Motor AC Satu Phase dan
Tiga Phase
Puji Iswandi
4211301025
POLITEKNIK NEGERI BATAM
BATAM
1. Landasan Teori
Pada era industri modern saat ini, kebutuhan terhadap alat produksi yang
tepat guna sangat diperlukan untuk dapat meningkatkan effesiensi waktu dan
biaya. Sebagian besar alat industri menggunakan tenaga listrik sebagai energi
penggerak utamanya, dan di berbagai perindustrian banyak menggunakan
mesin-mesin dengan penggerak uatamanya adalah Motor AC Phasa Satu. Yang
mana pada umumnya digunakan pada mesin produksi seperti mesin bubut,
mesin bor, dan sebagainya. Faktor yang menyebabkan hal tersebut karena
motor induksi memiliki beberapa kelebihan antara lain: harga lebih murah,
mudah dalam perawatan, konstruksi sederhana, tetapi motor induksi juga
memiliki kekurangan antara lain: motor induksi memiliki nilai slip (perbedaan
kecepatan putar medan stator terhadap kecepatan medan rotor) yang sangat
besar, dan motor induksi sulit dalam pengen-dalian kecepatan putarnya.
Berbagai jenis motor fase tunggal dibedakan oleh cara-cara yang mereka mulai.
Dibawah ini dalah jenis-jenis dari motor satu phasa sesuai dengan cara mereka
mulai :
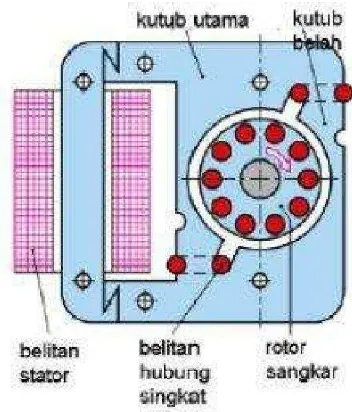
1. Motor Split Phase (Motor Fase Sebelah)
Motor fase belah terdiri atas dua kumparan stator yaitu kumparan utama
dan kumparan bantu. Antara kumparan utama dan kumparan bantu
berbeda arus 90 derajat listrik Dibawah ini adalah gambar dari motor
fase sebelah :
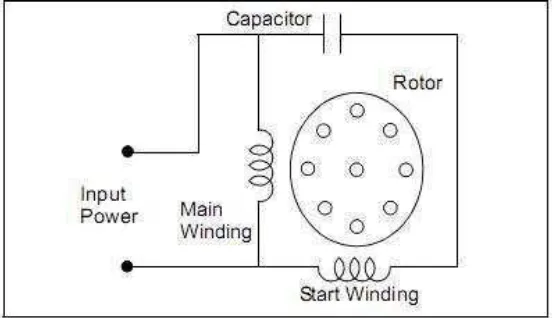
Motor split-tahap ini juga dikenal sebagai induksi start / jalankan motor
induksi. Ia memiliki dua gulungan: memulai dan berliku utama. Awal
berliku dibuat dengan lebih kecil kabel mengukur dan ternyata lebih
sedikit, relatif terhadap utama berliku untuk menciptakan lebih banyak
perlawanan, sehingga menempatkan memulai berkelok-kelok's lapangan
pada sudut yang berbeda dibandingkan dengan utama belitan yang
menyebabkan motor mulai berputar. Itu utama berkelok-kelok, yang
merupakan kawat berat, menjaga motor menjalankan sisa waktu.
Dibawah ini adalah gambar dari rangkaian motor fase sebelah :
Gambar 2. Rangkaian Motor Fase Sebelah
Torsi mulai rendah, biasanya 100% menjadi 175% dari rate
torsi. Motor menarik tinggi mulai saat ini, sekitar 700% menjadi
1.000% dari nilai arus. Itu torsi maksimum yang dihasilkan berkisar
dari 250% sampai 350% dari torsi rate (lihat Gambar 9 untuk
torsi-kecepatan kurva). Baik untuk aplikasi motor split-fase termasuk kecil
penggiling, kipas kecil dan blower dan rendah lainnya mulai torsi
aplikasi dengan kebutuhan daya dari 1 / 201 / 3 hp. Hindari
menggunakan jenis motor di setiap aplikasi membutuhkan tinggi pada /
siklus harga off atau torsi tinggi.
