BAB III
PERANCANGAN ALAT DAN PROGRAM
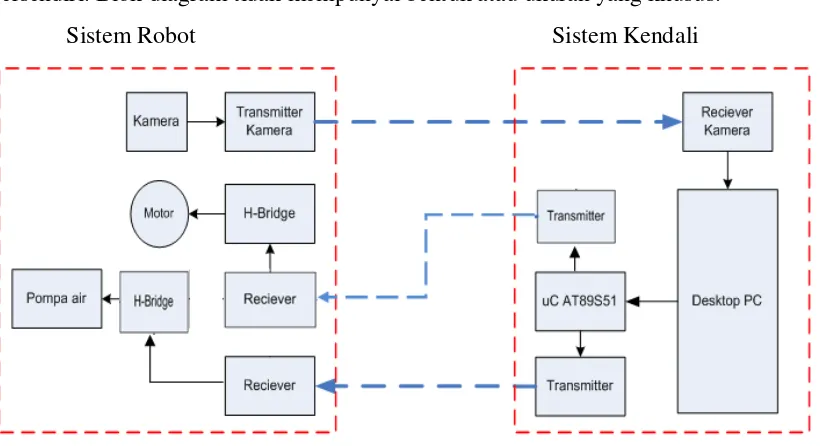
3.1. Blok Diagram Sistem
Blok diagram merupakan penyederhanaan dari rangkaian yang menyatakan hubungan berurutan dari satu atau lebih rangkaian yang memiliki kesatuan kerja tersendiri. Blok diagram tidak mempunyai bentuk atau ukuran yang khusus.
Sistem Robot Sistem Kendali
Gambar 3.1. Blok Diagram
Secara umum, prototipe robot pemadam api terkendali pada penelitian ini terdiri dari dua buah sistem yang terpisah yaitu sistem robot dan sistem kendali. Pada sistem robot terdiri dari sistem actuator dan sistem visual, sedangkan pada sistem kendali terdiri dari PC dan sistem kontrol robot.
Pada sistem kendali terdapat sebuah PC sebagai otak dari keseluruhan sistem. Pada PC inilah nantinya semua data akan diolah sebelum dikirimkan hasilnya ke robot. Agar dapat mengirimkan data secara jarak jauh pada sistem ini dilengkapi dengan transmitter. Mikrokontroller AT89S51 pada sistem kendali berfungsi sebagai alat interfacing antara sistem pemancar dengan PC. Metode interfacing yang digunakan pada sistem kendali digunakan metode paralel. Metode paralel sudah cukup baik untuk digunakan pada sistem interface ini. Data visual dari kamera akan diterima terlebih dahulu oleh receiver kamera sebelum hasilnya ditampilkan ke monitor PC, input data pengendalian robot dilakukan dengan cara mengklik command-command yang terdapat pada layout program dengan menggunakan mouse. Dengan demikian, dengan adanya kedua sistem di atas kita sudah bisa membuat sebuah robot yang dapat dimonitoring dan dikendalikan secara jarak jauh.
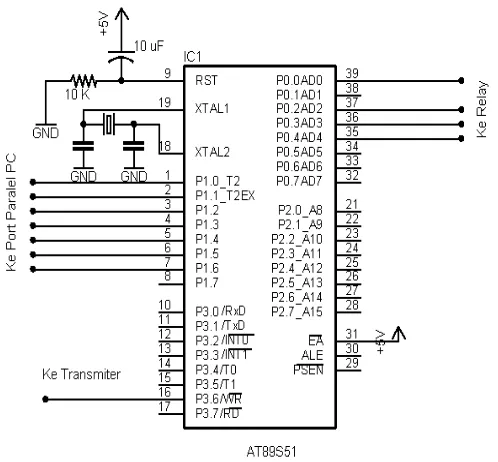
3.2. Rangkaian Mikrokontroler AT89S51
Rangkaian ini berfungsi untuk mengendalikan seluruh sistem. Komponen utama dari rangkaian ini adalah IC mikrokontroler AT89S51. Pada IC inilah semua program diisikan, sehingga rangkaian dapat berjalan sesuai dengan yang dikehendaki. Rangkaian mikrokontroler ditunjukkan pada gambar berikut ini:
Gambar 3.2 Rangkaian mikrokontroller AT89S51
port 3 Pin 40 dihubungkan ke sumber tegangan 5 volt. Dan pin 20 dihubungkan ke ground. Rangkaian mikrokontroler ini menggunakan komponen kristal 12 MHz sebagai sumber clocknya. Nilai kristal ini akan mempengaruhi kecepatan mikrokontroler dalam mengeksekusi suatu perintah tertentu.
