2.1 Robot
Robot berasal dari kata robot yang berarti bekerja sendiri dan dalam bahasa Ceko (Negara Eropa Timur) berarti kerja paksa.Kata robot diperkenalkan pertama kali oleh Karel Capek seorang penulis dari Czech, Ceko pada tahun 1921. Karel Capek memperkenalkan kata robot kepada masyarakat dalam permainannya di drama pentas RUR (Rossum’s Universal Robot), yang diterbitkan pada tahun 1920 (Nurmaini, 2012).
2.1.1 Sejarah Robot
Sejarah robot bermula pada tahun 1938 ketika sistem otomatis dibuat oleh Jacques de Vaucanson, yang membuat bebek mekanik yang dapat memakan dan mencincang biji-bijian membuka dan menutup sayapnya. Pada tahun 1796, Hisashine Tanaga di Jepang membuat mainan mekanik yang dapat menghidangkan teh dan menulis huruf kanji. Nikola Tesla mendemonstrasikan perahu bot yang dapat dikontrol dengan radio pada tahun 1926. Tahun 1928, Makoto Nishimura seorang ahli biologi membuat robot pertama di Jepang yang bernama Gakutensoku. Robot ini dibuat di jepang dengan menggunakan teknologi barat dan diselesaikan pada tahun 1929 di Osaka,Gakutensoku bisa merubah ekspresi wajah dan mengerakkan kepala serta tangannya dengan menggunakan mekanisme tekanan udara.Robot ini memiliki panah sinyal berbentuk pena di tangan kanan dan lampu (Nurmaini, 2012).
berbicara dan berjalan layaknya manusia. Robot tersebut adalah salah satu jenis robot berdasarkan bentuknya yaitu kategori Android. Robot jenis ini berbentuk seperti kendaraan yang dilengkapi dengan roda dan bergerak seperti sebuah mobil. Humanoids, robot direkayasa untuk meniru bentuk manusia dan fungsi, telah menjadi semakin mampu dalam beberapa tahun terakhir. Misalnya, Albert Hubo, dari Korea Advanced Institut Sains dan Teknologi (KAIST), mampu berjalan, berjabat tangan, pegang benda, dan berbicara dengan ekspresi wajah realistis. The Kawada HRP2 humanoid dapat melakukan rumit tarian tradisional Jepang. Semua robot ini mempertunjukan dan bagaimanapun telah melakukan gerakan koreografi yang direncanakan yang memiliki program yang cermat sesuai dengan gerakan tangan (Grunberg, 2010).
2.1.2 Karakteristik Robot
Sebuah robot umumnya memiliki karakteristik sebagai berikut:
1. Sensing: Robot dapat mendeteksi lingkungan sekitarnya (halangan, panas, suara, danimage).
2. Mampu Bergerak: Robot umumnya bergerak dengan menggunakan kaki atau roda, dan pada beberapa kasus robot dapat terbang dan berenang.
3. Cerdas: Robot memiliki kecerdasan buatan agar dapat memutuskan aksi yang tepat dan akurat.
4. Membutuhkan Energi yang Memadai: Robot membutuhkan catu daya yang memadai.
2.1.3 Tipe Robot
Robot didesain dan dibuat sesuai kebutuhan pengguna. Robot, hingga saat ini, secara umum dibagi menjadi beberapa tipe sebagai berikut:
Robot manipulator biasanya dicirikan dengan memiliki lengan (arm robot). Robot ini biasanya diterapkan pada dunia industri, seperti pada industri otomotif, elektronik dan komputer. Sedangkan robot mobil mengarah ke robot yang bergerak, meskipun nantinya robot ini juga memiliki manipulator.
2.2 Arduino Uno R3
Arduino Uno R3 adalah papan pengembangan (development board) mikrokontroler yang berbasis chip ATmega328P. Disebut sebagai papan pengembangan karena board ini memang berfungsi sebagai arena prototyping sirkuit mikrokontroler. Dengan menggunakan papan pengembangan, anda akan lebih mudah merangkai rangkaian elektronika mikrokontroller dibanding jika anda memulai merakit ATMega328 dari awal dibreadboard. Bentuk dari mikrokontroler ATMega8 dapat dilihat pada Gambar 2.1.
