8
LANDASAN TEORI
2.1. Penelitian Terkait
Untuk mendukung penulisan tugas akhir ini, penulis mencari berbagai sumber referensi dari berbagai sumber terutama jurnal penelitian yang berkaitan dengan penelitian yang penulis lakukan dalam Penerapan Peternakan Cerdas Pada Ayam untuk Makanan dan Minuman Berbasis Internet of Things. Beberapa penelitian
yang telah dilakukan dari kalangan akademisi di Indonesia menjadi dasar penulis melakukan penelitian ini selain penulis melakukan pencarian sumber informasi melalui wawancara langsung terhadap peternak serta melalui buku-buku dan sumber lain yang berkaitan dengan peternakan ayam maupun internet of things.
Penelitian dengan judul “Iot : Kendali Dan Otomatisasi Si Parmin ( Studi Kasus Peternak Desa Galih Lunik Lampung Selatan )” dijelaskan Kegiatan pemberian pakan, air, dan vitamin yang dilakukan secara manual tersebut bagi peternak ayam akan menyita waktu dan tenaga serta terkadang peternak lupa untuk memberi pakan dan air pada ayam, hal tersebut dapat berdampak negatif untuk hasil ternak yang didapat. Jika peternak lupa memberi pakan maka akan berdampak pada perkembangan bobot ayam, sedangkan jika lupa memberi air maka dapat mengakibatkan stres yang berujung kematian pada ayam. (S et al., 2018).
Penelitian dengan judul “Smart Kandang Ayam Petelur Berbasis Internet of Things untuk Mendukung SDGS 2030 (Sustainable Development Goals)” membahas
tentang inovasi dalam peternakan ayam petelur. Untuk membantu terwujudnya SDG‟s dalam penyediaan pangan sumber protein hewani asal ternak maka dibuatlah sebuah inovasi baru di bidang peternakan ayam petelur untuk membantu peningkatan produktifitas hasil peternakan yang lebih baik. Oleh karena itu, Penulis merancang sebuah kandang cerdas dengan teknologi Internet of Things yang dapat membantu peternak dan mampu membantu melakukan perbaikan dan inovasi kandang yang lebih baik untuk mempertahankan dan meningkatkan produktifitas telur pada peternakan di Indonesia. kandang ini memiliki kelebihan yaitu mampu memberikan makan secara otomatis, mengontrol volume air minum, mengontrol suhu kandang, kelembapan kandang dan melakukan penyemprotan desinfeksi secara otomatis dengan menggunakan smartphone. (Umam, 2018).
Penelitian dengan judul “Rancang Bangun Pemantauan Pakan Ayam Otomatis Berbasis Internet Of Things ( IOT )” melakukan perancangan monitoring pakan ayam otomatis menggunakan smartphone android dengan konektivitas menggunakan wifi module yang sudah tertanam pada NodeMCU yang dapat memantau pakan dari jarak jauh. Dengan cara mengkoneksikan wifi module ke smartphone android bisa membantu para peternak ayam tersebut melakukan pemantauan menggunakan smartphone dari mana saja karena mempunyai jarak jangkauan yang lebih jauh dikarenakan sudah terhubung ke server internet dimana server itu berfungsi sebagai penyimpanan data dari smartphone secara realtime. Penelitian ini bertujuan agar mempermudah kinerja para peternak ayam untuk memantau pakan ayam didalam kandang ketika telah habis. (Pradana & Sari, 2019).
Penelitian dengan judul “Implementasi Alat Pemberi Pakan Ternak Menggunakan Iot Untuk Otomatisasi Pemberian Pakan Ternak” terbatas hanya pada
pemberian pakan dan menggunakan website sebagai media internet of things. Pada penelitian ini disimpulkan dengan diterapkannya teknologi otomatisasi pada pemberi pakan ternak yang dapat melakukan pengontrolan. Adanya IoT yang dapat mengambil hasil monitoring pakan ternak dari sensor kemudian data tersebut dikirimkan ke server.
