ESTIMASI PARAMETER UNTUK DATA WAKTU HIDUP YANG
BERDISTRIBUSI GAMMA PADA DATA TERSENSOR TIPE I
DENGAN METODE MAXIMUM LIKELIHOOD
SKRIPSI
JOHANNES HASIBUAN
NIM:090823029
DEPARTEMEN MATEMATIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM
UNIVERSITAS SUMATERA UTARA
PERSETUJUAN
Judul : ESTIMASI PARAMETER UNTUK DATA WAKTU HIDUP YANG BERDISTRIBUSI GAMMA PADA DATA TERSENSOR TIPE I DENGAN METODE MAXIMUM LIKELIHOOD
Kategori : SKRIPSI
Nama : JOHANNES HASIBUAN Program studi : SI MATEMATIKA Departemen : MATEMATIKA
Fakultas : MATEMATIKA DAN ILMU PENGETAHUAAN ALAM UNIVERSITAS SUMATERA UTARA
Disetujui di Medan, juni 2011 Komisi pembimbing :
Pembimbing II Pembimbin I
Prof. Dr. Tulus, M.Si Drs. Marwan Harahap, M.Eng NIP. 19620901 198803 1 002 . NIP. 10461225 197403 1 001
Diketahui/ disetujui oleh
Departemen Matematika FMIPA USU
Prof. Dr. Tulus, M.Si
PERNYATAAN
ESTIMASI PARAMETER UNTUK DATA WAKTU HIDUP YANG BERDISTRIBUSI GAMMA PADA DATA TERSENSOR TIPE I DENGAN
METODE MAXIMUM LIKELIHOOD
SKRIPSI
Saya mengakui bahwa skripsi ini adalah hasil karya saya sendiri, kecuali beberapa kutipan dan ringkasan yang masing- masing disebutkan sumbernya.
Medan
PENGHARGAAN
Puji dan syukur penulis ucapkan kepada Tuhan Yang Maha Esa, atas kasih dan berkatnya penulis dapat menyelesaikan skripsi ini. Dalam waktu yang ditetapakan.
Ucapan terima kasih saya sampaikan kepada:
1. Drs. Marwan Harahap, M.Eng dan Prof. Dr. Tulus, M.Si selaku pembimbing pada penyelesaian skripsi ini yang telah memberikan panduan dan kepercayaan kepada saya untuk menyelesaikan skripsi ini
2. Drs. Suwarno Ariswoyo. M.Si dan Dra. Mardiningsih, M.Si selaku pembanding dalam penyelesaian skripsi ini yang telah memberikan panduan dan kepercayaan kepada saya dalam menyelesaikan skripsi ini 3. Dekan dan Pembantu Dekan Fakultas Matematika dan Ilmu Pengetahuan
Alam Universitas Sumatera Utara, semua dosen pada program S1 Matematika
4. Kedua orang tua saya J. Hasibuan dan P. Hutajulu serta kakak dan adik sayaserta seluruh keluarga yang telah mendukung saya selama ini
5. Teman-teman yang telah membantu saya Vera M Siahaan, Sunarto Urjoyo Purba, teman-teman satu jurusan dan keluarga besar FMIPA saya ucapkan terima kasih
ABSTRAK
Analisis uji waktu hidup adalah salah satu analisis statistik yang banyak digunakan pada dunia industri dan kesehatan. Ada tiga metode yang umum digunakan dalam pengamatan waktu hidup. Sampel lengkap dimana pengamatan berhenti setelah semua sampel yang diamati mati,sensor tipe I pengamatan dilakukan selama unit waktu tertentu, sensor tipe II pengamatan berhenti setelah n kegagalan. Data waktu hidup adalah sampel acak yang mempunyai distribusi peluang. Dengan maximum likelihood dapat diestimasi bentuk dari parameter waktu hidup dari distribusi peluang waktu hidup itu, dan dalam skripsi ini penulis memakai distribusi gamma dan sensor tipe I dari data waktu hidup dengan mengunakan maximum likelihood. Fungsi likelihood dalam mengestimasi sensor tipe I adalah
[
]
n rr i
t F t
f t
L −
= −
=
∏
( ) 1 ( )) , (
1
θ sehingga
ABSTRACT
Lifetime analysis is one of the statistic analysis which is many use in industry and health. There are three general method which is often used in lifetime data analysis. Complete sample which is the observation stoped when all the observation failed, type I censored the observation stopped during at an unit time, type II censor the observation stoped at n failure. Lifetime data is random sample which is has a probability distribution. With maximum likelihood can be estimate the parameter the form of lifetime data from its probability distribution, and in this thesis writer use a gamma distribution and censoring type I of lifetime data and it is estimate by maximum likelihood estimator. The likelihood form of estimating censoring type I is
[
]
n rr i
t F t
f t
L −
= −
=
∏
( ) 1 ( )) , (
1
θ , hence can be easier to know the characteristic of a
DAFTAR ISI
Halaman
Persetujuan ii
Pernyataan iii
Penghargaan iv
Abstrak v
Abstract vi
Daftar isi vii
Daftar Gambar ix
Bab 1 Pendahuluan 1.1 Latar Belakang 1
1.2 Perumusan Masalah 2
1.3 Tinjauan Pustaka 2
1.4 Tujuan Penelitian 5
1.5 Kontribusi Penelitian 5
1.6 Metode Penelitian 5
Bab 2 Landasan Teori
2.1 Ruang Sampel dan Kejadian 6
2.2 Peluang Suatu Kejadian 7
2.3 Peluang acak dan Distribusi Peluang 7
2.3.1 Peubah Acak 7
2.3.2 Distribusi Peluang 7
2.4 Sejarah Teori Keandalan 9
2.6 Sistem Keandalan 15 2.6.1 Sistem Keandalan Seri 15 2.6.2 Sistem Keandalan Paralel 17 2.6.2.1 Sistem Keandalan Paralel Kelebihan Aktif 17 2.6.2.2 Sistem Keandalan Paralel Kelebihan Pasif 19 2.6.3 Kombinasi Sistem Seri dan Paralel 19
2.7 Data Tersensor 22
2.8 Distribusi 23
2.9 Distribusi Kerusakan 24
2.10 Prinsip Dasar Metode Maximum Likelihood 26 Bab 3 Pembahasan dan Hasil
3.1 Estimasi Parameter untuk Data Waktu Hidup yang Berdistribusi 27 Gamma Pada Data Tersensor Tipe I dengan metode Maximum likelihood