Gambar 2.1 Arsitektur Arduino R3 ( Sumber : www.ecadio.com )
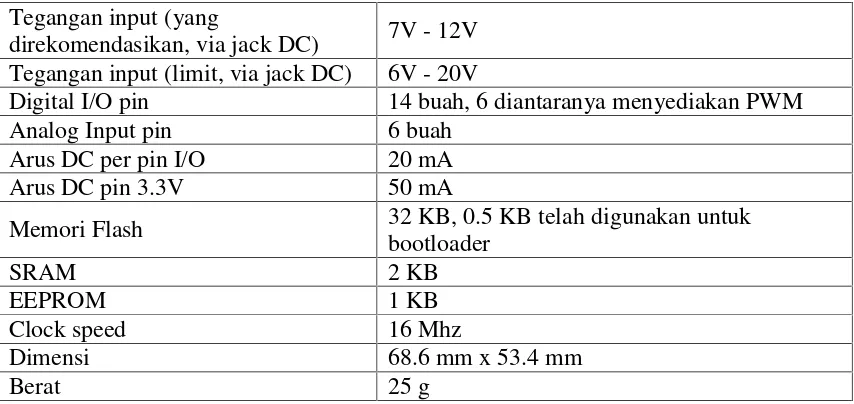
2.2.1 Spesifikasi
Adapun spesifikasi mikrokontroler Arduino R3 dapat dilihat seperti pada Tabel 2.1 dibawah ini
Chip mikrokontroller ATmega328P
Tegangan input (yang
direkomendasikan, via jack DC) 7V - 12V Tegangan input (limit, via jack DC) 6V - 20V
Digital I/O pin 14 buah, 6 diantaranya menyediakan PWM
Analog Input pin 6 buah
Arus DC per pin I/O 20 mA
Arus DC pin 3.3V 50 mA
Memori Flash 32 KB, 0.5 KB telah digunakan untuk bootloader
SRAM 2 KB
EEPROM 1 KB
Clock speed 16 Mhz
Dimensi 68.6 mm x 53.4 mm
Berat 25 g
Tabel 2.1 Spesifikasi Mikrokontroler Arduino R3
2.2.2 Proteksi
Development board Arduino Uno R3 telah dilengkapi dengan polyfuse yang dapat direset untuk melindungi port USB komputer/laptop anda dari korsleting atau arus berlebih. Meskipun kebanyakan komputer telah memiliki perlindungan port tersebut didalamnya namun sikring pelindung pada Arduino Uno memberikan lapisan perlindungan tambahan yang membuat anda bisa dengan tenang menghubungkan Arduino ke komputer anda. Jika lebih dari 500mA ditarik pada port USB tersebut, sirkuit proteksi akan secara otomatis memutuskan hubungan, dan akan menyambung kembali ketika batasan aman telah kembali.
2.2.3 Power supply
Board Arduino Uno dapat ditenagai dengan power yang diperoleh dari koneksi kabel USB, atau via power supply eksternal. Pilihan power yang digunakan akan dilakukan secara otomatis.
rangkaian bekerja dengan tidak sempurna. Jika diberi tegangan lebih dari 12V, regulator tegangan bisa over heat yang pada akhirnya bisa merusak pcb. Dengan demikian, tegangan yang di rekomendasikan adalah 7V hingga 12V.
Beberapapin powerpada Arduino Uno : • GND. Ini adalahgroundatau negatif.
• Vin. Ini adalah pin yang digunakan jika anda ingin memberikan power langsung ke board Arduino dengan rentang tegangan yang disarankan 7V -12V
• Pin 5V.Ini adalah pin output dimana pada pin tersebut mengalir tegangan 5V yang telah melalui regulator
• 3V3. Ini adalah pin output dimana pada pin tersebut disediakan tegangan 3.3V yang telah melalui regulator
• IOREF. Ini adalah pin yang menyediakan referensi tegangan mikrokontroler. Biasanya digunakan pada board shielduntuk memperoleh tegangan yang sesuai, apakah 5V atau 3.3V
2.2.4 Memori
Chip ATmega328 pada Arduino Uno R3 memiliki memori 32 KB, dengan 0.5 KB dari memori tersebut telah digunakan untuk bootloader. Jumlah SRAM 2 KB, dan EEPROM 1 KB, yang dapat di baca-tulis dengan menggunakan EEPROMlibrarysaat melakukan pemrograman.
