melakukan proses rektifikasi diferensial. Proses rektifikasi tersebut menggunakan hubungan kesegarisan (collinearity), dan proses manipulasi piksel.
22 Secara keseluruhan diagram alir metode tersebut:
23 3.1.1 Akuisisi Data Penelitian
Langkah pertama yang dilakukan dalam proses rektifikasi adalah akusisi data. Data awal yang digunakan adalah beberapa foto tunggal dengan data kalibrasi kamera yang akan digunakan untuk proses rekonstruksi fotogrametri, yaitu menghitung parameter orientasi luar dan merekonstruksi model tiga dimensinya.
Data yang digunakan terdiri dari tiga objek. Foto seluruh objek dapat dilihat pada bagian Lampiran B. Objek uji coba pertama merupakan sebuah kotak kayu sederhana seperti yang terdapat pada Gambar 3.2. Data didapat dari tutorial perangkat lunak PhotoModeler Scanner. Objek pertama ini dijadikan uji coba sebagai langkah awal dalam menerapkan konsep prinsip kesegarisan dalam metode pembuatan true orthophoto dari fasad model.
Gambar 3.2 Contoh foto dijital kotak sederhana
Objek uji coba kedua adalah foto udara dari Kampus Institut Teknologi Bandung yang diambil menggunakan pesawat tanpa awak (UAV) EasyStar pada tanggal 30 Nopember 2012 sekitar pukul 9 pagi. Kamera yang digunakan untuk pengambilan data adalah kamera poket Canon Powershot S90 (lihat Gambar 3.3) dengan spesifikasi pada Tabel 3.1.
Tabel 3.1 Tabel spesifikasi kamera Canon Powershot S90
24 Gambar 3.3 Kamera Canon PowerShot S90 yang digunakan saat pengambilan data
(Joinson, 2010)
Dari foto udara yang telah berhasil dipotret, dipilih foto udara yang terpusat di daerah pusat Kampus ITB, yaitu daerah Campus Center dan Boulevard ITB seperti pada Gambar 3.4.
Gambar 3.4 Contoh foto udara Kampus ITB
Foto udara dipilih dalam objek studi untuk menguji metode pembuatan true orthophoto dengan objek yang lebih kompleks, karena nantinya konsep pembuatan true orthophoto pada fotogrametri aerial diterapkan pada fotogrametri terestrial.
Lalu objek ketiga adalah bangunan sederhana yang memiliki variansi kedalaman pada fasadnya. Objek yang digunakan adalah bangunan pos satpam di dekat gedung GKU Barat Kampus ITB seperti pada Gambar 3.5. Objek ini dipilih dengan harapan mampu merepresentasikan DSM objek yang lebih kompleks dan dibandingkan dengan objek pertama yang jauh lebih sederhana.
25 3.1.2. Rekonstruksi Model 3D
Model tiga dimensi dihasilkan melalui perataan berkas dari foto-foto yang telah ada dan dilakukan dalam perangkat lunak PhotoModeler Scanner. Dalam proses tersebut dilakukan referencing terhadap objek antar foto. Setelah proses tersebut berhasil dilakukan, maka semua kamera akan diketahui posisinya terhadap ruang (lihat Gambar 3.6).
Gambar 3.6 Posisi kamera terhadap ruang saat pemotretan objek
26 Gambar 3.7 Proses gridding pada fasad model menggunakan perangkat lunak
AutoCAD 3.1.3. Hubungan Kesegarisan
Dengan adanya koordinat 3D model, parameter orientasi luar, dan data kalibrasi, hal yang selanjutnya dilakukan adalah dengan melakukan penghitungan matematis dari persamaan kesegarisan (collinearity). Diterapkannya prinsip kesegarisan dimana posisi 3D dari suatu titik di model, koordinat titik di foto, dan titik utama kamera berada pada satu garis lurus, yang diilustrasikan pada Gambar 2.6. Dapat dilihat pada persamaan (2.1), bahwa hasil dari persamaan kesegarisan tersebut adalah didapatkannya koordinat titik pada foto dalam sistem koordinat sentral. Perlu dilakukan proses transformasi untuk mengubah sistem koordinat sentral ke sistem koordinat piksel untuk dapat dilakukannya proses ekstraksi derajat keabuan (gray value) yang terbagi dalam tiga gelombang warna (band RGB) dari setiap piksel di foto.