3.2 Contoh Kasus 31
Bab 4 Kesimpulan dan Saran
4.1 Kesimpulan 35
4.2 Saran 36
DAFTAR GAMBAR
Gambar 2.1 Sistem Keandalan Seri 16
Gambar 2.2 Sistem Keandalan Paralel Kelebihan Aktif 18 Gambar 2.3 Sistem Keandalan Paralel Kelebihan Pasif 19
Gambar 2.4 Sistem Seri-Paralel 20
ABSTRAK
Analisis uji waktu hidup adalah salah satu analisis statistik yang banyak digunakan pada dunia industri dan kesehatan. Ada tiga metode yang umum digunakan dalam pengamatan waktu hidup. Sampel lengkap dimana pengamatan berhenti setelah semua sampel yang diamati mati,sensor tipe I pengamatan dilakukan selama unit waktu tertentu, sensor tipe II pengamatan berhenti setelah n kegagalan. Data waktu hidup adalah sampel acak yang mempunyai distribusi peluang. Dengan maximum likelihood dapat diestimasi bentuk dari parameter waktu hidup dari distribusi peluang waktu hidup itu, dan dalam skripsi ini penulis memakai distribusi gamma dan sensor tipe I dari data waktu hidup dengan mengunakan maximum likelihood. Fungsi likelihood dalam mengestimasi sensor tipe I adalah
[
]
n rr i
t F t
f t
L −
= −
=
∏
( ) 1 ( )) , (
1
θ sehingga
ABSTRACT
Lifetime analysis is one of the statistic analysis which is many use in industry and health. There are three general method which is often used in lifetime data analysis. Complete sample which is the observation stoped when all the observation failed, type I censored the observation stopped during at an unit time, type II censor the observation stoped at n failure. Lifetime data is random sample which is has a probability distribution. With maximum likelihood can be estimate the parameter the form of lifetime data from its probability distribution, and in this thesis writer use a gamma distribution and censoring type I of lifetime data and it is estimate by maximum likelihood estimator. The likelihood form of estimating censoring type I is
[
]
n rr i
t F t
f t
L −
= −
=
∏
( ) 1 ( )) , (
1
θ , hence can be easier to know the characteristic of a
BAB 1
PENDAHULUAN
1.1 Latar Belakang
Didalam melakukan kegiatan suatu alat atau mesin yang bekerja, kita mengenal adanya waktu hidup atau life time. Waktu hidup adalah lamanya waktu hidup suatu komponen atau unit pada keadaan operasional tertentu. Misalnya sebuah bola lampu mengalami kerusakan setelah dipakai selama 3000 jam, disini dikatakan bahwa waktu hidup lampu tersebut adalah 3000 jam. Analisis statistika yang digunakan untuk menguji data waktu hidup disebut analisis tahan hidup.
Dari waktu hidup yang diperoleh dari percobaan uji hidup dapat berbentuk data lengkap, data tersensor tipe I dan data tersensor tipe II. Berbentuk data lengkap jika semua benda dalam percobaan semuanya mati. Berbentuk data tersensor tipe I jika data uji hidup dihasilkan setelah percobaan berjalan dalam waktu yang ditentukan, serta berbentuk data tersensor tipe II jika observasi diakhiri setelah sejumlah kematian atau kegagalan tertentu telah terjadi (Lawless. 1982:43).
dalam mengambarkan frekuensi kegagalan suatu komponen atau sistem terhadap waktu dan merupakan distribusi yang tepat untuk memecahkan masalah teori antrian dan keandalan.
Untuk mengetahui apakah distribusi dari data dalam fungsi tahan hidup yang diasumsikan telah mengambarkan keadaan yang sesunguhnya, diperlukan suatu analisis terhadap waktu hidup. Langkah untuk menganalisis terhadap fungsi distribusi dari data waktu hidup adalah dengan mengestimasi harga parameter distribusinya
Ide dasar dari metode maximum likelihood adalah mencari nilai parameter yang memberi kemungkinan (likelihood) yang paling besar untuk mendapatkan data yang terobservasi sebagai estimator. Cara memaksimumkan likelihood berkaitan dengan estimasi dalam statistik. Cara mendapat estimasi untuk nilai parameter dengan memaksimumkan fungsi kemungkinan. Jika diberikan sampel random, n sampel dari populasi yang mempunyai distribusi peluang maka didapat cara untuk mengestimasi parameter distribusinya.
Berdasarkan urain tersebut diatas maka mendorong penulis untuk mengangkat skripsi yang berjudul “Estimasi Parameter untuk Data Waktu Hidup yang Berdistribusi Gamma pada data tersensor tipe I dengan metode maximum Likelihood”.
Masalah dalam penelitian ini adalah bagaimana mengestimasi parameter untuk data waktu hidup yang berdistribusi gamma untuk data tersensor tipe I dengan metode maximum likelihood
1.3 Tinjauan Pustaka
Misalkan variabel random T menunjukan waktu hidup dari organisme dalam populasi. Waktu hidup T merupakan variabel random kontinu dan non negatif dalam interval (0,∞). Fungsi tahan hidup adalah probabilitas suatu individu dapat bertahan hidup sampai pada waktu t (t >0). Maka fungsi distribusi kumulatif F(t)untuk distribusi kontinu dengan fungsi densitas probabilitas f(t) dinyatakan sebagai berikut (lawless. 1982).