2.2.5 Input dan output (i/o)
Seperti yang telah disebutkan sebelumnya, Arduino Uno memiliki 14 buah digital pin yang dapat digunakan sebagai input atau output, sengan menggunakan fungsi pinMode(), digitalWrite(), dan digital(Read). Pin-pin tersebut bekerja pada tegangan 5V, dan setiap pin dapat menyediakan atau menerima arus 20mA, dan memiliki tahanan pull-up sekitar 20-50k ohm (secara default dalam posisi disconnect). Nilai maximum adalah 40mA, yang sebisa mungkin dihindari untuk menghindari kerusakan chip mikrokontroler
Beberapa pin memiliki fungsi khusus :
• External Interrups, yaitu pin 2 dan pin 3. Kedua pin tersebut dapat digunakan untuk mengaktifkan interrups. Gunakan fungsi attachInterrupt().
• PWM: Pin 3, 5, 6, 9, 10, dan 11 menyediakan output PWM 8-bit dengan menggunakan fungsianalogWrite().
• SPI : Pin 10 (SS), 11 (MOSI), 12 (MISO), dan 13 (SCK) mendukung komunikasi SPI dengan menggunakan SPILibrary.
• LED : Pin 13. Pada pin 13 terhubung built-in led yang dikendalikan oleh digital pin no 13.
• TWI : Pin A4 (SDA) dan pin A5 (SCL) yang mendukung komunikasi TWI dengan menggunakanWire Library.
Arduino Uno memiliki 6 buah input analog, yang diberi tanda dengan A0, A1, A2, A3, A4, A5. Masing-masing pin analog tersebut memiliki resolusi 10 bits (jadi bisa memiliki 1024 nilai). Secara default, pin-pin tersebut diukur dari ground ke 5V, namun bisa juga menggunakan pin AREF dengan menggunakan fungsi analog Reference. Beberapa in lainnya padaboardini adalah :
• AREF. Sebagai referensi tegangan untukinputanalog.
• Reset. Hubungkan ke LOW untuk melakukan reset terhadap mikrokontroler. Sama dengan penggunaan tombolresetyang tersedia.
2.2.6 Komunikasi
Arduino Uno R3 memiliki beberapa fasilitas untuk berkomunikasi dengan komputer, berkomunikasi dengan Arduino lainnya, atau dengan mikrokontroler lain nya. Chip Atmega328 menyediakan komunikasi serial UART TTL (5V) yang tersedia di pin 0 (RX) dan pin 1 (TX). Chip ATmega16U2 yang terdapat pada board berfungsi menterjemahkan bentuk komunikasi ini melalui USB dan akan tampil sebagai Virtual Port di komputer. Firmware 16U2 menggunakan driver USB standar sehingga tidak membutuhkan driver tambahan.
I2C (TWI) dan SPI. Di dalam Arduino Software (IDE) sudah termasuk Wire Library untuk memudahkan anda menggunakan bus I2C. Untuk menggunakan komunikasi SPI, gunakan SPIlibrary.
2.3 Mikrokontroller ATMEGA328
ATMega328 adalah mikrokontroller keluaran dari atmel yang mempunyai arsitektur RISC (Reduce Instruction Set Computer) yang dimana setiap proses eksekusi data lebih cepat dari pada arsitektur CISC (Completed Instruction Set Computer).
Mikrokontroller ini memiliki beberapa fitur antara lain :
130 macam instruksi yang hampir semuanya dieksekusi
dalam satu siklusclock. 32 x 8-bit register serba guna.
Kecepatan mencapai 16 MIPS dengan clock 16 MHz.
32 KB Flash memory dan pada arduino memiliki bootloader yang menggunakan 2 KB dari flash memori sebagai
bootloader.
Memiliki EEPROM (Electrically Erasable Programmable Read Only Memory) sebesar 1KB sebagai tempat penyimpanan data semi permanent karena EEPROM tetap dapat menyimpan data meskipun catu daya dimatikan.