Pada pin 9 dihubungkan dengan sebuah kapasitor 10 uF yang dihubungkan ke positif dan sebuah resistor 10 Kohm yang dihubungkan ke ground. Kedua komponen ini berfungsi agar program pada mikrokontroler dijalankan beberapa saat setelah power aktif. Lamanya waktu antara aktifnya power pada IC mikrokontroler dan aktifnya program adalah sebesar perkalian antara kapasitor dan resistor tersebut. Jika dihitung maka lama waktunya adalah :
10 10 1 det
tR x C Kx F m ik
Jadi 1 mili detik setelah power aktif pada IC kemudian program aktif.
Pada perancangan ini PORT 0 dihubungkan ke rangkaian relay, rangkaian relay ini dihubungkan dengan transmitter yang akan mengendalikan pergerakan motor roda robot. PORT 3.6 dihubungkan dengan transmitter yang akan mengendalikan pompa air. PORT 1 dihubungkan dengan port parallel pada komputer.
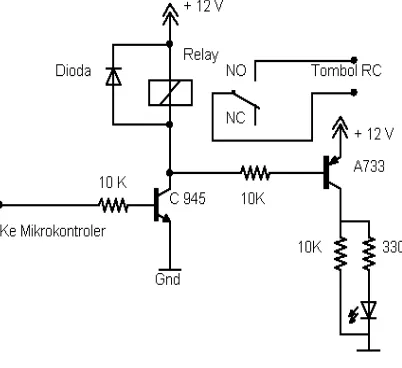
3.3. Rangkaian Relay
Relay ini berfungsi sebagai saklar elektronik yang fungsinya untuk menekan/melepaskan tekanan pada tombol transmitter. Transmitter yang digunakan adalah transmitter radio remote control. Rangkaian relay tampak seperti gambar di bawah ini ,
Relay merupakan salah satu komponen elektronik yang terdiri dari lempengan logam sebagai saklar dan kumparan yang berfungsi untuk menghasilkan medan magnet. Pada rangkaian ini digunakan relay 12 volt, ini berarti jika positif relay (kaki 1) dihubungkan ke sumber tegangan 12 volt dan negatif relay (kaki 2) dihubungkan ke ground, maka kumparan akan menghasilkan medan magnet, dimana medan magnet ini akan menarik lempengan yang mengakibatkan saklar (kaki 3) terhubung ke kaki 4. Dengan demikian, kita dapat mengunakan kaki 3 dan kaki 4 pada relay sebagai saklar untuk menghubungkan tombol pada radio remote control.
Pada rangkaian ini untuk mengaktifkan atau menon-aktifkan relay digunakan transistor tipe NPN. Dari gambar dapat dilihat bahwa negatif relay dihubungkan ke kolektor dari transistor NPN (2SC945), ini berarti jika transistor dalam keadaan aktif maka kolektor akan terhubung ke emitor dimana emitor langsung terhubung ke ground yang menyebabkan tegangan di kolektor menjadi 0 volt, keadaan ini akan mengakibatkan relay aktif. Sebaliknya jika transistor tidak aktif, maka kolektor tidak terhubung ke emitor, sehingga tegangan pada kolektor menjadi 12 volt, keadaan ini menyebabkan tidak aktif.
Kumparan pada relay akan menghasilkan tegangan singkat yang besar ketika relay dinon-aktifkan dan ini dapat merusak transistor yang ada pada rangkaian ini. Untuk mencegah kerusakan pada transistor tersebut sebuah dioda harus dihubungkan ke relay tersebut. Dioda dihubungkan secara terbalik sehingga secara normal dioda ini tidak menghantarkan. Penghantaran hanya terjadi ketika relay dinonaktifkan, pada saat ini arus akan terus mengalir melalui kumparan dan arus ini akan dialirkan ke dioda. Tanpa adanya dioda arus sesaat yang besar itu akan mengalir ke transistor, yang mengakibatkan kerusakan pada transistor.
