TUGAS AKHIR
Diajukan untuk Memenuhi Salah Satu Syarat Memperoleh Gelar Sarjana Teknik pada
Program Studi Teknik Elektro
Oleh:
Nama : Clemensius Adith Nugroho NIM : 025114017
PROGRAM STUDI TEKNIK ELEKTRO
JURUSAN TEKNIK ELEKTRO
FAKULTAS SAINS DAN TEKNOLOGI
UNIVERSITAS SANATA DHARMA
YOGYAKARTA
2007
FINAL PROJECT
Presented as Partial Fulfillment of the Requirements To Obtain the Sarjana Teknik Degree
In Electrical Engineering Study Program
By :
Name : Clemensius Adith Nugroho Student ID Number : 025114017
ELECTRICAL ENGINEERING STUDY PROGRAM
DEPARTMENT OF ELECTRICAL ENGINEERING
FACULTY OF SCIENCE AND TECHNOLOGI FACULTY
SANATA DHARMA UNIVERSITY
YOGYAKARTA
2007
PENGENDALI DAN PENAMPIL KETINGGIAN AIR
BERBASIS PC
(WATER LEVEL CONTROLLER AND DISPLAY BASED ON PC)
Oleh :
Clemensius Adith Nugroho NIM : 025114017
Telah disetujui oleh :
Dosen Pembimbing I,
B. Wuri Harini, ST, M.T Tanggal : ___________________
Dosen Pembimbing II,
Wiwien Widyastuti, S.T., M.T. Tanggal : ___________________
Dipersiapkan dan disusun oleh :
Clemensius Adith Nugroho
NIM : 025114017
Telah dipertahankan di depan Panitia Penguji
Pada tanggal : 24 Oktober 2007
dan dinyatakan memenuhi syarat
Susunan Panitia Penguji
Nama Lengkap Tanda Tangan
Ketua : Wiwien Widyastuti, S.T., M.T. ...
Sekretaris : B. Wuri Harini, S.T., M.T. ...
Anggota : A. Bayu Primawan, S.T., M.Eng. ...
Anggota : Pius Yozy Merucahyo, S.T., M.T. ...
Yogyakarta, 24 Oktober 2007
Fakultas Sains dan Teknologi Universitas Sanata Dharma
Dekan
Ir. Greg. Heliarko, S.J., S.S., B.S.T., M.A., M. Sc.
tidak memuat karya atau bagian karya orang lain,
kecuali yang telah disebutkan dalam kutipan dan daftar pustaka,
sebagaimana layaknya karya ilmiah.”
Yogyakarta, 24 Oktober 2007
Clemensius Adith Nugroho
You’ll never walk
alone ...
Dengan segala puj i dan syukur ke hadirat Allah Bapa, Allah Put ra, dan Allah Roh Kudus, penulis persembahkan karya ini kepada: Ayah dan Ibuku t ercint a Kakak–kakakku t ercint a Iwan & Ant o Segenap keluarga besarku t ercint a Semua t eman dan sahabat ku Kekasihku Leea at as kasih sayang dan dukungannya
T eman-t emanku elekt ro 2002 Almamet erku Universit as Sanat a Dharma T erimakasih at as segala dukungan, kasih dan cint a yang selalu diberikan pada penulis.
INTISARI
Tugas akhir ini mendeskripsikan tentang Pengendali dan Penampil Ketinggian Air Berbasis PC yang menggunakan pompa air untuk memperoleh ketinggian air yang stabil.
Pengendali dan penampil ketinggian air ini diolah dengan menggunakan program Visual Basic 6.0. Masukan dari pengendali PC ini adalah hasil biner dari keluaran ADC, kemudian diimplementasikan dengan menggunakan program Visual Basic. Dari hasil implementasi tersebut kemudian digunakan untuk mengendalikan pompa. Pada implementasi, terdapat 3 nilai level set point yaitu ketinggian air 4cm, ketinggian air 7cm, dan ketinggian air 10cm. Pemilihan set point dilakukan dengan memilih tombol set point pada program.
Pada saat sistem dilakukan pengujian, dapat diketahui bahwa perangkat elektronis yang dibuat sudah dapat digunakan sebagai piranti pengendali untuk mengatur batasan ketinggian air yang diinginkan.
Kata kunci : ketinggian air, pengendali, Visual Basic.
ABSTRACT
This final project describes about Water Level Controller and Display Based on PC using a water pump to get the water level constant.
Water Level Controller and Display Based on PC is applied using Visual Basic 6.0 program. Input from PC controller is binarry result from ADC, then implementation by using Visual Basic program. From the implementation result then applied to control pump. At implementation, there are 3 value level set point that is water level 4cm, water level 7cm, and water level 10cm. Selection of set point done by choosing set point button at program.
When the system was tested, can be known that periperal electronis which made have earned to be used as controller apparatus to arrange wanted water level constrain
Keywords: water level, controller, Visual Basic.
kasih karunia-Nya sehingga penulis dapat menyelesaikan tugas akhir yang
berjudul “Pengendali dan Penampil Ketinggian Air Berbasis PC.”
Tugas akhir ini disusun sebagai salah satu syarat untuk memperoleh gelar
Sarjana Teknik Elektro di Fakultas Sains dan Teknologi Universitas Sanata
Dharma sekaligus sebagai upaya untuk memperdalam dan memperkaya wawasan
berpikir serta menambah wacana di bidang elektronika khususnya dan sains
teknologi pada umumnya.
Pembuatan tugas akhir ini tidak terlepas dari bantuan dan bimbingan
berbagai pihak, untuk itu penulis ingin mengucapkan terima kasih kepada :
1. Tuhan Yesus atas penyertaan dan bimbingan-Nya.
2. Bapak Ir. Gregorius Heliarko, S.J., S.S., BST., M.A., M.Sc. selaku Dekan
Fakultas Sains dan Teknologi Universitas Sanata Dharma.
3. Bapak A. Bayu Primawan, S.T., M.Eng selaku Kepala Jurusan Teknik
Elektro.
4. Ibu B. Wuri Harini, S.T., M.T. selaku dosen pembimbing I atas ide-ide
yang berguna dan juga telah memberikan bimbingan, masukan, waktu, dan
perhatiannya selama penyusunan tugas akhir ini.
5. Ibu Wiwien Widyastuti, S.T., M.T. selaku dosen pembimbing II yang telah
bersedia meluangkan waktu serta memberikan bimbingan dan saran yang
sangat berguna untuk tugas akhir ini.
moril maupun materiil. Kuingin bisa berikan sesuatu yang berharga.
9. Mas Iwan dan Mas Anto atas kasih sayang, doa, perhatian, dan dukungan
yang tiada henti.
10. Seseorang yang sangat berarti untukku dalam suka dan duka Leea Lovisa,
udah ngga kehitung the nite and days you help me. Terima kasih atas
kebersamaan, dukungan, cinta, perhatian, dan kesabaran yang tiada henti.
11. Saudara-saudaraku di The Marto’s : Tutus, Coco, Rino thanks bro.
12. Segenap keluarga Bapak Wakidi, terima kasih atas segala kebaikannya.
13. Sahabat dan teman-temanku di Marcopolo Sang Pemberani dan Tangguh :
Plenthonx, Gepeng, Bhule, Nango, Deri, Andex, Lambe, Iksan, Yudi,
special thanks to Kobo, terima kasih atas dukungan, perhatian, perjuangan,
kebersamaan dan kekompakannya selama ini. Tak lupa saya ucapkan
terima kasih untuk Mas Nok, Hymen, Marcel, Inul yang telah merantau
entah kemana. Tetap bertahan walapun dunia keras, thanks for all guys...
jangan pada ganti nomor ya.
14. Sahabat-sahabatku di elektro 2002 : Sinung, PK, Koten, Wawan, Roby,
Dhanny, Yoga, Andis, Hari, Lele, Dhika, Oscar, Ido, Denny, Ahok, Iyok,
Erick, Heri S, Broto, Bala dan teman-teman seperjuangan lain yang tidak
dapat saya sebutkan satu persatu di sini. Saya ucapkan banyak terima kasih
atas dukungannya. Semoga kita semua dapat menyelesaikan apa yang
16. Teman-temanku di dunia maya, keep contact.
17. Komputerku sayang komputerku malang, tanpamu apalah jadinya daku.
18. Balon, semoga kau tenang di alam sana.
19. Semua pihak yang telah membantu dan tidak dapat disebutkan satu persatu
sehingga skripsi ini dapat diselesaikan.
Penulis dengan penuh kesadaran memahami dalam penelitian ini masih
banyak terdapat kekurangannya. Oleh karenanya sumbang saran yang bersifat
membangun dari pembaca sangat diharapkan. Akhirnya penulis berharap semoga
tugas akhir ini dapat bermanfaat bagi pembaca khususnya dan dunia elektronika
umumnya.