Data hasil monitoring yang sudah terkirim ke server kemudian ditampilkan di website sebagai informasi. Sehingga peternak sudah tidak perlu lagi melakukan pengontrolan secara manual. yang bisa dilakukan dari jarak jauh dengan mengunakan bantuan jaringan internet. (Ariani et al., 2019).
Penelitian dengan judul “Pemberian Pakan Ayam Otomatis Dan Presisi Berbasis Web” membahas tentang bagaimana cara memberikan pakan secara presisi yang dikontrol otomatis sesuai dengan kebutuhan ternak dan dapat dipantau melalui web. Hipotesis penelitian ini adalah jika pemberian pakan di kontrol secara tepat, maka penggunaan pakan akan menjadi efisien dan keuntungan peternak akan meningkat.
Selanjutnya, jika pengontrolan pakan dapat di pantau melalui web, maka peternak tidak harus terus menerus berada di lokasi peternakan, tetapi dapat melakukan aktivitas lain tanpa mengabaikan pengelolaan peternakan. (Kurnia & Widiasih, 2019).
2.2. Perangkat Keras
Menurut (Susilawati & Darmawan, 2017) menyimpulkan bahwa: Hardware atau perangkat keras adalah segala piranti atau komponen dari sebuah rangkaian elektronika yang sifatnya bisa dilihat secara kasat mata dan bisa diraba secara langsung. Hardware berfungsi untuk mendukung segala proses dalam sebuah rangkaian elektronika dan bekerja sesuai perintah yang sudah ditentukan penggunanya. Dengan adanya komponen hardware, maka bentuk output dari setiap proses bisa direalisasikan.
Pada bagian ini, penulis akan menjelaskan perangkat keras yang digunakan penulis dalam pembuatan alat. Perangkat keras yang penulis gunakan adalah Lolin D1 Mini Pro v.2.0.0, RTC, Motor Servo, Relay, Sensor Ultrasonik.
2.2.1. Teori IC Digital
Menurut (Maulana & Rachmat Adi Purnama, 2017) mengatakan bahwa
“Integrated Circuit (IC) adalah “Sirkuit terintegrasi atau yang biasa juga disebut sebagai IC merupakan komponen elektronika yang terbuat dari kumpulan puluhan, ratusan, hingga ribuan transistor, resistor, dioda dan komponen elektronika lainnya”.
IC Digital bisa diprogram untuk melakukan tugas khusus. Dalam sebuah IC terdapat jutaan flip-flop, gerbang logika dan lainnya yang bekerja dengan matematika biner dengan 0 berarti OFF dan 1 berarti ON. Pada operasi biner tersebut IC digital akan menghasilkan tegangan 0 volt (low) dan 5 volt (high). IC digital tersusun dari beberapa rangkaian logika AND, OR, NOT, NAND, NOR, dan XOR.
2.2.2. Sumber Tegangan
Sumber tegangan atau catu daya berfungsi untuk memberikan arus listrik pada perangkat. Catu daya sebagai sumber tenaga dapat berasal dari : baterai, accu, solar cell dan adaptor. Komponen ini akan mencatu tegangan sesuai dengan tegangan yang diperlukan oleh rangkaian eletronika.
Pada board Lolin D1 Mini Pro, terdapat port baterai sehingga seperti perangkat yang jamak saat ini. Pengisian ulang baterai bisa dilakukan melalui port yang sama dengan port data. Kelebihan ini menjadi salah satu alasan penulis menggunakan board Lolin D1 Mini Pro v.2.0.0.
2.2.3. Komponen Elektronika
Penggunaan board Lolin D1 Mini Pro v.2.0.0 meminimalkan penggunaan komponen tambahan pada perancangan sistem ini. Penulis menggunakan kabel jumper untuk menghubungkan perangkat mikrokontroler dengan shield yang digunakan penulis untuk mendukung pembuatan sistem ini.