Untuk menentukan tipe transistor yang digunakan, maka harus diketahui arus yang mengalir pada relay. Relay yang digunakan adalah JZC-4123, relay ini membutuhkan arus 34 mA untuk dapat bekerja, maka transistor yang digunakan harus dapat mengalirkan arus 34 mA pada kolektornya. Pada alat ini digunakan transistor tipe NPN C945, yang dapat mengalirkan arus maksimal 100 mA pada kolektornya.
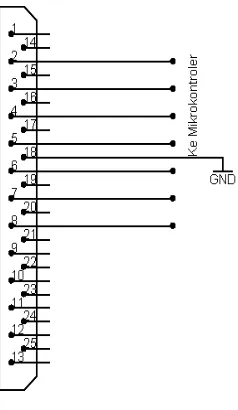
3.4. Perancangan Rangkaian Antar muka Paralel Port
Rangkaian antar muka paralel port dengan mikrokontroler ditunjukkan pada gambar berikut :
Gambar 3.4. Rangkaian Antar muka Paralel Port
Rangkaian ini menggunakan konektor DB 25 yang merupakan konektor untuk paralel port. Konektor DB 25 ini langsung dihubungkan dengan mikrokontroler AT89S51, yaitu pada port 1. Dengan demikian, maka komputer dapat berkomunikasi dengan mikrokontroler.
3.5. Kamera Wireless
Kamera yang digunakan pada robot adalah kamera CCTV (Closed Circuit Television) wireless. Gambar kamera cctv wireless ditunjukkan pada gambar dibawah ini
Kamera ini menggunakan sumber tegangan dari baterei 9 volt. Di dalam kamera terdapat sebuah sensor CMOS (Complementary Metal Oxide Semiconductor). CMOS adalah sebuah alat yang mengubah gambar optik ke sinyal-sinyal listrik menggunakan MOS (metal oxide semiconductor) transistor. Sumber informasi gambar yang telah diubah menjadi sinyal listrik akan dipancarkan dalam bentuk gelombang elektromagnetik melalui antena pada transmitter yang terdapat pada kamera yang akan ditangkap oleh antena penerima.
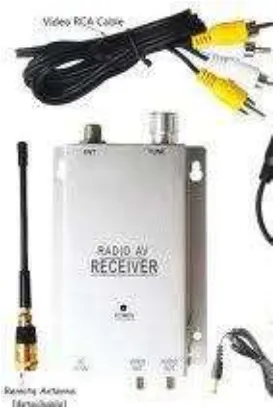
Gambar penerima kamera cctv wireless ditunjukkan pada gambar berikut:
Gambar 3.6 receiver kamera wireless
Alat penerima ini menggunakan catu daya dari adaptor 9 volt yang dihubungkan ke listrik PLN. Antena penerima yang terdapat pada receiver menangkap gelombang elektromagnetik yang dipancarkan oleh antena pemancar pada transmitter yang akan diubah menjadi sinyal listrik.
Gambar tv tuner ditunjukkan pada gambar berikut:
Gambar 3.7 TV Tuner
Tv tuner internal dipasang pada slot expansional card di CPU komputer, kemudian software tv tuner diinstalkan di dalam PC (Personal Computer). Hasil dari penginstalan yang sempurna akan memunculkan icon TVR Plus secrara otomatis pada desktop PC.
Input video card ini dihubungkan ke output dari penerima kamera cctv wireless, kemudian akan diproses oleh susunan komponen yang ada dalam perangkat video card yang kemudian diubah menjadi gambar yang akan ditampilkan pada monitor komputer. Dengan mengklik dua kali icon TVR Plus yang ada dilayar desktop maka aplikasi tv tuner tersebut akan terbuka dan tampilan yang ditangkap oleh kamera cctv wireless dapat ditampilkan di komputer.