Yogyakarta, 24 Oktober 2007
Penulis
Clemensius Adith Nugroho
HALAMAN JUDUL ... i
HALAMAN PERSETUJUAN ... iii
HALAMAN PENGESAHAN... iv
HALAMAN PERNYATAAN KEASLIAN KARYA ... v
HALAMAN MOTTO DAN PERSEMBAHAN... vi
INTISARI ... vii
ABSTRACT ... viii
KATA PENGANTAR... ix
DAFTAR ISI... xii
DAFTAR GAMBAR ... xvi
DAFTAR TABEL ... xix
BAB I. PENDAHULUAN
1.1 Judul ... 11.2 Latar Belakang ... 1
1.3 Tujuan dan Manfaat ... 2
1.4 Perumusan Masalah... 3
1.5 Batasan Masalah... 3
1.6 Metodologi Penelitian ... 4
1.7 Sistematika Penulisan... 5
2.1.2 Konfigurasi sistem Kendali ... 9
2.1.3 Variabel Sistem Kendali... 10
2.2 Transduser Hambatan... 11
2.2.1 Resolusi ... 12
2.3 ADC (Analog to Digital Converter)... 12
2.3.1 Parameter ADC ... 15
2.4 Visual Basic 6.0... 16
2.4.1 Menu Bar... 17
2.4.2 Toolbars... 17
2.4.3 Jendela Project Explorer... 18
2.4.4 Jendela Properties... 18
2.4.5 Jendela Form Layout... 19
2.4.6 Jendela Form Designer... 19
2.4.7 Toolbox... 20
2.4.8 Jendela Code Editor... 20
2.5 Port Paralel DB25 ... 21
2.6 Penggerak Pompa AC (Driver) ... 23
2.7 Solid-State Relay... 25
2.8 Penguat Tak Membalik (Non Inverting Amplifier) ... 26
2.9 Tanggapan Sistem... 28
3.2.1 Pelampung ... 31
3.2.2 Sensor ... 32
3.2.3 Penguat Tegangan ... 33
3.2.4 Antarmuka Rangkaian Sensor dan Rangkaian Penguat Tegangan dengan ADC ... 35
3.2.5 Analog to Digital Converter (ADC 0804)... 37
3.2.6 Antarmuka DB25 dengan ADC 0804 ... 38
3.2.7 Pengendali Menggunakan PC ... 39
3.2.8 Penggerak Pompa (Driver)... 39
3.2.9 Aktuator (Pompa) ... 40
3.3 Perancangan Software... 40
3.3.1 Diagram Alir Keseluruhan Sistem Kerja... 40
3.3.2 Program Penampil Ketinggian Air ... 43
BAB IV. HASIL PENGAMATAN DAN PEMBAHASAN
4.1 Prinsip Kerja dan Cara Pengoperasian Alat ... 464.2 Pengamatan Tanggapan Sistem... 48
4.2.1 Data Pengamatan Set Point pada Keadaan Kran Tertutup ... 48
4.2.2 Data Pengamatan Set Point pada Keadaan Kran Terbuka... 56
4.4 Pengamatan Kontroler On-Off... 67
4.5 Pengamatan ADC... 68
4.6 Pengamatan Kerja Program Visual Basic 6.0 ... 70
BAB V. PENUTUP
5.1 Kesimpulan ... 79
5.2 Saran ... 79
DAFTAR PUSTAKA
LAMPIRAN
Gambar 2.2.a Simbol Potensiometer ... 11
Gambar 2.2.b Perbandingan hambatan RA dan RB pada potensiometer ... 11
Gambar 2.3 Konfigurasi pin-pin IC ADC 0804 ... 13
Gambar 2.4 Daerah Pengembangan Visual Basic 6.0 ... 17
Gambar 2.5 Menu Bar... 17
Gambar 2.6 Toolbars... 18
Gambar 2.7 Jendela Project Explorer... 18
Gambar 2.8 Jendela Properties... 19
Gambar 2.9 Form Layout... 19
Gambar 2.10 Jendela Form Designer... 20
Gambar 2.11 Toolbox... 20
Gambar 2.12 Jendela Code Editor... 21
Gambar 2.13 Port paralel DB25... 22
Gambar 2.14 Bentuk fisik triac... 23
Gambar 2.15 Kurva karakteristik triac... 24
Gambar 2.16 MOC30XX (SSR)... 26
Gambar 2.17 Non Inverting Amplifier... 27
Gambar 3.1 Blok diagram pengendali dan penampil ketinggian air berbasis PC ... 30
Gambar 3.4 Rangkaian sensor ... 32
Gambar 3.5 Grafik tegangan keluaran sensor terhadap ketinggian air.... 33
Gambar 3.6 Penguat tegangan menggunakan potensiometer ... 34
Gambar 3.7 Antarmuka sensor dan penguat tegangan dengan ADC 0804 35 Gambar 3.8 Konfigurasi pin-pin IC ADC 0804 ... 37
Gambar 3.9 Antarmuka DB25 dengan ADC 0804... 38
Gambar 3.10 Rangkaian penggerak pompa (driver) ... 40
Gambar 3.11 Diagram alir keseluruhan sistem kerja ... 41
Gambar 3.12 Tampilan awal program ... 43
Gambar 3.13 Tampilan menu help... 43
Gambar 3.14 Tampilan program pengendali ketinggian air... 45
Gambar 4.1 Perangkat keras pengendali dan penampil ketinggian air berbasis PC ... 47
Gambar 4.2 Grafik pengamatan untuk set point pertama (4cm) ... 49
Gambar 4.3 Tanggapan sistem untuk set point pertama (4cm) ... 49
Gambar 4.4 Grafik pengamatan untuk set point kedua (7cm)... 52
Gambar 4.5 Tanggapan sistem untuk set point kedua (7cm) ... 52
Gambar 4.6 Grafik pengamatan untuk set point ketiga (10cm) ... 54
Gambar 4.7 Tanggapan sistem untuk set point ketiga (10cm) ... 55
Gambar 4.8 Grafik pengamatan untuk set point pertama (4cm) ... 57
Gambar 4.12 Grafik pengamatan untuk set point ketiga (10cm) ... 63
Gambar 4.13 Tanggapan sistem untuk set point ketiga (10cm) ... 64
Gambar 4.14 Grafik pengamatan sensor ... 67
Gambar 4.15 Tampilan menu login... 70
Gambar 4.16 Tampilan menu help... 70
Gambar 4.17 Tampilan form utama program ... 71
Gambar 4.18 Tampilan form utama program pada keadaan awal (3cm) .. 72
Gambar 4.19 Tampilan form utama program pada ketinggian 4cm... 72
Gambar 4.20 Tampilan form utama program pada ketinggian 5cm... 73
Gambar 4.21 Tampilan form utama program pada ketinggian 6cm... 73
Gambar 4.22 Tampilan form utama program pada ketinggian 7cm... 73
Gambar 4.23 Tampilan form utama program pada ketinggian 8cm... 74
Gambar 4.24 Tampilan form utama program pada ketinggian 9cm... 74
Gambar 4.25 Tampilan form utama program pada ketinggian 10cm... 74
Gambar 4.26 Grafik pengamatan tampilan pada Visual Basic saat kran tertutup ... 75
Gambar 4.27 Grafik pengamatan tampilan pada Visual Basic saat kran terbuka ... 75
Gambar 4.28 Grafik perbandingan pengamatan hasil pengukuran dengan pengamatan tampilan pada Visual Basic saat kran tertutup.. 76
DAFTAR TABEL
Tabel 2.1 Konfigurasi pin dan nama sinyal konektor paralel standar DB25 22
Tabel 3.1 Data pengukuran awal 1... 32
Tabel 3.2 Data pengukuran awal 2... 36
Tabel 4.1 Data pengamatan untuk set point 4cm ... 48
Tabel 4.2 Data pengamatan untuk set point 7cm ... 51
Tabel 4.3 Data pengamatan untuk set point 10cm ... 54
Tabel 4.4 Data pengamatan untuk set point 4cm ... 57
Tabel 4.5 Data pengamatan untuk set point 7cm ... 60
Tabel 4.6 Data pengamatan untuk set point 10cm ... 63
Tabel 4.7 Data delay time, rise time, settling time dan steady-state error.... 66
Tabel 4.8 Data tegangan keluaran sensor terhadap ketinggian air ... 67
Tabel 4.9 Data tegangan keluaran port DB-25 pada pin 2... 68
Tabel 4.10 Pengambilan data ADC untuk setiap perubahan kenaikan nilai ... 69
Tabel 4.11 Data perbandingan hasil pengukuran dengan hasil pengamatan saat kran tertutup ... 76
Tabel 4.12 Data perbandingan hasil pengukuran dengan hasil pengamatan saat kran terbuka ... 78
1.1 Judul
Pengendali dan Penampil Ketinggian Air Berbasis PC.
1.2 Latar Belakang Masalah
Pada tempat-tempat penampungan air seringkali diperlukan suatu
mekanisme untuk mengetahui ketinggian permukaan air. Seringkali mekanisme
tersebut masih berupa cara-cara manual, semisal dengan melihat dan melakukan
pengukuran langsung pada tempat penampungan air tersebut. Mungkin cara
tersebut merupakan cara yang paling sederhana dan mudah, tetapi akan sedikit
sulit jika misalnya letak penampungan air tersebut sulit dijangkau manusia,
sehingga kadang-kadang diperlukan suatu mekanisme pengukur ketinggian
permukaan air secara otomatis, salah satunya dengan membuat semacam sensor
pengukur ketinggian air. Sensor ini kemudian dipasangkan pada penampung air
tersebut.
Dalam dunia industri modern hampir semua sistem dikendalikan secara
elektronis, baik oleh komputer maupun alat-alat elektronis. Pengendali elektronis
ini merupakan salah satu cara dalam meningkatkan efisiensi produksi suatu
industri. Dalam penelitian ini peneliti mempelajari dan mempraktekkan aplikasi
suatu sistem pengendali otomatis.
Salah satu proses pengendali elektronis adalah pengendali ketinggian
permukaan air menggunakan PC. Pengendalian ketinggian air dalam suatu bak air
ini meliputi beberapa komponen penting, yaitu: pompa air, bak air, sensor
ketinggian air, dan kran pembuangan. Pengendalian ketinggian air dengan
rangkaian digital ini merupakan pengendali dengan kalang tertutup. Untuk itulah
pada penelitian ini, penulis menyajikan sebuah alat yang berfungsi untuk
mengendalikan dan menampilkan ketinggian air dengan menggunakan program
Visual Basic 6.0. Kemampuan alat ini adalah memudahkan kita untuk
mengendalikan ketinggian air sehingga tidak perlu pengendalian manual,
melainkan sudah diatur dalam suatu program yang hasilnya juga akan ditampilkan
dalam program tersebut. Penulis memberi judul “Pengendali dan Penampil
Ketinggian Air Berbasis PC”.
1.3 Tujuan dan Manfaat
Adapun tujuan pembuatan alat ini yaitu merancang dan membuat suatu
peralatan yang berfungsi sebagai pengendali ketinggian air yang akan ditampilkan
melalui PC.
Adapun manfaat dari pembuatan alat ini adalah:
1. Peneliti dapat menguasai program Visual Basic secara baik dan dapat
diaplikasikan pada pembuatan alat pengendali dan penampil
ketinggian air.