2.2.4. Sensor
Pada pembuatan sistem peternakan cerdas ini penulis menggunakan beberapa sensor sebagai berikut :
2.2.4.1 Sensor Ultrasonik HC-SR04
Gelombang ultrasonik merupakan gelombang yang umum digunakan untuk radar untuk mendeteksi keberadaan suatu benda dengan memperkirakan jarak antara sensor dan benda tersebut. sensor jarak yang umum digunakan dalam penggunaan untuk mendeteksi jarak yaitu sensor ultrasonik. pengertian sensor ultrasonik adalah sebuah sensor yang berfungsi untuk mengubah besaran fisis (bunyi) menjadi besaran listrik dan sebaliknya.
Penulis memanfaatkan sensor ini untuk mendeteksi volume pakan pada cadangan. Sehingga bisa dilakukan monitoring dan melaporkan jumlah pakan melalui internet.
Gambar II.1
Sensor Ultrasonik HC-SR04 2.2.6. Relay.
Relay adalah Saklar (Switch) yang dioperasikan secara listrik dan merupakan komponen Electromechanical (Elektromekanikal) yang terdiri dari 2 bagian utama yakni Elektromagnet (Coil) dan Mekanikal (seperangkat Kontak Saklar/Switch).
Relay menggunakan Prinsip Elektromagnetik untuk menggerakkan Kontak Saklar sehingga dengan arus listrik yang kecil (low power) dapat menghantarkan listrik yang bertegangan lebih tinggi.
Gambar II.2 Relay
2.2.7. Aplikasi Telegram
Telegram adalah salah satu aplikasi chatting terenkripsi yang dikenal sangat aman dan canggih. Fitur keamanan yang mumpuni serta didukung dengan berbagai tools dan fitur canggih membuat Telegram menjadi semakin digemari.
Telegram bot adalah sebuah bot atau robot yang diprogram dengan berbagai perintah untuk menjalankan serangkaian instruksi yang diberikan oleh pengguna. Bot ini hanyalah sebuah akun Telegram yang dioperasikan oleh perangkat lunak yang memiliki fitur AI.
Dalam mewujudkan konsep internet of things, diperlukan infrastruktur yang memadai untuk mendukung proses monitoring dan pengendalian. Lalu-lintas data secara realtime membutuhkan dukungan server yang memadai, sedangkan untuk memenuhi itu membutuhkan biaya yang cukup besar. Karena penggunaan shared hosting melarang penggunaan data secara realtime. Oleh karena itu penulis menggunakan fitur Bot yang tersedia secara gratis dan aman yang disediakan oleh Aplikasi Telegram, sehingga penerapan perternakan cerdas yang penulis bangun tidak memerlukan biaya yang besar yang malah memberatkan bagi peternak.
2.2.8. Mikrokontroler
Menurut (Sujarwata, 2018) mengatakan bahwa “Mikrokontroler adalah suatu alat elektronika digital yang mempunyai masukan dan keluaran (I/O) serta pengendali (kontrol) dengan suatu program yang dapat ditulis dan dihapus dengan cara khusus”.
Mikrokontroler berfungsi sebagai pengontrol rangkaian elektronika dan pada umumnya dapat menyimpan program yang pada dasarnya menggunakan bahasa
assembler. Saat ini mikrokontroler dapat diprogram dengan menggunakan bahasa tingkat tinggi seperti BASIC, PASCAL atau C. Agar semua mikrokontroler dapat berfungsi, maka mikrokontroler tersebut memerlukan komponen eksternal yang kemudian disebut dengan system minimum. Untuk membuat sistem minimal paling tidak dibutuhkan sistem clock dan reset, walaupun pada beberapa mikrokontroler sudah menyediakan sistem clock internal, sehingga tanpa rangakaian eksternal pun mikrokontroler sudah beroperasi. Mikrokontroler berbeda dari mikroprosesor serba guna yang digunakan dalam sebuah personal computer (PC), karena sebuah mikrokontroler pada umumnya telah berisi komponen pendukung sistem minimal mikroprosesor, yakni memori dan antarmuka I/O. Mikrokontroler cenderung beroperasi pada manipulasi bit, sedangkan mikroprosesor cenderung beroperasi pada operasi byte (8bit).