2. Motor Capasitor (Motor Kapasitor)
Ini adalah motor split-fasa diubah dengan kapasitor diseri
dengan mulai berkelok-kelok untuk memberikan memulai
"mendorong." Seperti motor fase-split, motor kapasitor mulai juga
kapasitor ketika motor mencapai sekitar 75% dari nilai kecepatan.
Karena kapasitor berada dalam seri dengan sirkuit mulai, itu
menciptakan torsi lebih awal, biasanya 200% sampai 400% dari rate
torsi. Dan, saat ini mulai biasanya 450% menjadi 575% dari, saat ini
dinilai jauh lebih rendah daripada fase-split karena kabel yang lebih
besar pada sirkuit mulai. Lihat Gambar 7 untuk kurva torsi-kecepatan.
Sebuah versi modifikasi motor mulai kapasitor adalah resistensi mulai
motor. Dalam tipe motor, mulai kapasitor digantikan oleh resistor.
Perlawanan mulai motor digunakan dalam aplikasi mana torsi mulai
kebutuhan kurang dari yang diberikan oleh kapasitor mulai motor.
Selain biaya, motor ini tidak menawarkan keuntungan yang besar atas
motor mulai kapasitor.
Gambar 3. Rangkaian Motor Kapsitor Biasa
Mereka digunakan dalam berbagai aplikasi belt-drive seperti
konveyor kecil, blower besar dan pompa, serta sebagai banyak
drive atau diarahkan langsung-aplikasi.
3. Motor Kapasitor Permanen
Sebuah kapasitor split permanen (PSC) motor jenis menjalankan
permanen kapasitor dihubungkan secara seri dengan mulai berliku-liku.
Hal ini membuat seorang pembantu mulai berliku berliku setelah motor
mencapai kecepatan berjalan. Karena kapasitor dijalankan harus
dirancang untuk terus menerus digunakan, tidak dapat memberikan
rendah, dari 30% sampai 150% dari torsi rate. motor PSC telah rendah
mulai saat ini, biasanya kurang dari 200% dari nilai arus, membuat
mereka sangat baik untuk aplikasi dengan tempat tinggi / off siklus
harga. Lihat Gambar 7 untuk kurva torsi-kecepatan. Motor PSC
memiliki beberapa keunggulan. Motor desain dengan mudah dapat
diubah untuk digunakan dengan pengendali kecepatan. Mereka juga
dapat didesain untuk efisiensi optimum dan High-Power Factor (PF)
pada beban nilai. Mereka dianggap paling dapat diandalkan fase-tunggal
motor, terutama karena tidak beralih mulai sentrifugal adalah
diperlukan. Dibawah ini adalah gambar rangkaian motor kapasitor
permanaen/tetap, yaitu :
Gambar 4. Rangkaian Motor Permanen / Tetap
Tetap split-kapasitor motor memiliki berbagai aplikasi tergantung pada
desain. Ini termasuk fans, blower dengan kebutuhan rendah dan torsi
mulai terputus-putus bersepeda menggunakan, seperti penyesuaian
mekanisme, gerbang operator dan pembuka pintu garasi.