2. Sebagai alat bantu pengaturan volume air pada tangki penampungan
air rumah tangga.
1.4 Perumusan Masalah
Hingga saat ini alat pengendali dan penampil ketinggian air belum banyak
dikenal dan jarang digunakan orang. Dalam pembuatan sistem pengendali dan
penampil ketinggian air berbasis PC ini yang menjadi pemikiran utama adalah
membuat sistem pengendali dan penampil ketinggian air dalam bak dengan
menggunakan potensiometer sebagai sensor jarak dan keluaran dari
potensiometer ini dapat diterima dan diolah oleh komputer dengan memanfaatkan
perangkat lunak Visual Basic 6.0. Dengan program Visual Basic 6.0 ini akan
dihasilkan tampilan berupa angka dan gambar.
Dengan melihat beberapa tujuan dan latar belakang yang ada, maka
permasalahan yang dapat dirumuskan pada pembuatan alat ini adalah sebagai
berikut:
1. Apakah pengendali ketinggian air yang dibuat perangkat lunak Visual
Basic 6.0 ini akan memiliki tingkat keakuratan yang tinggi?
2. Apakah sistem yang dirancang dapat bekerja dengan baik?
3. Apakah pemilihan komponen yang tepat dalam proses perancangan
akan mempengaruhi keakuratan pengendalian dalam praktek?
1.5 Batasan Masalah
Alat yang digunakan sebagai pengendali dan penampil ketinggian air ini
1. Bahasa pemrograman yang digunakan adalah Visual Basic 6.0.
2. Menggunakan 3 set point (4cm, 7cm, 10cm) sebagai batas sensor ketinggian air.
3. Bak air yang digunakan adalah dua buah bak aquarium dengan
panjang 30cm, lebar 15cm, dan tinggi 15cm. Bak bawah sebagai
sumber dan bak atas sebagai objek ketinggian air yang dikendalikan.
4. Menggunakan Windows XP.
5. Menggunakan parallel port.
1.6 Metodologi Penelitian
Metodologi yang digunakan untuk menyelesaikan permasalahan dalam
pembuatan alat yaitu:
1. Mengumpulkan referensi dan literatur dari perpustakaan dan internet
yang berhubungan dengan alat yang akan dibuat.
2. Pembuatan plant yang terkonsep. 3. Pengambilan data dari plant.
4. Perancangan pengendali sesuai dengan yang diinginkan.
5. Implementasi dari pengendali dan plant. 6. Pengujian.
1.7 Sistematika Penulisan
Sistematika penulisan laporan tugas akhir ini adalah sebagai berikut :
BAB I Pendahuluan
Bab ini berisi tentang latar belakang masalah, tujuan dan
manfaat dari penelitian, perumusan masalah, batasan
masalah, metodologi penelitian, serta sistematika penulisan.
BAB II Dasar Teori
Bab ini berisi tentang dasar teori yang digunakan untuk
membuat Pengendali suhu air yang disertai dengan
penjelasan.
BAB III Rancangan Penelitian
Bab ini berisi tentang rancangan peralatan yang dibuat,
pemilihan komponen, serta penjelasan singkat tentang cara
kerja peralatan.
BAB IV Hasil dan Pembahasan
Bab ini berisi tentang pembahasan dan analisis mengenai
hasil penelitian yang telah dilaksanakan.
BAB V Kesimpulan dan Saran
Bab ini berisi tentang kesimpulan dan spesifikasi peralatan
yang dibuat serta saran-saran untuk perbaikan alat dan
Pengendali dan penampil ketinggian air adalah alat yang digunakan untuk
mengendalikan dan menampilkan perubahan ketinggian air. Pembuatan sistem
pengendali dan penampil ketinggian air berbasis PC ini menggunakan penampil
berupa tampilan pada monitor dengan program Visual Basic 6.0 sebagai
pengendali dan penampil keseluruhan sistem kerja. Port paralel digunakan untuk mengatur pengiriman data antara plant dengan PC.
2.1 Sistem Kendali
2.1.1 Tinjauan Umum Sistem Pengendalian
Sistem kendali adalah proses pengendalian terhadap suatu besaran
yang memiliki jangkauan nilai tertentu yang dapat dikendalikan. Sistem
pengendalian ditinjau dari segi peralatan, sistem kendali terdiri dari
berbagai susunan komponen fisis yang digunakan untuk mengarahkan
aliran energi ke suatu mesin atau proses agar dapat menghasilkan sesuatu
[1].
Sistem pengendalian terdiri dari tiga proses, yaitu: pengukuran,
pembandingan, dan perbaikan. Secara umum sistem kendali dapat di
kelompokkan sebagai berikut:
1. Pengendali manual dan otomatis.
Pengendalian secara manual adalah pengendalian yang
dilakukan oleh manusia yang bertindak sebagai operator, sedangkan
pengendalian secara otomatis adalah pengendalian yang dilakukan
oleh mesin-mesin atau peralatan yang bekerja secara otomatis dan
pengoperasiannya di bawah pengawasan manusia.
Disebut sistem kendali otomatis jika suatu sistem merupakan
sistem pengendali kalang tertutup dan pengendalian secara variabel
dilakukan oleh peralatan otomatis berupa
peralatan-peralatan elektronis, pneumatis, mekanis maupun kombinasinya.
Berdasarkan hal tersebut karakteristik penting dari sistem kontrol
otomatis adalah sebagai berikut :
a. Sistem kendali otomatis merupakan sistem dinamis yang
dapat berbentuk linier atau nonlinear. Secara metematis kondisi ini dinyatakan oleh persamaan-persamaan yang
berubah terhadap waktu. Misalnya persamaan differensial linier atau nonlinier.
b. Bersifat menerima masukan, memprosesnya, mengolahnya,
dan kemudian mengembangkannya.
c. Komponen atau unit yang membentuk sistem pengendalian
d. Bersifat mengembalikan sinyal ke bagian masukan atau
umpan balik dan sinyal umpan balik ini digunakan untuk
mengontrol kesalahan sistem.
2. Pengendali kalang tertutup dan kalang terbuka.
Sistem pengendali kalang tertutup adalah besaran keluaran
sistem pengendalian yang memberikan efek terhadap masukan sebagai
besaran yang dikendalikan untuk dibandingkan terhadap besaran
masukan yang dicatat melalui alat pencatat. Perbedaan nilai yang
terjadi antara besaran yang dikendalikan dan ditampilkan dengan alat
pencatat digunakan sebagai pengontrol kesalahan yang nantinya akan
menjadi besaran pengendalian. Jadi dengan kata lain, sistem kendali
kalang tertutup adalah sistem kendali berumpan balik.
Istilah kalang tertutup berarti menggunakan aksi umpan balik
untuk memperkecil kesalahan sistem. Jika sistem kendali digunakan
untuk menggantikan operator manusia maka sistem kendali tersebut
menjadi otomatis.
Sistem pengendali kalang terbuka adalah besaran keluaran
sistem pengendalian tidak memberikan efek terhadap masukan
sebagai besaran yang dikendalikan. Jadi sistem pengendalian kalang
2.1.2 Konfigurasi SistemKendali
Setiap proses kendali terdiri dari unit yang membentuknya yang
disebut elemen sistem dan selanjutnya elemen ini terdiri dari
komponen-komponen.
Suatu proses kendali secara fungsional dapat dinyatakan dengan
diagram kotak yang bentuknya tergantung pada jumlah elemen. Diagram
kotak yang umum diberikan pada gambar 2.1.
Masukan
Gv Pengendali
G1
Proses G2
Keluaran
Gambar 2.1 Elemen-elemen kendali edaran tertutup [1].
Secara umum, elemen dari sebuah kontrol rangkaian tetutup terdiri dari :
1. Masukan Gv.
Elemen ini berfungsi untuk mengubah besaran yang dikontrol menjadi
sinyal masukan bagi sistem kontrol.
2. Pengendali G1.
Berfungsi untuk memproses sinyal kesalahan yang terjadi dan setelah
sinyal kesalahan tersebut dimasukkan melalui elemen pengendalian,
akan dihasilkan sinyal yang berfungsi sebagai pengendali proses.
Jalur Umpan Balik
H
-3. Proses G2.
Elemen ini dapat berupa proses mekanis, elektris, hidraulis, pneumatis,
maupun kombinasinya. Dalam perancangan ketinggian permukaan air
ini hanya menggunakan proses mekanis dan elektris.
4. Jalur Umpan Balik H.
Bagian sistem yang mengukur keluaran yang dikontrol dan kemudian
mengubahnya menjadi sinyal umpan balik.
2.1.3 Variabel Sistem Kendali
Berdasarkan jumlah elemen yang menyusun suatu sistem kendali,
terdapat beberapa variabel pngendalianyaitu :
1. Set point adalah nilai acuan yang ditentukan secara variabel dan
dikendalikan selama pengendalian.
2. Masukan acuan adalah sinyal aktual yang masuk ke sistem
pengendalian.
3. Keluaran yang dikendalikan adalah nilai yang akan dipertahankan bagi
variabel yang dikendalikan.
4. Variabel yang dimanipulasi adalah sinyal dari elemen pengendalian dan
berfungsi sebagai sinyal pengendalian tanpa adanya gangguan.
5. Sinyal umpan balik adalah sinyal yang merupakan fungsi dari keluaran
yang dicatat oleh alat pencatat.
6. Sinyal kesalahan adalah selisih antara sinyal acuan dari set point
dengan sinyal sensor ketinggian permukaan air.
2.2 Transduser Posisi Hambatan
Salah satu komponen elektronika yang dapat digunakan sebagai transduser
posisi hambatan adalah potensiometer. Potensiometer adalah suatu hambatan yang
dapat diubah nilai resistansinya dengan cara mekanik (memutar/menggeser).
Potensiometer terdiri atas sebuah jalur atau track yang mempunyai resistansi menyeluruh yang konstan dengan sebuah penyapu (wiper) yang dapat bergerak sambil tetap bersentuhan dengan jalur atau track.