3.6. Radio Frekuensi Transmiter dan Receiver
Radio frekuensi transmitter dan receiver yang digunakan adalah radio frekuensi transmitter dan receiver yang ada pada mobil-mobilan remot kontrol.
3.7. Perancangan Flow Chart ( Diagram Alir Program )
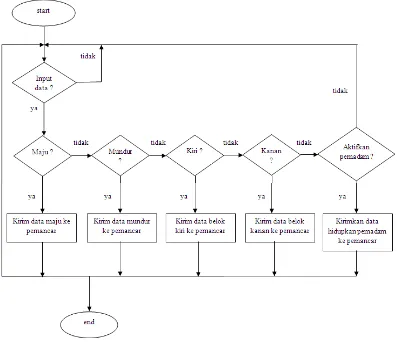
Flow chart adalah gambaran tentang proses – proses yang terjadi pada suatu program. Untuk merancang suatu program perlu dibuat flow chart terlebih dahulu. Dengan menggunakan flow chart dapat diketahui perintah – perintah atau instruksi – instruksi yang dilaksanakan pada program dan sub – sub program. Adapun diagram alir ( flowchart ) dari program pengendalian pada PC dan robot ditunjukkan pada gambar berikut :
Gambar 3.9 Flowchart pada robot
3.8. Perancangan Program.
Pada perancangan program ini, Program ditulis atau dibuat dengan menggunakan Visual Basic 6.0. Pada Visual Basic sebenarnya tidak ada batasan antara sub program dengan program utama. Karena dalam sistem pemrogramannya sub – sub program ini akan langsung dijalankan jika terjadi suatu aksi pada program misalnya penekanan tombol perintah atau pemilihan menu. Jadi pada program Visual Basic setelah sub – sub program dibuat, program utama tidak dibuat lagi karena pemanggilan sub – sub program tergantung pemakai itu sendiri.
Pada perancangan ini, sub – sub program yang harus dibuat adalah : 1. Sub program Command1_Click()
5. Sub program Command5_Click()
Adapun sub – sub program di atas akan dijelaskan sebagai berikut : 1. Sub program Command1_Click()
Sub program Command1_Click() adalah sebagai berikut: Private Sub Command1_Click()
PortOut (&H378), 1 End Sub
Perintah ini akan mengirimkan data 1 desimal ke port 378 heksa ( parallel port). Perintah ini akan memberikan data logika high pada D0, pada port 378 sebagai berikut:
D7 D6 D5 D4 D3 D2 D1 D0 378 0 0 0 0 0 0 0 1
Data ini akan dikenali oleh mikrokontroler sebagai perintah maju 2. Sub program Command2_Click()
Sub program Command2_Click() adalah sebagai berikut: Private Sub Command2_Click()
PortOut (&H378), 2 End Sub
Perintah ini akan mengirimkan data 2 desimal ke port 378 heksa ( parallel port). Perintah ini akan memberikan data logika high pada D1, pada port 378 sebagai berikut:
D7 D6 D5 D4 D3 D2 D1 D0 378 0 0 0 0 0 0 1 0
Sub program Command3_Click() adalah sebagai berikut: Private Sub Command3_Click()
PortOut (&H378), 8 End Sub
Perintah ini akan mengirimkan data 8 desimal ke port 378 heksa ( parallel port). Perintah ini akan memberikan data logika high pada D3, pada port 378 sebagai berikut:
D7 D6 D5 D4 D3 D2 D1 D0 378 0 0 0 0 1 0 0 0
Data ini akan dikenali oleh mikrokontroler sebagai perintah belok kiri. 4. Sub program Command4_Click()
Sub program Command4_Click() adalah sebagai berikut: Private Sub Command4_Click()
PortOut (&H378), 4 End Sub
Perintah ini akan mengirimkan data 4 desimal ke port 378 heksa ( parallel port). Perintah ini akan memberikan data logika high pada D2, pada port 378 sebagai berikut:
D7 D6 D5 D4 D3 D2 D1 D0 378 0 0 0 0 0 1 0 0
Data ini akan dikenali oleh mikrokontroler sebagai perintah mundur. 5. Sub program Command5_Click()
Sub program Command5_Click() adalah sebagai berikut: Private Sub Command5_Click()
PortOut (&H378), 16 End Sub
D7 D6 D5 D4 D3 D2 D1 D0 378 0 0 0 1 0 0 0 0
Data ini akan dikenali oleh mikrokontroler sebagai perintah berhenti. 6. Sub program Command6_Click()
Sub program Command6_Click() adalah sebagai berikut: Private Sub Command6_Click()
PortOut (&H378), 32 End Sub
Perintah ini akan mengirimkan data 32 desimal ke port 378 heksa ( parallel port). Perintah ini akan memberikan data logika high pada D5, pada port 378 sebagai berikut:
D7 D6 D5 D4 D3 D2 D1 D0 378 0 0 1 0 0 0 0 0
Data ini akan dikenali oleh mikrokontroler sebagai perintah menyemprotkan air.
