DAFTAR PUSTAKA
Agfianto Eko Putra, 2002, Belajar Mikrokontroler AT89S51/52 Teori dan Aplikasi, Edisi ke-1, Yogyakarta, Gava Media.
Andi, 2003, Panduan Praktis Teknik Antarmuka dan Pemrograman Mikrokontroler
AT89S51, Jakarta, PT Elex Media Komputindo.
Endra Pitawarno, 2006, Robotika, Jilid 1, Jakarta, ANDI.
Firdaus, SQL Server dengan Visual Basic 6.0 untuk orang awam, Penerbit Maxikom, Palembang 2006.
Firdaus, 7 Jam Belajat Interaktif Visual Basic 6.0 untuk orang awam, Penerbit Maxikom, Palembang 2006.
Malvino, Albert paul, Prinsip-prinsip Elektronika, Jilid 1 & 2, Edisi Pertama, Penerbit: Salemba Teknika, Jakarta, 2003.
Moh.Ibnu Malik, 2003, Belajar Mikrokontroler Atmel AT89S51, Edisi ke-1, Yogyakarta, Gava Media.
Wardana, Membuat Lima Program Dahsyat di Visual Basic 6.0, Penerbit PT Elex Media Komputindo, Jakarta, 2005.
Widodo, S.Si, Mkom, Interfacing Komputer dan Mikrokontroler, Penerbit: Elex Media Komputindo, Jakarta, 2004.
http://www.Spc Dc motor.Com Diakses tanggal 8 februari 2013 http://www.Atmel.Com. Diakses tanggal 8 februari 2013
BAB III
PERANCANGAN ALAT DAN PROGRAM
3.1. Blok Diagram Sistem
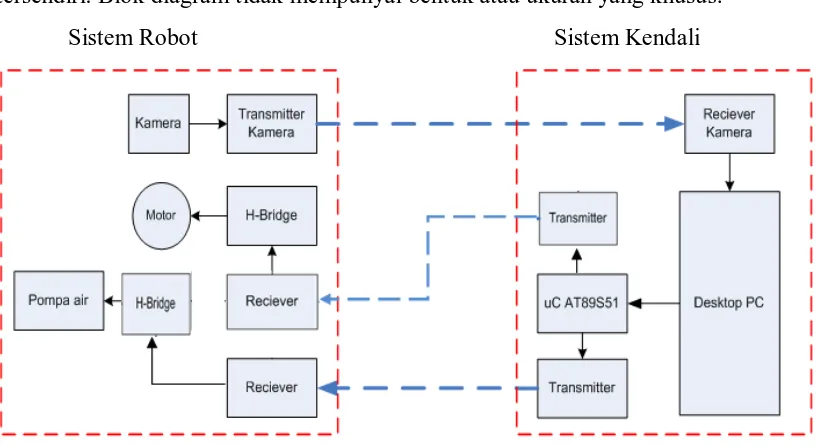
Blok diagram merupakan penyederhanaan dari rangkaian yang menyatakan hubungan berurutan dari satu atau lebih rangkaian yang memiliki kesatuan kerja tersendiri. Blok diagram tidak mempunyai bentuk atau ukuran yang khusus.
Sistem Robot Sistem Kendali
Gambar 3.1. Blok Diagram
Secara umum, prototipe robot pemadam api terkendali pada penelitian ini terdiri dari dua buah sistem yang terpisah yaitu sistem robot dan sistem kendali. Pada sistem robot terdiri dari sistem actuator dan sistem visual, sedangkan pada sistem kendali terdiri dari PC dan sistem kontrol robot.
Pada sistem kendali terdapat sebuah PC sebagai otak dari keseluruhan sistem. Pada PC inilah nantinya semua data akan diolah sebelum dikirimkan hasilnya ke robot. Agar dapat mengirimkan data secara jarak jauh pada sistem ini dilengkapi dengan transmitter. Mikrokontroller AT89S51 pada sistem kendali berfungsi sebagai alat interfacing antara sistem pemancar dengan PC. Metode interfacing yang digunakan pada sistem kendali digunakan metode paralel. Metode paralel sudah cukup baik untuk digunakan pada sistem interface ini. Data visual dari kamera akan diterima terlebih dahulu oleh receiver kamera sebelum hasilnya ditampilkan ke monitor PC, input data pengendalian robot dilakukan dengan cara mengklik command-command yang terdapat pada layout program dengan menggunakan mouse. Dengan demikian, dengan adanya kedua sistem di atas kita sudah bisa membuat sebuah robot yang dapat dimonitoring dan dikendalikan secara jarak jauh.
3.2. Rangkaian Mikrokontroler AT89S51
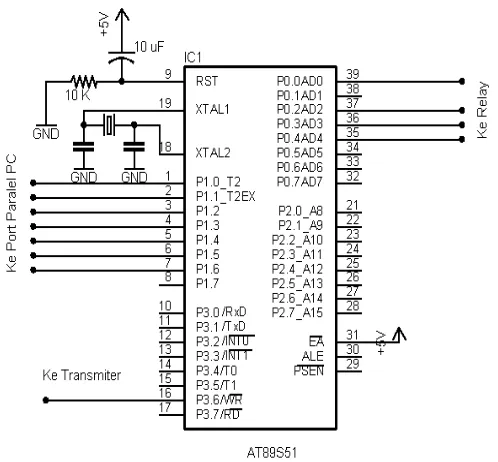
Rangkaian ini berfungsi untuk mengendalikan seluruh sistem. Komponen utama dari rangkaian ini adalah IC mikrokontroler AT89S51. Pada IC inilah semua program diisikan, sehingga rangkaian dapat berjalan sesuai dengan yang dikehendaki. Rangkaian mikrokontroler ditunjukkan pada gambar berikut ini:
Gambar 3.2 Rangkaian mikrokontroller AT89S51
port 3 Pin 40 dihubungkan ke sumber tegangan 5 volt. Dan pin 20 dihubungkan ke ground. Rangkaian mikrokontroler ini menggunakan komponen kristal 12 MHz sebagai sumber clocknya. Nilai kristal ini akan mempengaruhi kecepatan mikrokontroler dalam mengeksekusi suatu perintah tertentu.
Pada pin 9 dihubungkan dengan sebuah kapasitor 10 uF yang dihubungkan ke positif dan sebuah resistor 10 Kohm yang dihubungkan ke ground. Kedua komponen ini berfungsi agar program pada mikrokontroler dijalankan beberapa saat setelah power aktif. Lamanya waktu antara aktifnya power pada IC mikrokontroler dan aktifnya program adalah sebesar perkalian antara kapasitor dan resistor tersebut. Jika dihitung maka lama waktunya adalah :
10 10 1 det
tR x C Kx F m ik
Jadi 1 mili detik setelah power aktif pada IC kemudian program aktif.
Pada perancangan ini PORT 0 dihubungkan ke rangkaian relay, rangkaian relay ini dihubungkan dengan transmitter yang akan mengendalikan pergerakan motor roda robot. PORT 3.6 dihubungkan dengan transmitter yang akan mengendalikan pompa air. PORT 1 dihubungkan dengan port parallel pada komputer.
3.3. Rangkaian Relay
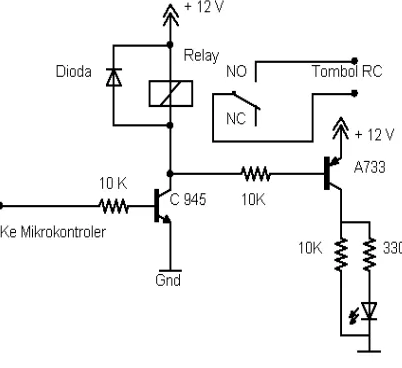
Relay ini berfungsi sebagai saklar elektronik yang fungsinya untuk menekan/melepaskan tekanan pada tombol transmitter. Transmitter yang digunakan adalah transmitter radio remote control. Rangkaian relay tampak seperti gambar di bawah ini ,
Relay merupakan salah satu komponen elektronik yang terdiri dari lempengan logam sebagai saklar dan kumparan yang berfungsi untuk menghasilkan medan magnet. Pada rangkaian ini digunakan relay 12 volt, ini berarti jika positif relay (kaki 1) dihubungkan ke sumber tegangan 12 volt dan negatif relay (kaki 2) dihubungkan ke ground, maka kumparan akan menghasilkan medan magnet, dimana medan magnet ini akan menarik lempengan yang mengakibatkan saklar (kaki 3) terhubung ke kaki 4. Dengan demikian, kita dapat mengunakan kaki 3 dan kaki 4 pada relay sebagai saklar untuk menghubungkan tombol pada radio remote control.
Pada rangkaian ini untuk mengaktifkan atau menon-aktifkan relay digunakan transistor tipe NPN. Dari gambar dapat dilihat bahwa negatif relay dihubungkan ke kolektor dari transistor NPN (2SC945), ini berarti jika transistor dalam keadaan aktif maka kolektor akan terhubung ke emitor dimana emitor langsung terhubung ke ground yang menyebabkan tegangan di kolektor menjadi 0 volt, keadaan ini akan mengakibatkan relay aktif. Sebaliknya jika transistor tidak aktif, maka kolektor tidak terhubung ke emitor, sehingga tegangan pada kolektor menjadi 12 volt, keadaan ini menyebabkan tidak aktif.