Pada tipe karbon, resistansi yang diperoleh dari jalur karbon diatur dengan
mengatur proporsi jumlah dan penempatan antara karbon dengan suatu bahan
isolator pada saat pembuatannya. Pengaturan ini akan menghasilkan jalur yang
mempunyai resistansi konstan di sepanjang jalurnya. Jalur yang demikian akan
menghasilkan hambatan jalur yang linear.
Ada dua macam potensiometer yang biasa digunakan dalam elektronika,
yaitu:
1. Potensiometer yang hambatannya berubah sesuai dengan skala logaritmis.
2. Potensiometer yang hambatannya berubah sesuai dengan skala linear.
Pada rangkaian elektronika potensiometer memiliki lambang, seperti pada
gambar 2.2 (a).
Vin
Vin Vout
Gambar 2.2 (a) Simbol potensiometer, (b) Perbandingan hambatan RA dan RB
pada potensiometer [2].
Besarnya tegangan keluaran Vout pada potensiometer ditentukan oleh perbandingan RA dan RB seperti pada persamaan 2.1 di bawah ini yang sesuai
dengan gambar 2.3 (b).
Vout = Vin x
RB RA
RA
+ (2.1)
2.2.1 Resolusi
Resolusi adalah perubahan terbesar dari input yang tidak akan mengakibatkan perubahan pada output. Dengan kata lain dapat didefinisikan sebagai perubahan terkecil dari input yang dapat menyebabkan perubahan pada output.
Pada resistor variabel dengan jalur terbuat dari karbon harga
resolusi akan sangat kecil karena partikel penyusun dari karbon sangat
kecil. Tegangan keluaran akan beretambah secara beertahap sebesar
tegangan yang digunakan dibagi jumlah perpindahan penyapu pada
variabel resistor dari posisi minimum sampai ke maksimum seperti pada
persamaan 2.1.
2.3 ADC (Analog to Digital Converter)
ADC (Analog to Digital Converter) adalah pengubah besaran analog ke digital. Pengubah ini akan mengubah besaran-besaran analog menjadi
bilangan-bilangan digital sehingga bisa diproses dengan komputer. Perubahan-perubahan
bisa dilihat misalnya pada voltmeter digital, sampling suara dengan komputer,
dan kamera digital.
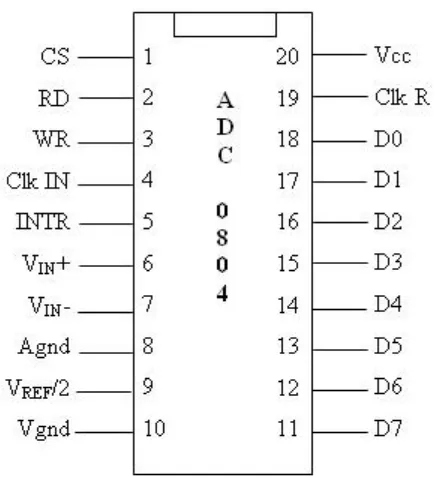
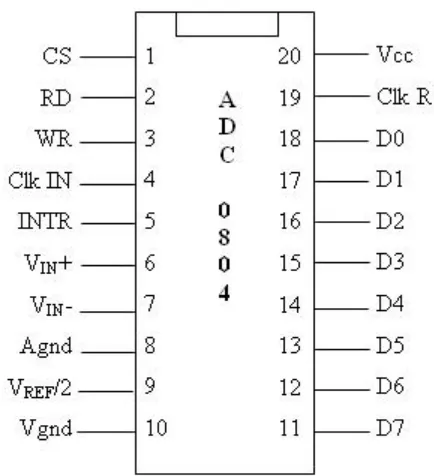
Untuk konfigurasi pin-pin ADC 0804 dapat dilihat pada gambar 2.3 di
bawah ini.
Gambar 2.3 Konfigurasi pin-pin IC ADC 0804.
Pada gambar 2.3 ditunjukkan konfigurasi pin-pin IC ADC 0804
dan masing-masing fungsi pin tersebut adalah sebagai berikut:
1. Pin1 dan pin 2 (CS dan RD).
Jika CS rendah dan RD tinggi, maka pin 11 sampai 18 (D0 – D7)
mengambang dan tidak mengeluarkan data digital.
2. Pin 3 (WR).
Merupakan sinyal konversi. Jika WR rendah, konversi mengalami
3. Pin 4 dan pin 19 (Clk In dan Clk R)
Frekuensi detak konverter harus terletak dalam daerah
frekuensi 100 KHz sampai 1460KHz.
4. Pin 5 (INTR)
Sinyal INTR merupakan sinyal selesai konversi. Bila INTR bernilai
tinggi maka hal itu akan menandakan konversi dimulai, dan
sebaliknya jika INTR bernilai rendah maka hal itu menandakan
konversi telah selesai.
5. Pin 6 [Vin(+)].
Merupakan tegangan masukan analog positif.
6. Pin 7 [Vin(-)].
Merupakan tegangan masukan analog negatif.
7. Pin 8 dan 10 (Agnd dan Vgnd).
Pin 8 merupakan pin Agnd dan pin 10 merupakan Vgnd. Kedua pin
ini harus dihubungkan ke tanah (ground). 8. Pin 9 (Vref/2).
Merupakan tegangan masukan analog maksimum, yaitu tegangan
yang menghasilkan suatu keluaran digital maksimum FFH. Apabila
pin 9 ini tidak dihubungkan maka Vref bernilai sama dengan tegangan
catu (Vcc).
9. Pin 11 – 18 (D7 – D0)
Pin 11 – 18 atau D7 – D0 merupakan keluaran ADC yang
10. Pin 20 (Vcc)
Sebagai masukan tegangan catu sebesar 5V.
2.3.1 Parameter ADC
Kuantitas penting dalam ADC adalah rentang perubahan tegangan
terkecil yang yang disebut dengan resolusi. Hal-hal yang juga perlu
diperhatikan dalam penggunaan ADC ini adalah tegangan maksimum yang
dapat dikonversikan oleh ADC dari rangkaian pengkondisi sinyal, resolusi,
pewaktu eksternal ADC, tipe keluaran, ketepatan dan waktu konversinya.
Beberapa karakteristik penting ADC :
1. Waktu konversi
2. Resolusi
3. Ketidaklinieran
4. Akurasi
Sesuai dengan rumusan pada datasheet ADC 0804, frekuensi clock
dengan konfigurasi typical pada datasheet.
fClk = ⎟ ⎠ ⎞ ⎜ ⎝ ⎛
RC
1
Resolusi ADC dinyatakan dengan persamaan 2.3.
255 V -V
Resolusi= ref(+) ref(-) (2.2)
(2.3)
Keterangan :
Resolusi = Ketelitian ADC
Vref(+) = Referensi tegangan atas
Sesuai dengan penggunaan typical ADC 0804 dengan 2
ref V
= 2,5 volt,
maka:
mV 19,6 Resolusi
255 0 -5 Resolusi
= =
Perubahan ADC tiap bit dinyatakan dengan persamaan 2.4.
ADC Resolusi
konversi Tegangan
Level=
Tegangan konversi = Level x Resolusi ADC (2.4)
(2.5)
2.4 Visual Basic 6.0
Visual Basic 6.0 [3] adalah salah satu perangkat lunak (software) untuk membangun aplikasi dalam lingkungan Windows. Dalam pengembangan aplikasi,
Visual Basic 6.0 menggunakan pendekatan visual untuk merancang user interface
dalam bentuk form, sedangkan untuk penyandiannya digunakan syntax bahasa Basic yang cenderung mudah dipelajari. Dengan kecanggihan yang ditawarkan
oleh Visual Basic 6.0 akan dirasakan begitu mudah dalam menyusun program
aplikasi dengan tampilan grafis yang menawan dalam waktu yang relatif singkat.
Sebaiknya kita perlu mengenal terlebih dahulu apa-apa saja yang terdapat pada
program Visual Basic 6.0. Jika program diaktifkan, tampilannya terlihat seperti
- Jendela Form Designer - Toolbox - Code
Editor
- Menu Bar - Toolbars - Project Expolrer - Jendela Properties - Form Layout
Gambar 2.4 Daerah Pengembangan Visual Basic 6.0.
2.4.1 Menu Bar
Menu Bar menampilkan perintah-perintah yamg dapat digunakan saat bekerja pada Visual Basic 6.0 seperti pada gambar 2.5. Secara
standar, menu bar memiliki pilihan File, Edit, View, Windows dan Help. Disamping itu, sehubungan dengan pemrograman, terdapat menu yang
dapat diakses, misalnya Project, Format atau Debug.
Gambar 2.5 Menu Bar
2.4.2 Toolbars
Fasilitas ini dapat mempercepat pangaksesan perintah-perintah
yang ada dalam pemrograman seperti pada gambar 2.6. Secara default, toolbars standar akan ditampilkan saat memulai Visual Basic 6.0 , toolbars
yang lain adalah Edit untuk editing, Form Editor untuk desain form,
Gambar 2.6 Toolbars.
2.4.3 Jendela Project Explorer
Menampilkan daftar form, serta objek lain yang ada dalam project
yang aktif. Sebuah project merupakan sekumpulan file yang digunakan untuk membangun sebuah aplikasi. Di belakang setiap nama tersebut di
dalam tanda kurung adalah nama file penyimpannya, seperti pada gambar 2.7.
Gambar 2.7 Jendela Project Explorer.
2.4.4 Jendela Properties
Jendela Properties dapat digunakan untuk mengatur properti sebuah objek atau kontrol yang sedang dipilih. Sebuah properties
merupakan karakteristik objek, seperti size (ukuran), caption (judul) atau
Gambar 2.8 Jendela Properties.
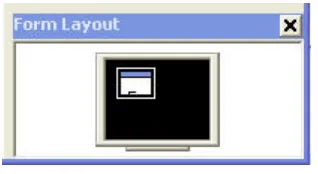
2.4.5 Jendela Form Layout
Form Layout seperti pada gambar 2.9 digunakan untuk mengontrol posisi form pada aplikasi yang sedang dibuat, dengan menggunakan sistem grafik dalam sebuah layar. Untuk mengubah posisinya, digunakan
cara drag-drop objek yang terlihat di jendela.