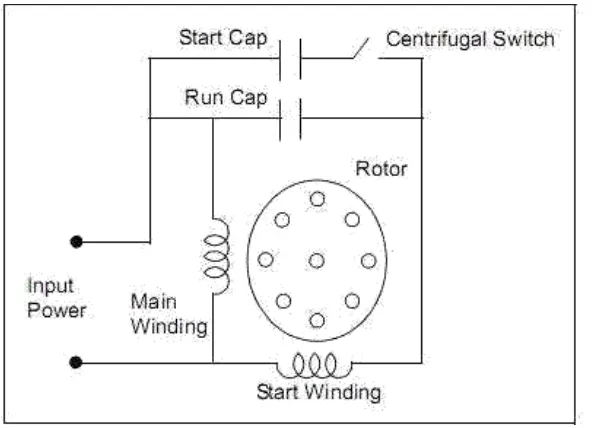
4. Motor Capasitor Star/Run
Motor ini memiliki kapasitor mulai ketik seri dengan bantu
berliku seperti motor mulai kapasitor untuk tinggi mulai torsi. Seperti
motor PSC itu, juga memiliki tipe menjalankan kapasitor yang ada di
seri dengan tambahan berliku setelah kapasitor mulai diaktifkan keluar
Gambar 5. Rangkaian Motor Kapasitor Star dan Run
Jenis motor dapat dirancang untuk menurunkan beban penuh arus dan
efisiensi yang lebih tinggi (lihat Gambar 9 untuk torquespeed kurva). motor ini
mahal karena untuk memulai dan menjalankan kapasitor, dan saklar
sentrifugal. Hal ini dapat menangani aplikasi terlalu menuntut untuk lain jenis
motor fase tunggal. Ini termasuk woodworking mesin, kompresor udara,
tekanan tinggi pompa air, pompa vakum dan torsi tinggi lainnya aplikasi yang
memerlukan 1-10 hp.
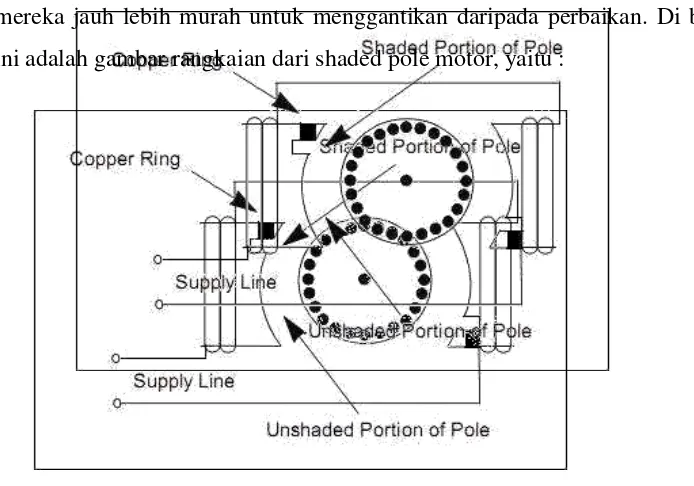
5. Shaded Pole Motor (Motor Bayangan Kutub)
Bayang-kutub motor hanya memiliki satu berliku utama dan tidak
mulai berliku. Memulai adalah dengan cara desain yang cincin loop tembaga
kontinu di sebagian kecil dari masing-masing kutub motor. Ini "warna" yang
sebagian kutub, menyebabkan medan magnet di daerah diarsir ketinggalan di
belakang lapangan di daerah unshaded. Itu reaksi dari dua bidang
mendapatkan poros berputar. Karena motor berbayang-tiang tidak memiliki
awal yang berkelok-kelok, mulai beralih atau kapasitor, itu adalah elektrik
sederhana dan murah. Juga, kecepatan dapat dikendalikan hanya dengan
memvariasikan tegangan, atau melalui multi-tap berliku. Mekanis,
pembangunan berbayang-kutub motor memungkinkan tinggi volume produksi.
mereka jauh lebih murah untuk menggantikan daripada perbaikan. Di bawah
ini adalah gambar rangkaian dari shaded pole motor, yaitu :
Gambar 6. Rangkaian Shaded Pole Motor
Motor berbayang-kutub memiliki banyak fitur yang positif tetapi juga
memiliki beberapa kelemahan. Ini rendah mulai torsi biasanya 25% sampai
75% dari nilai torsi. Hal ini motor slip tinggi dengan kecepatan berjalan 7%
sampai 10% di bawah kecepatan sinkron. Secara umum, efisiensi motor jenis
ini sangat rendah (di bawah 20%). Setelan biaya rendah awal motor
berbayang-tiang untuk rendah daya kuda atau aplikasi tugas ringan. Mungkin
terbesar mereka digunakan adalah multi-kecepatan kipas untuk penggunaan
rumah tangga. Tapi torsi rendah, efisiensi rendah dan kurang kokoh mekanik
fitur membuat motor berbayang-kutub tidak praktis untuk sebagian besar
industri atau komersial penggunaan, di mana tingkat yang lebih tinggi atau
siklus tugas kontinu norma.