) ( )
(t P T t
F = ≤
Atau
∫
= t f x dx
t F
0 ) ( )
( untuk t>0
Oleh karena itu diperoleh fungsi tahan hidup yang didefenisikan dengan.
) ( 1
) ( 1
) ( ) (
t F
t T P
t T P t S
− =
≤ − =
Sensor tipe I, semua fungsi yang diteliti (n) masuk pengujian pada waktu yang bersamaan dan pengujian dihentikan setelah batas waktu yang ditentukan. Kelemahan sensor tipe I adalah sampai batas waktu yang ditentukan semua objek tetap hidup, sehingga tidak terdapat data tahan hidup dari objek yang diuji.
Distribusi gamma merupakan distribusi yang digunakan dalam mengambarkan waktu hidup, distribusi gamma dapat dianggap sama dengan distribusi eksponensial atau poison, dimana pada distribusi poison dipakai waktu sebagai variabel. Sedang pada distribusi gamma dipakai pertambahan jumlah sebagai variabel tetapi keduanya mempunyai karakteristik populasi yang sama.
t
e t t
f η λ
η
η
λ − −
Γ
= 1
) ( )
(
.
t>0, n >0, λ>0
Dengan: t = waktu
η = parameter bentuk
λ= parameter skala
jika x adalah variabel acak gamma dengan parameter λdann maka rata-rata dan variansnya adalah sebagai berikut (Montgomery.2204:131).
λ η
µ =E( X)= dan 2
2
) (
λ η
σ =V X =
! ) ( ) ( 1 0 k e t t R t k n k λ λ − − =
∑
=Fungsi laju kegagalan
) ( ) ( ) ( t R t f t h =
Dengan fungsi gamma Γ(n)=(n−1)!
Metode maximum likelihood pertama dibahas oleh R.A Fisher pada tahun 1920, misalkan x1,x2,..xn, menyatakan peubah acak yang saling bebas dengan fungsi padat peluangnya dinyatakan dengan f(x,θ) dengan θ parameter yang akan ditaksir dengan metode maximum likelihood, maka fungsi padat peluangnya adalah:
) ( ) ,.... , ( ) , ( ) ( ).... , ( ). , ( ) , ,.. , , ( 2 1 1 2 1 1 θ θ θ θ θ θ θ L x x x L x f x f x f x f x x x f n i n i n n = = = =
∏
= Dengan: = n x xx1, 2,... variabel random
θ = parameter yang ditaksir
) (θ
1.4. Tujuan Penelitian
Menyajikan estimasi maximum likelihood dalam penggunaannya bersama teori keandalan untuk mendapatkan estimasi dari data tahan hidup berdistribusi gamma tersensor tipe I.
1.5. Kontribusi Penelitian
Dengan mengetahui estimasi parameter dari data berdistribusi gamma pada data tersensor tipe I dapat memudahkan peneliti untuk menghitung atau menaksir karakteristik dari data uji waktu hidup suatu komponen atau sistem.
1.6. Metode Penelitian
BAB 2
LANDASAN TEORI
2.1 Ruang sampel dan Kejadian
Definisi 1
Himpunan semua hasil yang mungkin dari suatu percobaan disebut ruang sampel dan dinyatakan dengan S (Montgomery, 2004: 17).
Tiap hasil dari ruang sampel disebut unsur atau anggota ruang sampel tersebut atau dengan istilah titik sampel.
Contoh:
Suatu percobaan melantunkan sebuah dadu, bila yang diselidiki adalah kemungkinan semua nomor yang muncul maka ruang sampelnya.
} 6 , 5 , 4 , 3 , 2 , 1 {
=
S
Definisi 2
Kejadian adalah himpunan bagian dari ruang sampel suatu percobaan.
Misalkan ruang sampel dari pelantunan dua mata uang sebanyak satu kali adalah
} , , ,
{mm mb bm bb
S = , m menyatakan muka dan b menyatakan belakang. Misalkan himpunan bagian dari percobaan yang menghasilkan satu muka dan satu belakang dinyatakan sebagai berikut E ={mb,bm}
2.2 Peluang Suatu Kejadian
Teori peluang mempelajari tentang peluang terjadinya suatu kejadian atau peristiwa.Peluang dinyatakan antara 0 dan 1,
Teorema
Bila suatu percobaan dapat menghasilkan N macam hasil yang berkemungkinan sama dan bila tepat sebanyak n dari hasil berkaitan dengan kejadian A, maka peluang kejadian A:
N A n A
P( )= ( )
2.3 Peubah Acak dan Distribusi Peluang
2.3.1 Peubah Acak
Ada dua macam peubah acak, yaitu peubah acak diskrit dan peubah acak kontinu. Dikatakan peubah acak diskrit adalah jika semua himpunan nilai yang mungkin dari suatu peubah acak merupakan himpunan terbilang (countable set). Dikatakan peubah acak kontinu adalah jika himpunan semua nilai yang mungkin dari suatu peubah acak merupakan selang bilangan real.
2.3.2 Distribusi Peluang
Fungsi f(x) adalah suatu fungsi peluang atau distribusi peluang suatu peubah acak diskrit X bila, untuk setiap hasil x yang mungkin.
1. f(x)≥0
2. ( ) 0
1
=
∑
= in i
x f
3.Pr(X = x)= f(x)
Definisi 3
Distribusi kumulatif F(x) suatu peubah acak diskrit X dengan distribusi peluang
) (x
f dinyatakan oleh
) ( )
Pr( ) (
1
i n i
x f x
X x
F
∑
=
= = =
Fungsi f(x) adalah fungsi padat peluang peubah acak kontinuX , maka fungsi densitas probabilitasnya f(x)adalah sebagai berikut:
1. f(x)≥0 untuk semua x∈R 2.