MemilikiSRAM(Static Random Access Memory) sebesar 2KB. Memiliki pin I/O digital sebanyak 14 pin 6 diantaranya PWM
(Pulse Width Modulation) output. Master / SlaveSPI Serialinterface.
memisahkan memori untuk kode program dan memori untuk data sehingga dapat memaksimalkan kerja danparallelism.
Instruksi – instruksi dalam memori program dieksekusi dalam satu alur tunggal, dimana pada saat satu instruksi dikerjakan instruksi berikutnya sudah diambil dari memori program. Konsep inilah yang memungkinkan instruksi – instruksi dapat dieksekusi dalam setiap satu siklus clock. 32 x 8-bit register serba guna digunakan untuk mendukung operasi pada ALU ( Arithmatic Logic unit ) yang dapat dilakukan dalam satu siklus. 6 dari register serbaguna ini dapat digunakan sebagai
3 buah register pointer 16-bit pada mode pengalamatan tidak langsung untuk mengambil data pada ruang memori data.
Ketiga register pointer 16-bit ini disebut dengan register X (gabungan R26 dan R27 ), register Y ( gabungan R28 dan R29 ), dan register Z (gabungan R30 dan R31 ). Hampir semua instruksi AVR memiliki format 16-bit. Setiap alamat memori program terdiri dari instruksi 16-bit atau 32-bit.
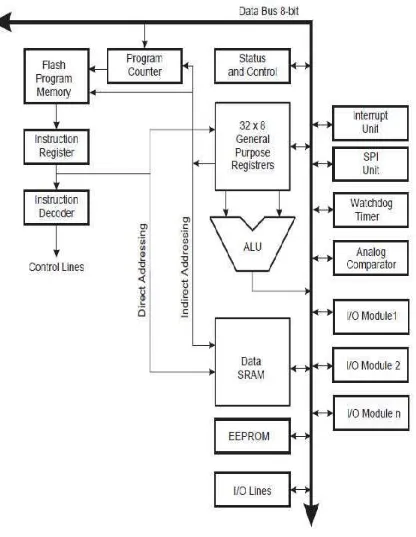
Berikut ini adalah tampilan architecture ATmega 328 :
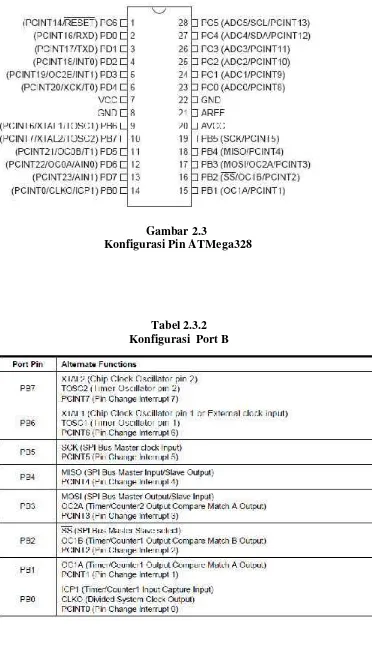
2.3.1 Konfigurasi PIN ATMega328
Gambar 2.3
Konfigurasi Pin ATMega328
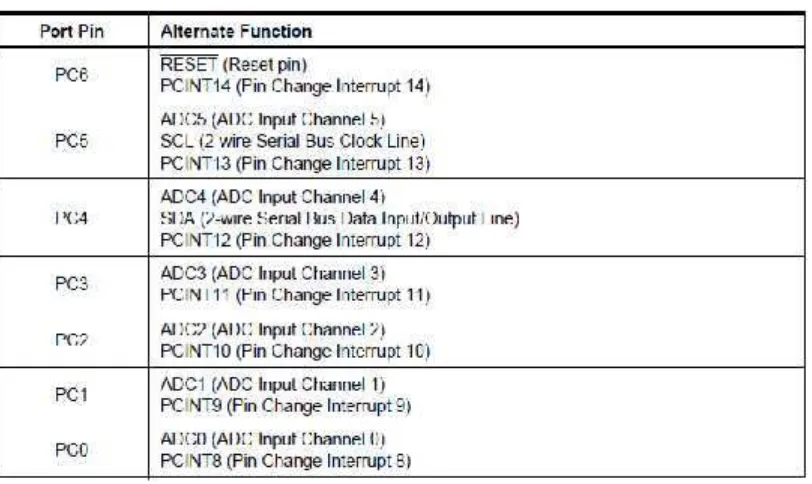
Tabel 2.3.3 Konfigurasi Port C
2.4 Aktuator
Aktuator adalah bagian yang berfungsi sebagai penggerak dari perintah yang diberikan oleh input. Aktuator biasanya merupakan peranti elektromekanik yang menghasilkan gaya gerakan. Aktuator terdiri dari 2 jenis, yaitu:
1. Aktuator elektrik
2. Aktuator pneumatik dan hidrolik.
Pada penelitian ini aktuator yang akan digunakan adalah aktuator elektrik yang berupa motor DC dan motor Stepper yang menggunakan driver motor IC L293 akan dijelaskan sebagai berikut :
2.4.1 Motor DC
Motor DC merupakan alat yang berfungsi untuk merubah energi listrik menjadi energi gerak. Prinsip kerjanya adalah bila energi listrik dilewatkan pada sebuah konduktor maka arus akan mengalir pada konduktor tersebut dan akan dihasilkan sebuah medan magnet yang selanjutnya akan menghasilkan energi gerak. Besarnya gaya gerak yang dihasilkan bergantung pada 3 hal yaitu:
1. Arus yang melewati konduktor. 2. Panjang konduktor.
3. Kuat medan magnet.
Dari ketiga factor tersebut dapat dirumuskan:
F = B X I X L ………. (2.1) Dimana :
F = Gaya gerak (newton) B = Kuat medan magnet (tesla)
I = Besar arus listrik pada konduktor (ampere) L = Panjang konduktor (meter)
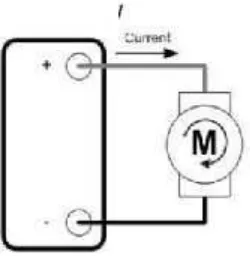
Dengan berdasarkan pada prinsip gaya Lorentz, memberikan tegangan pada DC motor akan membuat motor berputar secara kontinyu ke arah tertentu. Membalik arah putaran motor dapat dilakukan dengan mengubah polaritas arus yang mengalir pada motor. Gambar 2.4 memperlihatkan arah perputaran motor DC berdasarkan polaritas arus yang mengalir.
Gambar 2.4 Arah perputaran motor DC (Waroh, 2014)
Motor DC biasanya mempunyai kecepatan putar yang cukup tinggi dan sangat cocok digunakan untuk roda robot yang membutuhkan kecepatan gerak yang tinggi. Pada penelitian ini motor DC digunakan sebagai penggerak utama robot.
Bagian–bagian motor pada Gambar 2.5 adalah: 1. Armature core dan armature slot
Armature slot terbuat dari bahan magnet yang dilapisi baja, berbentuk slot yang dilas bersama denganarmature core.
2. Armature winding
Merupakan belitan pada armature slot yang terhubung dengan komulator dan pada umumnya terbuat dari tembaga.
3. Field poles
Intinya terbuat dari baja dan berfungsi untuk mengurangi pengaruh gesekan udara. 4. Yoke
Berbentuk lingkaran yang terbuat dari baja yang menyediakan keperluad kutub magnet bagi pole
5. Brushes dan Brush holders
Brush holders memiliki pegas yang berfungsi untuk menjaga brush agar tetap terhubung dengan komulator. Brush pada umumnya terdiri atas tembaga yang fleksibel. (Waroh, 2014)
2.4.2 Motor Stepper
Motor Stepper salah satu jenis motor yang banyak digunakan saat ini sebagai actuator, misalnya sebagai penggerak head baca/tulis pada disk drive yang akan menetapkan posisi head baca/tulis di atas permukaan piringan disket, penggerak head pada printer dan line feed control, dan yang lebih populer saat ini adalah aplikasi dalam bidang robotik. Dengan bantuan mikroprosesor atau mikrokontroler perputaran motor dapat dikontrol dengan tepat dan terprogram.