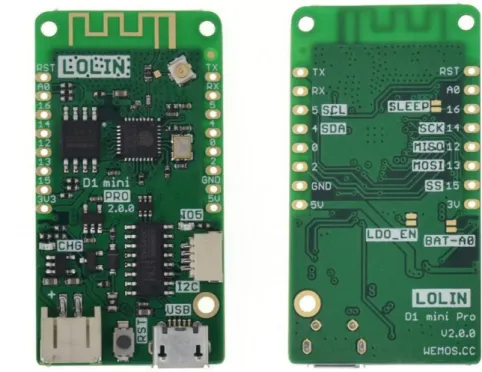
Pada penyusunan tugas akhir ini, penulis menggunakan Board Lolin D1 Mini Pro v2.0.0 yang berbasiskan ESP8266 yang memiliki onboard wifi shield untuk mendukung internet of things sebagaimana yang penulis usung.
Sumber : https://docs.wemos.cc/
Gambar II.3 Lolin D1 Mini Pro v2.0.0
Lolin D1 Mini Pro v.2.0.0 merupakan produk Wemos yang diluncurkan pada tahun 2018.
Dilansir dari situs resminya https://docs.wemos.cc/ Lolin D1 Mini Pro v.2.0.0 merupakan board mini dengan 16 MB Flash, konektor antenna eksternal dan antena keramik bawaan yang berbasiskan ESP8266.
Fitur-fitur yang tersedia pada Lolin D1 Mini Pro v2.0.0 adalah :
1. 11 Pin digital input/output
2. Interrupt/pwm/I2C/one-wire
3. 1 input analog(input maksimal 3.2V )
4. 16M bytes(128M bit) Flash
5. Konektor antena eksternal
6. Antena PCB bawaan
7. Antarmuka baterai lithium, dengan arus isi ulang 500 mAh
8. LOLIN I2C Port
9. Kompatibel dengan Lolin D1 Mini v2.0.0, MicroPython, NodeMCU
10. Firmware asli : MicroPython terbaru
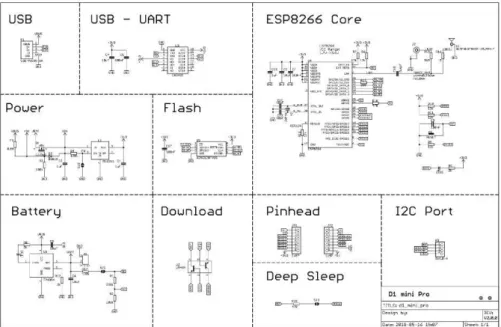
Sumber : https://docs.wemos.cc/
Gambar II.4
Skema Lolin D1 Mini Pro v2.0.0
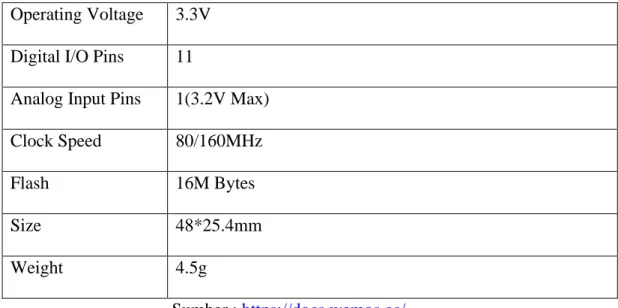
Tabel II.1.
