Diajukan Sebagai Salah Satu Syarat
Memperoleh Gelar Sarjana Teknik
Jurusan Teknik Elektro
Disusun oleh :
INDRA BAGUS KURNIAWAN
NIM : 015114034
PROGRAM STUDI TEKNIK ELEKTRO
JURUSAN TEKNIK ELEKTRO
FAKULTAS TEKNIK
UNIVERSITAS SANATA DHARMA
YOGYAKARTA
IDENTIFICATION SYSTEM OF TRAIN’S POSITION
THE FINAL PROJECT
Presented as Partial Fulfillment of the Requirements
to Obtain the
Sarjana Teknik
Degree
in Electrical Engineering
Arranged by :
INDRA BAGUS KURNIAWAN
STUDENT NUMBER: 015114034
ELECTRICAL ENGINEERING STUDY PROGRAM
ELECTRICAL ENGINERING DEPARTMENT
ENGINEERING FACULTY
SANATA DHARMA UNIVERSITY
YOGYAKARTA
2007
Dengan ini saya menyatakan bahwa dalam Tugas Akhir ini tidak terdapat karya
yang pernah diajukan untuk memperoleh gelar kesarjanaan di suatu Perguruan
Tinggi, dan sepanjang pengetahuan saya juga tidak terdapat karya atau pendapat
yang pernah ditulis atau diterbitkan oleh orang lain, kecuali yang secara tertulis
diacu dalam naskah ini dan disebutkan dalam daftar pustaka.
Yogyakarta, Januari 2007
Penulis
MOTTO DAN PERSEMBAHAN
MOTTO
1.
Jangan pernah menyerah dalam menghadapi hidup, karena Tuhan selalu
membantu melalui orang-orang di sekitarmu.
2.
Hidup hanya sekali, jalani dengan optimis!!!!!
PERSEMBAHAN
Kupersembahkan Tugas Akhir ini Kpada ALLAH BAPA di Surga
untuk kedua orang tuaku tercinta Bapak Suradi dan Ibu Sukowatin, kakakku
satu-satunya yang kusayangi Mbak Pipit dan suaminya Mas Agus serta ponakanku Dea yang
lucu dan imut
Kupersembahkan pula untuk
“kegelapan mutlak”
yang membuatku takut akan
ALLAH BAPA
kecelakaan.
Pada penelitian tugas akhir ini dirancang suatu sistem identifikasi
keberadaan kereta api untuk mengetahui keberadaan suatu kereta api oleh setiap
stasiun yang akan dilalui. Perancangan ini menggunakan mikrokontroler
AT89S51 sebagai pusat kendali. Setiap kereta api dilengkapi dengan identitas
berupa kombinasi nyala
infra red
. Identitas kereta api diterima oleh sensor berupa
fototransistor
yang ada di setiap stasiun. Posisi kereta api diketahui dengan
adanya
optocoupler
setiap stasiun kereta api. Identitas dan posisi kereta api akan
diolah oleh mikrokontroler yang kemudian ditampilkan pada penampil serta
dikirimkan ke stasiun lain, sehingga setiap stasiun dapat mengetahui posisi dari
suatu kereta api.
Tugas akhir ini telah berhasil dibuat dengan mensimulasikan 2 buah kereta
api miniatur dan 3 stasiun kereta api dengan tingkat kesalahan relatif rendah.
Sistem ini masih mungkin dikembangkan untuk mencapai hasil yang maksimal
dengan tingkat kesalahan yang minimum.
ABSTRACT
Nowadays the train accident is often happened in Indonesia. It not only
caused casualty but also financial loss. Therefore, the train traffic control need to
be increased in order to minimize the accidents.
In this study, a train existence identification system is designed to detect
the train position in each station which will be passed by a train. This scheme used
AT89S51 microcontroller as a central control. Each train is equipped with identity
in the form of infra red combination. This train identity is read by a
phototransistor as a censor in every train station. The train position will be
detected by optocoupler in each train station. First, the train identity and the
position will be processed by microcontroller. Second, it will be displayed on the
display. Third, it will be delivered to other stations, so that each station will detect
a train position.
This final project has succeeded to simulate 2 train miniatures and 3 train
stations with low error. There is a probability to develop this system to reach a
maximum result with minimum mistake.
Dengan menyebut nama ALLAH BAPA di Surga yang maha pengasih dan
penyayang, penulis mengucapkan puji syukur atas berkat, rahmat dan
anugerah-Nya, sehingga alat sistem identifikasi keberadaan kereta api ini akhirnya dapat
diselesaikan dengan hasil yang memuaskan.
Dengan selesainya tugas akhir ini yang merupakan salah satu syarat untuk
meraih gelar sarjana pada jurusan Teknik Elektro, Fakultas Teknik, Universitas
Sanata Dharma, Yogyakarta, penulis mengucapkan terima kasih kepada:
1.
Kedua orang tuaku tercinta Bapak Suradi dan Ibu Sukowatin, atas
segalanya yang telah diberikan, dan dikorbankan yang tak akan pernah
dapat ternilai harganya.
2.
Bapak Ir. Iswanjono, M.T selaku pembimbing, atas segala pemikiran
dan bimbingannya dari awal hingga akhir pembuatan tugas ahir ini.
3.
Kakakku Mbak Pipit dan suaminya Mas Agus atas motivasinya serta
ponakanku Dea yang lucu.
4.
Teman-teman seperjuangan Tonny Pujianto atas semua bantuan dalam
menyelesaikan semuanya, Andreas Rony Marlino atas dukungan
tenaga dan moral, Utomo atas pinjaman
laptop
-nya, Yoga atas
DST-51
-nya, Pinto yang sama-sama berjuang menyelesaikan TA-nya,
KhokhonyaNesti dan Rikhard juga Don atas peralatan yang
dipinjamkan.
5.
Teman–teman Teknik Elektro 2001 selamat berjuang dalam dunia
nyata untuk yang sudah lulus dan cepat lulus untuk yang belum.
6.
teman kost Onest, Angga, dan penghuni yang lain.
Teman-teman yang sudah pindah dari kost David, Edy, Dwi, Eric, Bayu.
7.
Teman-teman “Tumindak Ngiwo” Ganyong, Kopet, Zigot, Barjo, Neri,
Misil, Windra, dan semua anak TN yang baru.
8.
Teman-teman wanitaku yang selalu memberi semangat Novi “Tetaplah
Jadi Bintang di Langit” kenapa kamu dah ada yang punya, Susi, Dina
“Monyet yang Cantik”, Yuke “Kakak yang Aneh”, dan buat semua
wanita yang ada di Bumi.
9.
Seluruh dosen Fakultas Teknik yang telah membagikan ilmunya
selama penulis berada di Universitas Sanata Dharma.
10.
Pak Petrus Setyo Prabowo S. T, selaku dosen Pembimbing Akademis
TE’01. Terima kasih Pak, sudah bersedia jadi teman curhat ketika saya
takut menyelesaikan TA.
11.
Bapak A. Bayu Primawan, S.T.,M.Eng selaku Ketua Jurusan Teknik
Elektro, Universitas Sanata Dharma, Yogyakarta.
12.
Romo Ir. Greg. Heliarko SJ.,SS.,BST.,MA.,M.Sc selaku Dekan
Fakultas Teknik, Universitas Sanata Dharma, Yogyakarta.
13.
Kepada “Kegelapan Mutlak” terima kasih sehingga aku mampu dan
sadar akan Tuhan.
14.
Dan semua pihak yang tidak dapat penulis sebutkan, terimakasih
banyak, ALLAH BAPA yang membalas segalanya.
Semoga tugas akhir ini dapat bermanfaat bagi kita semua, ALLAH
BAPA memberkati kita semua.