∫
( ) =1∞
∞ −
dx x f
3. P a x b f t dt
t ) ( )
(
0
∫
= ≤ ≤
Definisi 5
Distribusi kumulatif F(x) suatu peubah acak kontinu X dengan fungsi padat peluang f(x) dinyatakan oleh
dx x f x
X P x F
t ) ( )
( ) (
0
∫
= ≥
=
Definisi 6
) ( ),... ( ). ( ) ,..., ,
(x1 x2 xn f1 x1 f2 x2 fn xn
f =
Jika sampel random yang berukuran n tersebut diurutkan dalam suatu urutan naik maka disebut statistik terurut atau order statistik dari X1,X2,...,Xn dan dinyatakan dengan X1n,X2n,..,Xnn. Misalkan X1,X2,...,Xn adalah sampel random yang berukuran n dan fungsi distribusi probabilitasnya f(x) kontinu dan
b x a x
f( )>0, < < maka fungsi densitas probabilitas dari statistik terurut ke-k< X k adalah:
[
( )] [
1 (]
( ))! ( )! 1 (
! )
( 1 k
k n k k
k k
k F x F x f x
k n k
n X
g − − −
− −
= jika a< Xk<b
2.4 Sejarah Teori Keandalan
Keandalan adalah keadaan terbaik suatu kerja pada periode yang ditentukan untuk sebuah komponen atau sistem, keandalan didefinisikan sebagai peluang komponen atau suatu sistem tidak akan gagal pada waktu t.
Konsep keandalan pada umumnya digunakan pada waktu yang berisiko tinggi dan membahayakan, contohnya pada industri penerbangan, kegagalan yang mendadak dan kegagalan yang terlalu sering sangat membahayakan dan berisiko tinggi terjadinya kecelakaan. Dari segi ekonomi dan manusiawi sangat merugikan, untuk itu dituntut keandalan sistem yang terbaik.
2.5 Konsep Dasar Distribusi Tahan Hidup
Fungsi-fungsi pada distribusi tahan hidup merupakan suatu fungsi yang menggunakan variabel tertentu. Waktu hidup adalah interval waktu yang diamati dari suatu individu saat perama kali masuk dalam pengamatan hingga keluar dari pengamatan. Misalnya pengamatan suatu mahluk hidup. Variabel random nonnegatif waktu hidup kontinu dinotasikan T dan akan membentuk suatu distribusi. Distribusi dari waktu hidup dapat disajikan sebagai fungsi berikut:
1. Fungsi Kepadatan Peluang
Fungsi kepadatan peluang suatu probabilitas kegagalan suatu sistem dalam interval waktu dari t sampai t+∆t, dengan waktu T merupakan variabel random. Fungsi kepadatan peluang dinyatakan dengan.
∆< +∆ ≤
= ∆→
t t t T t P Lim x
f
t
)) (
( )
(
0
0 ) (t =
f untuk t<0 dan ( ) 1 0
=
∫
∞
dt t f
2. Fungsi Tahan Hidup
Fungsi Tahan hidup adalah peluang suatu sistem bertahan hidup lebih dari waktu t dengan t>0fungsi tahan hidup dinyatakan S(t)
) ( 1 ) ( )
( ) (
0
t F dx
x f t
T P t
S = ≥ =
∫
= −∞
Dalam beberapa hal khususnya yang mencakup tahan hidup dari komponen-komponen industri,. S(t) dinyatakan sebagai fungsi reliabilitas.
Dalam hal ini fungsi tahan hidup S(t) merupakan fungsi kontinu menurun secara kontinu denganS(0)=1, artinya peluang suatu sistem bertahan hidup lebih lama dari waktu nol adalah 1 dan S(∞)=0, artinya peluang suatu sistem atau komponen bertahan hidup pada waktu yang tak terhingga adalah 0.
Fungsi hazard adalah probabilitas suatu sistem atau komponen gagal dalam interval waktu dari t sampai t+∆t, jika diketahui suatu sistem atau komponen tersebut masih dapat bertahan hidup sampai dengan waktu t maka fungsi hazard secara matematika dinyatakan sebagai: ∆ ≥ ∆ + < ≤ =∆→ t t T t t T t P t h t ) ( ( lim ) (
0 (2.1)
Misalkan f(t) adalah fungsi densitas probabilitas pada waktu t, maka dari persamaan (2.1) diperoleh
) (
) ( ) (
t S
t f t
h =
Fungsi kegagalan dapat juga diturunkan dengan memisalkan sebuah populasi yang mempunyai item sebesar N dengan distribusi kegagalan F(t). Misal N(t) sebuah variabel acak maka nilai dari peluang sukses item pada waktu t akan membentuk distribusi binomial sebagai berikut:
[
]
[ ]
R t[
R t]
n Nn N n
N n
t N
P ( ) n 1 ( ) N n 0,1,2,...,
)! (
! ! )
( − =
− =
= −
Nilai harapan dari N(t) adalah
[ ]
( ) ( ) ( )__ t N t NR t
N
E = = , sehingga
[ ]
N t N N
t N E t
R( )= ( ) = ( ) (2.2)
Maka fungsi distribusi kumulatif dapat dinyatakan dengan mengunakan persamaan (2.2) diperoleh:
N t N
t R t
F
) ( 1
) ( 1 ) (
− =
− =
N t N N − ( )
Dan
dt t dF t
f( )= ( )
dt t N d
N
) ( 1
−
=
3. Fungsi Kegagalan
Fungsi hazard adalah probabilitas suatu sistem atau komponen gagal pada waktu t sampai t+∆t , jika diketahui sistem atau komponen tersebut masih dapat bertahan hidup sampai dengan waktu t, maka fungsi hazard dapat dinyatakan sebagai berikut
) ( ) ( lim
) (
) ( ) ( lim ) (
0 0
t f t N
N
t t N
t t N t N t
h
t t
→ ∆
→ ∆
=
∆ ∆ + − =
) (
) ( ) (
t R
t f t
h = (2.3)
\
[
ln ( )]
) ( 1 ) ( ) ( t N dt d t N dt t N d t h − = − = Atau c dx x h t N t + − =∫
0 ) ( ) (ln (2.4)
Karena N(0)=N =1, maka diperoleh
) ( ln ) ( 0 t N dx x h t = −
∫
−=
∫
th x dxN 0 ) ( exp Sehingga − =
=
∫
h x dxN t N t R t ) ( exp ) ( ) ( 0 (2.5)
Dari uraian diatas diperoleh hubungan antara f(t),h(t),R(t)sebagai berikut:
ii.
