Prapengolahan
Ekstraksi Ciri Algoritma Pengenalan / KlasifikasiCitra
Klasifikasi BAB 2 LANDASAN TEORIPada bab ini akan membahas landasan atas teori-teori yang bersifat ilmiah untuk mendukung penulisan skripsi ini. Teori-teori yang dibahas mengenai pengenalan pola, pengolahan citra, pengenalan pola sidik jari, dan jaringan saraf tiruan serta beberapa sub pokok pembahasan lainnya yang menjadi landasan dalam penulisan skripsi ini.
2.1 Pengenalan pola
Pola adalah entitas yang terdefinisi dan dapat didefinisikan melalui ciri-cirinya (feature). Ciri-ciri tersebut digunakan untuk membedakan satu pola dengan pola yang lain. Dengan kata lain pengenalan pola dapat membedakan satu objek dengan objek lain.
Struktur sistem pengenalan pola ditunjukkan pada gambar 2.1. Sistem pengenalan pola ini terdiri dari suatu sensor (misalnya kamera, dan scanner), teknik prapengolahan, suatu algoritma atau mekanisme ekstraksi ciri dan algoritma untuk klasifikasi atau pengenalan (bergantung pada pendekatan yang dilakukan). Sebagai tambahan, biasanya beberapa data yang sudah diklasifikasikan diasumsikan telah tersedia untuk melatih sistem.
Prapengolahan meliputi transformasi masukan (input) data mentah untuk membantu kemampuan komputasional dan pencarian ciri. Pada prapengolahan, citra yang ditangkap oleh sensor akan dinormalisasi agar citra menjadi lebih siap untuk diolah pada tahap pemisahan cirri.
Klasifikasi merupakan tahap untuk mengelompokkan data masukan pada satu atau beberapa kelas berdasarkan hasil pencarian beberapa ciri yang signifikan dan pemrosesan atau analisis terhadap ciri itu. Setiap kelas terdiri dari sekumpulan objek yang memiliki kedekatan (kemiripan) ciri (Putra, 2009).
2.2 Pengenalan Pola Sidik Jari
Pengenalan sidik jari dianggap sebagai metode yang paling tua di antara jajaran teknologi biometrik lain yang ada, tetapi tidak dapat disangkal teknologi ini merupakan yang paling populer digunakan pada saat ini. Sidik jari memiliki banyak kelebihan dalam berbagai hal yang membuat biometrik ini lebih nyaman dan aman. Kelebihan dari biometrik pengenalan sidik jari didukung dengan beberapa hal, seperti (Maltoni, 2003) :
1. Parennial nature, yaitu guratan-guratan pada sidik jari yang melekat pada kulit manusia seumur hidup
2. Immutability, yaitu sidik jari seseorang tidak pernah berubah kecuali mendapatkan kecelakaan yang serius
3. Individuality, yaitu pola sidik jari adalah unik dan berbeda untuk setiap orang.
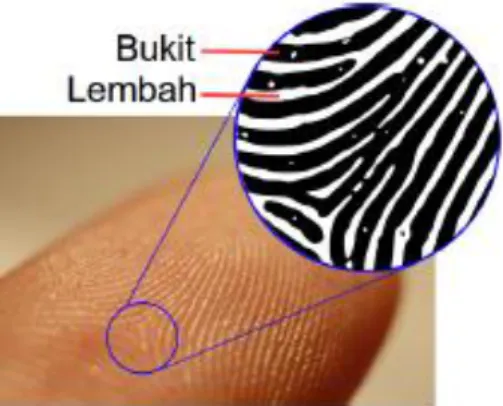
Pada sidik jari manusia bagian yang menonjol atau yang berupa guratan disebut bukit (ridge), dan bagian yang tidak menonjol yang memisahkan bagian yang menonjol satu dengan yang lain disebut dengan lembah (valley) (Maltoni, 2003). Gambar 2.2 memperlihatkan sidik jari, bukit dan lembah pada sidik jari tersebut.
Gambar 2.2 Sidik Jari
Ciri sidik jari dapat dibedakan menjadi tiga level yaitu (Maltoni,2003),: 1. Level 1: berada pada level global
Aliran garis bukit akan membentuk sebuah pola yang mirip dengan salah satu dari Gambar 2.3.
2. Level 2: berada pada level local
Terdapat 150 perbedaan pada karakteristik lokal. Pada level ini karakteristik dari sidik jari disebut dengan minutiae details. Dua karakteristik bukit yang paling banyak digunakan adalah ridge ending dan ridge bifurcation yang disebut dengan minutiae seperti lingkaran hitam pada Gambar 2.4.
3. Level 3: berada pada level very-fine
Pada level ini dilihat ciri dari bukit seperti lebar, bentuk, kurvatur, kontur tepian dan detail. Terdapat finger sweat pore seperti ditunjukkan lingkaran kosong pada Gambar 2.4. Namun, jika ingin menggunakan ciri pada level ini hanya dimungkinkan jika citra sidik jari diambil pada resolusi 1000dpi dengan kualitas citra yang sangat baik.
(a) left-loop (b) right-loop (c) whorl (d) arch (e) tented-arch
Gambar 2.3 Karakteristik Ciri Sidik Jari level 1 (Maltoni et.al, 2003)
Gambar 2.4 Karakteristik Ciri Sidik Jari Level 2 dan 3, lingkaran hitam untuk
minutiae dan lingkaran kosong untuk sweat pore (Maltoni et al, 2003)
Ada beberapa kualitas dari citra sidik jari yang sangat berpengaruh terhadap ekstraksi ciri dari citra sidik jari dan yang selanjutnya akan berpengaruh pada hasil pencocokan citra sidik jari. Citra dikatakan baik, jika perbedaan lembah dan bukit terlihat jelas.