Tabel Spesifikasi Teknik Lolin D1 Mini Pro v2.0.0
Operating Voltage 3.3V Digital I/O Pins 11
Analog Input Pins 1(3.2V Max) Clock Speed 80/160MHz
Flash 16M Bytes
Size 48*25.4mm
Weight 4.5g
Sumber : https://docs.wemos.cc/
Tabel II.2
Tabel Spesifikasi Teknik Lolin D1 Mini Pro v2.0.0
Pin Function ESP-8266 Pin
TX TXD TXD
RX RXD RXD
A0 Analog input, max 3.2V A0
D0 IO GPIO16
D1 IO, SCL GPIO5
D2 IO, SDA GPIO4
D3 IO, 10k Pull-up GPIO0
D4 IO, 10k Pull-up, BUILTIN_LED GPIO2
D5 IO, SCK GPIO14
D6 IO, MISO GPIO12
D7 IO, MOSI GPIO13 D8 IO, 10k Pull-down, SS GPIO15
G Ground GND
5V 5V -
3V3 3.3V 3.3V
RST Reset RST
Sumber : https://docs.wemos.cc/
2.3 Perangkat Lunak
Menurut (Utami, 2015) mengatakan bahwa “Perangkat lunak (software) adalah program yang berisi kumpulan instruksi untuk melakukan proses pengolahan data”.
Perangkat lunak atau software yang digunakan dalam Penerapan Peternakan Cerdas Pada Ayam untuk Makanan dan Minuman Berbasis Internet of Things adalah Software Telegram pada sisi pengguna serta untuk sisi pemrograman mikrokontroler menggunakan Lolin D1 Mini v2.0.0 IDE (Integrated Development Environtment) yang menggunakan bahasa C.
2.3.1. Bahasa Pemprograman
Menurut (Iswanto et al., 2009) menyimpulkan bahwa: Bahasa C pertama kali digunakan di komputer Digital Equipment Cor- poration PDP-11 yang menggunakan sistem operasi UNIX C adalah bahasa yang standar, artinya suatu program yang ditulis dengan bahasa C tertentu akan dapat dikonversi dengan bahasa C yang lain dengan sedikit modifikasi, Standar bahasa C yang asli adalah standar dari UNIX. Berikut ini adalah fungsi-fungsi dari bahasa C :
1. Struktur
Struktur dalam penulisan program bahasa C mencakup tiga hal yaitu File Header, Fungsi Utama, Fungsi Lain. Pemrograman bahasa C biasa menggunakan fungsi utama Main() yang akan dijalankan pertama kali pada saat eksekusi program, meskipun didalam fungsi utama ini terdapat statement yang memanggil fungsi lain.
Sedangkan didalam program Lolin D1 Mini v2.0.0 (Sketch) memiliki dua fungsi yang diperlukan yang setiap fungsinya melampirkan blok-blok pernyataan.
void setup()
{
statements;
}
void loop()
{
statements;
}
1. Void setup() { }
Fungsi setup() akan dipanggil ketika sketch dijalankan pertama kali dan hanya akan berjalan sekali, yaitu setiap power-up atau restart board Lolin D1 Mini v2.0.0. Struktur fungsi ini untuk menginisialisasi mode pin, variabel, memulai penggunaan library, dan lain-lain.
2. Void Loop() { }
Setelah fungsi setup() selesai, fungsi loop() akan dijalankan secara terus menerus sampai catu daya (power supply) dilepas. Fungsi ini secara aktif mengontrol board Lolin D1 Mini v2.0.0 baik secara input maupun output.
2. Further Syntax
a. ; (titik koma) digunakan pada akhir setiap baris kode.
b. {} (kurung kurawal) untuk mendefinisikan awal fungsi dan akhir fungsi.
c. // (baris komentar) digunakan untuk memberi satu baris catatan dari arti kode- kode yang dituliskan.
d. /**/ (blok komentar) digunakan untuk memberi dua atau lebih baris catatan dari arti kode-kode yang dituliskan.
e. #include yaitu satu jenis pengarah praprosessor yang dipakai untuk membaca file yang dinamakan file judul (header file).