) (
) ( ) (
t R
t f t h =
iii.
−
=
∫
th x dxt R
0 ) ( exp )
( .
Dengan demikian dapat dilihat bahwa ketiga fungsi pada distribusi waktu hidup yaitu
) ( ), (t h t
f , dan R(t) saling berhubungan satu dengan yang lainnya.
2.6 Sistem Keandalan
Dalam konsep keandalan juga terdapat beberapa sistem yang dinyatakan untuk membantu menentukan apakah suatu sistem gagal secara total atau tidak.
Dalam suatu proses tidak mudah menentukan kriteria-kriteria kegagalan dalam sistem tersebut. Sebagai contoh perhatikan sistem kegagalan dalam sistem sebuah mobil. Jika tidak dapat berjalan, maka mobil tersebut dinyatakan telah rusak atau gagal sistemnya. Namun haruskah rusaknya lampu depan sebuah mobil dikatakan kegagalan sistem secara total, walaupun mobil dapat digunakan pada cuaca cerah tetapi tidak dapat digunakan secara total pada waktu gelap atau pada malam hari. Oleh karena itu kerusakan sistem sering dikatakan oleh kegagalan atau kerusakan dari komponen-komponennya.
2.6.1. Sistem Keandalan Seri
Suatu sistem dapat dibedakan dengan susunan seri jika komonen-komponen yang ada dalam sistem itu harus bekerja dan berfungsi seluruhnya agar sistem tersebut sukses dalam menjalankan fungsinya. Atau dengan kata lain jika ada satu komponen saja yang tidak bekerja, maka akan mengakibatkan sistem tersebut gagal dalam menjalankan fungsinya.
Secara diagram, sistem keandalan seri dapat dilihat pada gambar 2.1
Gambar 2.1 Reliability Block Diagram
Diagram pada gambar 2.1 sering disebut Diagram Blok Keandalan/ Reliability Block Diagram (RDB). Perlu diperhatikan bahwa diagram itu tidak mewakili setiap
komponen yang dihubungkan secara seri, tetapi menunjukkan bagaimana komponen-komponen itu diperlakukan dari sudut pandang keandalan.
Jika ada n buah komponen dalam susunan seri dan masing-masing memiliki indeks keandalan R1R2,....,Rn, seperti terlihat pada gambar 2.1, maka secara umum sistem keandalan seri dinyatakan sebagai berikut:
i n i n
S R R R R
R
∏
=
= ⋅ ⋅ ⋅ =
1 2
1 ,...
Sedangkan ekspresi ketakandalan dari sistem dengan susunan seri dari n buah komponen adalah.:
∏
=− = −
= n
i i
S R
R Q
1
1
1
2.6.2. Sistem Keandalan Paralel
Pada sistem keandalan paralel, kerusakan pada setiap komponen dalam suatu sistem tidak akan menyebabkan kerusakan sistem secara total, atau sering disebut failure tolerant (kerusakan yang dapat ditolerir).
Pada kelebihan aktif, dua atau lebih unit diletakkan dalam sistem keandalan paralel dimana secara normal pembagian fungsi dilakukan tetapi unit-unit tersebut diatur sedemikian hingga jika satu unit atau mungkin lebih mengalami kerusakan, maka sisanya dapat mengantikan posisinya. Sebagai contoh adalah dua mesin pesawat terbang yang diaktifkan tetapi tidak menutup kemungkinan pesawat untuk terbang dengan satu mesin, apabila mesin yang satunya mengalami kerusakan.
Pada kelebihan pasif, satu unit secara normal memegang fungsi secara penuh tetapi jika unit tersebut mengalami kerusakan, maka unit yang lain akan diaktifkan untuk mengambil alih posisinya.
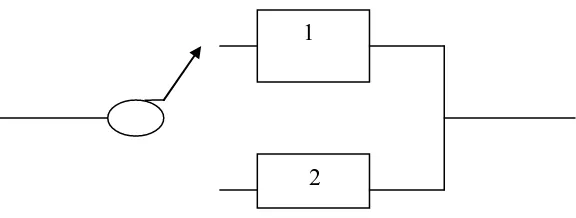
2.6.2.1. Sistem Keandalan Paralel Kelebihan Aktif
[image:32.595.156.389.478.574.2]Misalkan ada dua unit (1) dan (2) dihubungkan dalam sistem paralel seperti terlihat pada gambar 2.2
Gambar 2.2 Sistem Keandalan Paralel Kelebihan Aktif
Sistem akan rusak apabila 1 dan 2 kedua-duanya mengalami kerusakan. Keandalan sistem didefenisikan sebagai berikut, jika didefinisikan Q (ketakandalan sistem)
1
Maka
) (E1 E2 P
Q= ∩
Dimana E adalah kejadian independen bebas sehingga diperoleh:
∏
= −= n
i
i R Q
1
) 1
(
Jika peluang kegagalan adalah independen, maka fungsi sistem keandalannya adalah:
∏
= − −=
n i
i
p R
R
1
) 1 (
1
2.6.2.2. Sistem Keandalan Paralel Kelebihan Pasif
Pada sistem keandalan pasif, unit utama (1) secara normal membawa fungsi secara penuh dan unit siaga (2) dibawa untuk digunakan ketika unit utama mengalami kerusakan.