Kumparan pada relay akan menghasilkan tegangan singkat yang besar ketika relay dinon-aktifkan dan ini dapat merusak transistor yang ada pada rangkaian ini. Untuk mencegah kerusakan pada transistor tersebut sebuah dioda harus dihubungkan ke relay tersebut. Dioda dihubungkan secara terbalik sehingga secara normal dioda ini tidak menghantarkan. Penghantaran hanya terjadi ketika relay dinonaktifkan, pada saat ini arus akan terus mengalir melalui kumparan dan arus ini akan dialirkan ke dioda. Tanpa adanya dioda arus sesaat yang besar itu akan mengalir ke transistor, yang mengakibatkan kerusakan pada transistor.
Untuk menentukan tipe transistor yang digunakan, maka harus diketahui arus yang mengalir pada relay. Relay yang digunakan adalah JZC-4123, relay ini membutuhkan arus 34 mA untuk dapat bekerja, maka transistor yang digunakan harus dapat mengalirkan arus 34 mA pada kolektornya. Pada alat ini digunakan transistor tipe NPN C945, yang dapat mengalirkan arus maksimal 100 mA pada kolektornya.
3.4. Perancangan Rangkaian Antar muka Paralel Port
Rangkaian antar muka paralel port dengan mikrokontroler ditunjukkan pada gambar berikut :
Gambar 3.4. Rangkaian Antar muka Paralel Port
Rangkaian ini menggunakan konektor DB 25 yang merupakan konektor untuk paralel port. Konektor DB 25 ini langsung dihubungkan dengan mikrokontroler AT89S51, yaitu pada port 1. Dengan demikian, maka komputer dapat berkomunikasi dengan mikrokontroler.
3.5. Kamera Wireless
Kamera yang digunakan pada robot adalah kamera CCTV (Closed Circuit Television) wireless. Gambar kamera cctv wireless ditunjukkan pada gambar dibawah ini
Kamera ini menggunakan sumber tegangan dari baterei 9 volt. Di dalam kamera terdapat sebuah sensor CMOS (Complementary Metal Oxide Semiconductor). CMOS adalah sebuah alat yang mengubah gambar optik ke sinyal-sinyal listrik menggunakan MOS (metal oxide semiconductor) transistor. Sumber informasi gambar yang telah diubah menjadi sinyal listrik akan dipancarkan dalam bentuk gelombang elektromagnetik melalui antena pada transmitter yang terdapat pada kamera yang akan ditangkap oleh antena penerima.
Gambar penerima kamera cctv wireless ditunjukkan pada gambar berikut:
Gambar 3.6 receiver kamera wireless
Alat penerima ini menggunakan catu daya dari adaptor 9 volt yang dihubungkan ke listrik PLN. Antena penerima yang terdapat pada receiver menangkap gelombang elektromagnetik yang dipancarkan oleh antena pemancar pada transmitter yang akan diubah menjadi sinyal listrik.
Gambar tv tuner ditunjukkan pada gambar berikut:
Gambar 3.7 TV Tuner
Tv tuner internal dipasang pada slot expansional card di CPU komputer, kemudian software tv tuner diinstalkan di dalam PC (Personal Computer). Hasil dari penginstalan yang sempurna akan memunculkan icon TVR Plus secrara otomatis pada desktop PC.
Input video card ini dihubungkan ke output dari penerima kamera cctv wireless, kemudian akan diproses oleh susunan komponen yang ada dalam perangkat video card yang kemudian diubah menjadi gambar yang akan ditampilkan pada monitor komputer. Dengan mengklik dua kali icon TVR Plus yang ada dilayar desktop maka aplikasi tv tuner tersebut akan terbuka dan tampilan yang ditangkap oleh kamera cctv wireless dapat ditampilkan di komputer.
3.6. Radio Frekuensi Transmiter dan Receiver
Radio frekuensi transmitter dan receiver yang digunakan adalah radio frekuensi transmitter dan receiver yang ada pada mobil-mobilan remot kontrol.
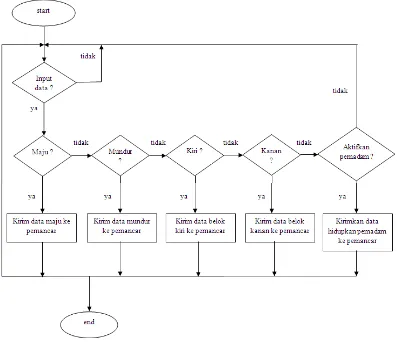
3.7. Perancangan Flow Chart ( Diagram Alir Program )
Flow chart adalah gambaran tentang proses – proses yang terjadi pada suatu program. Untuk merancang suatu program perlu dibuat flow chart terlebih dahulu. Dengan menggunakan flow chart dapat diketahui perintah – perintah atau instruksi – instruksi yang dilaksanakan pada program dan sub – sub program. Adapun diagram alir (
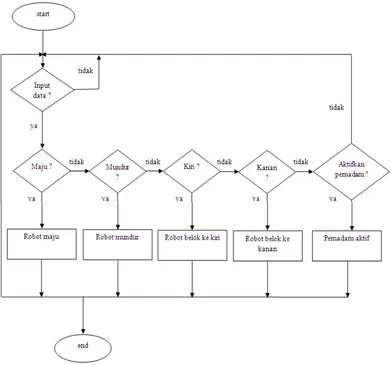
flowchart ) dari program pengendalian pada PC dan robot ditunjukkan pada gambar
berikut :
Gambar 3.9 Flowchart pada robot
3.8. Perancangan Program.
Pada perancangan program ini, Program ditulis atau dibuat dengan menggunakan Visual Basic 6.0. Pada Visual Basic sebenarnya tidak ada batasan antara sub program dengan program utama. Karena dalam sistem pemrogramannya sub – sub program ini akan langsung dijalankan jika terjadi suatu aksi pada program misalnya penekanan tombol perintah atau pemilihan menu. Jadi pada program Visual Basic setelah sub – sub program dibuat, program utama tidak dibuat lagi karena pemanggilan sub – sub program tergantung pemakai itu sendiri.
Pada perancangan ini, sub – sub program yang harus dibuat adalah : 1. Sub program Command1_Click()
5. Sub program Command5_Click()
Adapun sub – sub program di atas akan dijelaskan sebagai berikut : 1. Sub program Command1_Click()
Sub program Command1_Click() adalah sebagai berikut: Private Sub Command1_Click()
PortOut (&H378), 1 End Sub
Perintah ini akan mengirimkan data 1 desimal ke port 378 heksa ( parallel port). Perintah ini akan memberikan data logika high pada D0, pada port 378 sebagai berikut:
D7 D6 D5 D4 D3 D2 D1 D0 378 0 0 0 0 0 0 0 1
Data ini akan dikenali oleh mikrokontroler sebagai perintah maju 2. Sub program Command2_Click()
Sub program Command2_Click() adalah sebagai berikut: Private Sub Command2_Click()
PortOut (&H378), 2 End Sub
Perintah ini akan mengirimkan data 2 desimal ke port 378 heksa ( parallel port). Perintah ini akan memberikan data logika high pada D1, pada port 378 sebagai berikut:
D7 D6 D5 D4 D3 D2 D1 D0 378 0 0 0 0 0 0 1 0
Sub program Command3_Click() adalah sebagai berikut: Private Sub Command3_Click()
PortOut (&H378), 8 End Sub
Perintah ini akan mengirimkan data 8 desimal ke port 378 heksa ( parallel port). Perintah ini akan memberikan data logika high pada D3, pada port 378 sebagai berikut:
D7 D6 D5 D4 D3 D2 D1 D0 378 0 0 0 0 1 0 0 0
Data ini akan dikenali oleh mikrokontroler sebagai perintah belok kiri. 4. Sub program Command4_Click()
Sub program Command4_Click() adalah sebagai berikut: Private Sub Command4_Click()
PortOut (&H378), 4 End Sub
Perintah ini akan mengirimkan data 4 desimal ke port 378 heksa ( parallel port). Perintah ini akan memberikan data logika high pada D2, pada port 378 sebagai berikut:
D7 D6 D5 D4 D3 D2 D1 D0 378 0 0 0 0 0 1 0 0
Data ini akan dikenali oleh mikrokontroler sebagai perintah mundur. 5. Sub program Command5_Click()
Sub program Command5_Click() adalah sebagai berikut: Private Sub Command5_Click()
PortOut (&H378), 16 End Sub
D7 D6 D5 D4 D3 D2 D1 D0 378 0 0 0 1 0 0 0 0
Data ini akan dikenali oleh mikrokontroler sebagai perintah berhenti. 6. Sub program Command6_Click()
Sub program Command6_Click() adalah sebagai berikut: Private Sub Command6_Click()
PortOut (&H378), 32 End Sub
Perintah ini akan mengirimkan data 32 desimal ke port 378 heksa ( parallel port). Perintah ini akan memberikan data logika high pada D5, pada port 378 sebagai berikut:
D7 D6 D5 D4 D3 D2 D1 D0 378 0 0 1 0 0 0 0 0
Data ini akan dikenali oleh mikrokontroler sebagai perintah menyemprotkan air.
7. Sub program Command7_Click()
Sub program Command7_Click() adalah sebagai berikut: Private Sub Command7_Click()
PortOut (&H378), 64 End Sub
Perintah ini akan mengirimkan data 64 desimal ke port 378 heksa ( parallel port). Perintah ini akan memberikan data logika high pada D6, pada port 378 sebagai berikut:
D7 D6 D5 D4 D3 D2 D1 D0 378 0 1 0 0 0 0 0 0
Data ini akan dikenali oleh mikrokontroler sebagai perintah mematikan semprotan air.