3. Variabel
Variabel adalah cara penamaan dan menyimpan nilai numerik yang nantinya digunakan oleh program. Sebuah variabel perlu dinyatakan dan diberikan secara opsional ke nilai yang perlu disimpan. int inputVariable.
= 0; // menjelaskan sebuah variabel dan memberi nilai 0 inputVariable = analogRead(2); // menetapkan variabel ke nilai pin analog 2 input Variable adalah variabel itu sendiri.
4. Tipe Data
a. Char : Memiliki ukuran memori 1 Byte dengan jangkauan nilai -128 s/d 127 dan menyimpan 1 karakter menggunakan kode ASCII.
b. Byte : Menyimpan nilai numerik 8-bit tanpa titik desimal dan memiliki jangkauan nilai 0-255.
c. Int : Menyimpan bilangan tanpa titik desimal dan memiliki ukuran memori 2 Byte(16-bit) dengan jangkauan nilai -32,768 s/d 32,767.
d. Long : Tipe data extended untuk bilangan long integer dan memiliki ukuran memori 4 Byte dengan jangkauan nilai -2,147,435,648 s/d 2,147,435,647.
e. Float : Tipe data untuk angka yang memiliki titik desimal dan memiliki ukuran memori 4 Byte dengan jangkauan nilai -3.4028235E+38 s/d 3.4028235E+38.
f. Double : Memiliki ukuran memori 8 Byte dengan jangkauan nilai - 1,7x10^(- 308) s/d 1,7x10(+308).
g. Boolean : Digunakan untuk menyimpan nilai TRUE (benar) atau FALSE (salah) dan hanya menggunakan 1 bit dari RAM.
5. Array
Adalah tipe terstruktur yang terdiri dari sejumlah komponen-komponen yang mempunyai tipe yang sama. Banyaknya komponen dalam array ditunjuk oleh suatu indeks untuk membedakan antar variabel.
Format: TipeData NamaVariabel [ukuran]
a. Type data, untuk menyatakan type data yang digunakan.
b. Nama variabel, untuk menyatakan nama variabel yang digunakan.
c. Ukuran, untuk menyatakan jumlah maksimum elemen array.
Contoh: Float Jumlah[8]
6. Operator
Merupakan simbol atau kata yang digunakan dalam program untuk melakukan suatu operasi atau manipulasi, seperti menjumlahkan dua buah nilai, memberikan nilai suatu variabel, membandingkan dua buah nilai, dan lain-lain. Berikut ini operator- operator yang biasa digunakan dalam bahasa C, yaitu:
1. Operator Aritmatika
Operator ini digunakan untuk memanipulasi angka yang bekerja seperti matematika sederhana. Operator Aritmatika digolongkan dalam Operator binary dan operator unary.
Tabel II.3 Tabel Operator Binary
Operator Keterangan Contoh
+ Penjumlahan 4 + 5
- Pengurangan 3 – 1
* Perkalian 4 * 2
/ Pembagian 8 / 4
% Sisa Pembagian (mod) 5 % 2
Sumber : www.duniailkom.com Tabel II.4
Tabel Operator unary
Operator Keterangan Contoh
+ Tanda Plus +5
- Tanda Minus -5
Sumber : www.duniailkom.com
2. Operator Relasi / Perbandingan
Operator ini digunakan untuk membandingkan dua buah nilai dengan hasil berupa nilai numerik 1 (True) atau 0 (False).
Tabel II.4 Tabel Operator Relasi
Operator Keterangan
== Sama dengan (bukan pemberi nilai)
!= Tidak Sama dengan
> Lebih dari
< Kurang dari
>= Lebih dari atau Sama dengan
<= Kurang dari atau Sama dengan Sumber : www.duniailkom.com
c. Operator Logika / Boolean
Digunakan untuk mengekspresikan satu atau lebih data atau ekspresi logika (boolean) dengan menghasilkan data logika (boolean) baru.