Gambar 2.3 Sistem Keandalan Paralel Kelebihan Pasif
Cara untuk menganalisis sistem ini adalah harus mempertimbangkan bahwa sistem kegagalan waktu adalah variabel acak yang mengandung jumlah dua variabel acak, yaitu kegagalan waktu (1) dan (2).
Jika R1(t)+R2(t)=exp(−λt)
2.6.3. Kombinasi Sistem Seri dan Paralel
Kombinasi dari sistem seri dan paralel dapat diselesaikan dengan menggabungkan masing-masing subsistem ke dalam komponen seri maupun paralel terlebih dahulu.
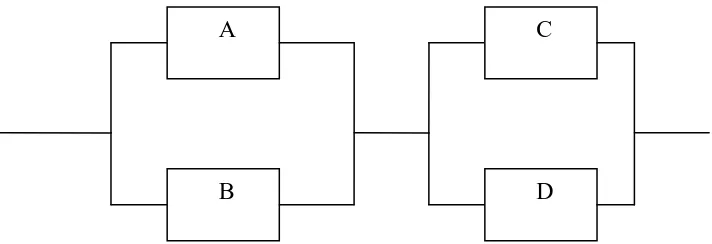
Untuk lebih memahami sistem kombinasi seri-paralel, akan diberikan contoh gambar 2.4 dan 2.5.
1
Gambar 2.4 sistem seri-paralel
Gambar 2.5 sistem seri-paralel A
B
C
D A
B
C
Dari kedua gambar, gambar (2.4) menunjukkan sistem keandalan seri paralel. Untuk menyelesaikan sistem gabungan ini pertama-tama gabungkan subsistem paralel kedalam bentuk yang sama dengan komponen seri.
Misalkan: RA=0,9,RB =0,8,RC =0,7,RD =0,8
Maka penyelesaian untuk gambar 2.4 dapat dituliskan:
98 , 0
02 , 0 1
) 2 , 0 )( 1 , 0 ( 1
= − =
− =
AB
R
Dan
88 , 0
12 , 0 1
) 4 , 90 ) 3 , 0 ( 1
= − =
− =
CD
R
Maka keandalan sistem secara keseluruhan adalah
8624 , 0 ) 88 , 0 )( 98 , 0
( =
=
S
R
63 , 0 ) 7 , 0 )( 9 , 0 ( = = AC R Dan 48 , 0 ) 6 , 0 )( 8 , 0 ( = = Bd R
Sehingga keandalan sistem secara keseluruhan adalah:
8076 , 0 1924 , 0 1 ) 52 , 0 )( 37 , 0 ( 1 ) 48 , 0 1 )( 63 , 0 1 ( 1 ) 1 )( 1 ( 1 = − = − = − − − = − − −
= ac Bd
S R R
R
2.7 Data Tersensor
Ada tiga macam metode yang sering digunakan dalam percobaan uji hidup, yaitu sebagai berikut:
1. Sampel lengkap, dalam uji sampel lengkap percobaan akan dihentikan jika semua komponen yang diuji telah mati atau gagal. Cara seperti ini mempunyai keuntungan yaitu dapat dihasilkan observasi terurut dari semua komponen yang diuji.
2. Sensor tipe I, semua objek yang diteliti (n) masuk pengujian dalam waktu yang bersamaan, dan pengujian dihentikan setelah batas waktu t yang ditentukan. Kelemahan dari sensor tipe I ini bila terjadi sampai batas waktu t0 yang ditentukan semua objek masih hidup sehingga tidak diperoleh data tahan hidup dari objek yang diteliti
3. Sensor tipe II, semua objek yang diteliti (n) masuk pengamatan dalam waktu yang bersamaan, dan pengujian dihentikan setelah mendapatkan r objek gagal atau mati, dengan 1≤r n . Kelemahan dari sensor tipe II ini adalah waktu yang diperlukan untuk mendapatkan r objek yang matibisa terjadi sangat panjang, tetapi pasti diperoleh data tahan hidup dari r objek tersebut.
2.8 Distribusi
x n x
q p x n x
n x
f −
− =
)! ( !