Berikut adalah beberapa gambar yang menunjukkan beberapa kualitas citra (Chikkerur et al.,2007):
(a) (b) (c) (d)
Gambar 2.5 Gambar (a) citra sidik jari dengan kualitas baik (b) lembah dan bukit
kurang dapat dibedakan dengan baik (c) dan (d) citra sidik jari yang kering (Chikkerur et al, 2007)
Beberapa kendala yang dihadapi peneliti dalam pencocokan citra sidik jari (Chikkerrur et al, 2007):
1. Kualitas citra yang rendah dapat memicu kesalahan pada ekstraksi ciri yang nantinya berdampak pada pencocokan.
2. Keterbatasan dalam representasi algoritma yang hanya dapat menggunakan salah satu dari informasi yang ditangkap manusia.
3. Ukuran sensor yang jauh lebih kecil dari ukuran sidik jari manusia, hal ini akan memicu ketidakarutan perekaman citra.
4. Adanya distorsi citra
5. Keterbatasan ukuran sensor yang mengakibatkan orang yang sama akan memiliki variasi yang berbeda pada tiap kali melakukan proses akuisisi
2.3 Pengolahan Citra Digital
Citra atau gambar merupakan sesuatu yang menggambarkan objek dan biasanya dalam bentuk dua dimensi. Citra merupakan suatu representasi kemiripan dari suatu objek atau benda. Citra digital didefinisikan sebagai representasi diskrit dari data spasial (tata letak) dan intensitas (warna) informasi (Solomon & Breckon, 2011).
Proses pengolahan citra adalah sebuah disiplin ilmu yang mempelajari hal-hal yang berkaitan dengan perbaikan kualitas gambar, transformasi gambar, melakukan pemilihan ciri citra untuk tujuan analisis dan mendapatkan kualitas citra yang lebih baik (Sutoyo, 2009). Tujuan dari pengolahan citra digital agar komputer memiliki sebuah penglihatan yang dapat melihat atau mengenali suatu objek gambar dengan jelas seperti selayaknya mata pada manusia.
Setelah diperoleh citra digital yang berupa pola bit-bit di dalam memori komputer, maka analisis dan pengolahan dapat dilakukan. Pengolahan citra selalu melibatkan satu atau bahkan lebih algoritma yang akan diimplementasikan terhadap citra.
Gambar 2.6 Representasi sistem koordinat citra
Berdasarkan representasi sistem koordinat citra pada gambar 2.5 citra dapat direpresentasikan dalam bentuk matriks dua dimensi dimana kolom pada matriks merepresentasikan lebar (width) pada citra, dan baris pada matriks merepresentasikan tinggi (height) pada citra.
𝑓 𝑥, 𝑦 = 𝑓(0,0) 𝑓 0,1 ⋯ 𝑓(0, 𝑖) 𝑓(1,0) ⋮ 𝑓(1,1) ⋯ ⋮ ⋱ 𝑓(1, 𝑖) ⋮ 𝑓(𝑗, 0) 𝑓(𝑗, 1) ⋯ 𝑓(𝑗, 𝑖) (2.1) dengan keterangan: j = height -1 i = width -1 2.3.1 Binerisasi (Thresholding)
Binerisasi digunakan untuk membedakan objek gambar dengan latar belakang pada gambar tersebut. Proses ini akan menghasilkan citra hitam putih yang bersih dari tingkat keabuan (grayscale), atau dengan kata lain metode ini mengkonversi citra gray-level ke citra bilevel (binary image). Untuk mendapatkan citra grayscale digunakan persamaan (2.2) berikut:
𝐼𝑔𝑟𝑎𝑦𝑠𝑐𝑎𝑙𝑒 𝑥, 𝑦 = 𝛼𝐼𝑐𝑜𝑙𝑜𝑢𝑟 𝑥, 𝑦, 𝑟 + 𝛽 𝐼𝑐𝑜𝑙𝑜𝑢𝑟 𝑥, 𝑦, 𝑔 + 𝛾𝐼𝑐𝑜𝑙𝑜𝑢𝑟 (𝑥, 𝑦, 𝑏) (2.2) height
width y
dengan keterangan: Igrayscale = citra grayscale
Icolour = citra RGB
(x,y) = koordinat citra
(x,y,c) = piksel pada kordinat (x,y), r untuk merah, b untuk biru dan g untuk hijau α, β, γ = koefisien
Pembobotan nilai koefisien ini (α, β dan γ) berdasarkan nilai dari respon mata manusia, biasanya koefisien ketiga nilai yang digunakan adalah 0.333 (Solomon & Breckon, 2011).
Setelah mendapatkan citra grayscale, citra biner dibentuk dengan teknik thresholding. Jika g (x, y) adalah sebuah nilai ambang (threshold) batas dari f(x, y) dengan nilai threshold T. Nilai T digunakan untuk memisahkan antara objek dengan background-nya, hasil threshold dapat ditulis sebagai berikut (Gonzales et al, 2004):
𝑔 𝑥, 𝑦 = 1 𝑓 𝑥, 𝑦 ≥ 𝑇 0, 𝑓 𝑥, 𝑦 < 𝑇
(2.3)
2.3.2 Deteksi Tepi
Deteksi tepi berfungsi mengidentifikasi garis batas suatu objek yang terdapat pada citra. Tepi sebuah citra merupakan daerah yang memiliki intensitas cahaya yang kuat. Hal ini merupakan indikasi untuk menuju proses pembacaan piksel selanjutnya. Mendeteksi tepi suatu citra secara signifikan akan menyaring informasi yang tidak berguna dengan tidak menghilangkan struktur penting dari citra tersebut dan mampu merepresentasikan objek-objek yang terkandung dalam citra tersebut meliputi bentuk, ukuran serta tekstur (Putra, 2009).