Yogyakarta, Januari 2007
Penulis
DAFTAR ISI
HALAMAN JUDUL
... i
HALAMAN PERSETUJUAN PEMBIMBING
... iii
HALAMAN PENGESAHAN
... iv
PERNYATAAN KEASLIAN KARYA
... v
MOTO DAN PERSEMBAHAN
... vi
INTISARI
... vii
ABSTRACT
... viii
KATA PENGANTAR
... ix
DAFTAR ISI
... xii
DAFTAR TABEL
... xvi
DAFTAR GAMBAR
... xviii
BAB I PENDAHULUAN
... 1
1.1
Judul ... 1
1.2
Latar Belakang ... 1
1.3
Perumusan Masalah ... 2
1.4
Pembatasan Masalah ... 2
1.5
Tujuan dan Manfaat Penelitian ... 2
1.6
Metodologi Penelitian ... 3
1.7
Sistematika Penulisan ... 3
2.1
Light Emitting Diode
... 5
2.2
Infra Red Emitting Diode
... 6
2.3
Fototransistor ... 7
2.4
Optocoupler
... 9
2.5
Schmitt
Trigger... 10
2.6
Penampil LCD 2 X 16 Karakter... 13
2.7
Mikrokontroler AT89S51 ... 15
2.8
Topologi Jaringan... 16
2.9
Standar Komunikasi Serial... 17
2.9.1
Konfigurasi Jaringan ... 19
2.9.2
Pengaturan Impedansi Terminal ... 22
2.9.3
Pemberian Prasikap Pada Jaringan RS-485 ... 24
2.9.4
Pengaman Jaringan RS-485 Terhadap Beda Potensial Listrik.... 26
BAB III PERANCANGAN
... 30
3.1
Diagram Blok Sistem Identifikasi Keberadaan Kereta Api ... 30
3.2
Perancangan Perangkat Keras ... 32
3.2.1
Konstruksi Jalur Kereta Api... 32
3.2.2
Rangkaian Nomor kereta Api, Sensor Pembaca Nomor
Kereta Api, dan Sensor Posisi... 33
3.2.2.1
Rangkaian Nomor Kereta Api dan Sensor
Pembaca Nomor Kereta Api ... 33
3.2.2.1.1
Rangkaian Nomor Kereta Api... 34
3.2.2.1.2
Sensor Pembaca Nomor kereta Api ... 36
3.2.2.2
Sensor Posisi ... 37
3.2.2.3
Rangkaian
Schmitt
Trigger... 39
3.2.3
LCD... 40
3.2.4
Bagian Komunikasi Serial RS-485 ... 41
3.2.5
IC Komunikasi Serial RS-485... 42
3.2.5
Konfigurasi Jaringan ... 43
3.2.5
Komponen Penyesuai Impedansi ... 43
3.2.5
Pemberian Prasikap pada Jaringan... 44
3.2.5
Pengaman Beda Potensial Untuk Jaringan... 47
3.2.5
Oscillator Mikrokontroler AT89S51... 48
3.3
Perancangan Perangkat Lunak ... 49
3.3.1
Diagram Alir Program Utama... 49
3.3.2
Rutin Ambil Data ... 50
1.2.1
Rutin Serial ... 51
BAB IV PENGAMATAN DAN PEMBAHASAN
... 52
4.1
Hasil Akhir Alat ... 52
4.1.1
Bagian Model Kereta Api ... 53
4.1.2
Bagian Stasiun kereta Api... 54
... 55
4.1.2.2
Sensor Posisi ... 56
4.1.2.2.1 Tegangan Kaki Anoda
IRED Optocoupler
H213A
... 56
4.1.2.2.2 Tegangan Kaki
Collector
Fototransistor... 56
4.1.2.2.3 Tegangan
Outuput
Rangkaian
Schmitt Trigger
57
4.1.3
Data Hasil Pengamatan ... 57
4.1.3.1
Pengamatan Ketepatan Pembacaan Identitas
Kereta Api ... 57
4.1.3.2
Pengamatan Kebenaran Pengiriman dan
penerimaan Data melalui Jalur komunikasi
Serial ... 59
BAB IV KESIMPULAN DAN SARAN
... 67
5.1
Kesimpulan ... 67
5.2
Saran ... 68
DAFTAR PUSTAKA
... 69
LAMPIRAN
... 70
DAFTAR TABEL
1.
Tabel 2.1 Output rangkaian IC 7414... 11
2.
Tabel 2.2 Tampilan LCD ... 14
3.
Tabel 3.1 Kombinasi nyala IRED ... 35
4.
Tabel 4.1 Kebenaran Pengiriman dan Penerimaan Melalui Jalur
Komunikasi Serial di Jalur 1 dengan Kereta Api Nomor
Identitas 1 ... 59
5.
Tabel 4.2 Kebenaran Pengiriman dan Penerimaan Melalui Jalur
Komunikasi Serial di Jalur 1 dengan Kereta Api Nomor
Identitas 5 ... 60
6.
Tabel 4.3 Kebenaran Pengiriman dan Penerimaan Melalui Jalur
Komunikasi Serial di Jalur 1 dengan Kereta Api Nomor
Identitas 7 ... 60
7.
Tabel 4.4 Kebenaran Pengiriman dan Penerimaan Melalui Jalur
Komunikasi Serial di Jalur 1 Tanpa Nomor Identitas... 61
8.
Tabel 4.5 Kebenaran Pengiriman dan Penerimaan Melalui Jalur
Komunikasi Serial di Jalur 2 dengan Kereta Api Nomor
Identitas 2 ... 63
9.
Tabel 4.6 Kebenaran Pengiriman dan Penerimaan Melalui Jalur
Komunikasi Serial di Jalur 2 dengan Kereta Api Nomor
Identitas 3 ... 63
11.
Tabel 4.5 Kebenaran Pengiriman dan penerimaan Melalui Jalur
Komunikasi Serial di Jalur 2 dengan Kereta Api Tanpa Nomor
Identitas ... 65
DAFTAR GAMBAR
1.
Gambar 2.1 Simbol
Light Emitting Diode
(LED)... 5
2.
Gambar 2.2 Rangkaian LED ... 6
3.
Gambar 2.3 Skematik Fototransistor ... 7
4.
Gambar 2.4 Rangkaian Fototransistor... 8
5.
Gambar 2.5 Simbol
Optocoupler
... 9
6.
Gambar 2.6 Rangkaian Dasar
Optocoupler
... 10
7.
Gambar 2.7 Konfigurasi pi-pin IC 7414 ... 11
8.
Gambar 2.8 (a) Bentuk Gelombang
Input
Schmitt trigger
... 12
9.
Gambar 2.8 (b) Bentuk Gelombang
Output
Schmitt trigger
... 12
10.
Gambar 2.9
Display
LCD 2 X 16 Karakter... 13
11.
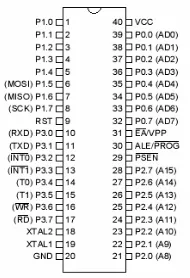
Gambar 2.10 Konfigurasi Kaki-Kaki IC AT89S51 ... 15
12.
Gambar 2.11 Jaringan Komunikasi dengan Topologi
Bus
... 16
13.
Gambar 2.12 Jaringan Komunikasi dengan Topologi Bintang (
Star
)... 16
14.
Gambar 2.13 Jaringan Komunikasi dengan Topologi Cincin (
Circle
) ... 17
15.
Gambar 2.14 Sinyal
Output
dari Pemancar (
driver
) ... 19
16.
Gambar 2.15 Sinyal
Input
untuk Penerima (
receiver
) ... 19
17.
Gambar 2.16 Jaringan
multidrop
RS-485 dengan Dua Kabel ... 20
18.
Gambar 2.17 Jaringan
multidrop
RS-485 dengan Empat Kabel... 21
19.
Gambar 2.18 (a) Rangkaian
Parallel Termination
... 23
20.
Gambar 2.18 (b) Rangkaian
AC-Coupled
Termination ... 24
21.
Gambar 2.19
Tranceiver
dengan Resistor Prasikap... 24
24.
Gambar 2.22 Sistem Proteksi
Shunting Device
dengan
menggunakan Dioda Zener ... 28
25.
Gambar 2.23 Sistem Proteksi
Shunting Device
dengan
Menggunakan Dioda Zener dan
Fuse
Seri... 29
26.
Gambar 3.1 Diagram Blok “Sistem Identifikasi Keberaqdaan
Kereta Api” ... 31
27.
Gambar 3.2 Konstruksi Jalur Kereta Api... 32
28.
Gambar 3.3 Rangkaian
IRED
... 34
29.
Gambar 3.4 Posisi Rangkaian
IRED
pada Kereta Api ... 35
30.
Gambar 3.5 Rangkaian Fototransistor... 36
31.
Gambar 3.6 Posisi Rangkaian Fototransistor pada Stasiun
Kereta Api ... 37
32.
Gambar 3.7 Rangkain
Optocoupler
... 38
33.
Gambar 3.8 Posisi
Optocoupler
pada Stasiun Kereta Api ... 39
34.
Gambar 3.9 (a) Rangkaian
Schmitt Trigger
untuk Sensor Posisi... 39
35.
Gambar 3.9 (b) Rangkaian
Schmitt Trigger
untuk Sensor
Pembaca Nomor Identitas Kereta Api... 40
36.
Gambar 3.10 Tampilan pada LCD 2 X16 Karakter ... 40
37.
Gambar 3.11 Rangkaian LCD pada Mikrokontroler... 41
38.
