isprs archives XLI B1 1113 2016
Teks penuh
Gambar



Garis besar
Dokumen terkait
This can either happen by readjusting the final point cloud using control points (3D translations) or by directly correcting the trajectory by adding external
The Random Trees implementation available in eCognition was used to create 1000 trees for classifying high segments into buildings and trees and 1000 trees for
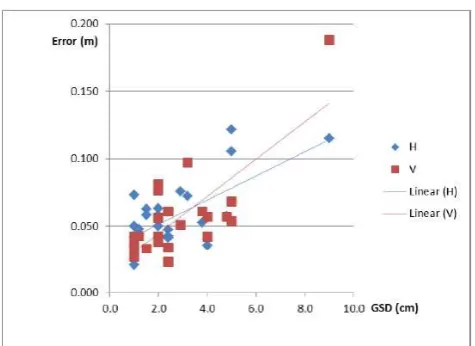
In this study, position uncertainty is computed theoretically without GCPs, and examined every orientation parameters effect on position accuracy with the
the LC or LU area sizes from official areal statistics (based on cadastral data). To summarise, the goal of the project Cop4Stat_2015plus is to extract information on landscape
The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Volume XLI-B1, 2016 XXIII ISPRS Congress, 12–19 July 2016, Prague, Czech
Different from the geometric rectification of airborne planar array images or multi linear array images, exterior orientation elements need to be determined for each
In the literature that I have seen(HE Min, 2011a)(Miao Hongjie, 2005), in the digital camera calibration, which generally is based on outdoor standardization field or
quantum efficiency, dynamic range and signal to noise to a level where the image quality generated by CMOS sensors got comparable to the image quality of CCDs or even got