Motor induksi tiga fasa merupakan motor elektrik yang paling banyak
digunakan dalam dunia industri. Salah satu kelemahan motor induksi yaitu memiliki
beberapa karakteristik parameter yang tidak linier, terutama resistansi rotor yang
memiliki nilai yang bervariasi untuk kondisi operasi yang berbeda, sehingga tidak
dapat mempertahankan kecepatannya secara konstan bila terjadi perubahan beban.
Oleh karena itu untuk mendapatkan kecepatan yang konstan dan peformansi sistem
yang lebih baik terhadap perubahan beban dibutuhkan suatu pengontrol. Motor
induksi 3 fasa adalah alat penggerak yang paling banyak digunakan dalam dunia
kokoh, harganya relatif murah, serta perawatannya yang mudah, sehingga motor
induksi mulai menggeser penggunaan motor DC pada industri. Motor induksi
memiliki beberapa parameter yang bersifat non-linier, terutama resistansi rotor, yang
memiliki nilai bervariasi untuk kondisi operasi yang berbeda. Hal ini yang
menyebabkan pengaturan pada motor induksi lebih rumit dibandingkan dengan motor
DC. Salah satu kelemahan dari motor induksi adalah tidak mampu mempertahankan
kecepatannya dengan konstan bila terjadi perubahan beban. Apabila terjadi
perubahan beban maka kecepatan motor induksi akan menurun. Untuk mendapatkan
kecepatan konstan serta memperbaiki kinerja motor induksi terhadap perubahan
beban, maka dibutuhkan suatu pengontrol. Penggunaan motor induksi tiga fasa di
beberapa industri membutuhkan performansi yang tinggi dari motor induksi untuk
dapat mempertahankan kecepatannya walaupun terjadi perubahan beban. Salah satu
contoh aplikasi motor induksi yaitu pada industri kertas. Pada industri kertas ini
untuk menghasilkan produk dengan kualitas yang baik, dimana ketebalan kertas yang
dihasilkan dapat merata membutuhkan ketelitian dan kecepatan yang konstan dari
motor penggeraknya, sedangkan pada motor induksi yang digunakan dapat terjadi
perubahan beban yang besar. Beberapa penelitian pengaturan kecepatan motor induksi
yang telah dilakukan antara lain oleh Brian heber, Longya Xu dan Yifan tang (1997)
menggunakan kontroller logika fuzzy untuk memperbaiki performansi kontroller PID
pada pengaturan kecepatan motor induksi. Demikian juga penelitian yang dilakukan
oleh Mohammed dkk(2000) mengembangkan kontroller fuzzy yang digunakan untuk
menala parameter PI. Kontroller fuzzy juga dikembangkan pada penelitian yang
dilakukan Chekkouri MR dkk (2002) dan Lakhdar M & Katia K (2004) dengan
melengkapi mekanisme adaptasi pada kontroller fuzzy pada pengaturan motor
induksi. Pada penelitian ini dirancang suatu pengaturan kecepatan motor induksi 3
fasa dengan menggunakan pengontrol adaptif fuzzy. Dengan adanya pengaturan
kecepatan ini diharapkan kecepatan motor induksi dapat konstan sesuai yang
diinginkan, walaupun mendapat perubahan beban, sehingga menghasilkan
performansi motor induksi yang tinggi .
2. Prinsip Kerja
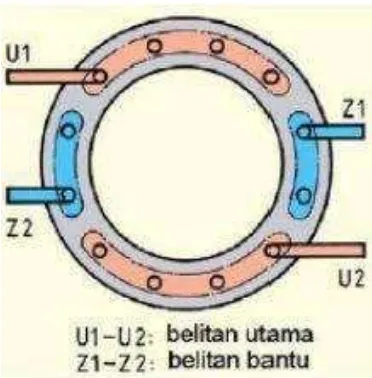
Motor AC satu fasa berbeda cara kerjanya dengan motor AC tiga fasa, dimana
pada motor AC tiga fasa untuk belitan statornya terdapat tiga belitan yang
yang menghasilkan putaran. Sedangkan pada motor satu fasa memiliki dua belitan
stator, yaitu belitan fasa utama (belitan U1-U2) dan belitan fasa bantu (belitan Z1-Z2),
lihat gambar1.