Gambar 3.12 Rangkaian Sistem Komunikasi RS-485 ... 42
39.
Gambar 3.13 IC RS-485... 42
40.
Gambar 3.14 Rangkaian RS-485 dengan Konfigurasi
Multidrop
2 Kabel ... 43
41.
Gambar 3.15 Komponen Penyesuai Impedansi ... 44
42.
Gambar 3.16 Rangkaian Prasikap untuk Jaringan ... 47
43.
Gambar 3.17 Rangkaian Pengaman dengan Metode
Shunting
Device
... 48
44.
Gambar 3.18 Rangkaian Osilator Mikrokontroler AT89S51... 48
45.
Gambar 3.19 Diagram Alir Program utama Sistem Identifikasi
Keberadaan kerta Api... 49
46.
Gambar 3.20 Rutin Ambil Data ... 50
47.
Gambar 3.21 Rutin Serial... 51
48.
Gambar 4.1 Bentuk Fisik dari Sistem Identifikasi Keberadaan
kereta Api ... 52
49.
Gambar 4.2 Miniatur Kereta Api ... 53
50.
Gambar 4.3 Gambar Bagian dari Satu Stasiun... 54
51.
Gambar 4.4 Grafik Data Pembacaan Identitas Kereta Api di
Setiap Stasiun Kereta Api ... 58
1. 1. Judul
Sistem Identifikasi Keberadaan Kereta Api.
1. 2. Latar Belakang
Kereta api merupakan sarana transportasi umum yang cukup efisien bagi
masyarakat. Dikatakan demikian, karena kereta api murah, sehingga terjangkau
bagi semua lapisan masyarakat dan cepat, sehingga dapat menghemat waktu.
Pengelolaan sistem keamanan kereta api perlu diperhatikan. Sistem
keamanan pada kereta api diharapkan memberikan rasa aman dan nyaman bagi
pengguna kereta api dan juga bagi pengguna sarana transportasi lain. Dengan
pengelolaan yang baik, diharapkan kecelakaan yang dapat memakan banyak
korban dapat dihindarkan.
Keberadaan kereta api pada rel kereta api, saat berjalan maupun berhenti,
perlu diperhatikan dan perlu diinformasikan ke setiap stasiun kereta api yang akan
dilalui. Oleh karena itu diperlukan sistem identifikasi keberadaan kereta api. Pada
penelitian ini, akan dibuat model sistem yang dapat menginformasikan
keberadaan suatu kereta api ke stasiun-stasiun kereta api.
2
1. 3. Perumusan Masalah
Sistem identifikasi keberadaan kereta api memanfaatkan cahaya
infra red
sebagai sumber informasi. Informasi berupa nomor kereta api dan posisi kereta
api diterima oleh sensor dan kemudian diolah serta dikirimkan ke setiap stasiun
kereta api. Semua proses pengolahan dan pengiriman informasi dilakukan
mikrokontroler AT89S51. Sumber cahaya
infra red
berupa
Infra Red Emittig
Diode
(
IRED
)
dan fototransistor sebagai penerima (sensor) cahaya
infra red
.
1. 4. Pembatasan Masalah
Adapun batasan-batasan masalah dalam penelitian sistem identifikasi
keberadaan kereta api adalah sebagai berikut :
1.
Menggunakan satu jalur rel kereta api, dan tiga stasiun kereta api.
2.
Jalur kereta api hanya bisa dilalui satu kereta api.
3.
Menggunakan dua buah kereta api miniatur.
4.
Saat sensor membaca nomor kereta api, kereta api harus berhenti.
5. Pengiriman informasi ke stasiun lain dilakukan dengan cara bergantian.
1. 5. Tujuan dan Manfaat Penelitian
Tujuan dari penyusunan tugas akhir ini adalah membuat miniatur
(
prototype
) sistem identifikasi keberadaan kereta api.
Manfaat pembuatan miniatur sistem identifikasi keberadaan kereta api
adalah sebagai salah satu solusi pemecahan masalah transportasi darat, khususnya
jalan yang lain. Keamanan dan kenyamanan dapat dicapai dengan adanya
pengawasan keberadaan kereta api di jalur kereta api oleh stasiun kereta api
sehingga tumbukan antar kereta api dapat dikurangi.
1. 6. Metodologi Penelitian
Laporan tugas akhir ini disusun berdasarkan hasil pengamatan dan
penelitian. Untuk dapat merencanakan dan membuat peralatan maka dilakukan
langkah-langkah sebagai berikut :
1.
Studi literatur tentang pemasalahan yang ada, yaitu tentang peralatan
yang akan dibuat termasuk cara kerja, dan sekaligus cara-cara
merencanakan dan membuat peralatan.
2.
Perencanaan peralatan dengan spesifikasi tertentu sesuai batasan
masalah.
3.
Membuat peralatan dari bagian perbagian yang kemudian diuji.
Bagian-bagian tersebut lalu akan disatukan menjadi sebuah sistem dan akan
diuji kembali secara menyeluruh.
1. 7. Sitematika Penulisan
Sistematika penulisan pada penulisan tugas akhir ini adalah sebagai berikut:
1.
Bab I : Pendahuluan
Bab ini berisi judul, latar belakang, perumusan masalah, pembatasan masalah,
4
2.
Bab II : Dasar Teori
Bab ini berisi teori-teori dan penjelasan tentang komponen-komponen yang
digunakan dalam penelitian.
3.
Bab III : Perancangan
Bab ini berisi perancangan perangkat keras dan perangkat lunak yang dibuat.
4.
Bab IV : Hasil Pengamatan Dan Pembahasan
Bab ini berisi pembahasan hasil pengamatan perangkat keras dan perangkat
lunak.
5.
Bab V : Kesimpulan Dan Saran
Dalam merancang dan membuat sebuah alat, tentunya harus terlebih
dahulu mengetahui prinsip kerja dasar dan piranti atau komponen yang digunakan
pada alat yang akan dibuat.
2. 1
. Light Emitting Diode
Light Emitting Diode
atau biasa disingkat
LED
adalah sebuah dioda yang
mampu memancarkan cahaya. Prinsip kerja dari
LED
sama dengan dioda yang
biasa ditemui. Dioda biasa saat diberi prasikap tegangan maju akan menghasilkan
energi yang
diradiasikan menjadi panas. Sedangkan energi yang dihasilkan
LED
diradiasikan menjadi cahaya.
Dioda biasanya dibuat dari silicon, sedangkan
LED
dibuat dari
gallium,
arsenic,
atau
phosporus
.
LED
dapat memancarkan cahaya yang tampak oleh mata
yaitu merah, hijau, kuning, biru, jingga.
LED
juga dapat memancarkan cahaya
yang tak tampak oleh mata yaitu inframerah. Simbol
LED
dapat dilihat pada
gambar 2.1.
Gambar 2. 1
Simbol Light Emitting Diode (LED)
6
Rangakaian
LED
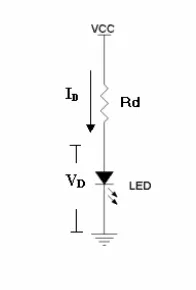
dapat dilihat pada gambar 2.2.
Gambar 2. 2
Rangkaian LED
Dengan melihat Gambar 2.2, maka dapat dicari nilai R
ddengan
persamaan :
d D D
CC
V
I
R
V
−
=
D D CC d
I
V
V
R
=
−
...( 2.1 )
Pada persamaan 2.1 R
dadalah nilai resistor yang dibutuhkan untuk menahan arus
yang melalui
LED
, V
CCadalah nilai tegangan
input
, V
Dadalah nilai tegangan
maju
LED
, dan I
Dadalah nilai arus yang dibutuhkan oleh
LED
.
2. 2
. Infra Red Emitting Diode
Infra Red Emitting Diode (IRED)
adalah salah satu jenis
LED. IRED
mempunyai karakteristik yang sama dengan
LED
tetapi cahaya yang dipancarkan
berbeda.
LED
memancarkan cahaya tampak, sedangkan
IRED
sesuai dengan
IRED
digunakan dalam aplikasi komunikasi serat optik,
alignment
(penjajaran),
scanning system
, dan juga digunakan pada piranti penyimpan data
seperti CD dan DVD. Simbol dan rangkaian
IRED
sama dengan
LED,
sehingga
persamaan 2.1. berlaku juga untuk
IRED
.