Gambar 2.9 Jendela Form Layout.
2.4.6 Jendela Form Designer
Jendela Form Designer digunakan untuk mengatur tampilan aplikasi yang akan dibuat, atau dengan kata lain sebagai tempat untuk
Gambar 2.10 Jendela Form Designer.
2.4.7 Toolbox
Sebuah jendela yang berisi tombol-tombol kontrol yang akan
digunakan untuk mendesain sebuah form seperti pada gambar 2.11.
Gambar 2.11 Toolbox.
2.4.8 Jendela Code Editor
Merupakan sebuah tampilan yang digunakan untuk memasukkan kode
Gambar 2.12 Jendela Code Editor.
2.5 Port Paralel DB25
Port paralel adalah terminal yang menghubungkan PC dengan dunia luar dan pengiriman datanya secara paralel atau bias bersama-sama dalam satuan
waktu. Port paralel merupakan suatu contra jack dengan dua puluh lima salurannya yang terbagi atas empat fungsi. Fungsi-fungsi tersebut yaitu :
1. Data (8 pin)
2. Control (4 pin) 3. Status (5 pin)
4. Ground (8 pin)
Gambar Port Paralel dapat dilihat pada gambar 2.13. Penjelasan untuk pin-pin
Gambar 2.13 Port paralel DB25.
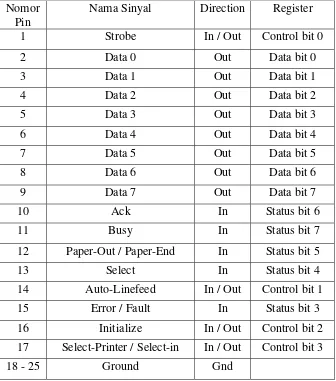
Tabel 2.1 Konfigurasi pin dan nama sinyal konektor paralel standar DB25 [4].
Nomor Pin
Nama Sinyal Direction Register
1 Strobe In / Out Control bit 0
2 Data 0 Out Data bit 0
3 Data 1 Out Data bit 1
4 Data 2 Out Data bit 2
5 Data 3 Out Data bit 3
6 Data 4 Out Data bit 4
7 Data 5 Out Data bit 5
8 Data 6 Out Data bit 6
9 Data 7 Out Data bit 7
10 Ack In Status bit 6
11 Busy In Status bit 7
12 Paper-Out / Paper-End In Status bit 5
13 Select In Status bit 4
14 Auto-Linefeed In / Out Control bit 1
15 Error / Fault In Status bit 3
16 Initialize In / Out Control bit 2
17 Select-Printer / Select-in In / Out Control bit 3
Dengan spesifikasi seperti pada tabel 2.1 maka kita mempunyai beberapa jalur
yang bisa kita gunakan untuk mengatur suatu alat yaitu:
1. 8 jalur data (alamat 378h / 888).
D0 sampai dengan D7 (pin 2 sampai dengan pin 9).
2. 5 jalur status (alamat 379h / 889).
S3 (pin 15), S4 (pin13), S5 (pin 12), S6 (pin 10) dan S7 (pin11).
3. 4 jalur control (alamat 37Ah / 890).
C0 (pin 1), C1 (pin 14), C2 (pin 16) dan C3 (pin 17).
2.6 Penggerak Pompa AC (Driver)
Untuk mengendalikan pompa AC menggunakan tegangan DC dapat
digunakan komponen elektronika dengan nama triac. Triac atau AC switch, merupakan saklar arus bolak–balik bentuk trioda (mempunyai 3 elektroda). Pada dasarnya triac terdiri dari dua SCR (Silicon Controlled Rectifier) yang terpasang paralel, dan dilengkapi dengan elektroda (pintu/gate). Gambar 2.14 adalah bentuk fisik triac.
Gambar 2.14 Bentuk fisik triac.
balik dan triac dipakai untuk pengaturan daya gelombang penuh. Triac
mempunyai tiga terminal, dua terminal utama yakni MT1 dan MT2 serta satu
gerbang G (gate). Terminal MT1 dan MT2 dirancang demikian sebab aliran arus adalah dua arah.
Jika terminal MT1 dan MT2 diberi tegangan AC dan gate dalam kondisi mengambang maka tidak ada arus yang dilewatkan oleh triac sampai pada tegangan breakover triac tercapai. Pada kondisi ini triac OFF. Pada saat gate
diberi arus positif atau negatif maka tegangan breakover ini akan turun. Semakin besar nilai arus yang masuk ke gate maka semakin rendah tegangan
breakover-nya. Pada kondisi ini triac menjadi ON selama tegangan pada MT1 dan MT2 diatas nol volt. Apabila tegangan pada MT1 dan MT2 sudah mencapai 0V maka
kondisi kerja triac akan berubah dari ON ke OFF. Ketika triac sudah menjadi
OFF kembali, triac akan selamanya OFF sampai ada arus trigger ke gate dan tegangan MT1 dan MT2 melebihi tegangan breakover-nya. Pada gambar 2.15 memperlihatkan daerah kerja triac.
2.7 Solid-State Relay [5]
Pada relay yang berjenis relay solid state (solid-state relay = SSR) ini tidak mempunyai kumparan dan kontak sesungguhnya dibandingkan dengan relai
elektromekanis (Electromechanics relay = EMR). Sebagai pengganti digunakan alat penghubungan semikonduktor seperti transistor bipolar, MOSFET, SCR, atau
triac. Solid-state Relay tidak mempunyai bagian yang berputar, relai tersebut tahan terhadap goncangan dan getaran serta ditutup rapat terhadap kotoran dan
kelembaban. SSR merupakan aplikasi pada pengisolasian rangkaian kontrol
tegangan-rendah dari rangkaian beban-daya-tinggi. Dioda yang memancarkan
cahaya(LED) yang digabungkan pada rangkaian input menyala mengeluarkan
cahaya apabila kondisi pada rangkaian benar-benar untuk mengaktifkan relai.
Cahaya LED pada fototransistor, yang kemudian menghantar, menyebabkan arus
trigger diberikan pada triac.
Solid-state Relay dapat didigunakan untuk mengontrol beban ac atau dc. Jika relai dirancang untuk mengontrol beban ac, digunakan triac untuk menghubungkan beban Iin. Tegangan kontrol untuk SSR dapat arus searah dan
bolak-balik, dan biasanya berkisar antara 3 sampai 32V untuk DC dan 80 dan
280V untuk AC. Arus beban maksimum mencapai 50A adalah mungkin pada
ukuran kerja tegangan Iin 120Vac, 240Vac, dan 480Vac. Pada sebagian besar
aplikasi, SSR digunakan sebagai perantara antara rangkaian kontrol tegangan
rendah dengan tegangan Iin ac yang lebih tinggi. SSR dapat dilihat pada gambar
Gambar 2.16 MOC30XX (SSR).
SSR mempunyai beberapa keuntungan dibandingkan dengan EMR. SSR
lebih terpercaya dan mempunyai umur pemakaian yang lebih panjang. karena SSR
tidak mempunyai bagian yang berputar, Dapat juga digabungkan dengan
rangkaian transistor dan sirkuit ic. SSR tidak banyak menimbulkan interferensi
elektromagnetis. SSR lebih tahan terhadap goncangan dan terhadap getaran,
mempunyai waktu respon yang lebih cepat.
2.8 Penguat Tak Membalik (Non Inverting Amplifier)
Pada penguat tak membalik (non inverting amplifier) seperti digambarkan pada gambar 2.17, tegangan keluaran mempunyai polaritas yang sama dengan
tegangan masukan. Tahanan Rf dan Ri menghasilkan tegangan umpan balik VA
pada masukan membalik karena beda tegangan antara masukan membalik dan
masukan tak membalik adalah sama dengan nol, maka pada masukan membalik
VA = Vin (2.6)
Gambar 2.17 Non Inverting Amplifier.
Penguatan tegangan adalah tegangan masukan dikalikan dengan faktor penguatan,
dapat dituliskan sebagai berikut :
Vout = AV . Vin
Vout = AV . VA (2.7)
AV =
A out
V V
(2.8)
Tahanan Rf dan Ri merupakan pembagi tegangan untuk Vout, sehingga pada Ri
timbul tegangan VA sebesar :
VA = Vout . ⎟⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ + f i i R R R (2.9) out A V V = ⎟⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ + f i i R R R karena out A V V = V A 1
, maka AV =
A out V V = ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ + i f i R R R = ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ + i f R R
Tegangan keluaran dari penguat tak membalik ditentukan oleh persamaan :
Vout = ⎟⎟
⎠ ⎞ ⎜⎜
⎝ ⎛
+ i f
R R
1 .Vin (2.11)
Bila nilai Rf = Ri, maka besar penguatan tegangan yang terjadi sebesar :
Vout = 2 . Vin (2.12)
2.9 Tanggapan Sistem
Tanggapan sistem kontrol sering menunjukkan osilasi teredam sebelum
mencapai keadaan tunak. Dalam menentukan karakteristik tanggapan sistem
kontrol terhadap masukan tangga satuan, biasanya dicari parameter-parameter
berikut :
1. Waktu Tunda (Delay Time), td
Yaitu waktu yang diperlukan tanggapan mencapai setengah harga
akhir yang pertama kali.
2. Waktu Naik (Rise Time), tr
Yaitu waktu yang diperlukan tanggapan untuk naik dari 10% hingga
90%.
3. Waktu Penetapan (Settling Time), ts
Yaitu waktu yang diperlukan kurva tanggapan dan menetap dalam
daerah disekitar harga akhir yang ukurannya ditentukan dengan
4. Lewatan Maksimum (Maximum Overshoot), Mp
Yaitu harga puncak maksimum dari kurva respon yang diukur dari satu.
5. Waktu Puncak (Peak Time), tp
Yaitu waktu yang diperlukan respon untuk mencapai puncak lewatan yang pertama kali.