Biasanya operator yang digunakan untuk mendeteksi tepi adalah operator berbasis gradien yang menggunakan turunan pertama yaitu operator Robert, operator Sobel dan operator Prewitt.
Operator Sobel
Operator Sobel merupakan salah satu pengembangan dari teknik deteksi tepi sebelumnya, juga pengembangan dari operator Prewit. Operator ini berfungsi sebagai filter image. Filter ini mendeteksi keseluruhan tepi yang ada. Operator Sobel menggunakan matriks M x N dengan berordo 3 x 3, 5 x 5, 7 x 7, dan sebagainya. Matriks seperti ini digunakan untuk mempermudah mendapatkan piksel tengah sehingga menjadi titik tengah matriks (aij). Piksel tengah ini merupakan
piksel yang akan diperiksa. Cara pemanfaatan matriks ini sama seperti pemakaian sebuah grid, yaitu dengan cara memasukkan piksel-piksel disekitar yang sedang diperiksa (piksel tengah) ke dalam matriks. Cara yang demikian disebut spatial filtering.
a0 a1 a2
a7 (x,y) a3
a6 a5 a4
Gambar 2.7 Piksel bertetangga
Berdasarkan susunan piksel tetangga tersebut, besaran gradien yang dihitung menggunakan operator Sobel adalah:
𝑀 = 𝑆𝑥2+ 𝑆𝑦2 atau M= |sx|+ |sy| (2.4)
dimana M adalah besar gradien di titik tengah kernel dan turunan parsial dihitung menggunakan persamaan berikut:
Sx = (a2 + ca3 + a4) – (a0 + ca7 + a6) (2.5)
dimana c adalah konstanta yang bernilai 2. Sx dan Sy, dapat diimplementasikan
menjadi kernel berikut.
Gambar 2.8 Kernel Operator Sobel
Hasil akhir dari deteksi tepi sobel ini adalah ditemukannya beberapa piksel dengan intensitas yang lebih besar atau tajam. Maka setiap piksel kemungkinan hanya mempunyai dua warna dominan yaitu warna hitam dan putih.
2.3.3 Ekstraksi Ciri (Feature Extraction)
Feature extraction merupakan suatu metode untuk mendapatkan karateristik dari suatu citra (dalam hal ini citra tersebut merupakan sidik jari). Dengan feature extraction maka citra yang satu dengan yang lain dapat dibedakan dengan memperhatikan ciri yang terdapat pada citra itu sendiri. Pada penelitian ini, penulis menggunakan transformasi wavelet.
Prinsip kerja transformasi wavelet adalah menggunakan nilai rata-rata dari nilai input dan menyediakan semua informasi yang diperlukan agar dapat mengembalikan nilai input ke nilai semula (Putra, 2010). Pada transformasi wavelet diperlukan nilai selisih nilai input dan nilai rata-rata nilai input.
Pada pengembangan sinyal berdimensi dua misalnya citra dapat menggunakan filter bank untuk dekomposisi citra. Biasanya digunakan sebuah tapis low-pass (H) dan tapis high pass (G). Konvolusi citra dengan tapis low-pass menghasilkan citra pendekatan, sedangkan tapis high pass menghasilkan citra detil. Dekomposisi pola sidik jari ini dilakukan untuk mempresentasikan pola digit ke dalam vektor yang mengandung beberapa informasi mengenai pola tersebut. Setiap proses dekomposisi akan menghasilkan setengah ukuran dari citra sebelum dilakukan
-1 0 1 -2 0 2 -1 0 1 1 2 1 0 0 0 -1 -2 -1 Sy= Sx=
dekomposisi (Putra, 2010). Koefisien inilah yang kemudian menjadi basis input bagi jaringan saraf tiruan.
Adapun algoritma dari transformasi wavelet ini adalah:
1. Input citra yang diinginkan menjadi 4 bagian citra baru dengan ukuran 2N-1 x 2N-1
2. Citra dibagi kembali, ulangi langkah 1 untuk bagian kanan atas dari hasil citra wavelet pada langkah 1.
3. Pembagian berhenti jika nilai rata-rata citra adalah 1 piksel.
(a) (b)
(c) (d)
Pada gambar 2.9 ditampilkan transformasi wavelet pada citra. Citra semula dibagi (dekomposisi) menjadi 4 sub-image baru. Setiap sub-image ini berukuran ¼ kali dari citra asli, 3 sub-image posisi atas kanan, bawah kiri dan bawah kanan terlihat kasar sementara 1 sub-image atas kiri tampak seperti citra asli dan tampak lebih halus, yang dapat dibagi menjadi 4 sub-image baru lagi. Proses demikian dapat diulang
Gambar 2.9 Contoh transformasi wavelet pada citra (a) citra asli (b)
dekomposisi level 1 (c) dekomposisi level 2 (d) dekomposisi level 3 (Sumber: Putra, 2010)
sesuai level transformasi (dekomposisi) yang diinginkan. Hasil dekomposisi dapat dihitung dengan menggunakan rumus
𝑎 = 𝑆𝑖+ 𝑆𝑖+1
2
(2.10)
dan
ci = si - ai (2.11)
Variabel ai merupakan koefisien pendekatan, ci merupakan koefisien detil dan si
adalah himpunan bilangan yang akan didekomposisi.