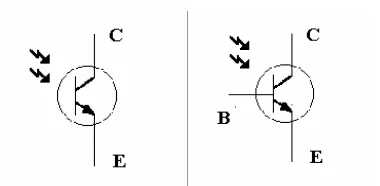
2. 3. Fototransistor
Fototransistor adalah piranti peka cahaya atau sering disebut sebagai
transduser fotoelektrik, yaitu piranti elektronis yang memiliki perubahan
karakteristik listrik bila dikenai cahaya tampak maupun tak tampak. Fototransistor
terbentuk oleh transistor, sehingga memiliki sifat yang mirip dengan
Bipolar
Junction Transistor
(BJT), hanya saja sangat berbeda satu sama lain secara fisik.
Fototransistor didesain dengan penutup transparan yang berfungsi untuk
meneruskan atau menerima cahaya, sedangkan BJT didesain dengan penutup yang
tidak transparan supaya cahaya tidak tembus sehingga tidak mempengaruhi kerja
BJT. Kemasan fototransistor dapat dijumpai sebagai piranti dua terminal tanpa
koneksi
basis
dan piranti 3 terminal dengan koneksi
basis
. Simbol fototransistor
dua terminal tanpa koneksi
basis
dan tiga terminal dengan koneksi
basis
dapat
dilihat pada gambar 2.3.
8
Pada fototransistor, arus
basis
dipengaruhi oleh cahaya infra merah yang
mengenai permukaan dari fototransistor, sehingga ketika cahaya infra merah
mengenai permukaan fototransistor akan timbul arus
basis
(I
B). Ketika timbul arus
basis
maka resistansi
emitter-collector
akan menjadi kecil sekali mendekati nol,
sehingga arus akan mengalir ke kaki
collector
(I
C). Karena ada arus yang mengalir
ke kaki
collector
maka tegangan pada kaki
collector
mendekati 0V. Keadaan
tersebut menyatakan keadaan transistor dalam keadaan
on
. Sebaliknya apabila
tidak ada cahaya infra merah atau dapat dikatakan dalam keadaan gelap, maka
tidak ada I
B. Ketika tidak ada arus I
B, maka resistansi
emitter-collector
menjadi
besar dan tidak ada arus
collector
(I
C), sehingga tegangan di kaki
collector
terhadap
ground
(Vc) sama dengan Vcc, keadaan tersebut menyatakan transistor
dalam keadaan
off
. Rangkaian fototransistor dapat dilihat pada gambar 2. 4.
Gambar 2. 4
Rangkaian fototransistor
Pada fototransistor berlaku persamaan saat saturasi :
Volt
0
≅
o
Sedangkan saat
cut off
:
Vcc
V
o=
………...
…………( 2. 3)
Untuk mencari nilai Rc pada gambar di atas digunakan persamaan :
C C CE
CC
V
R
I
V
−
=
C CE CC C
I
V
V
R
=
−
...
( 2. 4 )
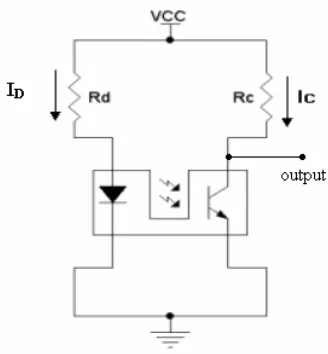
2. 4
. Optocoupler
Optocoupler
disusun dari dua buah piranti elektronika yaitu
IRED
dan
fototransistor dalam satu kemasan.
IRED
berada pada bagian
input
sedangkan
fototransistor berada pada bagian
output
.
Optocoupler
dibuat sedemikian rupa
sehingga cahaya yang dipancarkan oleh
IRED
diterima dengan baik oleh
fototransistor. Gambar 2. 5 memperlihatkan simbol
optocoupler
:
Gambar 2. 5
Simbol Optocoupler
Ketika
arus
I
Dpada optocoupler
mengalir, maka IRED
akan aktif dan
memancarkan cahaya inframerah. Cahaya inframerah yang dipancarkan oleh IRED
diterima oleh permukaan fototransistor, sehingga akan menimbulkan arus basis
(I
B).
Keadaan tersebut akan menyebabkan resistansi
emitter-collector
akan menjadi
kecil sekali mendekati nol, sehingga arus akan mengalir ke kaki
collector
(I
B
10
ini menyebabkan tegangan pada kaki
collector
mendekati 0V. Keadaan tersebut
menyatakan keadaan transistor dalam keadaan
on
.
Sebaliknya apabila tidak ada cahaya infra merah atau dapat dikatakan
dalam keadaan gelap, maka tidak ada I
B. Ketika tidak ada arus I
B, maka resistansi
emitter-collector
menjadi besar dan tidak ada arus
collector
(I
C), sehingga
tegangan di kaki
collector
terhadap
ground
(Vc) sama dengan Vcc. Ketika
tegangan di kaki
collector
terhadap
ground
sama dengan V
CCmaka transistor
dalam keadaan
off
. Untuk mendapatkan keadaan gelap pada bagian fototransistor
optocoupler
, maka antara
IRED
dan fototransistor ditutup dengan bahan tipis yang
tidak dapat meneruskan cahaya inframerah. Gambar 2. 6 memperlihatkanr
angkaian dasar
optocoupler
.
Gambar 2. 6
Rangkaian Dasar Optocoupler
2. 5
. Schmitt Trigger
(Pemicu
Schmitt
)
Pemicu Schmitt merupakan suatu contoh kategori rangkaian yang dikenal
Schmitt Trigger
pulsa dan sebagai suatu piranti pengkondisi sinyal.
Schmitt
Trigger
menghasilkan suatu tegangan
output
segi empat dengan pinggiran naik
dan turun yang tajam, hal ini dapat dilihat pada gambar 2.8 (b). Waktu bangkit
yang cepat ini sangat dibutuhkan, karena rangkaian-rangkaian dimaksudkan untuk
bekerja dengan tegangan
input
dua keadaan.
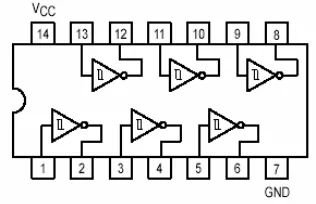
IC
Schmitt Trigger
adalah IC 7414 yang terdiri dari 6
Schmitt Trigger
dan
memiliki 14 pin. Pin 1, 3, 5, 9, 11, 13 sebagai
input
, pin 2, 4, 6, 8, 10, 12 sebagai
output
, pin 7 sebagai kaki
ground
, dan pin 14 sebagai Vcc. Gambar 2. 7
memperlihatkan konfigurasi pin-pin IC 7414 dan gambar 2. 8 memperlihatkan
bentuk gelombang
input
dan
output
Schmitt Trigger
.
Gambar 2. 7
Konfigurasi pin-pin IC 7414
Tabel 2. 1
Output rangkaian IC 7414
Input Output
A Y
L
H
H
L
H = High Logic Level
L = Low Logic Level
Pada tabel 2.1 dapat dilihat karakteristik
input-output
rangkaian
inverting
Schmitt
trigger. Bila
input
logika rendah, maka
output
logika tinggi. Bila
input
12
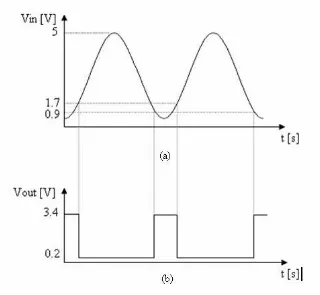
Tegangan ambang positif
Schmitt trigger
(V
T+) adalah 1,7 V dan tegangan
ambang negatif
Schmitt trigger
(V
T-) adalah 0,9 V. Sedangkan tegangan
output
tinggi (V
OH)
Schmitt trigger
adalah 3,4 V dan tegangan
output
rendah (V
OL)
Schmitt trigger
adalah 0,2 V.
Gambar 2. 8
(a)
Bentuk gelombang input dan (b) bentuk gelombang output Schmit
Trigger
Dari gambar 2. 8, terlihat bahwa saat
input
0V sampai dengan 0,9V, maka
output
rangkaian
Schmitt Trigger
adalah 3,4V. Saat
input
0,9V sampai dengan
1,7V,
output
akan tetap 3,4V mengikuti tegangan
input
sebelumnya. Namun
2. 6. Penampil LCD 2 X 16 Karakter
LCD
(
Liquid Crystal Display
) adalah suatu tampilan (
display
) dari bahan
cairan kristal yang dioperasikan dengan menggunakan sistem dot matriks. Pada
perancangan alat ini, digunakan d
isplay
LCD 2
×
16 karakter seperti terlihat pada
gambar 2. 9. LCD ini memiliki 2 baris dan 16 kolom karakter. Sehingga jumlah
total karakter yang dapat ditampilkan sekaligus sebanyak 32 karakter.