Tabel II.7 Tabel Operator Logika
Operator Keterangan
&& Operator Logika AND
|| Operator Logika OR
! Operator Logika NOT
Sumber : www.duniailkom.com
Operator Logika AND digunakan untuk menghubungkan dua atau lebih ekspresi relasi, akan bernilai benar jika semua ekspresi relasi yang dihubungkan bernilai benar. Operator Logika OR digunakan untuk menghubungkan dua atau lebih ekspresi relasi, akan bernilai benar jika salah satu ekspresi relasi yang dihubungkan bernilai benar dan akan bernilai salah jika semua ekspresi relasi yang dihubungkan bernilai salah. Operator Logika NOT akan memberikan nilai kebalikan dari ekspresi yang dihubungkan, jika ekspresi bernilai benar maka akan menghasilkan nilai salah, begitu dengan sebaliknya.
7. Konstanta
Adalah nilai yang telah ditentukan yang digunakan untuk membuat program lebih mudah dibaca. Konstanta dikelompokkan menjadi sebagai berikut:
a. TRUE/FALSE
Adalah konstanta boolean yang mendefinisikan level logika.
FALSE didefinisikan sebagai 0 (nol), sedangkan TRUE didefinisikan sebagai 1 (satu).
If (b == TRUE);
{ pernyataan; }
b. HIGH/LOW
Konstanta ini menentukan level tinggi atau rendah dan digunakan saat membaca atau menulis ke pin digital. HIGH didefinisikan sebagai logika 1, on, atau 5 volt. Sedangkan LOW didefinisikan sebagai logika 0, off, atau 0 volt.
digitalwrite(13, HIGH);
c. INPUT/OUTPUT
Konstanta ini digunakan dengan fungsi pinMode() untuk menentukan mode pin digital sebagau input atau output.
pinMode(13, OUTPUT);
8. Struktur Pengaturan
Sebuah program mempunyai suatu struktur dan pengaturan untuk menjalankan perintah programnya, yang biasa disebut juga dengan seleksi kondisi. Beberapa seleksi kondisi yang biasa digunakan dalam bahasa C sebagai berikut:
a. Perintah If
Digunakan untuk memilih satu dari dua atau lebih pernyataan. Format: if (kondisi)
{ pernyataan }
b. Perintah If...Else
Digunakan untuk memilih satu dari dua atau lebih pernyataan dengan menjalankan pernyataan if terlebih dahulu, jika kondisinya TRUE
maka akan diteruskan perintah programnya, jika kondisinya FALSE
maka pernyataan else yang akan dijalankan. Format: if (kondisi) { Pernyataan }
Else { pernyataan }
3. Perintah If dalam If
Perintah if dalam if sering disebut nasted-if , dengan menjalankan kondisi1 if terlebih dahulu kemudian meneruskannya ke kondisi2 if yang jika pernyataan1 benar/TRUE maka diteruskan perintah programnya, jika kondisinya FALSE maka pernyataan2 yang akan dijalankan.
Format: if (kondisi1)
{ if (kondisi2) { pernyataan1 } Else { pernyataan2 } }
4. Perintah For
Digunakan untuk melakukan perulangan pada suatu kondisi menggunakan perhitungan (counter) yang pasti.
Format: for (inisialisasi; syarat perulangan; pengubah nilai pencacah)
{ pernyataan; }
Inisialisasi merupakan bagian untuk memberikan nilai awal untuk variabel-variabel tertentu. Syarat Perulangan yaitu memegang kontrol terhadap perulangan, karena bagian ini yang akan menentukan suatu perulangan diteruskan atau dihentikan. Pengubah Nilai Pencacah; mengatur kenaikan atau penurunan nilai pencacah.