8. Sub program Form_Load()
Timer1.Enabled = False Text1.Text = ""
End Sub
Perintah ini akan menonaktifkan timer 1 dan mengosongkan isi pada text1. 9. Sub program Option1_Click()
Sub program Option1_Click() adalah sebagai berikut: Private Sub Option1_Click()
Sub program Option2_Click() adalah sebagai berikut: Private Sub Option2_Click() merupakan program yang akan dijalankan jika dipilih tombol.
11.Sub program Timer1_Timer()
End If
Sub program ini akan membandingkan 1 digit paling kanan dari penekanan tombol keyboard, kemudian mengirimkan nilai pada port parallel sesuai dengan tombol keyboard yang ditekan.
Jika ditekan “W” atau “w” maka program akan mengirimkan data 1 desimal ke port 378 heksa ( parallel port). Perintah ini akan memberikan data logika high pada D0, pada port 378 sebagai berikut:
D7 D6 D5 D4 D3 D2 D1 D0 378 0 0 0 0 0 0 0 1
Data ini akan dikenali oleh mikrokontroler sebagai perintah maju sama dengan ketika tombol maju ditekan.
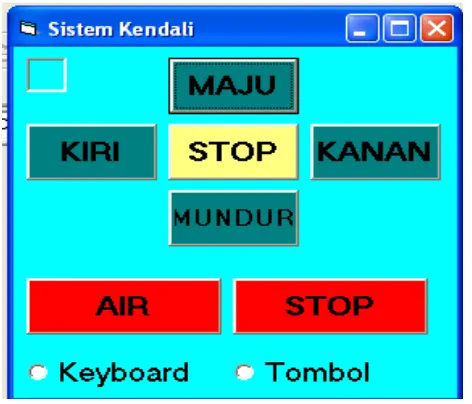
3.8.1. Perancangan Layout Program
Layout program ini dirancang dengan menggunakan project1. Layout program ditunjukkan pada gambar berikut:
BAB IV
PENGUJIAN ALAT DAN ANALISA PROGRAM
4.1 Pengujian software
Adapun tujuan pengujian software adalah untuk mengetahui bahwa program serta perangkat yang berhubungan dengan PC telah dapat menjalankan fungsinya dengan baik. Dalam pengujian ini diperlukan peralatan – peralatan sebagai berikut:
1. Komputer PC dengan spesifikasi pentium 4 2. Sistem operasi Windows XP
3. Program Visual Basic versi 6.0
4. Hardware (meliputi rangkaian keseluruhan)
Pengujian awal dilakukan dengan menghubungkan rangkaian ke PC, dimana DB 25 male dari rangkaian dihubungkan ke DB 25 female yang ada di komputer, selanjutnya membuat program dengan menggunakan bahasa pemrograman visual basic 6.0 untuk mengendalikan port parallel.
Pengujian Paralel Port
Untuk mengendalikan port parallel dengan menggunakan bahas pemrograman visual basic diperlukan sebuah dll. Pada perancangan ini digunakan io.dll. io.dll ini dimasukkan ke sistem32 pada windows selanjutnya mendeklarasikan penggunaan io.dll pada listing program.
Deklarasi io.dll pada bahasa pemrograman visual basic adalah sebagai berikut:
Private Declare Sub PortOut Lib "IO.DLL" (ByVal Port As Integer, ByVal Data As Byte)
Langkah selanjutnya adalah mengendalikan port parallel, dimana port parallel berada pada alamat port [378]. Programnya sebagai berikut:
PortOut &H378, &H1
Perintah ini akan memberikan data logika high pada D0 dan logika low pada D1 s/d D7, pada port 378 sebagai berikut:
D7 D6 D5 D4 D3 D2 D1 D0
378 0 0 0 0 0 0 0 1
Dari hasil pengujian didapatkan tegangan sebagai berikut:
Pin9 Pin8 Pin7 Pin6 Pin5 Pin4 Pin3 Pin2
D7 D6 D5 D4 D3 D2 D1 D0
378 0,22 0,22 0,22 0,22 0,22 0,22 0,22 2,97
Pengujian kedua dilakukan dengan memberikan data yang berbeda pada port parallel. Programnya sebagai berikut:
PortOut &H378, &H2
Perintah ini akan memberikan data logika high pada D1 dan logika low pada D0 s/d D7, kecuali D1 pada port 378 sebagai berikut:
Pin9 Pin8 Pin7 Pin6 Pin5 Pin4 Pin3 Pin2
D7 D6 D5 D4 D3 D2 D1 D0
378 0 0 0 0 0 0 1 0
Dari hasil pengujian didapatkan tegangan sebagai berikut:
Pin9 Pin8 Pin7 Pin6 Pin5 Pin4 Pin3 Pin2
D7 D6 D5 D4 D3 D2 D1 D0
378 0,22 0,22 0,22 0,22 0,22 0,22 2,96 0,22
Pengujian ketiga.
Programnya sebagai berikut: PortOut &H378, &H4
Pin9 Pin8 Pin7 Pin6 Pin5 Pin4 Pin3 Pin2
D7 D6 D5 D4 D3 D2 D1 D0
378 0 0 0 0 0 1 0 0
Dari hasil pengujian didapatkan tegangan sebagai berikut:
Pin9 Pin8 Pin7 Pin6 Pin5 Pin4 Pin3 Pin2
D7 D6 D5 D4 D3 D2 D1 D0
378 0,22 0,22 0,22 0,22 0,22 2,96 0,22 0,22
Pengujian keempat.
Programnya sebagai berikut: PortOut &H378, &H8
Perintah ini akan memberikan data logika high pada D3 dan logika low pada D0 s/d D7, kecuali D3 pada port 378 sebagai berikut:
Pin9 Pin8 Pin7 Pin6 Pin5 Pin4 Pin3 Pin2
D7 D6 D5 D4 D3 D2 D1 D0
378 0 0 0 0 1 0 0 0
Dari hasil pengujian didapatkan tegangan sebagai berikut:
Pin9 Pin8 Pin7 Pin6 Pin5 Pin4 Pin3 Pin2
D7 D6 D5 D4 D3 D2 D1 D0
378 0,22 0,22 0,22 0,22 2,96 0,22 0,22 0,22
4.2. Pengujian Rangkaian minimum mikrokontroller AT89S51
Loop:
Program di atas bertujuan untuk menghidupkan LED yang terhubung ke P3.7 selama ± 0,13 detik kemudian mematikannya selama ± 0,13 detik secara terus menerus. Perintah Setb P3.7 akan menjadikan P3.7 berlogika high yang menyebabkan LED mati. Acall tunda akan menyebabkan LED ini mati selama beberapa saat. Perintah Clr P3.7 akan menjadikan P3.7 berlogika low yang menyebabkan LED akan nyala. Perintah Acall tunda akan menyebabkan LED ini nyala selama beberapa saat. Perintah Sjmp Loop akan menjadikan program tersebut berulang, sehingga akan tampak LED tersebut tampak berkedip.
Lamanya waktu tunda dapat dihitung dengan perhitungan sebagai berikut : Kristal yang digunakan adalah kristal 11.0592 MHz, sehingga 1 siklus mesin
Mnemonic Siklus Waktu Eksekusi
MOV Rn,#data 2 2 x 1,085 μd = 2,17 μd
DJNZ 2 2 x 1,085 μd = 2,17 μd
Tunda:
μdetik atau 0,142.214205 detik dan dapat dibulatkan menjadi 0,14 detik.
Jika program tersebut diisikan ke mikrokontroller, kemudian mikrokontroller dapat berjalan sesuai dengan program yang diisikan, maka rangkaian minimum mikrokontroller telah bekerja dengan baik.
4.3. Pengujian Rangkaian Relay
Pengujian rangkaian relay pengendali penekanan pada tombol remote RC dapat dilakukan dengan memberikan tegangan 5 volt dan 0 volt pada basis transistor C945. Transistor C945 merupakan transistor jenis NPN, transistor jenis ini akan aktif jika pada basis diberi tegangan > 0,7 volt dan tidak aktif jika pada basis diberi tegangan < 0,7 volt. Aktifnya transistor akan mengaktifkan relay. Pada alat ini relay digunakan untuk menekan tombol pada remote radio kontrol, dimana hubungan yang digunakan adalah normally open (NO), dengan demikian jika relay tidak aktif maka penekanan pada remote terlepas, sebaliknya jika relay aktif, maka penekanan pada remote aktif. Pengujian dilakukan dengan memberikan tegangan 5 volt pada basis transistor, jika relay aktif dan remote tertekan, robot merespone maka rangkaian ini telah berfungsi dengan baik.
Program yang harus diisikan untuk mengaktifkan transistor yang akan mengaktifkan relay, sehingga tombol tertekan adalah sebagai berikut,
Setb P0.0
Dan untuk melepaskan tekanan pada tombol RC pogram yang harus diisikan adalah, Clr P0.0
Dengan demikian kita sudah dapat mengendalikan Robot dengan melalui program.