Masing-masing karakter tersebut terbentuk dari susunan dot yang berukuran 8 baris dan 5
kolom dot.
5v
DB0 DB1 DB2 DB3 DB7 DB4 DB5 RS
E 0
2
1
3
4
5
6
7
8
9
10
11
12
13
14
15
16
LCD
DISPLAY
2 * 16 KARAKTER
DB6
R/W
Vcc Vee
GND
A
K
Gambar 2. 9
Display LCD 2 × 16 karakter
LCD menggunakan sistem pengiriman data 8-bit dan diperlukan 10
jalur data untuk berhubungan dengan sistem mikrokontroler AT89S51. Kesepuluh
jalur data tersebut adalah :
1.
Delapan jalur data untuk mengirimkan data instruksi dan data karakter yang
akan ditampilkan. Kedelapan jalur tersebut secara berurutan yaitu kaki 7
(DB0), kaki 8 (DB1), kaki 9 (DB2), kaki 10 (DB3), kaki 11 (DB4), kaki 12
14
2.
Dua jalur lainnya adalah kaki 4 (RS
/
Register
select
), dan kaki 6 (E
/Enable
).
LCD yang digunakan adalah LCD yang memiliki 16 pin, seperti
ditunjukkan pada tabel 2.2.
Tabel 2. 2
Tampilan LCD
Nomor Pin Simbol
Nomor Pin Simbol
1 V
EE(0V) 9
DB2
2 V
CC(5V) 10
DB3
3 GND
(0V)
11 DB4
4 RS
12 DB5
5 R/W
13 DB6
6 E
14 DB7
7 DB0
15 A
8 DB1
16 K
Deskripsi pin:
1.
DB0 s/d DB7, merupakan jalur data yang dipakai untuk menyalurkan kode
ASCII maupun perintah pengatur kerja LCD tersebut.
2.
RS
(
register
select),
merupakan pin yang dipakai untuk membedakan jenis
data yang dikirim ke LCD. Jika RS berlogika ‘0’, maka data yang dikirim
adalah perintah untuk mengatur kerja LCD tersebut. Jika RS berlogika ‘1’,
maka data yang dikirim adalah kode ASCII yang ditampilkan.
3.
R/W
(read/write),
merupakan pin yang digunakan untuk mengaktifkan
pengiriman dan pengambilan data ke dan dari LCD. Jika R/W berlogika ‘0’,
maka akan diadakan pengiriman data ke LCD. Jika R/W berlogika ‘1’, maka
akan diadakan pengambilan data dari LCD.
mikrokontroler.A
(anoda)
dan K
(katoda)
, merupakan pin yang digunakan
untuk menyalakan
backlight
dari layar LCD.
2. 7. Mikrokontroler AT89S51
AT89S51 adalah suatu mikrokontroler 8-bit dengan kinerja tinggi CMOS,
mempunyai 4K
bytes
memori
flash
yang dapat diprogram ulang dan hanya
membutuhkan daya yang rendah. AT89S51 dibuat dengan teknologi tinggi dengan
isi memori tidak mudah hilang, meskipun tanpa catu daya dan kompatibel dengan
standar industri 80C51.
On-chip flash
dari AT89S51 memungkinkan memori
program dapat diprogram (ditulis dan dihapus) kembali ke sistem. Dengan
kombinasi 8-bit CPU serbaguna yang dapat diprogram ulang, AT89S51 menjadi
mikrokontroler yang fleksibel dan hemat biaya dalam banyak aplikasi kendali.
AT89S51 mempunyai beberapa fitur standar, yaitu memiliki 4K
bytes
memori
flash
, 128 bytes RAM, 32 jalur I/O,
watchdog timer,
dua
data pointer
register
, dua
timer/counter
16-bit, 6 sumber interupsi,
full-duplex serial port
,
on-chip oscillator
, dan untai
clock.
Gambar 2.10 memperlihatkan konfigurasi 40 kaki
IC AT89S51.
16
2. 8. Topologi Jaringan Komunikasi
Topologi jaringan komunikasi adalah gambaran secara fisik dari pola
hubungan antara komponen-komponen jaringan komunikasi. Ada tiga jenis
topologi jaringan komunikasi, yaitu:
1.
Topologi
bus
, adalah topologi jaringan komunikasi dimana semua
terminal
driver
terhubung ke suatu media transmisi. Gambar 2.11
memperlihatkan jaringan komunikasi dengan topologi
bus
.
Gambar 2. 11
Jaringan Komunikasi dengan Topologi Bus
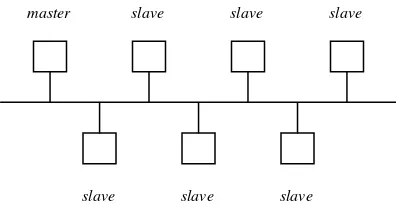
2.
Topologi bintang (
star
), adalah topologi jaringan komunikasi dimana
sebuah terminal pusat bertindak sebagai pengatur
traffic
(lalu lintas)
jaringan. Gambar 2.12 memperlihatkan jaringan komunikasi dengan
topologi bintang.
Gambar 2. 12
Jaringan Komunikasi dengan Topologi Bintang (Star)
master slave slave slave
slave slave slave
master slave slave
slave
3.
Topologi cincin (
ring
), adalah topologi jaringan komunikasi dimana
masing-masing terminal
driver
dihubungkan ke terminal
driver
di
sebelahnya, sehingga membentuk suatu cincin yang tertutup. Gambar
2. 13 memperlihatkan jaringan komunikasi dengan topologi cincin.
master
slave
slave
slave slave
slave
Gambar 2. 13
Jaringan Komunikasi dengan Topologi Cincin (Circle)
2. 9. Standar Komunikasi Serial
Pada sistem transmisi data secara serial, dikenal dua sistem transmisi,
yaitu:
1.
Transmisi data secara tidak seimbang (
unbalanced line
).
Pada sistem ini, nilai amplitudo sinyal tergantung pada beda potensial antara
penghantar sinyal terhadap
ground
.
2.
Transmisi data secara seimbang. (
balanced line
).
Pada sistem transmisi data secara seimbang, kedua penghantarnya selalu
18
Transmisi data secara tidak seimbang misalnya dengan sistem RS-232
yang menggunakan sebuah penghantar untuk sinyal dan sebuah penghantar untuk
acuan pentanahan (
grounding
). Pada sistem ini, nilai amplitudo sinyal tergantung
pada beda potensial antara penghantar sinyal terhadap
ground
. Yang berfluktuasi
hanyalah nilai amplitudo pada penghantar sinyal, sedangkan penghantar untuk
pertanahan adalah tetap.
Sedangkan pada sistem transmisi data secara seimbang kedua
penghantarnya selalu berfluktuasi sehingga selalu tercipta beda potensial pada
kedua penghantar. Hal inilah yang menyebabkan keunggulan sistem transmisi
data secara seimbang, yaitu sinyalnya masih dapat terdeteksi pada jarak yang
cukup jauh. Selain itu, sistem transmisi data secara seimbang ini lebih tahan
terhadap
noise
, karena
noise
hanya memiliki satu nilai. Sistem transmisi data
serial secara seimbang ini biasanya menggunakan sistem standar 422 dan
RS-485.
Sistem transmisi data secara serial dengan standar komunikasi serial
RS-485 dikembangkan sejak tahun 1983 dan mampu mentransmisikan data yang
cukup jauh yaitu 1,2 km. Standar komunikasi serial RS-485 dapat diterapkan pada
suatu jaringan telepon tunggal (
party line
) atau pada jaringan
multidrop
(jaringan
yang menggunakan topologi
bus
). Ada sebanyak 32 pasang pemancar
(
driver
)/penerima (
receiver
) yang dapat disatukan pada jaringan
multidrop
. Pada
sisi pemancar (
driver
), akan menghasilkan tegangan sebesar 2 sampai 6 Volt yang
seperti ditunjukkan pada gambar 2.14. Pada penerima (
receiver
) mampu
menerima data dengan nilai amplitudo sinyal minimal +200mV sampai –200mV
hingga +6 V sampai –6 V (sinyal maksimal) yang masih dapat diterima antara
terminal A-B seperti ditunjukkan pada gambar 2.15.
Gambar 2. 14
Sinyal output dari pemancar (driver)
Gambar 2. 15
Sinyal input untuk penerima (receiver)
2. 9. 1. Konfigurasi Jaringan
Sistem konfigurasi jaringan tidak ditentukan secara khusus, sistem
jaringan lebih mempertimbangkan pada kebutuhan sistem secara fisik.