Gambar 7. Prinsip Medan Magnet Utama dan Medan magnet Bantu Motor Satu fasa
Belitan utama menggunakan penampang kawat tembaga lebih besar sehingga
memiliki impedansi lebih kecil. Sedangkan belitan bantu dibuat dari tembaga
berpenampang kecil dan jumlah belitannya lebih banyak, sehingga impedansinya
lebih besar dibanding impedansi belitan utama. Grafik arus belitan bantu ( I bantu )
dan arus belitan utama ( I utama ) berbeda fasa sebesar φ, hal ini disebabkan karena perbedaan besarnya impedansi kedua belitan tersebut. Perbedaan arus beda fasa ini
menyebabkan arus total, merupakan penjumlahan vektor arus utama dan arus bantu.
Gambar 8. grafik Gelombang arus medan bantu dan arus medan utama
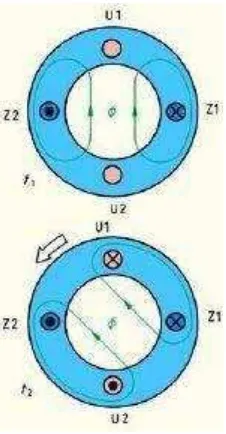
Gambar 9. Medan magnet pada Stator Motor satu fasa
Belitan bantu Z1-Z2 pertama dialiri arus Ibantu menghasilkan fluks magnet
Φtegak lurus, beberapa saat kemudian belitan utama U1-U2 dialiri arus utamaIutama. yang bernilai positip. Hasilnya adalah medan magnet yang bergesersebesar 45°
dengan arah berlawanan jarum jam. Kejadian ini berlangsung terussampai satu siklus
sinusoida, sehingga menghasilkan medan magnet yang berputarpada belitan statornya.
Rotor motor satu fasa sama dengan rotor motor tiga fasa yaitu
berbentukbatang-batang kawat yang ujung-ujungnya dihubung singkatkan dan menyerupaibentuk
Gambar 10. Rotor sangkar
Belitan rotor yang dipotong oleh medan putar stator, menghasilkan teganganinduksi,
interaksi antara medan putar stator dan medan magnet rotor akanmenghasilkan torsi
putar pada rotor.
Motor induksi merupakan motor arus bolak balik (ac) yang paling luas
penggunaannya. Penamaannya berasal dari kenyataan bahwa arus rotor motor ini
bukan diperoleh dari sumber tertentu, tetapi merupakan arus yang terinduksi sebagai
akibat adanya perbedaan relative antara putaran rotor dengan medan putar (rotating
magnetic field) yang dihasilkan oleh arus stator.
Belitan stator yang dihubungkan dengan suatu sumber tegangan tiga fasa akan
menghasilkan medan magnet yang berputar dengan kecepatan sinkron (ns = 120f/2p).
Medan putar pada stator tersebut akan memotong konduktor-konduktor pada rotor,
sehingga terinduksi arus; dan sesuai dengan Hukum Lentz, rotor pun akan ikut
berputar mengikuti medan putar stator. Perbedaan putaran relative antara stator dan
rotor disebut slip. Bertambahnya beban, akan memperbesar kopel motor, yang oleh karenanya akan memperbesar pula arus induksi pada rotor, sehingga slip antara
medan putar stator dan putaran rotor pun akan bertambah besar. Jadi , bila beban
motor bertambah, putaran rotor cenderung menurun. Dikenal dua tipe motor induksi
yaitu motor induksi dengan rotor belitan dan rotor sangkar.