27 koordinat fotonya masing-masing yang didapat dari persamaan kesegarisan yang diilustrasikan pada Gambar 3.8.
Gambar 3.8 Ilustrasi pengisian kerangka proyeksi dengan nilai derajat keabuan dari piksel foto (Wolf & Dewitt, 2000)
Tetapi, proses pengisian piksel tidaklah sebatas mengidentifikasi dan memindahkan nilai piksel. Perlu dilakukannya proses pemilihan piksel dari foto mana yang akan diambil nilai derajat keabuannya, karena model dibentuk dari beberapa foto tunggal. Selain itu, proses rektifikasi ini diharapkan akan menghasilkan foto yang telah hilang efek pergeseran reliefnya, oleh karenanya diterapkan algoritma z-buffer untuk mengidentifikasi obscured area (lihat Gambar 2.13) dari setiap piksel.
Algoritma z-buffer adalah sebuah metode dalam menentukan tingkat visibilitas dari foto (Alshawabkeh et al., 2009). Visibilitas yang dimaksud adalah visibilitas dari piksel-piksel yang mengarah pada efek pergeseran relief dan tampak pada foto. Metode ini mengidentifikasi koordinat suatu titik dan nilai ketinggiannya dari setiap piksel.
Pada saat proses forward projection, ada kemungkinan terjadinya suatu kondisi dimana berkas sinar dari pusat proyeksi memotong titik yang berada pada DSM. Apabila berkas sinar memotong hanya satu titik, maka tahapan selanjutnya dapat langsung dilakukan, yaitu pengambilan nilai derajat keabuan untuk disusun pada projection frame. Apabila lebih dari satu titik (biasanya memotong relief yang memiliki ketinggian ekstrem) maka dilakukan pemilihan nilai derajat keabuan terlebih dahulu. Parameter yang digunakan adalah parameter posisi tiga dimensi dari
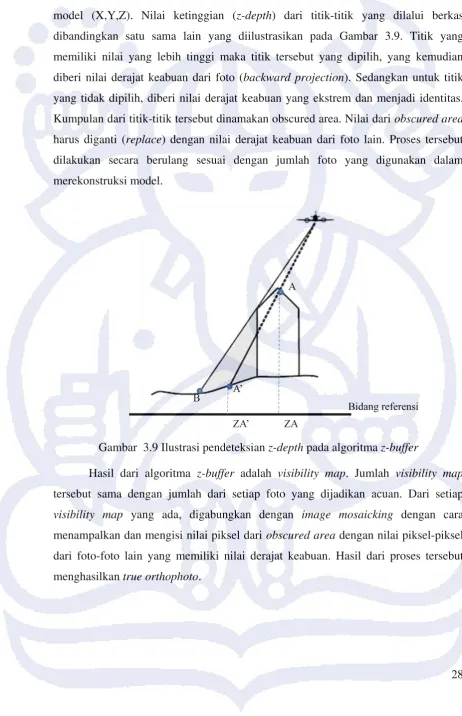
28 model (X,Y,Z). Nilai ketinggian (z-depth) dari titik-titik yang dilalui berkas dibandingkan satu sama lain yang diilustrasikan pada Gambar 3.9. Titik yang memiliki nilai yang lebih tinggi maka titik tersebut yang dipilih, yang kemudian diberi nilai derajat keabuan dari foto (backward projection). Sedangkan untuk titik yang tidak dipilih, diberi nilai derajat keabuan yang ekstrem dan menjadi identitas. Kumpulan dari titik-titik tersebut dinamakan obscured area. Nilai dari obscured area harus diganti (replace) dengan nilai derajat keabuan dari foto lain. Proses tersebut dilakukan secara berulang sesuai dengan jumlah foto yang digunakan dalam merekonstruksi model.
Gambar 3.9 Ilustrasi pendeteksian z-depth pada algoritma z-buffer