Pengujian software keseluruhan
Tampilan software secara keseluruhan ketika dijalankan adalah sebagai berikut:
Masing–masing command buttom di atas ketika diklick akan mengirimkan perintah ke mikro selanjutnya akan direspon oleh robot. Dari hasil pengujian didapatkan data sebagai berikut :
No. Tindakan Respone Robot
1 Tombol Maju Di-Click Robot Maju
3 Tombol Mundur Di-Click Robot Mundur
4 Tombol Kiri Di-Click Robot Belok Ke Arah Kiri
5 Tombol Stop Di-Click Robot Berhenti
6 Tombol Air Di-Click Robot Menyemprotkan air
7 Tombol Stop (air) Di-Click Robot berhenti menyemprotkan air 8 Tombol keyboard “W” atau “w” ditekan Robot Maju
9 Tombol keyboard “D” atau “d” ditekan Robot Belok Ke Arah Kanan 10 Tombol keyboard “Z” atau “z” ditekan Robot Mundur
11 Tombol keyboard “A” atau “a” ditekan Robot Belok Ke Arah Kiri 12 Tombol keyboard “S” atau “s” ditekan Robot Berhenti
13 Tombol keyboard “O” atau “o” ditekan Robot Menyemprotkan air
14 Tombol keyboard “I” atau “i” ditekan Robot berhenti menyemprotkan air
BAB V
KESIMPULAN DAN SARAN
5.1. Kesimpulan
1. Telah berhasil dirancang sebuah robot sederhana pemadam api terkendali yang dilengkapi dengan kamera cctv wireless, gambar yang diterima oleh kamera akan dikirim ke receiver kamera yang akan diinputkan ke input video card untuk ditampikan di monitor pada PC.
2. Komunikasi antara mikrokontroler dan komputer dapat menggunakan komunikasi parallel.
5.2. Saran
1. Diharapkan program ini dapat dikembangkan lagi, sehingga dapat menambah fungsi dari robot.
BAB 2
TINJAUAN PUSTAKA
2.1. Perangkat Keras
2.1.1. Mikrokontroler AT89S51
Mikrokontroler sebagai suatu terobosan teknologi mikrokontroler dan mikrokomputer, hadir memenuhi kebutuhan pasar (market need) dan teknologi baru. Sebagai teknologi baru, yaitu teknologi semikonduktor dengan kandungan transistor yang lebih banyak namun hanya membutuhkan ruang kecil serta dapat diproduksi secara massal (dalam jumlah banyak) sehingga harga menjadi lebih murah (dibandingkan mikroprosesor). Sebagai kebetuhan pasar, mikrokontroler hadir untuk memenuhi selera industri dan para konsumen akan kebutuhan dan keinginan alat-alat bantu dan mainan yang lebih canggih.
Ilustrasi yang mungkin bisa memberikan gambaran yang jelas dalam penggunaan mikrokontroler adalah aplikasi mesin tiket dalam arena permainan yang saat ini terkenal di Indonesia. Jika kita sudah selesai bermain, maka akan diberikan suatu nilai, nilai inilah yang menentukan berapa jumlah tiket yang bisa diperoleh dan jika dikumpulkan dapat ditukar dengan berbagai macam hadiah. Sistem tiket ini ditangani dengan mikrokontroler, karena tidak mungkin menggunakan komputer PC yang harus dipasang di samping (atau di belakang) mesin permainan yang bersangkutan.
Tidak seperti sistem komputer, yang mampu menangani berbagai macam program aplikasi (misalnya pengolah kata, pengolah angka dan lain sebagainya), mikrokontroler hanya bisa digunakan untuk satu aplikasi tertentu saja. Perbedaan lainnya terletak pada perbandingan RAM dan ROM-nya. Pada sistem komputer RAM dan ROM-nya besar. Sedangkan pada mikrokontroler ROM dan RAM-nya terbatas. Pada mikrokontroler AT89S51 ROM atau flash PEROM berukuran 2 kilo byte, sedangkan RAM-nya berukuran 128 byte.
2.1.2. Kontruksi AT89S51
Mikrokontrol AT89S51 hanya memerlukan tambahan 3 kapasitor, 1 resistor dan 1 kristal serta catu daya 5 Volt. Kapasitor 10 mikro-Farad dan resistor 10 kilo ohm dipakai untuk membentuk rangkaian reset. Dengan adanya rangkaian reset ini AT89S51 otomatis direset begitu rangkaian menerima catu daya. Kristal dengan frekuensi maksimum 24 MHz dan kapasitor 30 piko-Farad dipakai untuk melengkapi rangkaian oscilator pembentuk clock yang menentukan kecepatan kerja mikrokontroler.
Memori merupakan bagian yang sangat penting pada mikrokontroler. Mikrokontroler memiliki dua macam memori yang sifatnya berbeda.
Read Only Memory (ROM) yang isinya tidak berubah meskipun IC kehilangan catu
daya. Sesuai dangan keperluannya, dalam susunan MCS-51 memori penyimpanan progam ini dinamakan sebagai memori progam.
Random Access Memori (RAM) isinya akan sirna begitu IC kehilangan catu
daya, dipakai untuk menyimpan data pada saat progam bekerja. RAM yang dipakai untuk menyimpan data ini disebut sebagai memori data.
Ada berbagai jenis ROM. Untuk mikrokontroler dengan progam yang sudah baku dan diproduksi secara masal, progam diisikan ke dalam ROM pada saat IC mikrokontroler dicetak di pabrik IC. Untuk keperluan tertentu mikrokontroler mengunakan ROM yang dapat diisi ulang atau Programble-Eraseable ROM yang disingkat menjadi PEROM atau PROM. Dulu banyak dipakai UV-EPROM (Ultra
Violet Eraseable Progamble ROM) yang kemudian dinilai mahal dan ditinggalkan
Jenis memori yang dipakai untuk Memori Program AT89S51 adalah Flash PEROM, program untuk mengendalikan mikrokontroler diisikan ke memori itu lewat bantuan alat yang dinamakan sebagai AT89S51 Flash PEROM Programmer.
Memori Data yang disediakan dalam chip AT89S51 sebesar 128 byte, meskipun hanya kecil saja tapi untuk banyak keperluan memori kapasitas itu sudah cukup.
Sarana Input/Ouput yang disediakan cukup banyak dan bervariasi. AT89S51 mempunyai 32 jalur Input/Ouput. Jalur Input/Ouput paralel dikenal sebagai Port 1 (P1.0..P1.7) dan Port 3 (P3.0..P3.5 dan P3.7).
AT89S51 dilengkapi UART (Universal Asyncronous Receiver/Transmiter) yang biasa dipakai untuk komunikasi data secara seri. Jalur untuk komunikasi data seri (RXD dan TXD) diletakan berhimpitan dengan P3.0 dan P3.1 di kaki nomor 10 dan 11, sehingga kalau sarana input/ouput yang bekerja menurut fungsi waktu. Clock penggerak untaian pencacah ini bisa berasal dari oscillator kristal atau clock yang diumpan dari luar lewat T0 dan T1. T0 dan T1 berhimpitan dengan P3.4 dan P3.5, sehingga P3.4 dan P3.5 tidak bisa dipakai untuk jalur input/ouput parelel kalau T0 dan T1 dipakai.
AT89S51 mempunyai enam sumber pembangkit interupsi, dua diantaranya adalah sinyal interupsi yang diumpankan ke kaki INT0 dan INT1. Kedua kaki ini berhimpitan dengan P3.2 dan P3.3 sehingga tidak bisa dipakai sebagai jalur input/output parelel kalau INT0 dan INT1 dipakai untuk menerima sinyal interupsi.
Port1 dan 2, UART, Timer 0,Timer 1 dan sarana lainnya merupakan register yang secara fisik merupakan RAM khusus, yang ditempatkan di Special Functoin
Regeister (SFR).
2.1.3. SFR (Register Fungsi Khusus ) Pada Keluarga 51
Sekumpulan SFR atau Special Function Register yang terdapat pada Mikrokontroler Atmel Keluarga 51 ditunjukan pada tabel 2.1, pada bagian sisi kiri dan kanan dituliskan alamat-alamatnya dalam format heksadesimal.
menimbulkan efek sama sekali. Pengguna perangkat lunak sebaiknya jangan menuliskan ‘1’ pada lokasi-lokasi ‘tak bertuan’ tersebut, karena dapat digunakan untuk mikrokontroler generasi selanjutnya. Dengan demikian, nilai-nilai reset atau non-aktif dari bit-bit baru ini akan selalu ‘0’ dan nilai aktifnya adalah ‘1’. Berikut akan dijelaskan secara singkat SFR-SFR beserta fungsinya:
Tabel 2.1. Peta Register Fungsi Khusus – SFR (Special Function Register)
Akumulator
ACC atau akumulator yang menempati lokasi E 0h digunakan sebagai register untuk penyimpanan data sementara, dalam program, instruksi mengacunya sebagai register A (bukan ACC).
Register B
Register B (lokasi D 0h) digunakan selama operasi perkalian dan pembagian, untuk instruksi lain dapat diperlakukan sebagai register scratch pad (“papan coret-coret”) lainnya.
Program Status Word (PSW)
Stack Pointer
Register SP atau Stack Pointer (lokasi 8 1h) merupakan register dengan panjang 8-bit, digunakan dalam proses simpan menggunakan instruksi PUSH dan CALL. Walau
Stack bisa menempati lokasi dimana saja dalam RAM, register SP akan selalu
diinisialisasi ke 07h setelah adanya reset, hal ini menyebabkan stack berawal di lokasi 08h.
Data Pointer
Register Data Pointer atau DPTR mengandung DPTR untuk byte tinggi (DPH) dan byte rendah (DPL) yang masing-masing berada dilokasi 83h dan 82h, bersama-sama membentuk register yang mampu menyimpan alamat 16-bit. Dapat dimanipulasi sebagai register 16-bit atau ditulis dari/ke port, untuk masing-masing Port 0,Port 1, Port2 dan Port 3.