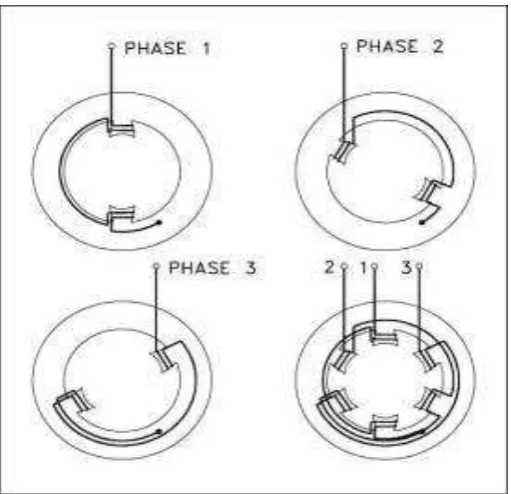
Sebelum kita membahas bagaimana rotating magnetic field (medan putar)
menyebabkan sebuah motor berputar, marilah kita tinjau bagaimana medan putar ini
dihasilkan. Gambar berikut menunjukkan sebuah stator tiga fasa dengan suplai arus
masing-masing fasa dililitkan dalam arah yang sama. Sepanjang waktu, medan magnet yang
dihasilkan oleh setiap fasa akan tergantung kepada arus yang mengalir melalui fasa
tersebut. Jika arus listrik yang melalui fasa tersebut adalah nol (zero), maka medan
magnet yang dihasilkan akan nol pula. Jika arus mengalir dengan harga maksimum,
maka medan magnet berada pada harga maksimum pula. Karena arus yang mengalir
pada system tiga fasa mempunyai perbedaan 120o, maka medan magnet yang
dihasilkan juga akan mempunyai perbedaan sudut sebesar 120o pula.
Ketiga medan magnet yang dihasilkan akan membentuk satu medan, yang
akan beraksi terhadap rotor. Untuk motor induksi, sebuah medan magnet
diinduksikan kepada rotor sesuai dengan polaritas medan magnet pada stator.
Karenanya, begitu medan magnet stator berputar, maka rotor juga berputar agar
bersesuaian dengan medan magnet stator.
Gambar 11. Motor 3 fasa
Pada sepanjang waktu, medan magnet dari masing-masing fasa
bergabung untuk menghasilkan medan magnet yang posisinya bergeser
hingga beberapa derajat. Pada akhir satu siklus arus bolak balik, medan
magnet tersebut telah bergeser hingga 360o, atau satu putaran. Dan karena
rotor juga mempunyai medan magnet berlawanan arah yang diinduksikan
kepadanya, rotor juga akan berputar hingga satu putaran. Penjelasan
dijelaskan pada gambar di bawah dengan “menghentikan” medan tersebut pada enam posisi. Tiga posisi ditandai dengan interval 60o pada gelombang
sinus yang mewakili arus yang mengalir pada tiga fasa A,B, dan C. Jika arus
mengalir dalam suatu fasa adalah positif, medan magnet akan menimbulkan
kutub utara pada kutub stator yang ditandai dengan A’, B’, dan C’.
3. Rangkaian Ekuivalen Motor Ac
Motor induksi satu fasa terdiri kumparan stator dan kumparan rotor.
Kumparan stator dan rotor masing-masing terdiri dari parameter resistansi
“R’, reaktansi “jX”dan lilitan penguat “N”. rangkaian ekivalen dari motor
induski satu fasa dapat dilihat pada gambar di bawah ini.
Nilai arus suber bolak-balik satu fasa dapat dirumuskan sebagai berikut :
I1 = IØ + I2’ Besarnya arus pemaknitan IØ yang timbul akibat adanya induksi yang terjadi antara
medan stator dan rotor adalah :
IØ = Ir + Im
Ggl yang dihasilkan akibat interaksi induksi medan magnet antara stator dan
rotor yang masing-masing sebesar E1 dan E2 adalah :
Gambar 13. Rangkaian pengganti motor induksi satu phase.
E1 = I2 (Rs +jXs)
Rr
E1 = I2 + jXr
Impedansi pada kumparan motor stator dan rotor masing-masing adalah : jXs = jws Ls jXr
= jwr Lr
Telah disebutkan sebelumnya bahwa motor induksi identik dengan sebuah
transformator, tentu saja dengan demikian rangkaian ekivalen motor induksi sama
dengan rangkaian ekivalen transformator. Perbedaan yang ada hanyalah, karena pada
kenyataannya bahwa kumparan rotor (kumparan sekunder pada transformator) dari
motor induksi berputar, yang mana berfungsi untuk menghasilkan daya mekanik.