2.4 Jaringan Saraf Tiruan
Jaringan Saraf Tiruan (JST) merupakan representasi buatan dari otak manusia yang selalu mencoba mensimulasikan proses pembelajaran pada otak manusia tersebut. Istilah buatan disini digunakan karena jaringan saraf ini diimplementasikan dengan menggunakan program komputer yang mampu menyelesaikan sejumlah proses perhitungan selama proses pembelajaran (Kusumadewi, 2003).
Jaringan Saraf tiruan dibentuk sebagai generalisasi model matematika dari jaringan saraf biologi dengan asumsi sebagai berikut (Siang, 2009):
1. Pemrosesan informasi terjadi pada banyak elemen sederhana (neuron). 2. Sinyal dikirimkan diantara neuron-neuron melalui penghubung-penghubung. 3. Penghubung antar neuron memiliki bobot yang akan memperkuat atau
memperlemah sinyal.
4. Untuk menentukan keluaran (output), setiap neuron menggunakan fungsi aktivasi yang dikenakan pada penjumlahan masukan (input) yang diterima. Besarnya keluaran (output) ini selanjutnya dibandingkan dengan suatu batas ambang.
2.4.1 Model Saraf (Neuron)
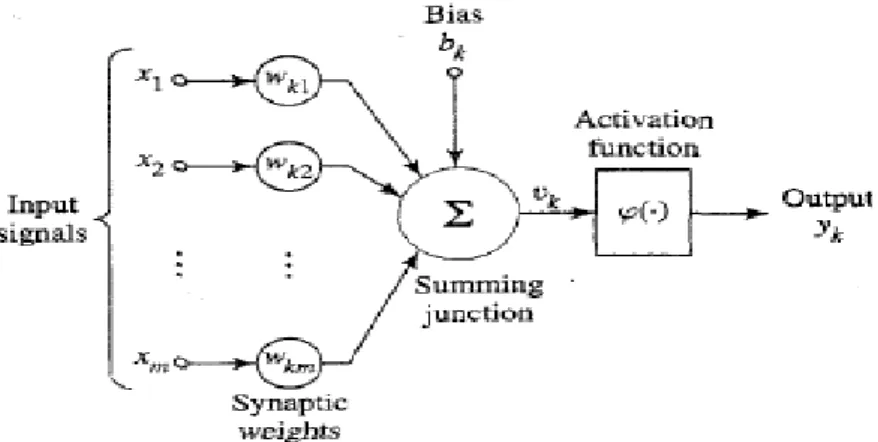
Sebuah neuron akan mempunyai banyak nilai masukan yang berasal dari neuron-neuron lain yang berhubungan dengan neuron-neuron tersebut dan akan menghasilkan sebuah nilai keluaran. Neuron tersebut akan berhubungan dengan neuron-neuron yang lain jika ada bobot-bobot yang menghubungkannya. Hal tersebut dapat digambarkan sebagai berikut:
Gambar 2.10 Model Neuron (Haykin, 1999)
Satu neuron terdiri dari tiga bagian dasar yaitu (Siang, 2009):
1 Himpunan unit-unit yang dihubungkan dengan jalur koneksi. Jalur-jalur tesebut memiliki bobot/ keluaran yang berbeda-beda. Bobot yang bernilai positif akan memperkuat sinyal dan yang bernilai negatif akan memperlemah sinyal yang dibawanya. Jumlah, struktur dan pola hubungan antar unit-unit tersebut akan menentukan arsitektur jaringan (dan juga model yang terbentuk). 2 Suatu unit penjumlahan yang akan menjumlahkan input-input sinyal yang
sudah dikalikan dengan bobotnya.
3 Fungsi aktivasi yang akan menentukan apakah sinyal dari input neuron akan diteruskan ke neuron lain ataukan tidak.
2.4.2 Arsitektur Jaringan Saraf Tiruan
Pembagian arsitektur jaringan saraf tiruan dapat dilihat dari kerangka kerja dan skema interkoneksi. Kerangka kerja jaringan saraf tiruan bisa dilihat dari jumlah lapisan
(layer) dan jumlah neuron pada setiap lapisan. Lapisan-lapisan penyusun jaringan saraf tiruan dapat dibagi menjadi tiga, yaitu (Heaton, 2008):
1. Lapisan Masukan (input layer)
Neuron-neuron di dalam lapisan masukan disebut input neuron, yang menerima input dari dunia luar. Input yang dimasukkan merupakan penggambaran dari suatu masalah.
2. Lapisan Tersembunyi (hidden layer)
Neuron-neuron yang berada dalam lapisan tersembunyi disebut hidden neuron. Penentuan jumlah neuron pada lapisan tersembunyi merupakan bagian yang sangat penting dalam arsitektur jaringan saraf tiruan.
Penggunaan neuron yang terlalu sedikit pada lapisan tersembunyi akan menghasilkan sesuatu yang disebut “underfitting”. Underfitting terjadi ketika hanya sedikit neuron pada hidden layer yang mampu mendeteksi signal pada sejumlah data yang rumit. Sedangkan, jumlah hidden neuron yang terlalu banyak juga dapat mengakibatkan beberapa masalah. Pertama, mengakibatkan jaringan mengalami overfitting, yaitu ketika jaringan memproses terlalu banyak informasi melebihi kapasitas. Kedua, mengakibatkan waktu proses pelatihan jaringan lebih lama (Heaton, 2008).