7. Sub program Command7_Click()
Sub program Command7_Click() adalah sebagai berikut: Private Sub Command7_Click()
PortOut (&H378), 64 End Sub
Perintah ini akan mengirimkan data 64 desimal ke port 378 heksa ( parallel port). Perintah ini akan memberikan data logika high pada D6, pada port 378 sebagai berikut:
D7 D6 D5 D4 D3 D2 D1 D0 378 0 1 0 0 0 0 0 0
Data ini akan dikenali oleh mikrokontroler sebagai perintah mematikan semprotan air.
8. Sub program Form_Load()
Timer1.Enabled = False Text1.Text = ""
End Sub
Perintah ini akan menonaktifkan timer 1 dan mengosongkan isi pada text1. 9. Sub program Option1_Click()
Sub program Option1_Click() adalah sebagai berikut: Private Sub Option1_Click()
Sub program Option2_Click() adalah sebagai berikut: Private Sub Option2_Click() merupakan program yang akan dijalankan jika dipilih tombol.
11.Sub program Timer1_Timer()
End If
Sub program ini akan membandingkan 1 digit paling kanan dari penekanan tombol keyboard, kemudian mengirimkan nilai pada port parallel sesuai dengan tombol keyboard yang ditekan.
Jika ditekan “W” atau “w” maka program akan mengirimkan data 1
desimal ke port 378 heksa ( parallel port). Perintah ini akan memberikan data logika high pada D0, pada port 378 sebagai berikut:
D7 D6 D5 D4 D3 D2 D1 D0 378 0 0 0 0 0 0 0 1
Data ini akan dikenali oleh mikrokontroler sebagai perintah maju sama dengan ketika tombol maju ditekan.
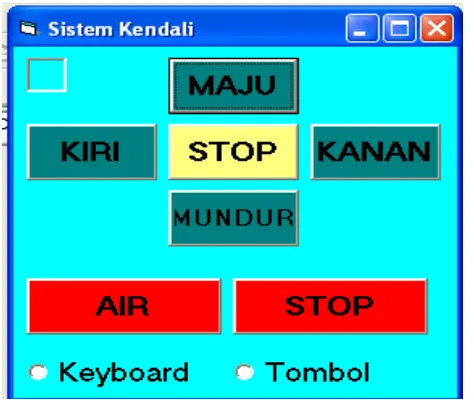
3.8.1. Perancangan Layout Program
Layout program ini dirancang dengan menggunakan project1. Layout program ditunjukkan pada gambar berikut:
BAB IV
PENGUJIAN ALAT DAN ANALISA PROGRAM
4.1 Pengujian software
Adapun tujuan pengujian software adalah untuk mengetahui bahwa program serta perangkat yang berhubungan dengan PC telah dapat menjalankan fungsinya dengan baik. Dalam pengujian ini diperlukan peralatan – peralatan sebagai berikut:
1. Komputer PC dengan spesifikasi pentium 4 2. Sistem operasi Windows XP
3. Program Visual Basic versi 6.0
4. Hardware (meliputi rangkaian keseluruhan)
Pengujian awal dilakukan dengan menghubungkan rangkaian ke PC, dimana DB 25 male dari rangkaian dihubungkan ke DB 25 female yang ada di komputer, selanjutnya membuat program dengan menggunakan bahasa pemrograman visual basic 6.0 untuk mengendalikan port parallel.