20
mengeluarkan sinyal, menerima sinyal dan keadaan terbuka (
high impedance
),
dapat dikonfigurasikan untuk komunikasi
half-duplex
(mengirim dan menerima
data secara bergantian) dengan penyambungan dua kabel seperti terlihat pada
gambar 2.16 dan komunikasi
full-duplex
(mengirim dan menerima data pada
waktu bersamaan) dengan penyambungan empat kabel seperti terlihat pada
gambar 2.17. Dalam pengkabelan boleh saja hanya menyambungkan pasangan
pemancar dan penerima tanpa menggunakan kabel
ground
. Tetapi dengan
penggunaan kabel
ground
akan lebih aman bagi sistem, hal ini untuk menjaga
jangkauan tegangan bersama (
common mode voltage / V
cm) yang aman antara
pengirim maupun penerima. Dengan menggunakan kabel
ground
pada sistem juga
membuat gangguan sinyal lain (
noise
) dapat dikurangi.
Gambar 2. 16
Jaringan multidrop RS-485 dengan dua kabel
Pada konfigurasi jaringan
multidrop
RS-485 dengan dua kabel sangat
menghemat dalam penggunaan kabel, jarak maksimum antar
driver
adalah 400
transmisi data pada salah satu arah, diikuti ke arah lainnya secara bergantian. Pada
setiap
driver
terdapat
generator
dan
receiver
.
Generator
berfungsi untuk
megirimkan data serial, sedangkan
receiver
berfungsi sebagai penerima data
serial.
Gambar 2. 17
Jaringan multidrop RS-485 dengan empat kabel
Konfigurasi jaringan
multidrop
RS-485 dengan empat kabel digunakan
untuk komunikasi
full duplex
, yaitu transmisi data dua arah pada waktu yang
bersamaan. Seperti pada konfigurasi jaringan
multidrop
RS-485 dengan dua kabel,
pada konfigurasi jaringan
multidrop
RS-485 dengan empat kabel, jarak maksimal
antar
driver
juga 400
feet
. Pada setiap
driver
terdapat
generator
dan
receiver.
Pada konfigurasi jaringan
multidrop
RS-485 dengan empat kabel terdapat
master
dan beberapa
slave
. Antara
slave
dengan
master
dapat terjadi komunikasi
full
22
2. 9. 2. Pengaturan Impedansi Terminal
Pengaturan impedansi terminal dimaksudkan untuk menyesuaikan
impedansi
driver
dengan impedansi jalur transmisi yang digunakan. Apabila
impedansinya tidak sesuai, sinyal yang ditransmisikan tidak diserap sempurna
oleh beban dan sebagian sinyal dipantulkan kembali ke jalur transmisi.
Pengaturan impedansi terminal ini beracuan pada panjang kabel
pengahantar dan kecepatan laju data yang digunakan sistem. Pengaturan
impedansi terminal dapat diabaikan bila
delay
propagasi saluran data lebih rendah
dari lebar satu bit data.
Sebagai contoh sebuah sistem yang menggunakan kabel dengan panjang
600 meter, maka
delay
propagasi saluran dapat dihitung dengan mengalikan
panjang kabel dengan kecepatan laju propagasi yang biasanya sebesar 66%
sampai 75 % dari kecepatan cahaya (= 3X10
8m/s). Dengan panjang kabel 600
meter maka perjalanan bolak-balik data 1200 meter dengan laju propagasi 66% x
kecepatan cahaya (= 3 x10
8m/s), sehingga
delay
propagasi sebesar 6,06
μ
s. Bila
perjalanan data sebanyak tiga kali bolak-balik maka
delay
propagasi sebesar
18,18
μ
s. Lebar satu bit data untuk 9600 baud adalah 104
μ
s. Pada kasus ini
delay
propagasi sebesar 18,18
μ
s kurang dari lebar satu bit data 104
μ
s, sehingga
Ada dua macam pengaturan impedansi terminal, yaitu:
1.
Parallel termination
.
Yaitu dengan menambahkan resistor yang dipasang paralel sebagai
penyesuai impedansi. Nilai resistor ini pada umumnya sebesar 120
Ω
. Nilai ini
didapatkan dari nilai impedansi intrinsik kabel penghantar transmisi.
2.
Dengan
AC-couple termination.
Yaitu dengan menambahkan resistor yang dipasang paralel sebagai
penyesuai impedansi yang dirangkai seri dengan kapasitor kecil yang
berfungsi untuk menghilangkan efek pemuatan DC.
Gambar 2.18 (a) memperlihatkan gambar rangkaian
parallel termination,
dan gambar 2.18 (b) memperlihatkan gambar rangkaian
ac-coupled
termination
.
24
2. 9. 3. Pemberian Prasikap Pada Jaringan RS-485
Ketika suatu jaringan RS-485 berada dalam keadaan
idle
(menunggu),
semua
driver
RS-485 mejadi penerima. Pada keadaan ini, tidak ada
driver
yang
aktif pada jaringan dan semua dalam keadaan
tristate
. Tanpa ada yang
mengendalikan jaringan, maka sistem dalam keadaan tidak menentu. Untuk
memelihara status
idle
dalam keadaan jaringan kosong, maka perlu dipasangkan
resistor yang dirangkai
pullup
dengan saluran data B terhadap V
CC(umumnya
bernilai +5 Volt) dan resistor
pulldown
pada saluran data A terhadap
ground
.
Gambar 2. 19 memperlihatkan rangkaian
transceiver
dengan resistor prasikap.
Untuk memperoleh nilai resistor prasikap adalah sebagai berikut :
-
Masing-masing nilai impedansi untuk
drive
r RS-485 adalah 12K
Ω
dan
dirangkai secara paralel, maka jumlah beban (R
beban) adalah
n
beban
R
R
R
R
R
1
...
1
1
1
1
3 2 1
+
+
+
+
=
………(2. 5)
dengan :
n maksimal = 32
- Jumlah beban dirangkai paralel dengan 2 resistor penyesuai impedansi, maka
jumlah beban total (
R
total) adalah
pi pi beban
total
R
R
R
R
1
1
1
1
=
+
+
……….(2. 6)
-
Nilai amplitudo sinyal minimal adalah 200mV, maka arus (
I
)yang dihasilkan
total
R
I
3
10
200
×
−=
………..(2. 7)
-
Untuk menciptakan arus prasikap sebesar
I
dengan tegangan catu 5V, maka
resistor (
R
)yang dibutuhkan sebesar
I
R
=
5
………...(2. 8)
-
Resistor prasikap yang dipasangkan pada dua sisi yaitu antara V
CCdengan
line
B dan
line
A dengan
ground
, maka nilai resistansi prasikap (
R
prasikap) adalah
2
R
26
2. 9. 4. Pengaman Jaringan RS-485 Terhadap Beda Potensial Listrik
Pada sistem komunikasi standar RS-485 yang menggunakan dasar sistem
beda potensial sinyal dengan besar nilai perbedaan sinyal maksimal 6 Volt, ketika
jarak antar sistem jauh, maka besar nilai amplitudo sinyal dapat berbeda. Hal ini
disebabkan masing-masing sistem menggunakan acuan
ground
lokal yang
berbeda. Untuk itu, perlu kiranya dibedakan antara
ground
sinyal dengan referensi
sinyal komunikasi. Sedangkan
ground
sinyal adalah
grounding
lokal yang dapat
juga mempunyai beda potensial terhadap
ground
referensi.
Untuk menanggulangi perbedaan
ground
yang dapat berakibat berbedanya
amplitudo sinyal, maka dapat ditempuh dua cara pencegahan:
1.
Dengan memisahkan antara
ground
data dengan
ground
lokal
/casing/ground
power
. Caranya dengan menggunakan koneksi optik (dapat berupa
optocoupler
atau komponen optik yang lain). Gambar 2.20 memperlihatkan
pemisahan
ground
dengan isolasi optik.
2.
Menyambungkan
ground
data dan
ground
lokal/
ground power
dengan
menggunakan konektor dengan impedansi rendah/yang dapat berupa resistor
penyambungan
ground
data dan
ground
lokal dengan koneksi resistor.
Gambar 2. 20.
Pemisahan ground dengan isolasi optik
Gambar 2. 21.
Penyambungan ground data dan ground lokal dengan koneksi resistor
Ada pula cara pengamanan yang lain, yaitu dengan metode
shunting
device
. Metode ini memiliki dua cara yang memiliki kelebihan masing-masing:
1.