Untuk memperoleh nilai – nilai tersebut digunakan rumus : .…...(2.9)
Delay Time ( td ) = t50% - 0
Rise Time ( tr ) = t90% - t10%
Settling Time ( ts ) = t98% - 0
Persen lewatan maksimum = 100%
) c(
) c( c(tp)
x
3.1 Diagram Blok
Sensor ADC
Plant
Ketingian air
PC (Pengendali)
dan driver
Gambar 3.1 Blok diagram pengendali dan penampil ketinggian air berbasis PC.
Blok diagram dari bagian utama sistem pengendali dan penampil
ketinggian air berbasis PC ditunjukkan pada gambar 3.1. Masukan sensor adalah
perubahan hambatan pada potensiometer karena perubahan ketinggian permukaan
air. Perubahan hambatan akan menyebabkan perubahan tegangan pada keluaran
sensor. Sinyal tegangan keluaran sensor akan diubah dan disiapkan sehingga level
tegangan keluaran dapat diterima oleh PC, kemudian keluaran dari PC akan
masuk ke penggerak motor AC (driver). Tegangan keluaran dari driver akan menjadi masukan dari pompa yang dikendalikan oleh set point yang sudah ditentukan sebelumnya. Gambaran fisik sistem pengendali dan penampil
ketinggian air berbasis PC ini secara skematis ditunjukkan pada gambar 3.2.
ADC
Driver Pompa
PC
Sensor
Kran
Gambar 3.2 Konfigurasi fisik sistem pengendali dan penampil ketinggian
air berbasis PC.
3.2 Pemodelan Elemen-elemen Sistem Pengendali Ketinggian Air
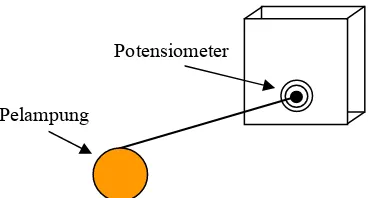
3.2.1 Pelampung
Untuk mengetahui tinggi rendahnya debit air digunakan
pelampung. Pelampung dihubungkan ke sebuah potensiometer dan akan
memutar potensiometer tersebut secara variabel pada sensor ketinggian air.
Pelampung ini akan bergerak ke atas dan ke bawah sesuai dengan tinggi
air dalam bak air. Pada gambar 3.3 ditunjukkan rancangan dari sistem
pelampung sebagai komponen sensor air.
Potensiometer
Pelampung
3.2.2 Sensor
Sensor yang digunakan adalah potensiometer. Perubahan level
ketinggian permukaan air akan sebanding dengan perubahan hambatan
pada potensiometer. Adapun sensor ini berada pada tangki atas.
VCC
POT
1
3
2 V Out sensor
POT1
Gambar 3.4 Rangkaian sensor.
Potensiometer yang digunakan sebagai sensor sebesar 10kΩ.
dengan menggunakan catu daya sebesar 5V data keluaran tegangan seperti
pada tabel 3.1. Gambar rangkaian sensor menggunakan potensiometer
seperti pada gambar 3.4.
Tabel 3.1 Data pengukuran awal 1.
Ketinggian air (cm)
Tegangan keluaran sensor (V)
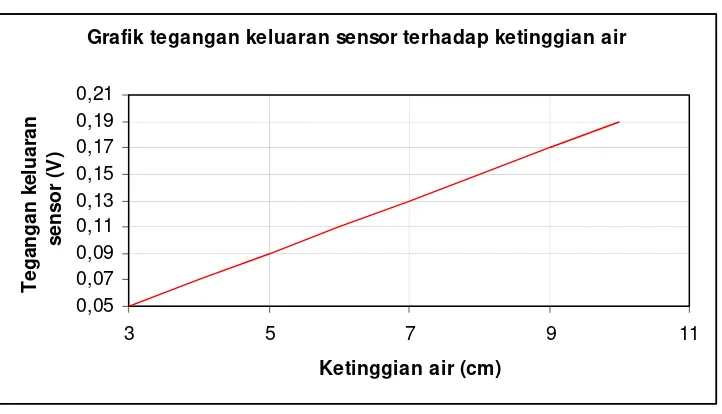
Grafik tegangan keluaran sensor terhadap ketinggian air 0,05 0,07 0,09 0,11 0,13 0,15 0,17 0,19 0,21
3 5 7 9
Ketinggian air (cm)
Te ga nga n k e lua ra n s e ns or ( V ) 11
Gambar 3.5 Grafik tegangan keluaran sensor terhadap ketinggian air.
Untuk mendapatkan tegangan keluaran linier yang sebanding
dengan perubahan ketinggian air maka dibutuhkan ketepatan dalam
meletakkan sensor pada plant seperti pada gambar 3.2. Berdasarkan tabel
data 3.1 dan gambar grafik 3.5 didapatkan kenaikan tegangan keluaran
sebesar 0,02V/cm.
3.2.3 Penguat Tegangan
Pada penguat tegangan digunakan rangkaian non inverting amplifier. Rangkaian tersebut sebagai penguat dari keluaran sensor, tegangan keluaran yang keluar dari sensor kecil, maka akan dikuatkan
sebesar 2 kali agar menjadi cukup besar. Dengan mengacu persamaan 2.10
dan gambar 2.16 dapat dihitung nilai hambatannya.
Av = ⎟⎟
⎠ ⎞ ⎜⎜ ⎝ ⎛ + i f R R 1
2 = ⎟⎟
1 = ⎟⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ k Rf 1
Rf = 1kΩ
Dengan nilai Ri ditentukan 1kΩ, maka dari perhitungan diperoleh nilai Rf
adalah 1kΩ dan di rangkaian menjadi seperti gambar 3.4.
1k 1k
LM358
Vcc Gnd
Gambar 3.6 Penguat tegangan menggunakan potensiometer.
Berdasarkan data dari keluaran sensor pada plant sesuai dengan suhu yang ditentukan didapatkan besaran tegangan. Dengan mengacu
persamaan 2.11 dan gambar 3.6, maka besaran tegangan akan dikuatkan
terlebih dahulu sehingga didapatkan nilai tegangan sebesar :
Ketinggian air 4cm
Vout = ⎟⎟
⎠ ⎞ ⎜⎜ ⎝ ⎛ + i f R R
1 .Vin
= V
k k 07 , 0 . 1 1 1 ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ Ω Ω +
= 2 . 0,07 V
= 0,14V
Ketinggian air 7cm = 0,26V
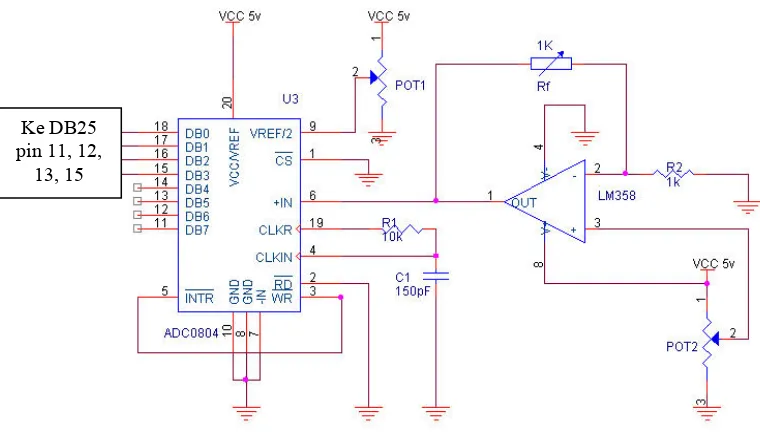
3.2.4 Antarmuka Rangkaian Sensor dan Rangkaian Penguat
Tegangan dengan ADC 0804.
Dalam aplikasinya antarmuka sensor menggunakan potensiometer
dengan ADC 0804 dapat ditunjukkan pada gambar 3.7. Digunakan nilai
resistor dan kapasitor yang ada di pasaran yaitu R1 = 10kΩ dan C1 =
150pF yang mendekati nilai fClk ADC 0804 pada datasheet yaitu 640kHz. Penentuan nilai resistor dan kapasitor adalah bebas, asalkan besarnya fClk
yang dihasilkan bernilai antara 100kHz – 800kHz yang merupakan
frekuensi detak dari CPU
Ke DB25 pin 11, 12,
13, 15
Gambar 3.7 Antarmuka sensor dan penguat tegangan dengan ADC 0804.
Berdasarkan fungsi pin ADC 0804 dapat ditentukan beberapa hal
berikut:
1. Keluaran rangkaian penguat tegangan yang berubah-ubah sesuai
masukan bagi pin VIN+, karena pin VIN+ adalah masukan tegangan
analog positif.
2. ADC 0804 pada rangkaian ini berfungsi untuk mengubah tegangan
analog ke digital. Dalam hal ini tegangan analog yang dimaksud
adalah tegangan keluaran dari sensor. Tegangan analog dari sensor
akan diubah menjadi keluaran digital. Tegangan pada kasus ini
berubah dari 0,05V sampai dengan 1,19V. Dari tabel 3.2 didapatkan
data kenaikan tegangan keluaran sensor sebesar 0,02V/cm.
Tabel 3.2 Data pengukuran awal 2.
Ketinggian air (cm)
V Out sensor (V) Tegangan masukan ADC (V)
3 0,05 0,10
4 0,07 0,14
5 0,09 0,18
6 0,11 0,22
7 0,13 0,26
8 0,15 0,30
9 0,17 0,34
10 0,19 0,38
3. Untuk menentukan besarnya tegangan yang masuk ke pin 9 (Vref/2)
dengan resolusi ADC sebesar 20mV, dapat ditentukan menggunakan
cara sebagai berikut:
Vref(+) -Vref(-) = Resolusi . 255
Vref(+) = Resolusi . 255 + Vref(-)
= 19,6mV . 255 + 0,05
= 5,048V
Vref /2 =
2 05 , 0 048 ,
5 −
= 2,499V
3.2.5 Analog to Digital Converter (ADC 0804)
ADC 0804 digunakan sebagai pengubah masukan analog menjadi
keluaran digital. Konfigurasi pin-pin IC ADC 0804 dapat dilihat pada
gambar 3.8.