Pengujian Paralel Port
Untuk mengendalikan port parallel dengan menggunakan bahas pemrograman visual basic diperlukan sebuah dll. Pada perancangan ini digunakan io.dll. io.dll ini dimasukkan ke sistem32 pada windows selanjutnya mendeklarasikan penggunaan io.dll pada listing program.
Deklarasi io.dll pada bahasa pemrograman visual basic adalah sebagai berikut:
Private Declare Sub PortOut Lib "IO.DLL" (ByVal Port As Integer, ByVal Data As Byte)
Langkah selanjutnya adalah mengendalikan port parallel, dimana port parallel berada pada alamat port [378]. Programnya sebagai berikut:
PortOut &H378, &H1
Perintah ini akan memberikan data logika high pada D0 dan logika low pada D1 s/d D7, pada port 378 sebagai berikut:
D7 D6 D5 D4 D3 D2 D1 D0
378 0 0 0 0 0 0 0 1
Dari hasil pengujian didapatkan tegangan sebagai berikut:
Pin9 Pin8 Pin7 Pin6 Pin5 Pin4 Pin3 Pin2
D7 D6 D5 D4 D3 D2 D1 D0
378 0,22 0,22 0,22 0,22 0,22 0,22 0,22 2,97
Pengujian kedua dilakukan dengan memberikan data yang berbeda pada port parallel. Programnya sebagai berikut:
PortOut &H378, &H2
Perintah ini akan memberikan data logika high pada D1 dan logika low pada D0 s/d D7, kecuali D1 pada port 378 sebagai berikut:
Pin9 Pin8 Pin7 Pin6 Pin5 Pin4 Pin3 Pin2
D7 D6 D5 D4 D3 D2 D1 D0
378 0 0 0 0 0 0 1 0
Dari hasil pengujian didapatkan tegangan sebagai berikut:
Pin9 Pin8 Pin7 Pin6 Pin5 Pin4 Pin3 Pin2
D7 D6 D5 D4 D3 D2 D1 D0
378 0,22 0,22 0,22 0,22 0,22 0,22 2,96 0,22
Pengujian ketiga.
Programnya sebagai berikut: PortOut &H378, &H4
Pin9 Pin8 Pin7 Pin6 Pin5 Pin4 Pin3 Pin2
D7 D6 D5 D4 D3 D2 D1 D0
378 0 0 0 0 0 1 0 0
Dari hasil pengujian didapatkan tegangan sebagai berikut:
Pin9 Pin8 Pin7 Pin6 Pin5 Pin4 Pin3 Pin2
D7 D6 D5 D4 D3 D2 D1 D0
378 0,22 0,22 0,22 0,22 0,22 2,96 0,22 0,22
Pengujian keempat.
Programnya sebagai berikut: PortOut &H378, &H8
Perintah ini akan memberikan data logika high pada D3 dan logika low pada D0 s/d D7, kecuali D3 pada port 378 sebagai berikut:
Pin9 Pin8 Pin7 Pin6 Pin5 Pin4 Pin3 Pin2
D7 D6 D5 D4 D3 D2 D1 D0
378 0 0 0 0 1 0 0 0
Dari hasil pengujian didapatkan tegangan sebagai berikut:
Pin9 Pin8 Pin7 Pin6 Pin5 Pin4 Pin3 Pin2
D7 D6 D5 D4 D3 D2 D1 D0
378 0,22 0,22 0,22 0,22 2,96 0,22 0,22 0,22
4.2. Pengujian Rangkaian minimum mikrokontroller AT89S51
Loop:
Program di atas bertujuan untuk menghidupkan LED yang terhubung ke P3.7 selama ± 0,13 detik kemudian mematikannya selama ± 0,13 detik secara terus menerus. Perintah Setb P3.7 akan menjadikan P3.7 berlogika high yang menyebabkan LED mati. Acall tunda akan menyebabkan LED ini mati selama beberapa saat. Perintah Clr P3.7 akan menjadikan P3.7 berlogika low yang menyebabkan LED akan nyala. Perintah Acall tunda akan menyebabkan LED ini nyala selama beberapa saat. Perintah Sjmp Loop akan menjadikan program tersebut berulang, sehingga akan tampak LED tersebut tampak berkedip.