Cara pertama, yaitu dengan memasangkan dioda zener bolak-balik secara
shunt
terhadap
ground
ataupun terhadap masing-masing penghantar
jaringan. Kelebihan cara ini adalah mampu memberi proteksi rangkaian
dari penurunan tegangan dari masing-masing penghantar terhadap
ground
.
Kelemahannya memiliki batas ambang tegangan yang tinggi dan tingkat
pengamanannya lambat. Gambar 2. 22 memperlihatkan gambar sistem
28
2.
Cara kedua dengan memasangkan dioda zener bolak-balik secara
shunt
dan merangkaiakan
fuse
secara seri. Gambar 2. 23 memperlihatkan s
istem
proteksi shunting device dengan menggunakan dioda zener dan fuse seri.
(a)
(b)
BAB III
PERANCANGAN
3.1. Diagram Blok Sistem Identifikasi Keberadaan Kereta Api
Dalam pembuatan sistem identifikasi keberadaan kereta api diperlukan dua
jenis perancangan, yaitu perancangan perangkat keras (
hardware
) dan perangkat
lunak (
software
). Perancangan perangkat keras meliputi perancangan rel kereta
api yang akan digunakan, perancangan rangkaian sensor posisi, perancangan
rangkaian nomor kereta api dan sensor pembaca nomor kereta api, perancangan
rangkaian standar RS-485, dan perancangan rangkaian mikrokontroler.
Perancangan perangkat lunak berupa diagram alir (
flowchart
) program yang akan
digunakan dalam mikrokontroler.
Gambar 3.1 memperlihatkan blok diagram dari sistem identifikasi
keberadaan kereta api. Sensor posisi dan sensor pembaca nomor kereta api
sebagai
input
data ke mikrokontroler, LCD penampil data (
output
) dari
mikrokontroler, dan untuk antar muka antara satu mikrokontroler dengan
mikrokontroler yang lain menggunakan komunikasi data serial.
Pada tiap stasiun kereta api terdapat dua sensor pembaca nomor kereta api
dan dua pasang sensor posisi kereta api. Secara garis besar cara kerja sistem
identifikasi keberadaan kereta api ini adalah ketika kereta api masuk ke stasiun
kereta api, maka stasiun kereta api akan membaca identitas kereta api dan
membaca posisi kereta api tersebut (dengan sensor pembaca nomor kereta api dan
sensor posisi). Setelah terbaca, maka mikrokontroler pada stasiun kereta api akan
menampilkan data berupa nomor kereta api, asal kereta api di LCD. Data yang
ditampilkan pada LCD
juga dikirimkan ke stasiun yang lain dan ditampilkan pada
LCD. Ketika kereta api meninggalkan stasiun kereta api, maka stasiun
mikrokontroler akan menampilkan data asal kereta api dan tujuan kereta api di
LCD. Sama seperti ketika kereta api masuk ke stasiun kereta api data yang
ditampilkan pada LCD
juga dikirimkan ke stasiun yang lain dan ditampilkan pada
penampil
LCD
.
Sensor Posisi 1
Sensor Posisi 2
Sensor Posisi 3
Sensor Posisi 4
Sensor Pembaca
Nomor KA Kedua
Mikrokontroler
AT89S51
Stasiun A
Stasiun B
Stasiun C
Komunikasi Serial
Sensor Pembaca
Nomor KA Pertama
32
Gambar 3. 1
Diagram blok “Sistem Identifikasi Keberadaan Kereta Api”
3.2. Perancangan Perangkat Keras
3.2.1. Konstruksi Jalur Kereta Api
Gambar 3.2 memperlihatkan konstruksi jalur kereta api yang digunakan.
Keterangan :
: Sensor Pembaca Nomor KA Pertama
: Sensor Pembaca Nomor KA Kedua
: Sensor Posisi 1
: Sensor Posisi 2
: Sensor Posisi 3
: Sensor Posisi 4
Terlihat bahwa jalur kereta api yang digunakan adalah melingkar. Pada
jalur kereta api terdapat tiga buah stasiun kereta api dan di setiap stasiun terdapat
percabangan sehingga memungkinkan setiap stasiun dapat dilewati kereta api dari
arah yang berlawanan.
3.2.2. Rangkaian Nomor Kereta Api, Sensor Pembaca Nomor Kereta Api,
dan Sensor Posisi
Pada setiap stasiun terdapat empat buah sensor posisi dan dua sensor
pembaca nomor kereta api. Sensor pembaca nomor kereta api berfungsi untuk
membaca nomor identitas kereta api, sensor ini dibentuk oleh sensor optis berupa
fototransistor dan dengan sumber cahaya berupa IRED. Sensor posisi berfungsi
untuk menginformasikan keberadaan kereta api dan sensor ini dibentuk oleh
optocoupler
juga merupakan sensor optis gabungan dari fototransistor dan IRED
dalam kemasan yang sudah jadi satu.
3.2.2.1. Rangkaian Nomor Kereta Api dan Sensor Pembaca Nomor Kereta
Api
Setiap stasiun kereta api terdapat dua sensor pembaca nomor nomor kereta
api, setiap sensor dibentuk oleh tiga buah fototransistor. Sumber cahaya
menggunakan 3 buah IRED yang terpasang pada kereta api. Sehingga
fototransistor pada stasiun kereta api akan membaca informasi dari kereta api
34
3.2.2.1.1. Rangkaian Nomor Kereta Api
Pada perancangan rangkaian nomor kereta api digunakan IRED
dengan
tipe
QED 233 . IRED
QED 233 ini (dari
datasheet
) mempunyai karakteristik
dengan arus maju (I
D) maksimal sebesar 100 mA, dengan tegangan maju 1,6 V.
Dengan menggunakan persamaan 2.1 dapat diperoleh niai R
dminimum yang
diijinkan, yaitu :
Ω
=
×
−
=
−34
10
100
6
,
1
5
3
d
R
Pada perancangan ini digunakan tegangan dari catu daya sebesar 5 Volt
dan nilai I
Dyang dipakai pada perancangan ini sebesar 15mA. Alasan digunakan
arus I
D15 mA karena intensitas cahaya inframerah yang dibutuhkan untuk
mengaktifkan fototransistor kecil, karena jarak antara
IRED
dan fototransistor + 2
cm. Untuk memperoleh nilai resistor yang akan digunakan, diperoleh dengan
persamaan 2.1 :
Ω
≅
Ω
=
×
−
=
−293
,
333
220
10
15
6
,
1
6
3
d
R
Gambar rangkaian IRED yang digunakan pada rangkaian nomor kereta api
terlihat pada gambar 3.3.
Gambar 3.4 memperlihatkan posisi rangkaian IRED pada kereta api.
Gambar 3.4
Posisi rangkaian IRED pada kereta api
Nomor kereta api ditentukan dengan kombinasi nyala (
on
) dari 3 IRED
yang menempel pada kereta api. Misal untuk kereta api nomor 1, maka IRED 3
off
, IRED 2
off
, dan IRED 1
on.
Sedangkan untuk kereta api nomor 2, maka IRED
3 off, IRED 2
on
, dan IRED 1 off. Untuk nomor kereta api yang lain dapat dilihat
kombinasi nyala IRED pada tabel 3.1.
Tabel 3.1
Kombinasi nyala IRED
IRED 3
IRED 2
IRED 1
Nomor Kereta Api
off Off
on
1
off On
off
2
off On
on
3
on Off
off
4
on Off
on
5
on On
off
6
36
3.2.2.1.2. Sensor Pembaca Nomor Kereta Api
Fototransistor yang digunakan pada perancangan ini adalah fototransistor
tipe
UT6W95-AE-0125 (NPN). Dari
datasheet
diperoleh besarnya arus yang
dibutuhkan fototransistor pada keadaan
on
adalah Ic = 0,1mA, V
CE SAT= 0,4 V.
Pada perancangan ini digunakan I
c= 500
μ
A, sehingga dengan menggunakan
persamaan 2.4 dapat diketahui nilai R
C:
Ω
≅
Ω
=
×
−
=
−K
R
C9200
10
10
500
4
,
0
5
6
Karena nilai resistor 9200
Ω
tidak terdapat di pasaran, maka dipilih nilai
yang mendekati 9200
Ω
, yaitu 10K
Ω
. Gambar 3. 5 memperlihatkan rangkaian
fototransistor yang digunakan dalam perancangan, dan gambar 3. 6
memperlihatkan posisi rangkaian fototransistor pada stasiun kereta api.
Gambar 3. 6
Posisi rangkaian fototransistor pada stasiun kereta api
3.2.2.2. Sensor Posisi
Terdapat empat sensor posisi pada tiap stasiun kereta api, dimana dua
sensor posisi sebagai sensor masuk dan sensor keluar, dua yang lain juga sebagai
sensor masuk dan sensor keluar pada arah yang berlawanan. Sensor posisi ini
memiliki perhitungan yang sama dengan sensor pembaca nomor kereta api.