Menurut Haykin (1999) jumlah hidden neuron berada pada interval 1 sampai 9. Sedangkan, menurut Heaton (2008), ada beberapa aturan yang dapat digunakan untuk menentukan jumlah neuron yang akan digunakan pada lapisan tersembunyi, diantaranya adalah:
a. Jumlah hidden neuron harus berada diantara ukuran input neuron dan output neuron.
b. Jumlah hidden neuron harus 2 3 dari ukuran input neuron, ditambah ukuran output neuron.
Ketiga aturan diatas hanya berupa pertimbangan dalam menentukan arsitektur jaringan saraf tiruan. Bagaimanapun, penentuan arsitektur jaringan akan kembali pada trial and error.
3. Lapisan keluaran (output layer)
Neuron-neuron pada lapisan keluaran disebut output neuron. Keluaran dari lapisan ini merupakan keluaran jaringan saraf tiruan terhadap suatu permasalahan.
Gambar 2. 11 Arsitektur Jaringan Saraf Tiruan
Jaringan saraf tiruan propagasi balik menerapkan metode pelatihan yang terawasi yaitu metode pelatihan yang memberikan nilai target yang diinginkan dari setiap neuron pada lapisan keluaran. Puspitaningrum (2006, hal:125) menyatakan bahwa istilah “propagasi balik” atau “penyiaran kembali” diambil dari cara kerja jaringan ini, yaitu bahwa gradien error neuron-neuron lapisan tersembunyi diturunkan dari penyiaran kembali error-error yang diasosiasikan dengan neuron-neuron lapisan keluaran. Hal ini karena nilai target untuk neuron-neuron tersembunyi tidak diberikan.
Bias i N 1 1 j L Bias 1 k M . . . . . . . . . . . . . . . . . .
Input layer Lapisan Tersembunyi Lapisan Keluaran xp1 xpi XpN xpN M A S U K A N op1 opk opM K E L U A R A N
2.5 Algoritma Propagasi Balik
2.5.1 Proses Komputasi Propagasi Balik
Proses komputasi pada jaringan saraf propagasi balik dapat dibagi menjadi dua tahap yaitu komputasi maju (forward) dan komputasi mundur (backward) (Fausset,1994). Pada jaringan diberikan sekumpulan contoh pelatihan yang disebut set pelatihan. Set pelatihan terdiri dari vektor input dan vektor output target. Keluaran dari jaringan berupa sebuah vektor output aktual. Selisih antara vektor output target dan vektor output aktual merupakan kesalahan (error) yang terjadi. Kesalahan (error) ini yang dijadikan sebagai dasar dalam melakukan perubahan bobot yang ada dengan mempropagasikannya kembali (Puspitaningrum, 2006).
1. Komputasi maju (forward)
Pola masukan dihitung maju mulai dari lapisan masukan hingga lapisan keluaran menggunakan fungsi aktivasi yang ditentukan.
2. Komputasi mundur (backward)
Selisih antara target yang diinginkan dengan keluaran jaringan merupakan kesalahan yang terjadi. Kesalahan yang terjadi itu dipropagasi mundur. Dimulai dari garis yang berhubungan langsung dengan neuron-neuron di lapisan keluaran.
2.5.1.1 Komputasi maju (forward)
Komputasi maju pada jaringan saraf tiruan propagasi balik dimulai dari lapisan masukan, namun neuron yang mengalami komputasi adalah neuron pada lapisan tersembunyi. Hal ini disebabkan karena neuron pada lapisan masukan hanya berfungsi meneruskan nilai masukan untuk neuron pada lapisan tersembunyi. Pencarian nilai masukan pada lapisan tersembunyi dilakukan dengan perkalian antara masukan
dengan nilai bobot yang menghubungkan lapisan masukan dengan lapisan tersembunyi. Nilai masukan untuk lapisan tersembunyi adalah:
𝑧𝑗 = 𝑣𝑗 0+ 𝑥𝑖𝑣𝑗𝑖
𝑛
𝑖=0
(2.12)
Keterangan:
𝑧𝑗 = nilai masukan pada lapisan tersembunyi
𝑣𝑗𝑖 = bobot yang menghubungkan input layer dan lapisan tersembunyi
𝑥𝑖 = nilai keluaran dari neuron masukan ke neuron pada lapisan tersembunyi 𝑣𝑗 0 = bobot dari neuron bias ke neuron pada lapisan tersembunyi.
Dengan menggunakan nilai masukan pada lapisan tersembunyi (𝑖𝑧𝑗) ini, maka setiap neuron pada lapisan tersembunyi akan diaktifkan oleh fungsi aktivasi sehingga akan menghasilkan suatu nilai, nilai keluaran tersebut adalah:
𝑖𝑧𝑗 = 𝑓 (𝑧𝑗) (2.13)
Keterangan:
𝑖𝑧𝑗 = nilai keluaran neuron ke- j pada lapisan tersembunyi
𝑓 (𝑧𝑗) = fungsi aktivasi neuron ke-j pada lapisan tersembunyi.
Demikian juga halnya untuk mencari nilai pada lapisan keluaran. Pada lapisan keluaran proes komputasi sama seperti pada lapisan tersembunyi yaitu dengan menghitung nilai masukan dari setiap neuron k pada pada lapisan keluaran yang dirumuskan sebagai berikut:
𝑦𝑘 = 𝑤𝑘0+ 𝑧𝑗𝑤𝑘𝑗
𝑛
𝑖=0
(2.14)
Keterangan:
𝑦𝑘 = nilai masukan pada lapisan keluaran
𝑤𝑘𝑗 = bobot yang menghubungkan input layer dan lapisan tersembunyi
𝑧𝑗 = nilai keluaran dari neuron masukan ke neuron pada lapisan tersembunyi
Dengan menggunakan nilai masukan pada lapisan keluaran (𝑘) ini, maka setiap neuron pada lapisan keluaran akan diaktifkan oleh fungsi aktivasi sehingga akan menghasilkan nilai keluaran, nilai keluaran tersebut adalah:
𝑜𝑦𝑘 = 𝑓 (𝑦𝑘) (2.15)
Keterangan:
𝑜𝑦𝑘 = nilai keluaran neuron ke-k pada lapisan keluaran
𝑓 (𝑦𝑘) = fungsi aktivasi neuron ke-k pada lapisan keluaran.