Gambar 3.8 Konfigurasi pin-pin IC ADC 0804.
ADC ini hanya membutuhkan dua komponen luar sebagai
pembangkit frekuensi (Clk R dan Clk In) yaitu sebuah hambatan dan
sebuah kapasitor. Bila menggunakan R1 =10kΩ dan C1 = 150pF, maka
besarnya nilai fClk dapat dihitung dengan persamaan 2.2 yaitu :
fClk =
pF 150 K
10 1 , 1
1 × Ω
×
Besarnya nilai fCLK harus antara 100kHz – 800kHz yang
merupakan frekuensi detak dari CPU
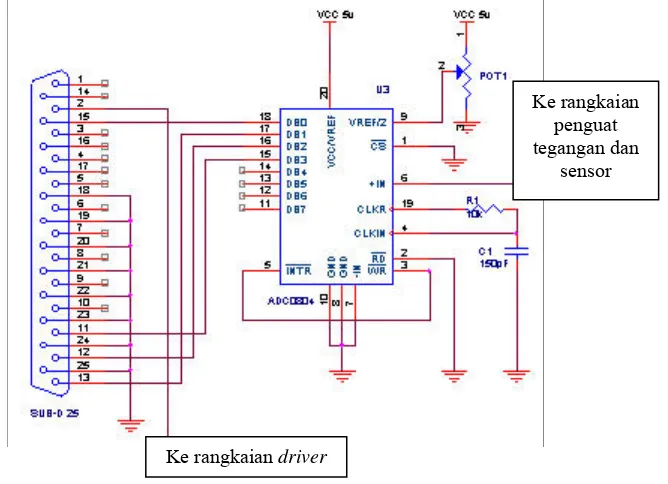
3.2.6 Antarmuka DB25 dengan ADC 0804.
Dalam aplikasinya antarmuka DB25 dengan ADC 0804 dapat
ditunjukkan pada gambar 3.9. Nilai resistor dan kapasitor yang digunakan
sesuai dengan nilai fCLK ADC 0804 pada datasheet.
Ke rangkaian penguat tegangan dan
sensor
Ke rangkaian driver
Gambar 3.9 Antarmuka DB25 dengan ADC 0804.
Berdasarkan gambar 3.9 dapat dijelaskan beberapa hal berikut:
1. Pin 2 DB25 adalah port output. Pada perancangan, pin 2 DB25 ini digunakan sebagai jalur output untuk mengendalikan driver.
12 terhubung dengan pin D2 ADC, pin 11 terhubung dengan pin D3
ADC.
3.2.7 Pengendali Mengunakan PC
Untuk mengendalikan ketinggian air pada plant digunakan PC.
Program yang dibuat menggunakan bahasa pemrograman Visual Basic 6.0.
Program yang dibuat mencakup beberapa hal berikut:
1. Program memilih set point ketinggian air.
2. Program menampilkan data berupa angka dan gambar.
3. Program membaca data dari ADC 0804.
4. Program untuk mereset proses pengendalian ketingian air.
5. Untuk antarmuka antara PC dengan plant menggunakan DB25.
3.2.8 Penggerak Pompa (Driver)
Penggerak pompa berfungsi untuk mengubah keluaran dari elemen
ADC dengan rentang antara 0 hingga 5V menjadi tegangan yang
diperlukan untuk menggerakkan pompa. Tegangan yang dibutuhkan untuk
mencatu sebesar 220V.
Gambar rangkaian driver untuk menggerakkan pompa seperti pada
gambar 3.10. Berdasarkan acuan data sheet dimana nilai arus masukan yang mengalir adalah 10 mA, maka nilai R3 adalah :
Vin – 1,5V – 10mA . R3 = 0
5V – 1,5V – 10mA . R3 = 0
3,5V = 10mA . R3
R3 =
mA V
10 5 , 3
Ke pin 2 DB25
Gambar 3.10 Rangkaian penggerak pompa (driver).
3.2.9 Aktuator (Pompa)
Pompa digunakan untuk mengalirkan air dari tangki bawah ke
tangki atas. Sinyal masukan pada elemen ini berupa tegangan AC 220V
dan keluaranya berupa debit air. Pemodelan dilakukan melalui percobaan
dengan mengukur tegangan masukan dan debit pompa.
3.3 Perancangan Software
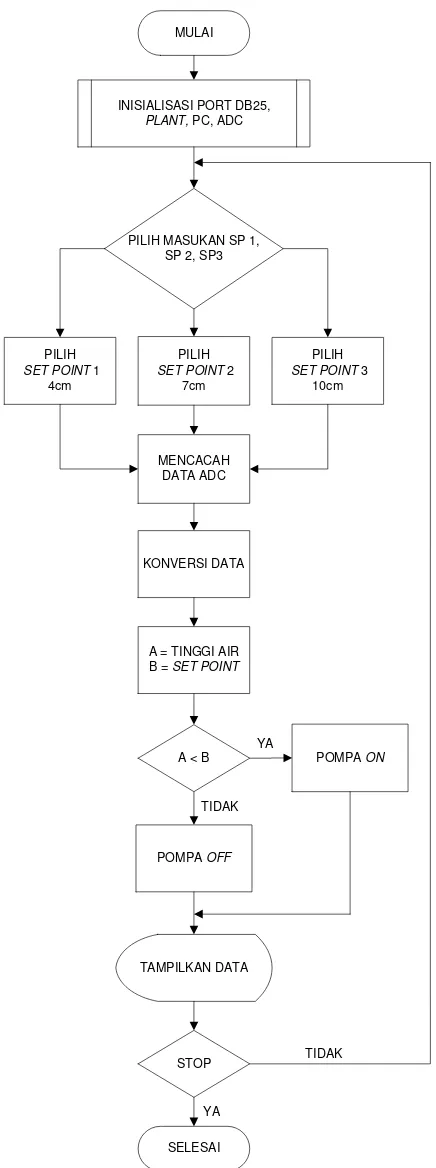
3.3.1 Diagram Alir Keseluruhan Sistem Kerja
Proses pengendalian ketinggian air menggunakan program Visual
MULAI
INISIALISASI PORT DB25,
PLANT, PC, ADC
PILIH MASUKAN SP 1, SP 2, SP3
PILIH
SET POINT 1 4cm
PILIH
SET POINT 2 7cm
PILIH
SET POINT 3 10cm
TAMPILKAN DATA
STOP
SELESAI MENCACAH
DATA ADC
KONVERSI DATA
A = TINGGI AIR B = SET POINT
POMPA ON
POMPA OFF
YA
TIDAK TIDAK
YA A < B
Program utama melakukan proses inisialisasi port DB25, plant, PC dan pembacaan data dari ADC. Pemilihan set point, mengendalikan driver, dan menampilkan data pada monitor menggunakan program Visual Basic
6.0.
1. Inisialisasi.
Pada bagian ini, inisialisasi dilakukan untuk pengesetan awal
keseluruhan Port, ADC. Proses inisialisasi ADC menggunakan
subrutin sendiri karena Visual Basic 6.0 harus melakukan proses awal operasi tertentu agar ADC dan Visual Basic 6.0 dapat
melakukan komunikasi data.
2. Pemilihan masukan set point.
Pemilhan set point ini dilakukan untuk menentukan ketinggian air yang dipilih.
3. Mencacah data ADC.
Proses ini berfungsi untuk membaca data biner dari ADC.
4. Konversi data.
Proses ini adalah proses untuk mengubah data biner ADC sehingga
dapat diterima oleh pengendali.
5. Tampilkan data.
Proses ini berfungsi untuk menampilkan data ke layar monitor.
Data yang akan ditampilkan ke layar monitor yaitu berupa angka
3.3.2 Program Penampil Ketinggian Air
Tampilan awal program terdiri dari tombol “Start” untuk menuju
program utama dan menu “Help” yang berisi panduan untuk menjalankan
program.
Gambar 3.12 Tampilan awal program.
Tampilan program utama pengendali dan penampil ketinggian air
terdiri dari beberapa tombol yang memiliki fungsi masing-masing.
Diantaranya adalah sebagai berikut:
1. Tombol “On”.
Tombol “On” berfungsi untuk menjalankan program.
2. Tombol “Off”.
Tombol “Off” berfungsi untuk menghentikan program, dan pompa
akan berhenti.
3. Option button.
Tombol option button berfungsi untuk memilih ketinggian air yang terdiri dari tiga pilihan, yaitu bawah, tengah, atas.. Jika option button “BAWAH” dipilih maka akan ditampilkan nilai ketinggian air set point 1 (4cm), jika optionbutton tengah dipilih maka akan ditampilkan nilai ketinggian air set point 2 (7cm), jika option button atas dipilih maka akan ditampilkan nilai ketinggian air set point 3 (10cm).
4. Tombol “Exit”.
Dalam bab ini dibahas perihal pengamatan atas rancangan pengendali dan
penampil ketinggian air berbasis PC dengan menggunakan program Visual Basic,
yang berupa pengujian perangkat keras maupun pengamatan perangkat lunak.
Pengamatan perangkat keras meliputi pengamatan data untuk tegangan, waktu,
level air dan pengamatan perangkat lunak berupa pengamatan program Visual
Basic.
Pengujian, pengamatan dan pengambilan data dengan menggunakan
multimeter digital, komputer dengan spesifikasi : AMD Duron 900 MHz, RAM
256 MB, Hardisk 80 Gb, dengan operating system Microsoft Windows XP Profesional Version 2002 SP1.
4.1 Prinsip Kerja dan Cara Pengoperasian Alat
Prinsip kerja dari alat pengendali dan penampil ketinggian air berbasis PC
ini adalah sebagai pengatur ketinggian air pada dua buah bak penampungan air
yang hasilnya akan divisualisasikan melalui monitor pada PC yang diolah dengan
program Visual Basic. Pada sistem tersebut terdapat dua buah bak yaitu bak atas
dan bak bagian bawah. Bak atas berfungsi sebagai bak objek yang akan diukur
ketinggian airnya, sedangkan bak bagian bawah digunakan sebagai sumber untuk
mengisi air pada bak atas. Pompa air digunakan untuk mengalirkan air dari bak
bawah ke bak atas. Untuk menentukan ketinggian air pada bak bagian atas
dipasang sensor berupa potensiometer yang berfungsi sebagai pendeteksi
ketinggian air. Ketinggian air diatur sesuai dengan nilai set point yang diinginkan. Pada alat ini terdapat tiga buah set point,yaitu 4cm, 7cm dan 10cm yang masing – masing set point dapat dipilih dengan menekan tombol option button yang ditampilkan pada monitor PC.