Kemasan sensor yang dipakai berbeda untuk sensor pembaca nomor kereta api
kemasan IRED dan fototransistor terpisah sedangkan untuk sensor posisi
menggunakan
optocoupler
.
Optocoupler
adalah fototransistor dan IRED yang
dikemas menjadi satu.
Untai
optocoupler
yang dipakai dalam sistem sebagai sensor posisi
38
Gambar 3. 7.
Rangkaian
optocoupler
Pada perancangan kali ini
optocoupler
yang digunakan adalah H213A.
Optocoupler
tipe H213A bagian
input
(IRED) memiliki karakteristik yang sama
dengan IRED QED 233 yang digunakan pada rangkaian nomor kereta api.
Sehingga perhitungan untuk bagian
input optocoupler
dapat dilihat pada bagian
3.2.2.1.1.
Pada perancangan untuk bagian
output
-nya (bagian fototransistor) sama
dengan perancangan pada perancangan fototransistor sensor pembaca nomor
kereta api digunakan I
c= 500
μ
sehingga nilai R
Cpada fototransistor
optocoupler
adalah 10K
Ω
.
Gambar 3. 8 memperlihatkan posisi
optocoupler
sebagai sensor posisi
Gambar 3. 8
Posisi
optocoupler
pada stasiun kereta api
3.2.2.3. Rangkaian Schmitt Trigger
Output
dari fototransistor baik pada sensor posisi dan sensor pembaca
nomor kereta api masuk ke rangkaian
Schmitt trigger
. Rangkaian ini berfungsi
untuk mengubah gelombang sinus menjadi gelombang kotak sebelum masuk ke
port
mikrokontroler AT89S51. Jadi
output
dari rangkaian
schmit trigger
merupakan kebalikan dari
input
yang masuk ke dalam
schmit trigger
. Gambar 3.9
(a) memperlihatkan rangkaian
Schmitt trigger
yang digunakan untuk sensor
posisi dan gambar 3.9 (b) memperlihatkan rangkaian
Schmitt trigger
yang
digunakan untuk sensor pembaca nomor identitas kereta api.
40
(b)
Gambar 3. 9
(a) Rangkaian
Schmitt trigger
untuk sensor posisi dan (b) Rangkaian
Schmitt trigger
untuk sensor pembaca nomor identitas kereta api.
3.2.3. LCD
LCD (
Liquid Cristal Display
) digunakan untuk menampilkan data nomor
kereta api dan posisi kereta api. LCD yang digunakan memiliki 2 baris dengan
kemampuan menampilkan 16 karakter tiap baris. Baris pertama digunakan untuk
menampilkan nama stasiun kereta api, sedangkan baris kedua digunakan untuk
menampilkan data nomor kereta api dan posisi kereta api yang terbaca. Gambar
3.10 memperlihatkan desain penampilan dari LCD yang digunakan. Gambar 3. 11
memperlihatkan gambar rangkaian LCD pada mikrokontroler.
Karakter yang ditampilkan dimulai dari sisi sebelah kiri agar dapat terbaca
dengan mudah oleh pengguna. LCD dapat menampilkan semua karakter ASCII
dan simbol, dan dapat menerima karakter ASCII langsung tanpa perlu
dikonversikan, sehingga data yang dikirim oleh mikrokontroler adalah data berupa
karakter ASCII.
NAMA STASIUN KERETA API
NOMOR DAN POSISI KERETA API
Gambar 3.11
Rangkaian LCD pada Mikrokontroler
3.2.4. Bagian Komunikasi Serial RS-485
Pada perancangan “Sistem Identifikasi Keberadaan Kereta Api” terdapat
tiga buah stasiun kereta api. Setiap stasiun kereta api memiliki sebuah
mikrokontroler AT89S51, masing-masing mikrokontroler dari setiap stasiun
kereta api dilengkapi dengan rangkaian komunikasi serial RS-485. Setiap
mikrokontroler AT89S51 dari stasiun kereta api mampu mengirimkan dan
menerima data serial secara bergantian. Gambar 3. 12 memperlihatkan rangkaian
42
Gambar 3. 12
Rangkaian sistem komunikasi RS-485
3.2.4.1. IC Komunikasi Serial RS-485
Komponen utama yang digunakan pada komunikasi serial standar RS-485
adalah IC RS-485. Ada berbagai seri IC RS-485 yang dikeluarkan pabrik
elektronika antara lain SN75176 yang merupakan seri 7517x buatan
Texas
Instrument
, DS36C278 buatan
National Semiconductor
, dan seri MAX48x,
MAX1487 buatan
MAXIM
Semiconductor
. Di perancangan ini menggunakan IC
SN75176. Pada gambar 3. 13 memperlihatkan IC RS-485 mempunyai 8 pin.
3.2.4.2. Konfigurasi Jaringan
Sistem yang akan dibuat menggunakan konfigurasi jaringan
multidrop
2
kabel dan setiap mikrokontroler dari masing-masing stasiun kereta api dapat
mengirimkan dan menerima data serial secara bergantian. Gambar 3.14
memperlihatkan rangkaian RS-485 dengan konfigurasi
multidrop
2 kabel.
Gambar 3. 14
Rangkaian RS-485 dengan konfigurasi
multidrop
2 kabel
3.2.4.3. Komponen Penyesuai Impedansi
Agar sinyal data yang dikeluarkan dari masing-masing mikrokontroler
dapat diterima dengan sempurna oleh mikrokontroler yang lain dan tidak terjadi
feedback,
maka diperlukan penyesuai impedansi pada jaringan. Penyesuai
impedansi yang digunakan pada rangkaian ini yaitu sistem
parallel termination.
Parallel termination
yaitu memasangkan resistor secara paralel pada kabel
44
kabel jaringan yang tertera pada lembar data kabel
UTP
(
Unshielded Twisted
Pair
). Gambar 3. 15 memperlihatkan komponen penyesuai impedansi.
Gambar 3. 15
Komponen penyesuai impedansi
3.2.4.4. Pemberian Prasikap pada Jaringan
Pemberian prasikap tegangan pada jaringan baik prasikap positif maupun
prasikap negatif dimaksudkan untuk menghindari keadaan sinyal yang tidak
menentu saat tidak ada data (keadaan menunggu/
idle
). Pemberian prasikap ini
dengan cara memasangkan resistor prasikap antara
line
B dengan
ground
dan
resistor antara
line
A dengan V
CC(+5V).
Sistem komunikasi yang akan dirancang memiliki konfigurasi :
1.
Memiliki 2 resistor penyesuai impedansi 100
Ω
, yang akan dipasangkan
paralel dengan rangkaian RS-485.
2.
Impedansi tiap rangkaian komunikasi RS-485 sebesar 12K
Ω
baik untuk
pengirim maupun penerima (
RS-422 And RS-485 Application Note
3.
Direncanakan ada 3 rangkaian komunikasi serial RS-485 (semua adalah
master
).
4.
Suplai tegangan 5V dengan amplitudo sinyal minimal +200mV.
5.
Maka nilai nilai resistansi prasikap dihitung sebagai berikut:
-
Jumlah beban keseluruhan 3 rangkaian, masing-masing nilai
impedansinya 12K
Ω
dan dirangkai secara paralel sehingga jumlah
beban adalah
3 2 11
1
1
1
R
R
R
R
beban+
+
=
3 3 310
12
1
10
12
1
100
12
1
1
×
+
×
+
×
=
bebanR
310
12
3
1
×
=
bebanR
Ω
=
K
R
beban4
-
Jumlah beban dirangkai paralel dengan 2 resistor penyesuai
impedansi 100
Ω
, maka hasilnya
pi pi beban
total
R
R
R
R
1
1
1
1
=
+
+
100
1
100
1
10
4
1
1
3
+
+
×
=
totalR
310
4
81
1
×
=
totalR
81
10
4
×
3=
total
R
Ω
=
49
,
383
total46
-
Dengan nilai amplitudo sinyal minimal 200mV (perhitungan nilai
minimal positif), dibagi dengan nilai beban 49,383K
Ω
, maka arus
yang dihasilkan adalah
383
,
49
10
200
×
−3=
I
mA
I
=
4
,
05
-
Untuk menciptakan arus prasikap sebesar 4,05mA dengan
tegangan catu 5V, maka resistor yang dibutuhkan sebesar
3
10
05
,
4
5
−
×
=
R
Ω
=
1234
,
5679
R