isprsarchives XL 7 W4 17 2015
Teks penuh
Gambar



Dokumen terkait
Initial development was tailored to high resolution RapidEye images, and all crucial and most challenging parts of the planned full processing chain were developed: module
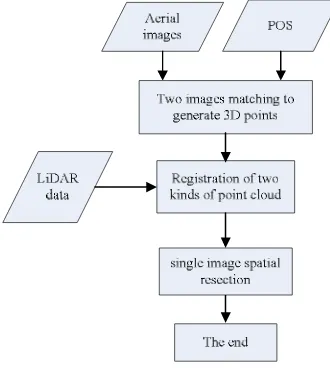
Recently, interests in 3D indoor modeling and positioning have been growing. Data fusion by using different sensors data is one of the 3D model producing methods. For a data
The experiments confirmed that line and catenary modeling based on the point cloud created by dense image matching is feasible, though, certain conditions need to be met. The
Given an initial approximation for the camera position and orientation, or camera pose, ViSP automatically establishes and continuously tracks corresponding features between an
KEY WORDS: Unmanned Aerial Vehicle (UAV), geomatics, corridor mapping, Terrestrial Mobile Mapping (TMM), integrated sensor orientation (ISO), Galileo E5 AltBOC,
Figure 3 shows the one-sigma accuracy estimates for the control points used to compare the LiDAR data to the point cloud generated by the UAV
But compared with the main rotor, its small size (1/7 of the diameter of the main rotor) and high rotation speed (5.5 times the main rotor speed) lead to less interference,
Legal framework for cadastral field provides tenure security, cadastral survey and land registration (all settlement areas, some agriculture areas), multi-purpose cadastre