Lamanya waktu tunda dapat dihitung dengan perhitungan sebagai berikut : Kristal yang digunakan adalah kristal 11.0592 MHz, sehingga 1 siklus mesin
Mnemonic Siklus Waktu Eksekusi
MOV Rn,#data 2 2 x 1,085 μd = 2,17 μd
DJNZ 2 2 x 1,085 μd = 2,17 μd
Tunda:
μdetik atau 0,142.214205 detik dan dapat dibulatkan menjadi 0,14 detik.
Jika program tersebut diisikan ke mikrokontroller, kemudian mikrokontroller dapat berjalan sesuai dengan program yang diisikan, maka rangkaian minimum mikrokontroller telah bekerja dengan baik.
4.3. Pengujian Rangkaian Relay
Pengujian rangkaian relay pengendali penekanan pada tombol remote RC dapat dilakukan dengan memberikan tegangan 5 volt dan 0 volt pada basis transistor C945. Transistor C945 merupakan transistor jenis NPN, transistor jenis ini akan aktif jika pada basis diberi tegangan > 0,7 volt dan tidak aktif jika pada basis diberi tegangan < 0,7 volt. Aktifnya transistor akan mengaktifkan relay. Pada alat ini relay digunakan untuk menekan tombol pada remote radio kontrol, dimana hubungan yang digunakan adalah normally open (NO), dengan demikian jika relay tidak aktif maka penekanan pada remote terlepas, sebaliknya jika relay aktif, maka penekanan pada remote aktif. Pengujian dilakukan dengan memberikan tegangan 5 volt pada basis transistor, jika relay aktif dan remote tertekan, robot merespone maka rangkaian ini telah berfungsi dengan baik.
Program yang harus diisikan untuk mengaktifkan transistor yang akan mengaktifkan relay, sehingga tombol tertekan adalah sebagai berikut,
Setb P0.0
Dan untuk melepaskan tekanan pada tombol RC pogram yang harus diisikan adalah, Clr P0.0
Dengan demikian kita sudah dapat mengendalikan Robot dengan melalui program.
Pengujian software keseluruhan
Tampilan software secara keseluruhan ketika dijalankan adalah sebagai berikut:
Masing–masing command buttom di atas ketika diklick akan mengirimkan perintah ke mikro selanjutnya akan direspon oleh robot. Dari hasil pengujian didapatkan data sebagai berikut :
No. Tindakan Respone Robot
1 Tombol Maju Di-Click Robot Maju
3 Tombol Mundur Di-Click Robot Mundur
4 Tombol Kiri Di-Click Robot Belok Ke Arah Kiri
5 Tombol Stop Di-Click Robot Berhenti
6 Tombol Air Di-Click Robot Menyemprotkan air
7 Tombol Stop (air) Di-Click Robot berhenti menyemprotkan air
8 Tombol keyboard “W” atau “w” ditekan Robot Maju
9 Tombol keyboard “D” atau “d” ditekan Robot Belok Ke Arah Kanan
10 Tombol keyboard “Z” atau “z” ditekan Robot Mundur
11 Tombol keyboard “A” atau “a” ditekan Robot Belok Ke Arah Kiri
12 Tombol keyboard “S” atau “s” ditekan Robot Berhenti
13 Tombol keyboard “O” atau “o” ditekan Robot Menyemprotkan air
14 Tombol keyboard “I” atau “i” ditekan Robot berhenti menyemprotkan air
BAB V
KESIMPULAN DAN SARAN
5.1. Kesimpulan
1. Telah berhasil dirancang sebuah robot sederhana pemadam api terkendali yang dilengkapi dengan kamera cctv wireless, gambar yang diterima oleh kamera akan dikirim ke receiver kamera yang akan diinputkan ke input video card untuk ditampikan di monitor pada PC.
2. Komunikasi antara mikrokontroler dan komputer dapat menggunakan komunikasi parallel.
5.2. Saran
1. Diharapkan program ini dapat dikembangkan lagi, sehingga dapat menambah fungsi dari robot.