Setelah diperoleh nilai keluaran aktual pada komputasi maju maka proses komputasi selanjutnya adalah proses komputasi mundur.
2.5.1.2 Komputasi mundur (backward)
Komputasi mundur pada jaringan saraf tiruan propagasi balik bertujuan untuk mendistribusikan kesalahan di unit yk (δk) ke semua unit pada lapisan tersembunyi
yang terhubung langsung dengan yk. Hal ini juga dilakukan untuk menghitung
kesalahan di unit zj(δj) di setiap unit di lapisan tersembunyi. Demikian seterusnya
sampai semua kesalahan di lapisan tersembunyi yang berhubungan langsung dengan unit keluaran.
2.5.1.3 Perbaharuan bobot
Setelah mendapatkan error, selanjutnya jaringan akan memperbaharui bobot menjadi bobot yang sesuai dari input yang dimasukkan menjadi output yang diinginkan. Untuk mencari bobot baru pada lapisan tersembunyi ke lapisan keluaran adalah:
𝑤𝑘𝑗 𝑏𝑎𝑟𝑢 = 𝑤𝑘𝑗 𝑙𝑎𝑚𝑎 + ∆𝑤𝑘𝑗 (2.16)
Sementara untuk mencari bobot baru pada lapisan masukan ke lapisan tersembunyi adalah:
2.5.2 Perhitungan Error
Pada tahap pembelajaran dalam algoritma propagasi balik, diperlukan suatu kondisi untuk menghentikan proses pembelajaran dan sebagai pengukuran keakurasian jaringan dalam mengenali pola yang diberikan. Ada beberapa perhitungan error yang digunakan yaitu Mean Squared Error (MSE), Mean Absolute Error (MAE) dan Mean Absolute Percentage Error (MAPE).
1. Mean Squared Error (MSE) adalah error rata-rata kuadrat dari selisih antara output jaringan dengan output target. Tujuannya adalah memperoleh nilai error sekecil mungkin secara iteratif dengan mengganti nilai bobot yang terhubung pada semua neuron pada jaringan. Rumus perhitungan MSE adalah sebagai berikut: 𝑀𝑆𝐸 = 1 2 (𝑡𝑘 − 𝑜𝑦𝑘) 2 𝑁 𝑖=1 (2.18) Keterangan:
𝑡𝑘 = nilai output target
𝑜𝑦𝑘 = nilai output sistem
2. Mean Absolute Error (MAE) merupakan perhitungan error hasil absolute dari selisih antara nilai hasil sistem dengan nilai aktual. Rumus perhitungan MAE adalah sebagai berikut:
𝑀𝐴𝐸 = 1
𝑁 |𝑡𝑘 − 𝑜𝑦𝑘|
𝑁
𝑖=1
(2.19)
3. Mean Absolute Percentage Error (MAPE) yang hampir sama dengan MAE, namun hasilnya dinyatakan dalam bentuk persentase. Rumus perhitungan MAPE adalah sebagai berikut:
𝑀𝐴𝑃𝐸 = 1
𝑁 𝑡𝑘 − 𝑜𝑦𝑘 × 100%
𝑁
𝑖=1
2.5.3 Optimalitas Arsitektur Jaringan Saraf Tiruan Propagasi Balik
Masalah utama yang terdapat dalam propagasi balik ialah lamanya proses iterasi yang dilakukan. Propagasi balik tidak dapat memastikan berapa epoch yang harus dilalui sampai pola yang diinginkan terpenuhi. Oleh karena itu terdapat beberapa cara yang digunakan untuk mengoptimalkan proses iterasi (Siang, 2009), yaitu:
2.5.3.1 Pemilihan bobot dan bias awal
Bobot awal merupakan unsur yang terpenting dalam pembentukan jaringan yang baik, karena bobot awal mempengaruhi kecepatan iterasi jaringan dalam mengenali pola. Bobot yang menghasilkan nilai fungsi aktivasi kecil sedapat mungkin dihindari karena akan menyebabkan perubahan bobotnya menjadi sangat kecil sehingga penurunan error menjadi kecil. Bobot awal standar yang biasa dipakai dalam melakukan proses komputasi dinilai memberikan waktu yang lama. Inisialisasi Nguyen Widrow merupakan modifikasi sederhana bobot-bobot dan bias ke unit tersembunyi yang mampu meningkatkan kecepatan jaringan dalam proses pelatihan jaringan. Inisialisasi Nguyen Widrow didefinisikan dengan persamaan:
𝛽 = 0.7 𝑝𝑛
Keterangan:
n = jumlah neuron pada lapisan input
p = jumlah neuron pada lapisan tersembunyi β = faktor skala
(2.21)
Prosedur inisialisasi Nguyen Widrow ialah:
a. Inisialisasi bobot-bobot (vji) lama dengan bilangan acak dalam interval [-0.5,
0.5] b. Hitung
∥ 𝑣𝑗 ∥= 𝑣𝑗 12+ 𝑣𝑗 22 + ⋯ + 𝑣𝑗𝑛2
(2.22)
𝑣𝑗𝑖 = 𝛽𝑣𝑗𝑖 𝑙𝑎𝑚𝑎 ∥ 𝑣𝑗 ∥
(2.23)
d. Bias baru yang dipakai sebagai inisialisasi vj0 = bilangan acak dalam interval
– 𝛽, 𝛽 (2.24)
2.5.3.2 Laju Pembelajaran ( learning rate)
Penggunaan parameter learning rate memiliki pengaruh penting terhadap waktu yang dibutuhkan untuk tercapainya target error yang diinginkan. Jika nilai learning rate yang digunakan terlalu kecil maka terlalu banyak epoch yang dibutuhkan untuk mencapai nilai target yang diinginkan.