2.4.3 Motor Driver IC L293
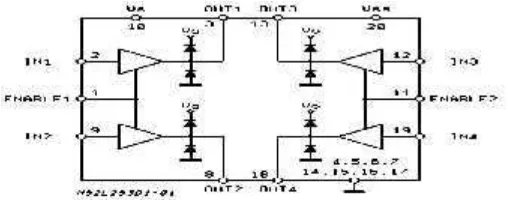
Gambar 2.6 Blok diagram motor driver tipe IC L293 (www.arduino.cc)
L293 mempunyai 2output power stage yaitu A dan B pada gambar 2.6.Output power stage adalah sebuah konfigurasi bridge, dimana output-nya dapat men-drive sebuah induktif load secara mode umum atau diffensial tergantung pada input state-nya. Arus yang mengalir keluar dari rangkaian bridge keluar melalui pin output sense, dimana sense output dihubungkan dengan resistor external RsA dan RsB. Dengan adanya resistor RsA dan RsB dapat diketahui intensitas arusnya. Setiap bridge di drive oleh AND gate yang masing – masing input-nya adalah In1, In2, EnA dan In3, In4, EnB. Input-an In akan men-set bridge bila input-an En high, sebaliknya bila input-an En low makabridgetidak aktif.
2.5 Sensor
Sensor pada robot merupakan perangkat atau komponen pengumpul informasi lingkungan tempat robot berada. Berdasarkan masukan sensor-sensor yang terpasang, unit mikrokontroler dapat menganalisanya dan menentukan keputusan yang tepat sesuai dengan algoritma yang telah dirancang (Suryatini, et al. 2013).
Sensor yang digunakan dapat berupa sensor yang dibuat dari sistem yang paling sederhana seperti sensor ON/OFF menggunakan limit switch, sistem analog, sistem bus parallel, sistem bus serial, hingga sistem mata kamera yang masing-masing cara pengukuran dan carainterfacingke kontrolernya berbeda-beda.
2.6 Kamera CCTV
Kamera CCTV adalah Closed Circuit Television yang artinya sebuah kamera pengintai yang dapat merekam gambar dan suara, kedalam sebuah monitor yang
yang di dalamnya terdapat sebuah Hardisk yang kemudian dikelola sehingga menjadi
file rekaman untuk memutar ulang apa yang telah terekam oleh CCTV tersebut.Pada
umumnya CCTV digunakan sebagai pelengkap keamanan dan banyak dipakai di
dalam industri-industri seperti militer, bandara, toko, kantor, pabrik dan bahkan
sekarang perumahan pun telah banyak yang menggunakan teknologi ini. amera
CCTV ini berfungsi sebagai alat pengambil gambar, ada beberapa tipekamera yang membedakan dari segi kualitas, penggunaan dan fungsinya 2 hal yang
paling utama adalah, cameraCCTV analog danCamera CCTV Networkdimana
kamera analog menggunakan satu solid kable untuk setiap kamera yang berarti,
setiap kamera akan harus terhubung ke DVR atau system secara langsung
sedangkan Camera Networkatau yang biasa di sebut IP Kamera, bisa menggunakan
jejaring yang berarti akan menghemat dari segi installasi karena network bersifat
pararel dan bercabang tidak memerlukan satu kabel khusus untuk tiap kamera dalam
pengaksesannya.Kamera CCTV dapat dilihat seperti pada Gambar 2.7.
Gambar 2.7 Kamera CCTV
2.7 DVR
Untuk menyimpan dan memback up data tersedia port USB untuk CD / DVD Rewriters. DVR yang digunakan pada robot CCTV dapat dilihat seperti pada gambar 2.8.
Gambar 2.8 DVR
2.8 Modem
Modem berasal dari singkatan Modulator Demodulator. Modulator merupakan bagian yang mengubah sinyal informasi ke dalam sinyal pembawa (carrier) dan siap untuk dikirimkan, sedangkan demodulator adalah bagian yang memisahkan sinyal informasi (yang berisi data atau pesan) dari sinyal pembawa yang diterima sehingga informasi tersebut dapat diterima dengan baik. Seiring dengan perkembangan jaman, modem berkembang menjadi modem wifi. Sama seperti Wireless Access Point, modem wifi menggabungkan 3 fungsi sekaligus yaitu modem, router dan access point. Sehingga dapat mengakses sinyal untuk konektivitas internet, meneruskan sinyal untuk dipancarkan, dan membentuk access point yang dapat diakses oleh perangkat lain melalui wifi. Gambar 2.9 merupakan contoh dari modem wifi yang digunakan pada robot CCTV.