! )
(
Jika x adalah variabel acak binaomial dengan parameter p (peluang suatu sistem atau komponen mengalami kerusakan) dan n (banyaknya observasi) maka mean dan varians distribusi binomial dinyatakan sebagai berikut:
np
=
µ dan σ2 =np(1− p)=npq
Misalkan x adalah variabel acak yang mempunyai distribusi binomial, dimana p adalah peluang kegagalan suatu sistem atau komponen. Misalkan λ= pn, maka dapat dinyatakan sebagai berikut
x n x
n n
x n x X P
− − =
= ) λ 1 λ
(
Andaikan nilai n semakin besar dan nilai p sangat kecil, maka dapat ditunjukan sebagai berikut
! ) ( lim
x e x X P
x n
λ
λ
α = =
→
Andaikan p besar dan n juga besar distribusi binomial akan membentuk distribusi normal yang dinyatakan sebagai berikut:
2 2
2 ) (
2 1 )
( σ
µ
τ − − =
x
e n x
f
2.9 Distribusi Kerusakan
Didalam menentukan distribusi kerusakan tidak ada aturan-aturan yang mutlak untuk memakai hubungan matematik tertentu pada distribusi tersebut. Ini harus didasarkan pada konsep yang paling cocok. Beberapa distribusi kerusakan antara lain:
1. Distribusi Eksponensial
t
e t
f( )=λ λ
Dimana, λ = laju kegagalan
2. Distribusi Weibull
0 , 1 exp )
( 1 >
−
= t − t
t f
χ β
β α
αβ
Dimana:
=
=
β parameter bentuk
=
α parameter skala
3. Distribusi Gamma
t r r
e t r t
f λ − −λ
Γ
= 1
) ( ) (
Dimana:
=
λ Parameter skala
η=Parameter bentuk t =Waktu
Dengan mean dan varians
λ η
µ =E( X)= dan 2
2
) (
λ η
σ =V X =
Fungsi reliabilitas
! ) ( )
( 1
0 k
e t t
R
t k n
k
λ
λ −
−
=
∑
=
) ( ) ( ) ( t R t f t h =
2.10 Prinsip Dasar Metode Maximum Likelihood
Metode maximum likelihood pertama dibahas oleh R.A Fisher pada tahun 1920, misalkan x1,x2,...xn, menyatakan peubah acak yang saling bebas dengan fungsi padat peluangnya dinyatakan dengan f(x,θ) dengan θ parameter yang akan ditaksir dengan metode maximum likelihood, maka fungsi padat peluangnya adalah:
) ( ) ,.... , ( ) , ( ) ( ).... , ( ). , ( ) , ,.. , , ( 2 1 1 2 1 1 θ θ θ θ θ θ θ L x x x L x f x f x f x f x x x f n i n i n n = = = =
∏
= Dengan: = n x xx1, 2,... variabel random
θ = parameter yang ditaksir
) (θ
L = fungsi likelihood
Penduga maximum likelihood dari θ didapat dengan menyelesaikan persamaan ln( ) =0
∂ ∂
BAB 3
PEMBAHASAN DAN HASIL
3.1 EStimasi Parameter untuk Data Waktu Hidup yang Berdistribusi Gamma Pada Data Tersensor Tipe I dengan Maximum Likelihood
Dalam memudahkan untuk mempelajari atau mengetahui karakteristik populasi, sering terjadi pengambilan sampel, dan untuk mendapatkan penaksir yang baik dari suatu populasi dapat dilihat hubungan fungsional antara variabel-variabel yang mempengaruhi data sampel. Hubungan fungsional ini digambarkan dengan fungsi matematik, yaitu fungsi distribusi.
Oleh karena itu dalam skripsi ini penulis memilih suatu distribusi probabilitas kontinu untuk mengambarkan uji waktu hidup yang akan ditaksir parameternya dengan mengunakan metode maximum likelihood.
Fungsi distribusi probabilitas dari distribusi gamma adalah sebagai berikut:
) ( )
(
1
η
λ λ
Γ = ntn−e− t
t f
) ( ... ) ( ) ( ) ( ) , ln( 2 1 1 2 1 1 1 1 η θ η θ η θ η θ θ θ η θ η η ϑ η η θ η η Γ ⋅ ⋅ Γ ⋅ Γ = Γ = − − − − − − − =
∏
n i t n t t t i n i e t e t e t e t t= ti
i n i n
e tη θ
η η θ − − =
∏
Γ 1 1 )( (3.1) Kemudian ditarik logaritma natural dari fungsi likelihood (3.1), sehingga diperoleh fungsi likelihood dari distribusi gamma sebagai berikut.
[ ]
[ ]
[ ]
in i i n i t n i i n i t i n i n n t i n i n t t n n e t n n e t e t t L i i i
∑
∑
∑
∑
∏
∏
= = − = − = − − = − − = − − + Γ − = + + Γ − = + Γ − = Γ = 1 1 1 1 1 1 1 1 1 ln ) 1 ( ) ( ln ln ln ln ) ( ln ln ln ) ( ln ln ) ( ln ) , ( ln θ η η θ η η θ η η θ η θ θ θ η θ η θ η η=
[ ]
in i i n i t n t
n
∑
∑
= = − Γ − − + 1 1 ) ( ln ) ln( ) 1 (
lnθ η η θ
η (3.2)
Untuk mendapatkan penaksir θ maka persamaan (3.2) diturunkan terhadapθ .Turunan dari log likelihoodnya adalah sebagai berikut
Estimator maximum likelihood θˆ didapat dengan menyelesaikan persamaan
0 ) , ln(
= ∂ ∂
θ θ
r
, sehingga diperoleh
t n
t t n
t n
n i
i n i
i n i
i
= = =
= −
∑
∑
∑
= = =
θ η θ η
θη θη
1 1 1
0
t
η
θˆ= (3.3)
Dengan
=
θˆ Penaksir θ
η=Parameter bentuk
t =Rata-rata waktu kegagalan
c r n t T i r i ) ( 1 + + =
∑
=Fungsi likelihood untuk estimasi parameter tersensor tipe 1 adalah:
[
]
( )1 2
1, ,..., ) ( ) 1 ( )
,
( i n r
r
i
r f t F t
t t t L − = − =
∏
θ
(3.4)Dengan: = ) ,..., , ,
( t1 t2 tr
L
θ
Fungsi Likelihood=
) (t
f Fungsi densitas probabilitas F(t)= Fungsi distribusi kumulatif n= Banyaknya percobaan r= Banyaknya kegagalan