Serial Data Buffer
SBUF atau Serial Data Buffer (lokasi 99h) sebenarnya terdiri dari dua register yang terpisah, yaitu register penyangga pengirim (transmit buffer) dan penyangga penerima
(receive buffer). Pada saat data disalin ke SBUF, maka data sesungguhnya dikirim ke
penyangga pengirim dan sekaligus mengawali transmisi data serial. Sedangkan pada saat data disalin dari SBUF, maka sebenarnya data tersebut berasal dari penyangga penerima.
Time Register
Pasangan register (TH0, TL0) dilokasi 8Ch dan 8Ah,(TH1, TL1) dilokasi 8Dh dan 8Bh serta (TH2, TL2) dilokasi CDh dan CCH merupakan register-register pencacah 16-bit untuk masing-masing Timer 0, Timer 1 dan Timer 2.
Capture Register
memiliki mode isi-ulang-otomatis 16-bit dan RCAP2H serta RCAP2L digunakan untuk menyimpan nilai isi-ulang tersebut.
Kontrol Register
Register-register IP, IE, TMOD, TCON, T2CON, T2MOD, SCON dan PCON berisi bit-bit kontrol dan status untuk sistem interupsi, pencacah/pewaktu dan port serial. Berikut ini merupakan spesifikasi dari IC AT89S51 :
Kompatible dengan produk MCS-51
Empat K byte In-Sistem Reprogammable Flash Memory Daya tahan 1000 kali baca/tulis
Tegangan kerja 4,0 volt sampai 5,5 volt Fully Static Operation : 0 Hz sampai 33 MHz Tiga level kunci memori progam
128 x 8 – bit RAM internal 32 jalur input/output (I/O) Dua 16 bit Timer/Counter Enam sumber interupt Jalur serial dengan UART
2.1.4. Gambar IC Mikrokontroler AT89S51
Gambar IC mikrokontroler AT89S51 ditunjukkan pada gambar 2.1 di bawah ini:
Deskripsi pin-pin pada mikrokontroler AT89S51 : penerima kode byte pada saat flash progamming Pada fungsi sebagai I/O biasa port ini dapat memberikan output sink ke delapan buah TTL input atau dapat diubah sebagai input dengan memberikan logika 1 pada port tersebut. Pada fungsi sebagai low order multiplex address/data, port ini akan mempunyai internal pull up. Pada saat flash progamming diperlukan eksternal pull up, terutama pada saat verifikasi program. Port 2 (Pin 21 – pin 28)
Port 2 berfungsi sebagai I/O biasa atau high order address, pada saat mengakse memori secara 16 bit. Pada saat mengakses memori 8 bit, port ini akan mengeluarkan isi dari P2 special function register. Port ini mempunyai internal pull up dan berfungsi sebagai input dengan memberikan logika 1. Sebagai output, port ini dapat memberikan output sink ke keempat buah input TTL.
Port 3 (Pin 10 – pin 17)
Port 3 merupakan 8 bit port I/O dua arah dengan internal pull up. Port 3 juga mempunyai fungsi pin masing-masing, yaitu sebagai berikut :
Tabel 2.2 Fungsi Pin pada Port 3
P3.6 (pin 16) WR (menulis untuk eksternal data memori) P3.7 (pin 17) RD (untuk membaca eksternal data memori)
RST (pin 9)
Reset akan aktif dengan memberikan input high selama 2 cycle. ALE/PROG (pin 30)
Address latch Enable adalah pulsa output untuk me-latch byte bawah dari alamat selama mengakses memori eksternal. Selain itu, sebagai pulsa input progam (PROG) selama memprogram Flash.
PSEN (pin 29)
Program store enable digunakan untuk mengakses memori progam eksternal. EA (pin 31)
Pada kondisi low, pin ini akan berfungsi sebagai EA yaitu mikrokontroler akan menjalankan progam yang ada pada memori eksternal setelah sistem direset. Jika kondisi high, pin ini akan berfungsi untuk menjalankan progam yang ada pada
Beberapa instruksi yang sering digunakan dalam pemrograman IC mikrokontroler AT89S51 antara lain adalah:
1. Instruksi MOV
Perintah ini merupakan perintah untuk mengisikan nilai ke alamat atau register tertentu. Pengisian nilai dapat secara langsung atau tidak langsung.
Contoh pengisian nilai secara langsung
MOV R0,#20h
MOV 20h,#80h
Tanpa tanda # sebelum bilangan menunjukkan bahwa bilangan tersebut adalah alamat. meneruskan ke perintah pada baris berikutnya.
3. Instruksi ACALL
Instruksi ini berfungsi untuk memanggil suatu rutin tertentu. Contoh :
... pemanggil setelah instruksi ACALL dilaksanakan. Contoh,
...
TUNDA:
...
RET
5. Instruksi JMP (Jump)
Instruksi ini merupakan perintah untuk lompat ke alamat tertentu. Contoh,
Loop:
...
...
JMP Loop
6. Instruksi JB (Jump if bit)
Instruksi ini merupakan perintah untuk lompat ke alamat tertentu, jika pin yang dimaksud berlogika high (1). Contoh,
Loop:
JB P1.0,Loop
...
7. Instruksi JNB (Jump if Not bit)
Instruksi ini merupakan perintah untuk lompat ke alamat tertentu, jika pin yang dimaksud berlogika Low (0). Contoh,
Loop:
JNB P1.0,Loop
...
8. Instruksi CJNE (Compare Jump If Not Equal)
Instruksi ini berfungsi untuk membandingkan nilai dalam suatu register dengan suatu nilai tertentu. Contoh,
Loop:
...
CJNE R0,#20h,Loop
Jika nilai R0 tidak sama dengan 20h, maka program akan lompat ke rutin Loop. Jika nilai R0 sama dengan 20h,maka program akan melanjutkan instruksi selanjutnya..
9. Instruksi DEC (Decreament)
Instruksi ini merupakan perintah untuk mengurangi nilai register yang dimaksud dengan 1. Contoh,
Instruksi ini merupakan perintah untuk menambahkan nilai register yang dimaksud dengan 1. Contoh, searah menjadi tenaga gerak atau energi mekanik, dimana tenaga gerak tersebut berupa putaran pada rotor. Fungsi motor ini berdasarkan gejala bahwa suatu medan magnet mengeluarkan gaya pada penghantar berarus. Prinsip kerjanya adalah apabila sebuah kawat penghantar yang dialiri arus diletakkan antara dua buah kutub magnet, maka pada kawat itu akan bekerja suatu gaya yang menggerakkan kawat itu (gaya Lorentz).
jangkar. Jika jangkar berputar maka dalam lilitan jangkar motor tersebut dibangkitkan gaya gerak listrik (GGL) yang kemudian diubah menjadi mekanik pada rotor. Arah putaran motor DC tergantung pada arah medan dan arah aliran arus pada jangkar. Jika arah medan atau arah aliran arus pada jangkar dibalik, maka putaran motor akan terbalik.
Konstruksi dari motor DC terbagi atas beberapa bagian antara lain: 1) Stator atau bagian yang diam, terdiri dari:
Rumah stator (gander) sebagai tempat jalan mengalirnya medan magnet yang dihasilkan oleh kutub- kutub magnet, dan melindungi bagian- bagian mesin lainnya.
2) Rotor yang berputar, terdiri dari jangkar, lilitan jangkar, komutator, dan sikat- sikat.
Motor arus searah jarang digunakan untuk aplikasi industri umum karena semua sitem utility listrik diperlengkapi dengan perkakas arus bolak- balik. Mekipun demikian, untuk aplikasi khusus, adalah menguntungkan jika mengubah arus bolak- balik menjadi arus searah dengan menggunakan motor dc. Motor arus searah digunakan dimana kontrol torsi dan kecepatan dengan rentang yag lebar diperlukan untuk memenuhi kebutuhan aplikasi.
2.4. Relay
Relay adalah suatu rangkaian switch magnetik yang bekerja bila mendapat catu dan suatu rangkaian trigger. Relay memiliki tegangan dan arus nominal yang harus dipenuhi output rangkaian pendriver atau pengemudinya. Arus yang digunakan pada rangkaian adalah arus DC.
ada lagi arus yang mengalir padanya, posisi normal relay tergantung pada jenis relay yang digunakan. Dan pemakaian jenis relay tergantung pada kadaan yang diinginkan dalam suatu rangkaian.
Menurut kerjanya relay dapat dibedakan menjadi :
a. Normaly Open (NO), saklar akan tertutup bila dialiri arus b. Normaly Close (OFF), saklar akan tertutup bila dialiri arus
c. Change Over (CO), relay ini mempunyai saklar tunggal yang nomalnya tertutup yang lama, bila kumparan 1 dialiri arus maka saklar akan terhubung ke terminal A, sebaliknya bula kumparan 2 dialiri arus maka saklar akan terhubung ke terminal B.
Analogi rangkaian relay yang digunakan pada tugas akhir ini adalah saat basis transistor ini dialiri arus, maka transistor dalam keadaan tertutup yang dapat menghubungkan arus dari kolektor ke emiter yang mengakibatkan relay terhubung. Sedangkan fungsi dioda disini adalah untuk melindungi transistor dari tegangan induksi berlebih, dimana tegangan ini dapat merusak transistor.