2.9 Android
Android merupakan sebuah sistem operasi mobile yang namanya sedang melambung tinggi, dan mampu menyaingi sistem operasi mobile yang ada sebelumnya seperti, Windows mobile, iOS, Symbian dan masih banyak lagi. Android memiliki sistem operasi berbasis Linux untuk perangkat portable seperti smartphone dan komputer tablet (Irawan, 2012). Sistem operasi android ini memiliki kelebihan yaitu open source, sehingga para programmer dapat mengembangkan atau menciptakan aplikasi sendiri. Android menggunakan bahasa java dalam pengembangan programnya. Android juga telah menyediakan Android market bagi para pengembang untuk menempatkan dan menjual aplikasi yang sudah di buat (Hermawan, 2011).
2.10 Penelitian Terdahulu
Pada Tahun 2014 Ferindra Nugrahendi melakukan penelitian robot ballbot menggunakan logika fuzzy. Robot tersebut bergerak dengan menggunakan sensor accelerometer yang dimiliki perangkat android. Sensor accelerometer digunakan untuk mengatur arah dengan cara mem-variasikan kemiringannya. Robot ballbot merupakan robot keseimbangan yang mampu mempertahankan keseimbangannya dengan menggunakan bola sebagai alat geraknya.
Selain itu, Wellina Leonardy (2013) melakukan penelitian robot pemantau ruangan dengan system kendali menggunakan smartphone android. Koneksi yang digunakan antara robot dan smartphone adalah dengan menggunakan koneksi Bluetooth. Tujuan dari penelitian ini adalah untuk melakukan pemantauan seperti kamera cctv dan dapat bergerak kemanapun sesuai dengan keinginan penggunanya.
yang dapat memonitor suatu ruangan dan objek di sekitarnya. Robot ini dikontrol melalui remote dengan menggunakan koneksi infra merah.
Donato Di Paola (2010) melakukan penelitian robot mobile otomatis untuk sistem pengawasan lingkungan indoor. Tujuan utama dari Robot otomatis ini adalah untuk mendapatkan informasi tentang perubahan lingkungan di daerah yang telah ditentukan. Sehingga robot otomatis ini memiliki dua tugas utama yaitu memonitor posisi objek yang telah ditentukan atau kehadiran dari objek baru, sedangkan tugas kedua adalah mendeteksi kehadiran penyusup bereaksi dengan tindakan yang telah ditentukan. Robot ini menggunakan RFID untuk melakukan pemetaan lokasi dan menggunakan sensor laser untuk mendeteksi manusia berdasarkan bentuk kaki dan karakteristik gerakan.Robot ini merupakan jenis robot embedded pc, artinya robot ini tergabung dengan pc,dan memiliki tambahan dua laptop, laptop yang pertama berfungsi untuk memproses penglihatan robot dan laptop kedua berfungsi sebagai kontrol aplikasi danuser interface.
Pada tahun 2011, Hou-Tsan Lee melakukan penelitian terhadap robot keamanan untuk menjelajah di dalam ruangan. Robot ini dapat bergerak sendiri dan dapat dikendalikan melalui smartphone. Dengan bantuan RFID (Radio Frequency Identification), sistem ini dapat digunakan untuk melacak objek. Robot keamanan ini bergerak pada jalur yang sudah ditentukan, pada setiap sudut jalur telah dipasang RFID tag, pendeteksi RFID akan mendeteksi tag tersebut kemudian pendeteksi RFID akan mengirim sinyal balik ke server, agar user dapat mengetahui lokasi /posisi dari robot keamanan tersebut. Robot ini juga dilengkapi dengan fitur pendeteksi wajah, jika robot mendeteksi wajah,dan wajah tersebut ada atau tersimpan pada server file gambar, maka robot mengirim sinyal kepada pengguna untuk melakukan pemantauan pada orang tersebut atau tidak .