Semakin besar nilai learning rate yang digunakan maka proses pelatihan jaringan akan semakin cepat, namun jika terlalu besar justru akan mengakibatkan algoritma menjadi tidak stabil dan menyebabkan nilai error berbolak balik pada nilai tertentu, sehingga mencegah tercapai target error yang diinginkan. Oleh karena itu pemilihan nilai learning rate harus seoptimal mungkin agar didapat proses pelatihan yang cepat (Siang, 2009).
2.5.3.3 Momentum
Penambahan parameter momentum dalam tahap pengoreksian nilai bobot dapat mempercepat proses pelatihan yaitu dengan memodifikasi nilai bobot pada iterasi (t+1) yang nilainya ditentukan oleh nilai bobot pada iterasi ke-t dan (t-1). 𝛽 adalah konstanta yang menyatakan parameter momentum yang nilainya 0 ≤𝛽 ≤1 keluaran (Siang, 2009):
Perubahan bobot dengan menggunakan momentum pada lapisan keluaran:
wkj 𝑡 + 1 = wkj 𝑡 + 𝛼𝛿𝑘 𝑧𝑗 + 𝛽 (wkj t − wkj (t − 1) (2.25)
Perubahan bobot dengan menggunakan momentum pada lapisan tersembunyi:
2.5.3.4 Faktor Proporsional
Jaringan saraf tiruan propagasi balik yang selama ini digunakan untuk berbagai macam aplikasi adalah jaringan saraf propagasi balik yang standar yang hanya menggunakan kedua faktor di atas (learning rate dan momentum).
Pada penelitian ini digunakan faktor ketiga yang disebut sebagai faktor proporsional ( ). Faktor proporsional ini pertama sekali diperkenalkan dan digunakan pada permasalahan XOR (Zweiri et al, 2003). Modifikasi terhadap jaringan saraf propagasi balik dengan menambahkan faktor ketiga yang disebut faktor proporsional akan menyebabkan bertambahnya satu konstanta baru yang menyertainya, konstanta tersebut adalah e(w(t)). Untuk mendapatkan nilai e(w(t)) maka dapat digunakan rumus berikut ini (Zweiri et al, 2003):
e w t( ( )) ek (2.27)
dimana 𝑒𝑘 = 𝑁 (𝑡𝑘 −𝑦𝑘 )
𝑖=1 (2.28)
𝑒𝑘 adalah selisih antara nilai target dengan output
Faktor ketiga tersebut menyebabkan perubahan bobot pada lapisan keluaran akan menjadi
wkj 𝑡 + 1 = 𝛼𝛿𝑘 𝑧𝑗 + 𝛽 t − 1 + γek (2.29)
Sedangkan perubahan bobot pada lapisan tersembunyi akan menjadi
vji 𝑡 + 1 = 𝛼𝛿𝑘 𝑥𝑖 + 𝛽 t − 1 + γek (2.30)
Dengan adanya faktor ketiga yang disebut faktor proporsional, maka saat ini pada jaringan saraf propagasi balik telah ada 3 faktor yang dapat diteliti untuk mendapatkan kinerja yang diinginkan.
2.5.4 Fungsi Aktivasi
Fungsi aktivasi merupakan bagian penting dalam tahap perhitungan JST karena dipakai untuk menentukan keluaran dari suatu neuron. Peran fungsi aktivasi pada jaringan saraf tiruan adalah untuk mengaktifkan keluaran dari jaringan dan menentukan apakah sinyal dari input neuron akan diteruskan ke neuron lain atau tidak. Beberapa fungsi aktivasi yang dipakai dalam JST adalah:
2.5.4.1 Fungsi sigmoid biner (logsig)
Fungsi sigmoid biner memiliki range nilai [0,1]. Oleh karena itu, fungsi ini sering digunakan untuk Jaringan Saraf yang membutuhkan nilai output yang terletak pada interval 0 sampai 1. Fungsi sigmoid biner dirumuskan sebagai:
𝑓 𝑥 = 1
1 + 𝑒−𝑥
(2.31)
dengan 𝑓′ 𝑥 = 𝑓 𝑥 (1 − 𝑓 𝑥 ) (2.32)
2.5.4.2 Fungsi sigmoid bipolar (tansig)
Fungsi sigmoid bipolar hampir sama dengan fungsi sigmoid biner, hanya saja fungsi ini memiliki range antara 1 sampai -1. Fungsi sigmoid bipolar dirumuskan sebagai:
𝑓 𝑥 = 1 − 𝑒 −𝑥 1 + 𝑒−𝑥 (2.33) dengan 𝑓′ 𝑥 =1 2 1 + 𝑓(𝑥) 1 − 𝑓(𝑥) (2.34)
2.6 K-Fold Cross Validation
Cross validation (validasi silang) merupakan metode untuk memperkirakan akurasi kesalahan dari data berdasarkan “resampling” (Sarle, 2004). K-Fold Cross Validation membagi data menjadi k subset yang ukurannya sama satu sama lainnya. Himpunan
yang dihasilkan yaitu S1, S2,…, Sk yang digunakan sebagai data pelatihan dan data
pengujian. Dalam metode ini, dilakukan iterasi sebanyak k kali. Setiap melakukan iterasi, salah satu subset dijadikan data uji, sedangkan subset lainnya sebagai data latih. K-fold cross validation akan mengulang pengujian sebanyak k kali, dan hasil pengukuran adalah nilai rata-rata dari k kali pengujian.