Jika transistor pada basis tidak ada arus maju, transistor terbuka sehingga arus tidak mengalir dari kolektor ke emiter, relay tidak bekerja karena tidak ada arus yang mengalir pada gulungan kawat.
Bentuk relay yang digunakan dan bentuk relay dengan rangkaian driver dapat dilihat pada gambar 2.6.
Gambar 2.2. Simbol Relay dan Rangkaian Driver
2.5. Port Paralel PC
Komputer XT/AT buatan IBM atau yang kompetibel pada umumnya menggunakan dua jenis port untuk komunikasi antara komputer dengan dunia luar,
Vcc
Tr VB
Dioda
port tersebut adalah port parallel dan port serial. Di katakan port parallel karena data yang dikirim tau diterima pada port tersebut dengan sisem paralel (serentak), sedangkan port serial data yang dikirim maupun yang diterima dengan sistem serial (bergantian). Kedua sistem tersebut memiliki kekurangan dn kelebihan masing – masing,pada port parallel data yang ditransmisikan memiliki kecepatan yang tinggi, namun dibutuhkan satu kabel per bitnya, sehingga transmisi data menjadi mahal. Sedangkan sistem serial data di transmisikan secara bergantian, sehingga lebih lambat dri sistem parallel. Namun biaya menjadi lebih murah karena hanya membutuhkan satu kabel untuk trasnmisi datanya.
Berikut adalah gambar konektor port parallel DB-25 yang banyak digunakan pada IBM PC XT/AT atau kompatibelnya :
Gambar 2.3 Port Parlel DB 25
Pada komputer tertentu kadang kala port paralelnya berupa connector centronix, namun fungsinya tetap sama hanya berbeda bentuk.
Gambar 2.4. Port Parlel Centronix
Tabel 2.3. Fungsi-Fungsi PIN Port Paralel
Pin No Nama Sinyal Sifat Register
1 Strobe Out Control Inverted
2 Data 0 In/Out Data Ya
3 Data 1 In/Out Data
4 Data 2 In/Out Data
5 Data 3 In/Out Data
6 Data 4 In/Out Data
7 Data 5 In/Out Data
8 Data 6 In/Out Data
9 Data 7 In/Out Data
10 Acknowledge In Status
11 Busy In Status Ya
12 Peper Out In Status
13 Select Out Status
14 Auto Line Feed Out Control Ya
15 Error In Status
16 Initialize Out Control
17 Select In Out Control Ya
18-25 Ground Gnd
Untuk dapat menggunakan port parallel,kita harus mengetahui alamatnya.
Base Address LPT1 biasanya adalah 888 (378h) dan LPT2 biasanya 632
tersebut, yaitu memori 000.0408h untuk base address LPT1 dan memori 0000.040h untuk base address LPT2.
Setelah kita mengetahui alamat port parallel, maka kita dapat menentukan alamat Data Port (CP), dan Status Port (SP).Alamat DP adalah base address dari port parallel tersebut, alamat SP adalah base address +1, dan alamat CP adalah base
address +2.Base Address +1 adalah alamat untuk status port dan Base Address +2
adalah alamat untuk control port.
Tabel berikut adalah tabel alamat masing – masing port yang umumnya digunakan yaitu :
Tabel 2.4. Alamat Pada Port-Port Paralel
Nama Port Alamat Register
LPT1 DP 378h / 888
LPT1 SP 379h / 889
LPT1 CP 37 Ah / 890
2.6. Register-Register Perangkat Lunak
Ketika port pada port pararel, yaitu port data, port status, dan port kontrol, memiliki register prangkat lunak dan masing masing berukuran 8 bit. Susunan bit-bit pada register untuk masing masing port dapat dilihat pada tabel dibawah.
Port Data (alamat 0x378):
D7 D6 D5 D4 D3 D2 D1 D0
Data 7 Data 6 Data 5 Data 4 Data 3 Data 2 Data 1 Data 0 Port Satus (alamat 0x379):
~Busy Ack PE Select Eror - - - port Kontrol (alamat 0x37A):
- - - - ~C3 C2 ~C1 ~C0
- - - - ~Selet in Init ~Auto Feed `Strobe Tabel 2.5. Register Perangkat lunak Pada Port Pararel
Keterangan : Tanda ~ didepan nama sinyal atau bit berarti bahwa sinyal atau bit yang bersangkutan aktif rendah.
Semua keluaran pada Data Port berlogika sebenarnya. Yaitu , menuliskan logika 1 ke salah satu bit pada data port menyebabkan logika 1 pada bit yang bersangkutan. Namun demikian, keluaran-keluaran/SELECT_IN,/AUTO FEED, dan /STROBE pada Control Port berlogika inversi (kebalikan). Artinya, penulisan logika 1 ke salah satu bit pada Control Port menyebabkan logika 0 pada bit yang bersangkutan. Untuk bit bit yang menggunakan logika inversi, hal ini harus diperhatikan agar tidak mengacaukan maksudnya. Untuk itu, bit yang akan dikirimkan tersebut dapat dibalik dengan cara menggunakan fungsi EX-OR (Exclusive OR) sebelum oprasi penulisan.
Sebagai contoh, jika diinginkan mengeluarkan 1000 pada nibble rendah dan tidak melakukan inversi, hardwere akan membalik bit 3, membiarkan bit 2 apa adanya, dan membalik bit 1 dan 0. hasil yang muncul pada keluaran adalah 0011 yang jauh dari yang diharapkan. Dengan menggunakan fungsi EX-OR, 1000 sebenarnya dikirimkan ke port sebagai 0011. Hadware kemudian membalik bit 3,1 dan 0 dan keluaranya adalah 1000 sesuai dengan yang diharapkan.
Semua masukan ini dijemput dengan cara membaca 5-bit tertinggi dan Status Port. Namun demikian, perancang asli rangkaian antar muka printer membalik sinyal BSY secara hardware. Artinya, jika logika 0 ada pada masukan BSY, bit sebenarnya harus dibaca sebagai logika 1.
7 6 5 4 3 2 1 0
0 0 0 BUSY /ACK PE SELECT /ERROR
Gambar 2.5 bit status
Sebagai kesimpulan, pada port printer, terdapat minimal 12 keluaran; 8 pada port dan 4 pada nibble rendah Control Port. Ada 5 masukan pada 5 bit tertinggi Status Port. Tiga bit keluaran pada control Port dan satu bit masukan pada Status Port dibalik secara hardware, tetapi hal ini dapat ditangani dengan menggunakan fungsi EX-OR untuk memiliki bit-bit yang dipilih.
2.7. Bahasa Pemograman Visual Basic.
Visual Basic merupakan bahasa pemograman yang cukup populer dan mudah untuk dipelajari.Visual Basic juga menyediakan fasilitas yang memungkinkan pemakai menyusun sebuah program dengan memasang objek-objek grafis dalam sebuah grafis dalam sebuah form.
Visual Basic berawal dari bahasa pemograman BASIC (Beginners All Purpose
Symbolic Instruction Code).Karena bahasa basic mudah dipelajari dan populer maka
hampir setiap programmer menguasai bahasa ini.
2.7.1 Memulai Visual Basic
Pada bagian ini akan dijelaskan bagaimana cara menjalankan Visual Basic pada system operasi windows.Cara pertama yang dapat dilakukan untuk memulai Microsoft Visual Basic adalah:
Klik tombol start pada Taskbar,kemudian pilih program dari tampilan menu utama.
2.7.2 Tampilan Awal Visual Basic
Secara otomatis, pada saat pertama kali menjalankan Visual Basic, akan tampil kotak dialog New Project seperti yang terlihat pada ilustrasi gambar.
Gambar 2.6. Tampilan awal Visual Basic
Pada kotak dialog tersebut terdapat tiga pilihan tabulasi dengan keterangan sebagai berikut :
Tabel 2.6. Keterangan Tabulasi Tabulasi Keterangan
New Pilihan ini digunakan untuk membuat project baru dengan berbagai macam pilihan
Existing Pilihan ini digunakan untuk membuka project yang pernah dibuat sebelumnya dengan menetukan folder sekaligus nama file.
Recent Pilihan ini digunakan untuk membuka project yang telah dibuat dan terakhir kali dibuka.
2.8. Close Circuit Television
CCTV (Closed Circuit Television) merupakan sebuah perangkat kamera video digital yang digunakan untuk mengirim sinyal ke layar monitor di suatu ruang atau tempat tertentu. Hal tersebut memiliki tujuan untuk dapat memantau situasi dan kondisi tempat tertentu.
Pada umumnya CCTV seringkali digunakan untuk mengawasi area public. Awalnya gambar dari kamera CCTV hanya dikirim melalui kabel ke sebuah ruang monitor tertentu dan dibutuhkan pengawasan secara langsung oleh operator/petugas keamanan dengan resolusi gambar yang masih rendah. Namun seiring dengan perkembanga teknologi yang sangat pesat seperti saat ini, banyak kamera CCTV yang telah menggunakan sistem teknologi yang modern. Sistem kamera CCTV digital saat ini dapat dioperasikan maupun dikontrol melalui Personal Computer atau Telephone genggam, serta dapat dimonitor dari mana saja dan kapan saja selama ada komunikasi dengan internet maupun akses GPRS.