Adapun bentuk alat pengendali dan penampil ketinggian air berbasis PC
dapat dilihat pada gambar 4.1 dibawah ini.
4.2 Pengamatan Tanggapan Sistem
Pengamatan dilakukan dengan dua keadaan. Keadaan pertama yaitu kran
pada bak atas ditutup (tanpa gangguan), keadaaan yang kedua kran pada bak atas
dibuka (terdapat gangguan).
4.2.1 Data Pengamatan Set Point pada Keadaan Kran Tertutup
Untuk set point pertama (ketinggian 4cm) pengukuran pertama dilakukan dari kondisi ketinggian awal yaitu 3cm. Saat tombol option button pertama (bawah, 4cm) dipilih maka ketinggian air akan berubah dari 3cm sampai 4cm dan akan ditampilkan gambar dan nilai ketinggian
air pada monitor PC. Pengamatan dilakukan pada saat ketinggian 3cm
sampai 4cm. Data pengamatan diambil dengan keadaan kran ditutup agar
dapat diketahui apakah pengendali bisa mencapai titik stabil. Pada tabel
4.1 ditunjukkan data pengamatan ketinggian air terhadap waktu untuk set point pertama (4cm) saat kran ditutup.
Tabel 4.1 Data pengamatan untuk set point 4cm.
Waktu (s)
Ketinggian Air (cm)
Tegangan keluaran sensor (V)
0 3 0,05
8,94 4 0,07
11,65 4 0,07
14,45 4 0,07
17,33 4 0,07
Berdasarkan data tabel 4.1, maka dapat diperoleh gambar 4.2 yang
menunjukkan grafik hubungan antara ketinggian air terhadap waktu pada
Set Point Pertama (4cm) 3 3,2 3,4 3,6 3,8 4 4,2
0 2 4 6 8 10 12 14 16 18 20
Waktu (s) K e ti nggi a n A ir ( c m )
Gambar 4.2 Grafik pengamatan untuk set point pertama (4cm).
Dari grafik gambar 4.2 dapat diketahui tanggapan sistem
pengendali pada set point pertama bersifat stabil dan tidak terdapat steady-state error yaitu mencapai ketinggian 4cm, dengan karakteristik seperti yang terlihat pada gambar 4.3.
Set Point Pertama (4cm)
3 3,2 3,4 3,6 3,8 4 4,2
0 2 4 6 8 10 12 14 16 18 20
Waktu (s) K e ti nggi a n A ir ( c m ) ts tr td
Gambar 4.3 Tanggapan sistem untuk set point pertama (4cm).
Untuk mencari karakteristik sistem yaitu delay time(td), rise time
(tr) dan settling time(ts) pada set point pertama (4cm), diperoleh dengan
td = t50% - t0%
= t[3cm + 50%(4cm - 3cm)]- t[0]
= t 3,5 cm
≅ 4,3s
tr = t90% - t10%
t90% = t[3cm + 90%(4cm –3cm)]
= t 3,9cm
≅ 8,5s
t10% = t[3cm + 10%(4cm - 3cm)]
= t 3,1cm
≅ 0,9s
maka nilai tr = 8,5s – 0,9s
≅ 7,6s
ts = t[3cm + 98%(4cm – 3cm)]
= t 3,98cm
≅ 8,7s
Error steady state = 100 4
4 4− ×
%
= 0 %
Karena tidak terdapat gangguan pada sistem, maka sistem tidak
mengalami osilasi. Contoh perhitungan error osilasi untuk set point
Error Osilasi =
( )
100% cm4 cm 4
-4 ×
= 0%
Untuk set point kedua (ketinggian 7cm) pengukuran pertama dilakukan dari kondisi ketinggian awal yaitu 3cm. Saat tombol option button kedua (tengah, 7cm) dipilih maka ketinggian air akan berubah dari 3cm sampai 7cm dan akan ditampilkan gambar dan nilai ketinggian air
pada monitor PC. Pengamatan dilakukan pada saat ketinggian 3cm sampai
7cm. Data pengamatan diambil dengan keadaan kran ditutup agar dapat
diketahui apakah pengendali bisa mencapai titik stabil. Pada tabel 4.2
ditunjukkan data pengamatan ketinggian air terhadap waktu untuk set point kedua (7cm) saat kran ditutup.
Tabel 4.2 Data pengamatan untuk set point 7cm.
Waktu (s)
Ketinggian Air (cm)
Tegangan keluaran sensor (V)
0 3 0,05
7,33 4 0,07
15,04 5 0,09
22,54 6 0,011
29,79 7 0,013
36,67 7 0,013
43,58 7 0,013
51,72 7 0,013
Berdasarkan data tabel 4.2, maka dapat diperoleh gambar 4.4 yang
menunjukkan grafik hubungan antara ketinggian air terhadap waktu pada
Set Point Kedua (7cm) 3 4 5 6 7 8
0 5 10 15 20 25 30 35 40 45 50 55
Waktu (s) K e ti nggi a n A ir ( c m )
Gambar 4.4 Grafik pengamatan untuk set point kedua (7cm).
Dari grafik gambar 4.4 dapat diketahui tanggapan sistem
pengendali pada set point kedua bersifat stabil dan tidak terdapat steady-state error yaitu mencapai ketinggian 7cm, dengan karakteristik seperti yang terlihat pada gambar 4.5.
Set Point Kedua (7cm)
3 4 5 6 7 8
0 5 10 15 20 25 30 35 40 45 50 55
Waktu (s) K e ti nggi a n A ir ( c m ) ts tr td
Gambar 4.5 Tanggapan sistem untuk set point kedua (7cm).
Untuk mencari karakteristik sistem yaitu delay time(td), rise time
(tr) dan settling time(ts) pada set point kedua (7cm), diperoleh dengan
td = t50% - t0%
= t[3cm + 50%(7cm - 3cm)]- t[0]
= t 5 cm
15s
≅
tr = t90% - t10%
t90% = t[3cm + 90%(7cm –3cm)]
= t 6,6cm
≅ 27s
t10% = t[3cm + 10%(7cm - 3cm)]
= t 3,4cm
≅ 2,9s
maka nilai tr = 27s – 2,9s
≅ 24,1s
ts = t[3cm + 98%(7cm – 3cm)]
= t 6,92cm
≅ 28,2s
Error steady state = 100 7
7 7
× −
%
= 0 %
pada monitor PC. Pengamatan dilakukan pada saat ketinggian 3cm sampai
10cm. Data pengamatan diambil dengan keadaan kran ditutup agar dapat
diketahui apakah pengendali bisa mencapai titik stabil. Pada tabel 4.3
ditunjukkan data pengamatan ketinggian air terhadap waktu untuk set point ketiga (10cm) saat kran ditutup.
Tabel 4.3 Data pengamatan untuk set point 10cm.
Waktu (s) Ketinggian Air (cm) Tegangan keluaran sensor (V)
0 3 0,05
8,24 4 0,07
14,65 5 0,09
21,24 6 0,011
28,66 7 0,013
36,37 8 0.015
44,38 9 0,017
51,44 9,8 0,019
57,57 9,8 0,019
65,73 9,8 0,019
73,48 9,8 0,019
Berdasarkan data tabel 4.3, maka dapat diperoleh gambar 4.6 yang
menunjukkan grafik hubungan antara ketinggian air terhadap waktu pada
saat kran pembuangan ditutup.
Set Point Ketiga (10cm)
3 4 5 6 7 8 9 10 11
0 10 20 30 40 50 60 70 80
Waktu (s) K e ti nggi a n A ir ( c m)
Dari grafik dan data di atas dapat diketahui bahwa sistem bersifat
stabil, terbukti dengan keluaran sistem dapat mencapai kondisi akhir yang
sama dengan set point dengan steady-state error = 2% (masih dalam batas toleransi kestabilan sistem ± 5%)
Set Point Ketiga (10cm)
3 4 5 6 7 8 9 10 11
0 10 20 30 40 50 60 70 80
Waktu (s)
K
e
ti
nggi
a
n A
ir
(
c
m
)
ts
tr td
Gambar 4.7 Tanggapan sistem untuk set point ketiga (10cm).
Untuk mencari karakteristik sistem yaitu delay time(td), rise time
(tr) dan settling time(ts) pada set point ketiga (10cm), diperoleh dengan
perhitungan sebagai berikut:
td = t50% - t0%
= t[3cm + 50%(10cm - 3cm)]- t[0]
= t 6,5 cm
24,8s
≅
tr = t90% - t10%
t90% = t[3cm + 90%(10cm –3cm)]
= t 9,3cm
t10% = t[3cm + 10%(10cm - 3cm)]
= t 3,7cm
≅ 2,9s
maka nilai tr = 46,12s – 3,7s
≅ 42,42s
ts = t[3cm + 98%(10cm – 3cm)]
= t 9,8cm
≅ 51,4s
Error steady state = 100 10
8 , 9 10
× −
%
= 2 %
4.2.2 Data Pengamatan Set Point pada Keadaan Kran Terbuka
Untuk set point pertama (ketinggian 4cm) pengukuran pertama dilakukan dari kondisi ketinggian awal yaitu 3cm. Pengamatan dilakukan
pada saat ketinggian 3cm sampai 4cm. Data pengamatan diambil dengan
keadaan kran dibuka maksimal agar dapat diketahui cepat atau lambat
tanggapan pengendali. Pada tabel 4.4 ditunjukkan data pengamatan