2.7 Penelitian Terdahulu
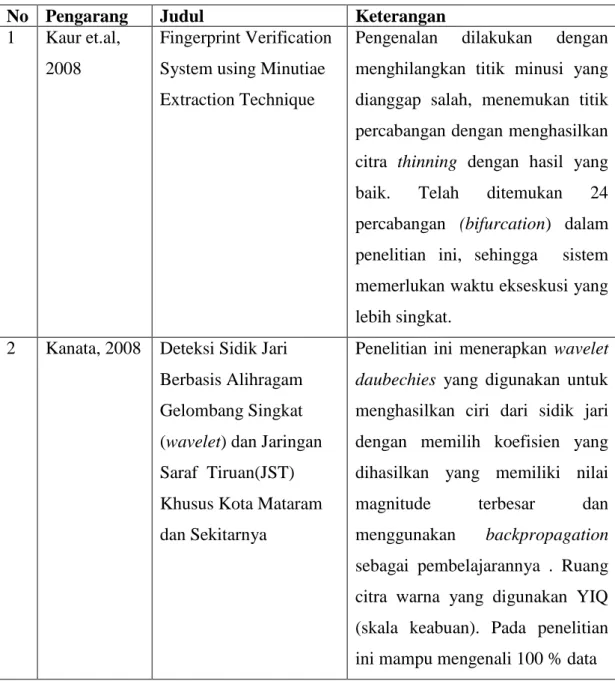
Tabel 2.1 Penelitian Terdahulu
No Pengarang Judul Keterangan
1 Kaur et.al, 2008
Fingerprint Verification System using Minutiae Extraction Technique
Pengenalan dilakukan dengan menghilangkan titik minusi yang dianggap salah, menemukan titik percabangan dengan menghasilkan citra thinning dengan hasil yang
baik. Telah ditemukan 24
percabangan (bifurcation) dalam penelitian ini, sehingga sistem memerlukan waktu ekseskusi yang lebih singkat.
2 Kanata, 2008 Deteksi Sidik Jari Berbasis Alihragam Gelombang Singkat (wavelet) dan Jaringan Saraf Tiruan(JST) Khusus Kota Mataram dan Sekitarnya
Penelitian ini menerapkan wavelet daubechies yang digunakan untuk menghasilkan ciri dari sidik jari dengan memilih koefisien yang dihasilkan yang memiliki nilai
magnitude terbesar dan
menggunakan backpropagation sebagai pembelajarannya . Ruang citra warna yang digunakan YIQ (skala keabuan). Pada penelitian ini mampu mengenali 100 % data
sidik jari yang pernah dilatihkan dan mampu menguji citra yang terdistorsi sebesar 70 %
3 Saraswat, 2010 An Efficient Automatic Attendance System Using Fingerprint Verification Technique
Pengenalan dilakukan dengan memperhatikan minusi sidik jari, menghilangkan titik minusi yang dianggap tidak perlu dan
menggunakan transformasi
fourier dalam perbaikan citranya. Hasil verifikasi sekitar 92 % dengan penggunaan waktu yang lebih singkat. 4 Pokhriyal et.al, 2010 Fingerprint Authentication using 2-D Wavelets
Pada penelitian ini
menggunakan wavelet dan
pseudo Zernike Moments. Wavelet digunakan untuk
mengurangi noise dan
mengekstraksi ridge.
Sedangkan pseudo Zernike moments digunakan untuk mengekstraksi fitur yang membawa informasi deskriptif mengenai citra sidik jari dan
sebagai pencocokannya
digunakan Euclidean distance 5 Barua et.al, 2011 Fingerprint
Identification
Penelitian ini menerapkan sistem identifikasi sidik jari online menggunakan minutiae based dengan melakukan beberapa tahapan yaitu deteksi tepi, thinning, ekstraksi fitur dan klasifikasi. Tahap praproses
meliputi binerisasi dan skeletonisasi ridge, yang dibutuhkan untuk klasifikasi. Fitur yang dinilai yaitu endpoint, percabangan (bifurcation), dan titik inti (core point) dari sidik jari, yang kemudian dilanjutkan dengan
penghapusan minusi yang
dianggap salah.
6 Reavindo, 2009 Pengaruh Faktor
Proporsional Pada
Jaringan Saraf
Propagasi Balik Untuk
Pengenalan Wajah
Berbasis Eigenface
Faktor pembelajaran ketiga yang disebut faktor proporsional (γ) digunakan pada penelitian ini untuk mengamati pengaruhnya pada pengenalan wajah berbasis eigenfaces. Pengaruh tersebut
dapat diukur melalui
perbandingan kinerja dari kedua jenis jaringan saraf propagasi balik tersebut. Kinerja jaringan yang digunakan sebagai acuan adalah kecepatan konvergensi
jaringan, kemampuan
memorisasi dan kemampuan
generalisasi jaringan. Melalui pengukuran terhadap kinerja tersebut, maka penelitian ini
menilai bahwa faktor
proporsional akan memperburuk kinerja jaringan saraf bila digunakan pada interval [0.1 , 0.9] dan [0.01 , 0.09] sedangkan pada interval [0.001 , 0.009]
akan memberikan kinerja yang baik.