BAB I
PENDAHULUAN
1.1 Latar Belakang
Kebakaran merupakan salah satu bencana yang sangat sering terjadi dan merupakan kejadian yang sangat tidak kita inginkan. Apabila kebakaran telah terjadi, maka petugas pemadam kebakaran segera melaksanakan tugasnya untuk memadamkan api yang telah membakar bangunan ataupun ruangan. Dalam menjalankan tugasnya, pemadam kebakaran sering dihadapkan pada situasi dan kondisi yang sangat beresiko terhadap keselamatan petugas itu sendiri. Petugas pemadam kebakaran (PMK) harus memasuki ruangan yang dipenuhi oleh api yang harus segera dipadamkan agar tidak menjalar ketempat lain. Sudah tentu hal ini harus dikerjakan oleh PMK dengan cara yang ekstra hati-hati. Untuk itu diperlukan sebuah alat yang dapat membantu tugas mereka agar resiko dalam menjalankan tugas dapat diminimalkan dan alat tersebut dapat membantu dan membuka jalan yang aman bagi petugas PMK untuk memasuki ruangan yang akan dipadamkan.
Dalam kurun waktu yang singkat perkembangan teknologi melaju dengan sangat pesat. Perkembangan teknologi ini merupakan hasil kerja keras dari rasa ingin tahu manusia terhadap suatu hal yang pada akhirnya diharapkan akan mempermudah manusia. Dengan pesatnya laju perkembangan teknologi tersebut banyak bermunculan alat-alat canggih yang dapat bekerja secara otomatis dan salah satunya adalah dibidang robotika.
dahulu sesuai dengan maze. Sudah tentu hal ini sangat merepotkan dan secara teknis robot yang seperti ini belum cocok untuk di terapkan pada kejadian nyata. Untuk itu diperlukan sebuah robot pemadam api yang dapat dikendalikan secara langsung dan dapat mengetahui situasi sekitar sehingga dengan adanya robot ini resiko dalam hal pemadaman api yang dilakukan oleh PMK dapat diminimalkan.
1.2 Batasan Masalah
Untuk membatasi masalah-masalah yang ada, maka penulis membatasi ruang lingkup masalah sebagai berikut :
1. Alat yang dibuat masih berupa prototipe.
2. Robot tidak dilengkapi dengan sensor dinding maupun sensor api karena robot dikendalikan secara langsung.
3. Sistem pemancar dan penerima frekwensi radio pada alat tidak dirancang secara langsung melainkan memodifikasi pemancar yang sudah tersedia di pasaran.
4. Robot hanya dirancang pada medan atau kondisi jalan yang rata, robot belum dapat menaiki tangga.
1.3 Tujuan Penelitian
Adapun tujuan dari penelitian ini adalah:
1. Membuat robot pemadam api sederhana yang dapat dikendalikan secara langsung dan dapat menampilkan kondisi sekitar medan yang akan dilaluinya. 2. Pengembangan lebih lanjut aplikasi mikrokontroller dan PC dibidang
1.4 Manfaat Penelitian
Manfaat yang diharapkan dari penelitian ini adalah
Dengan adanya robot ini diharapkan robot dapat membantu petugas pemadam kebakaran dalam hal pemadaman kebakaran dan mengurangi resiko yang terjadi pada saat proses pemadaman kebakaran karena lokasi rute yang aman untuk dilewati petugas dan keberadaan api dapat dipetakan dengan jelas.
1.5 Sistematika Penulisan
Untuk mempermudah pembahasan dan pemahaman maka penulis membuat sistematika pembahasan bagaimana sebenarnya prinsip kerja dari alat ini sebagai berikut:
Bab I Pendahuluan
Dalam bab ini berisikan mengenai latar belakang, batasan masalah, tujuan penelitian, manfaat penelitian , tempat penelitian, dan sistematika penulisan.
Bab II Tinjauan Pustaka
Bab ini membahas tentang landasan teori yang menjadi acuan dalam pembahasan dan cara kerja rangkaian.
Bab III Perancangan Sistem
Berisi tentang tahap-tahap perancangan sistem, sampai diperoleh suatu diagram blok yang merupakan gambaran dari keseluruhan sistem sehingga dapat menjalankan fungsi yang kita inginkan.
Bab IV Pengujian dan Analisa Sistem
Bab V Kesimpulan dan Saran
ABSTRAK
PROTOTIPE ROBOT PEMADAM API TERKENDALI
Salah satu bencana yang sangat sering terjadi dan tidak diinginkan adalah kebakaran. Dalam menjalankan tugasnya, petugas pemadam kebakaran sering dihadapkan pada situasi dan kondisi yang sangat beresiko terhadap keselamatan petugas itu sendiri. Sebab dalam situasi tertentu petugas pemadam kebakaran harus memasuki bagunan atau ruangan yang sedang terbakar untuk segera memadamkan api agar tidak menjalar ke tempat lain. Untuk itu diperlukan sebuah robot pemadam api yang dapat dikendalikan secara langsung dan dapat memberikan gambaran situasi sekitar sehingga dapat membantu mengurangi resiko keselamatan petugas pemadam kebakaran untuk memasuki ruangan yang akan dipadamkan. Prototipe robot pemadam api ini terdiri dari dua sistem yang terpisah, yaitu sistem robot dan sistem kendali. Agar robot dapat dikendalikan secara jarak jauh digunakan komunikasi wireless. Kamera diletakkan pada sistem robot agar pengendali dapat mengetahui medan yang sedang dilalui oleh robot. Data visual yang ditangkap oleh kamera akan dikirim ke receiver kamera yang terdapat pada sistem kendali dan hasilnya ditampilkan pada monitor. Pada sistem kendali terdapat sebuah PC (Personal Computer) sebagai otak dari keseluruhan sistem. Agar dapat mengirim data secara jarak jauh pada sistem ini dilengkapi dengan transmitter. Input data pengendalian robot dilakukan dengan cara mengklik command-command yang terdapat pada layout program dengan menggunakan mouse.
ABSTRACT
FIRE EXTINGUISHER ROBOT PROTOTYPE IS CONDUCTED
One of the most common disaster that often happen and mostly unwanted is fire . Most firefighters duties, they often face situations and conditions that could risk their own lives .In certain cases, the firefighters had to enter buildings and houses in order to extinguish the fire to prevent it from spreading more. For that matter, it would require a robotical system that could extinguish fire and it could be controlled intentionally and could observe the situation around it, therefore it would help to minimize the risk and would increase the safety of a firefighter.
PROTOTIPE ROBOT PEMADAM API TERKENDALI
SKRIPSI
Diajukan untuk melengkapi tugas dan memenuhi syarat mencapai gelar Sarjana Sains
ERIKSON R 060801052
DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM UNIVERSITAS SUMATERA UTARA
PERSETUJUAN
Judul : PROTOTIPE ROBOT PEMADAM API TERKENDALI Kategori : SKRIPSI
Nama : ERIKSON R
NIM : 060801052
Program Studi : SARJANA (S1) FISIKA Departemen : FISIKA
Fakultas : MATEMATIKA DAN ILMU PENGETAHUAN
ALAM (FMIPA) UNIVERSITAS SUMATERA UTARA
Diluluskan di : Medan, 30 April 2013
Diketahui/disetujui oleh
Ketua Departemen Fisika FMIPA USU Pembimbing
PERNYATAAN
PROTOTIPE ROBOT PEMADAM API TERKENDALI
SKRIPSI
Saya mengakui bahwa skripsi ini adalah hasil kerja saya sendiri, kecuali beberapa kutipan dan ringkasan yang masing-masing disebutkan sumbernya.
Medan, 30 April 2013
PENGHARGAAN
Puji dan syukur penulis panjatkan kepada Tuhan Yang Maha Esa, dengan cinta dan limpah karuniaNya penyelesaian tugas akhir ini dapat diselesaikan dengan waktu yang telah ditetapkan.
Dalam penyelesaian tugas akhir serta penulisan laporannya, penulis mengucapkan banyak terimakasih kepada Bapak Dr. Marhaposan Situmorang selaku dosen pembimbing pada penyelesaian tugas akhir ini. Ucapan terimakasih banyak juga saya sampaikan kepada Dr. Susilawati S.Si, M.Si selaku dosen pembimbing akademik selama penulis mengikuti perkuliahan di Departemen Fisika FMIPA USU. Dan kepada Bapak Dekan FMIPA USU dan Bapak/Ibu Dosen di Departemen Fisika FMIPA USU serta Staf pegawai yang memberi saran, dukungan dan banyak motivasi selama penyelesaian tugas akhir ini. Tidak lupa saya juga mengucapkan terimakasih banyak kepada rekan–rekan seperjuangan Fahri Mahyuzar, Anderson Ginting, Indra gunawan, M.Hakim Nasution, Rahmadani S.Si, S.Pd, Novianti Lasmaria Gaja S.Si, Leo Thamrin Gultom S.Si serta seluruh abang dan adik stambuk saya di IMF dan rekan-rekan penghuni sarmin91, Petrus Kuncoro, Rizal, Elyas, Rio, belps, Jepri, Eko, Alex yang memberikan saya banyak masukan dan bantuan selama perkuliahan dan penyelesaian tugas akhir ini.
Ucapan terimakasih saya yang sangat special kepada Ibunda (Alm) yang sangat saya cintai N Br. Hasibuan dan Ayahanda tercinta St M.Rumahorbo S.Pd, tanpa mereka saya tidak berarti apa-apa. Serta kakak, abang dan adik saya : Insersiana Br Rumahorbo SE, Leroy Rumahorbo SP, Frider rumahorbo SS dan Roberto Rumahorbo yang selalu memberikan bantuan dan dukungan serta selalu mendoakan saya.