Karena ) ( ) ( ) ( ) ( 1 0 1 0 η λ η λ η λ η λ η λ η λ η η Τ = Γ = Γ = − − − −
∫
∫
e IGdt e t e dt e t t
F t t t t
Dimana IG =
∫
t t −1e−tdt 0η
(3.5)
Kemudian ditarik logaritma natural (ln) ke dalam fungsi likelihoodnya, sehingga diperoleh fungsi log likelihood dari distribusi gamma tersensor tipe 1 sebagai berikut: ) 6 . 3 ( ) ( 1 ln ) ( )) ( ln( ) ln( ) 1 ( ) ln( ) ( 1 ln ) ( ln ) ( 1 1 ) ( 1 1 Γ − − + − Γ − − + = Γ − Γ =
∑
∑
∏
= = − − − =η
θ
θ
η
η
θ
η
η
θ
η
θ
θ
θ θ η λ η η IG e r n t r t r IG e e t L n i r i r i i r n t i r iDengan menurunkan ln L(θ) terhadap parameter (θ) diperoleh:
IG e IG e r n IG e r n t r IG e IG e r n IG e r n t r IG e IG e r n IG e r n t r L n n i r i i n i i n i θ θ η θ θ η θ η θ η θ η θ η θ η θ η η θ θ θη η ϑ η η θ η θ θη η θ η θ η θ θη θ θ − Γ + − − − − = Γ− Γ Γ − + − − − = Γ = Γ+ − − − − = ∂ ∂ − = − = − =
∑
∑
∑
) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( 1 ) ( ) ( ) ( ) ( ) ( ln 1 1 1 1 1 1Estimator maximum likelihood
θ
ˆ
didapat dengan menyelesaikan persamaan) ( ) ( ln θ θ ∂ ∂ L
= 0, sehingga diperoleh
0
)
(
)
(
)
(
1 1=
−
Γ
+
−
−
−
−
− =∑
n
r
e
IG
n
e
r
IG
e
IG
t
r
i r
i η θ
θ η θ η
θ
η
ηθ
θ
θ
η
(3.7)3.2 Contoh Kasus
Diberikan data waktu hidup dari pengamatan 32 bola lampu yang diasumsikan berdistribusi gamma didapat 23 bola lampu gagal, dengan waktu (jam) kegagalan sebagai berikut:
(Sumber:http//www.weibull.com/lifedata) Dengan parameter bentuk η =1, kemudian akan ditentukan estimasi dari parameter yang diasumsikan berdistribusi gamma.
Penyelesaian
n=23
=
∑
= ir i
t 1
17,88+28,92+33+41,52+42,12+45,6+48,4+51,84+51,96+54,12+55,56+67,8 +68,64+68,64+68,88+84,12+93,12+96,64+105,12+105,84+127,92+128,04 +173,4
=1659,08
13 , 72
23 08 , 1659
= =
t
Kemudian dimasukan kedalam persamaaan (3.2)
01 , 0
13 , 72
1 ˆ
= = =
t
Jadi nilai estimasi untuk parameter θ dari distribusi gamma adalah θˆ =0,01
Sehingga diperoleh nilai fungsi keandalannya dengan memberikan t=175 adalah sebagai berikut ! ) exp( ) ( ) ( 1 0 k t t t R k n k λ λ − =
∑
− =Dimana n−1=22 ,λ t =1,75 dan exp(-1,75)=0,173
995 , 0 ! 22 ) 75 , 1 ( ) 75 , 1 ( ... ! 1 ) 173 , 0 ( ) 75 , 1 ( ! 0 ) 75 , 1 ( ) 75 , 1 ( ! ) exp( ) ( ) ( 22 0 0 0 = + + + = − =
∑
= k T T t R k k λ λMaka keandalan dari komponen yang diuji adalah 0,995
Dan mempunyai fungsi kegagalan sebagai berikut:
) ( ) ( ) ( t R t f t h = Dengan 0017 , 0 ) 1 ( 175 01 , 0 ) ( ) ( 75 , 1 0 1 = Γ× = Γ = − − − e e t t
f θt
η η
η θ
001 , 0
995 , 0
0017 , 0 ) (
= =
t h
Maka laju kegagalan dari komponen yang diuji adalah 0,001/ satuan waktu
BAB 4
KESIMPULAN DAN SARAN
4.1 Kesimpulan
Berdasarkan hasil penelitian yang telah dilakukan, maka dapat diambil kesimpulan sebagai berikut:
1. Estimasi parameter dari distribusi gamma dengan maximum likelihood adalah perbandingan nilai parameter bentuk terhadap rata-rata waktu kegagalan.
2. Untuk mengatasi kelemahan sensor tipe I, dimana pada waktu t yang ditentukan tidak terjadi kegagalan, dapat dilakukan dengan memperbesar lama waktu
pengamatan.
3. Estimasi parameter untuk data waktu hidup berdistribusi gamma pada data tersensor
tipe I adalah
0
)
(
)
(
)
(
11
=
−
Γ
+
−
−
−
−
−=
∑
n
r
e
IG
n
e
r
IG
e
IG
t
r
i r
i η θ
θ η θ
η
θ
η
ηθ
θ
4.2 Saran
1. Skripsi ini hanya membahas estimasi parameter berdistribusi gamma pada data tersensor tipe I,. Oleh karena itu disarankan adanya penelitian lebih lanjut untuk mengestimasi distribusi gamma pada data yang berupa sampel lengkap dan data tersensor tipeII
Daftar Pustaka
Barlow, E, Richard and Proschan, Frank. Mathematical Theory of Reliability. New York:John Wiley and Sons
C, Douglas, Montgomery and C, George, Runger .2004. Applied statistics and Probability for Engineers.New York: John Wiley and Sons
Dudwicz ,E and N, Satya, Mishra.1988. Statistika Matematika Modern. Bandung: ITB Elandt, R.c. and Johnson N.L.1980.Survival Model and Data Analysis. New York:
John Wiley and Sons
Kapur, K.C and Lamberson, L.r. Reliability in Engineering Design. New York: John Wiley and sons
Lawless, J K.1982. Statistic Models and Method for Lifetime Data. John Wiley and Sons
Scheaffer, M, Wackerly.1981. Mathematical Statistics with Application. USA : Division of Wardwarth
Tanis and Hogg.2001.Probability and Statistical Inference.New Jersey: John Wiley and sons.
Yang, Guangbin. 2007. Life Cycle Reliability Engineering. New Jersey: John Wiley and Sons