9. Delay(time)
Fungsi ini untuk menghentikan sementara program selama waktu yang ditentukan dalam milidetik. 1000 sama dengan 1 detik
Delay(1000); //tunggu 1 detik
2.3.2. Software Editor
2.3.2.1. Arduino IDE
Menurut (Ananda, 2018) mengatakan bahwa “Arduino IDE (Integrated Development Program) merupakan software yang dipakai untuk membuat sketch yang akan di upload ke board arduino sendiri”.
Arduino IDE juga tergolong bentuk software pengembang program yang terintegrasi sehingga berbagai tools atau tampilan disediakan dan dinyatakan dalam bentuk antarmuka berbasis menu. Dengan menggunakan Arduino IDE, kesalahan penulisan sketch atau kebenaran penulisan sketch langsung dapat dibuktikan.
Gambar II.5
Tampilan Pembuka Arduino IDE
1. Bagian-bagian Arduino IDE
Berikut adalah fungsi toolbar yang terdapat pada Arduino IDE :
Verify : Berfungsi untuk melakukan checking kode yang dibuat pada kesalahan kompilasi.
Upload : Berfungsi untuk melakukan kompilasi program dan menguploadnya ke Board yang sudah dikonfigurasi.
New : Berfungsi untuk membuat sketch baru.
Open : Berfungsi untuk membuka sketch yang sudah pernah disimpan.
Save : Berfungsi untuk menyimpan sketch yang telah dibuat.
Serial Monitor : Berfungsi untuk membuka serial monitor. Serial monitor merupakan jendela yang menampilkan data apa saja yang dikirimkan atau dipertukarkan antara arduino dengan sketch pada port serialnya. Serial monitor ini dapat digunakan untuk menampilkan nilai proses,nilai pembacaan, dan pesan error.
Perintah lain bisa diakses melalui menu : File, Edit, Sketch, Tool, Help
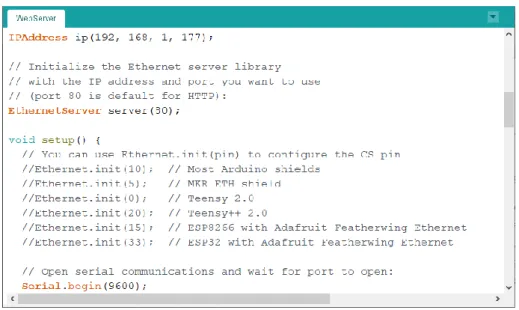
2. Sketch
Bagian ini merupakan fungsi utama pada software IDE, dimana programmer bisa menuliskan listing kode disini untuk diperintahkan ke board mikrokontroler yang diinginkan.
Gambar II.6 Bagian sketch 3. Message Board
Pada bagian ini programmer bisa mendapatkan info error maupun berhasil dalam proses yang dieksekusi oleh programmer.
Gambar II.7 Bagian Konsol
4. Menambahkan Board Lolin D1 Mini Pro v.2.0.0 pada Arduino IDE
Secara default board berbasis ESP8266 tidak tersedia pada pilihan tool ->
board. Kita diharuskan menambahkan sendiri board yang kita gunakan ke Arduino IDE.
a. Pada Arduino IDE masuk ke menu File, terus pilih Preferences.
Sumber : https://www.kelasrobot.com Gambar II.8
Pilih Preferences
b. Kemudian pada Additional Board Manager URLs:, masukan link : http://arduino.esp8266.com/stable/package_esp8266com_index.json c. klik OK
Sumber : https://www.kelasrobot.com Gambar II.9
Tambahkan board
d. Lalu ke menu Tools, klik Board, lalu klik Boards Manager…
Sumber : https://www.kelasrobot.com Gambar II.10
Pilih board
e. di Filter your search… atau dikolom pencarian masukan esp, klik esp8266 by ESP8266 Community, klik Install.
Sumber : https://www.kelasrobot.com Gambar II.11
Install board
f. Tunggu sampai proses Install selesai, lalu tekan Close.