ABSTRAK
PROTOTIPE ROBOT PEMADAM API TERKENDALI
Salah satu bencana yang sangat sering terjadi dan tidak diinginkan adalah kebakaran. Dalam menjalankan tugasnya, petugas pemadam kebakaran sering dihadapkan pada situasi dan kondisi yang sangat beresiko terhadap keselamatan petugas itu sendiri. Sebab dalam situasi tertentu petugas pemadam kebakaran harus memasuki bagunan atau ruangan yang sedang terbakar untuk segera memadamkan api agar tidak menjalar ke tempat lain. Untuk itu diperlukan sebuah robot pemadam api yang dapat dikendalikan secara langsung dan dapat memberikan gambaran situasi sekitar sehingga dapat membantu mengurangi resiko keselamatan petugas pemadam kebakaran untuk memasuki ruangan yang akan dipadamkan. Prototipe robot pemadam api ini terdiri dari dua sistem yang terpisah, yaitu sistem robot dan sistem kendali. Agar robot dapat dikendalikan secara jarak jauh digunakan komunikasi wireless. Kamera diletakkan pada sistem robot agar pengendali dapat mengetahui medan yang sedang dilalui oleh robot. Data visual yang ditangkap oleh kamera akan dikirim ke receiver kamera yang terdapat pada sistem kendali dan hasilnya ditampilkan pada monitor. Pada sistem kendali terdapat sebuah PC (Personal Computer) sebagai otak dari keseluruhan sistem. Agar dapat mengirim data secara jarak jauh pada sistem ini dilengkapi dengan transmitter. Input data pengendalian robot dilakukan dengan cara mengklik command-command yang terdapat pada layout program dengan menggunakan mouse.
ABSTRACT
FIRE EXTINGUISHER ROBOT PROTOTYPE IS CONDUCTED
One of the most common disaster that often happen and mostly unwanted is fire . Most firefighters duties, they often face situations and conditions that could risk their own lives .In certain cases, the firefighters had to enter buildings and houses in order to extinguish the fire to prevent it from spreading more. For that matter, it would require a robotical system that could extinguish fire and it could be controlled intentionally and could observe the situation around it, therefore it would help to minimize the risk and would increase the safety of a firefighter.
DAFTAR ISI
2.1.3 SFR (Register Fungsi Khusus) Pada Keluarga 51 7 2.1.4 Gambar IC Mikrokontroler AT89S51 10
2.2 Perangkat Lunak 12
2.2.1 Instruksi – Instruksi AT89S51 12
2.3 Motor DC 15
2.4 Relay 16
2.5 Port Paralel PC 17
2.6 Register-Register Perangkat Lunak 20
2.7 Bahasa Pemograman Visual Basic 22
2.7.1 Memulai Visual Basic 22
2.7.2 Tampilan Awal Visual Basic 23
2.8 Close Circuit Television 24
BAB III PERANCANGAN ALAT DAN PROGRAM
3.1 Blok Diagram Sistem 25
3.2 Rangkaian Mikrokontroler AT89S51 26
3.3 Rangkaian Relay 27
3.4 Perancangan Rangkaian Antar muka Paralel Port 28
3.5 Kamera Wireless 29
3.7 Perancangan Flow Chart (Diagram Alir Program) 32
3.8 Perancangan Program 33
3.8.1 Perancangan Layout Program 38
BAB IV PENGUJIAN ALAT DAN ANALISA PROGRAM
4.1 Pengujian Program 39
4.2 Pengujian Rangkaian minimum mikrokontroler AT89S51 41
4.3 Pengujian Rangkaian Relay 43
BAB V KESIMPULAN DAN SARAN
5.1 Kesimpulan 46
5.2 Saran 46
DAFTAR PUSTAKA 47
DAFTAR TABEL
Halaman
Tabel 2.1 Peta Register Fungsi Khusus-SFR 8
Tabel 2.2 Fungsi Pin pada Port 3 11
Tabel 2.3 Fungsi-Fungsi PIN Port Paralel 18
Tabel 2.4 Alamat Pada Port-Port Paralel 20
Tabel 2.5 Register Perangkat Lunak Pada Port Paralel 21
DAFTAR GAMBAR
Halaman
Gambar 2.1 IC Mikrokontroler AT89S51 10
Gambar 2.2 Simbol Relay dan Rangkaian Driver 17
Gambar 2.3 Port Parlel DB 25 18
Gambar 2.4 Port Parlel Centronix 18
Gambar 2.5 Bit Status 22
Gambar 2.6 Tampilan Awal Visual Basic 23
Gambar 2.7 Tampilan Dasar MS-Visual Basic 23
Gambar 3.1 Blok Diagram 25
Gambar 3.2 Rangkaian Mikrokontroller AT89S51 26
Gambar 3.3 Rangkaian Relay 27
Gambar 3.4 Rangkaian Antar Muka Paralel Port 29
Gambar 3.5 Kamera Wireless 29
Gambar 3.6 Receiver Kamera Wireless 30
Gambar 3.7 TV Tuner 31
Gambar 3.8 Flowchart pada PC 32
Gambar 3.9 Flowchart pada Robot 33
BAB I
PENDAHULUAN
1.1 Latar Belakang
Kebakaran merupakan salah satu bencana yang sangat sering terjadi dan merupakan kejadian yang sangat tidak kita inginkan. Apabila kebakaran telah terjadi, maka petugas pemadam kebakaran segera melaksanakan tugasnya untuk memadamkan api yang telah membakar bangunan ataupun ruangan. Dalam menjalankan tugasnya, pemadam kebakaran sering dihadapkan pada situasi dan kondisi yang sangat beresiko terhadap keselamatan petugas itu sendiri. Petugas pemadam kebakaran (PMK) harus memasuki ruangan yang dipenuhi oleh api yang harus segera dipadamkan agar tidak menjalar ketempat lain. Sudah tentu hal ini harus dikerjakan oleh PMK dengan cara yang ekstra hati-hati. Untuk itu diperlukan sebuah alat yang dapat membantu tugas mereka agar resiko dalam menjalankan tugas dapat diminimalkan dan alat tersebut dapat membantu dan membuka jalan yang aman bagi petugas PMK untuk memasuki ruangan yang akan dipadamkan.
Dalam kurun waktu yang singkat perkembangan teknologi melaju dengan sangat pesat. Perkembangan teknologi ini merupakan hasil kerja keras dari rasa ingin tahu manusia terhadap suatu hal yang pada akhirnya diharapkan akan mempermudah manusia. Dengan pesatnya laju perkembangan teknologi tersebut banyak bermunculan alat-alat canggih yang dapat bekerja secara otomatis dan salah satunya adalah dibidang robotika.
dahulu sesuai dengan maze. Sudah tentu hal ini sangat merepotkan dan secara teknis robot yang seperti ini belum cocok untuk di terapkan pada kejadian nyata. Untuk itu diperlukan sebuah robot pemadam api yang dapat dikendalikan secara langsung dan dapat mengetahui situasi sekitar sehingga dengan adanya robot ini resiko dalam hal pemadaman api yang dilakukan oleh PMK dapat diminimalkan.
1.2 Batasan Masalah
Untuk membatasi masalah-masalah yang ada, maka penulis membatasi ruang lingkup masalah sebagai berikut :
1. Alat yang dibuat masih berupa prototipe.
2. Robot tidak dilengkapi dengan sensor dinding maupun sensor api karena robot dikendalikan secara langsung.
3. Sistem pemancar dan penerima frekwensi radio pada alat tidak dirancang secara langsung melainkan memodifikasi pemancar yang sudah tersedia di pasaran.
4. Robot hanya dirancang pada medan atau kondisi jalan yang rata, robot belum dapat menaiki tangga.
1.3 Tujuan Penelitian
Adapun tujuan dari penelitian ini adalah:
1. Membuat robot pemadam api sederhana yang dapat dikendalikan secara langsung dan dapat menampilkan kondisi sekitar medan yang akan dilaluinya. 2. Pengembangan lebih lanjut aplikasi mikrokontroller dan PC dibidang
1.4 Manfaat Penelitian
Manfaat yang diharapkan dari penelitian ini adalah
Dengan adanya robot ini diharapkan robot dapat membantu petugas pemadam kebakaran dalam hal pemadaman kebakaran dan mengurangi resiko yang terjadi pada saat proses pemadaman kebakaran karena lokasi rute yang aman untuk dilewati petugas dan keberadaan api dapat dipetakan dengan jelas.
1.5 Sistematika Penulisan
Untuk mempermudah pembahasan dan pemahaman maka penulis membuat sistematika pembahasan bagaimana sebenarnya prinsip kerja dari alat ini sebagai berikut:
Bab I Pendahuluan
Dalam bab ini berisikan mengenai latar belakang, batasan masalah, tujuan penelitian, manfaat penelitian , tempat penelitian, dan sistematika penulisan.
Bab II Tinjauan Pustaka
Bab ini membahas tentang landasan teori yang menjadi acuan dalam pembahasan dan cara kerja rangkaian.
Bab III Perancangan Sistem
Berisi tentang tahap-tahap perancangan sistem, sampai diperoleh suatu diagram blok yang merupakan gambaran dari keseluruhan sistem sehingga dapat menjalankan fungsi yang kita inginkan.
Bab IV Pengujian dan Analisa Sistem
Bab V Kesimpulan dan Saran