Awal dari rangkaian ekivalen motor induksi dihasilkan dengan cara yang sama
sebagaimana halnya pada transformator. Semua parameter-parameter rangkaian
ekivalen yang akan dijelaskan berikut mempunyai nilai-nilai perfasa.
Rangkaian Ekivalen Stator
Gelombang fluks pada celah udara yang berputar dengan kecepatan sinkron
membangkitkan ggl lawan tiga fasa yang seimbang di dalam fasa-fasa stator.
Besarnya tegangan terminal stator berbeda dengan ggl lawan sebesar jatuh
tegangan pada impedansi bocor stator , sehingga dapat dinyatakan
dengan persamaan :
………(2.12)
dimana,
= tegangan terminal stator (Volt)
= arus stator (Ampere)
= tahanan efektif stator (Ohm)
= reaktansi bocor stator (Ohm)
Sebagaimana halnya pada transformator, arus stator terdiri dari dua komponen.
Komponen pertama adalah komponen beban yang akan menghasilkan fluks yang
akan melawan fluks yang dihasilkan oleh arus rotor. Komponen lainnya yaitu , arus
ini terbagi lagi menjadi dua komponen yaitu komponen rugi-rugi inti yang sefasa
dengan dan komponen magnetisasi yang menghasilkan fluks magnetik pada inti
dan celah udara yang tertinggal dari . Sehingga dapat dibuat rangkaian ekivalen
pada stator, seperti gambar 2.11 berikut ini.
R1 jX1
Gambar 14. Rangkaian Ekivalen Stator per-Fasa Motor Induksi
Rangkaian Ekivalen Rotor
Pada saat rotor dalam kondisi diam yaitu kondisi sesaat rotor sebelum bergerak atau pada saat rotor terkunci (locked-rotor), slip s = 1 dimana kecepatan rotor nr = 0,
karena seluruh belitan rotor dihubung-singkat, maka akan mengalir arus akibat ggl
induksi pada rotor. Sehingga dapat dituliskan persamaannya sebagai berikut :
……… (2.13) dan rangkaian ekivalen rotor perfasa dalam keadaan diam (s = 1) digambarkan
seperti gambar 2.12. di bawah ini.
Gambar 15. Rangkaian Ekivalen per-Fasa Rotor Motor Induksi Keadaan Diam dimana,
= arus rotor dalam keadaan diam (Ampere)
= ggl induksi rotor dalam keadaan diam (Volt)
= resistansi rotor (Ohm)
= reaktansi rotor dalam keadaan diam (Ohm)
Ketika rotor berputar, maka ggl rotor perfasa dan reaktansi rotor perfasa
masing-masingnya dipengaruhi oleh frekuensi (untuk dapat melihat persamaan
(2.7), sementara reaktansi rotor dapat dijelaskan dari persamaan di bawah ini dimana
nilainya tergantung dari induktansi dan frekuensi rotor.
=ωrL2=2πf2L2 ………. (2.14)
dengan f2 = sf,
maka = 2πsfL2
= s(2πfL2)
= sX2………(2.15)
Dengan demikian dan X2 nilainya bergantung terhadap slip s, sementara resistansi
rotor perfasa tidak dipengaruhi oleh frekuensi sehingga tidak tergantung terhadap 2
I
2
R
2
E jX2
nilai slip s. Sehingga dari persamaan (2.13) di atas dapat dibuat persamaannya
menjadi :
……… (2.16)
Dengan membagi pembilang dan penyebut pada persamaan (2.16) di atas dengan s,
maka
……… (2.17)
Perhatikan bahwa magnitud dan fasa dari pada persamaan (2.16) dan
(2.17) adalah sama. Namun demikian, terdapat sebuah perbedaan signifikan diantara
dua persamaan ini. Pada persamaan (2.16) ggl berada pada frekuensislip, ketika
dibagi dengan memberikan arus frekuensi-slip. Tetapi pada persamaan
(2.17), berada pada frekuensi-saluran ketika dibagi dengan +
memberikan arus frekuensi-saluran.
Nilai dari sekarang lebih besar dari R2 dikarenakan s memiliki nilai dalam bentuk
pecahan. Untuk itu, dapat dipecah menjadi sebuah bagian yang bernilai konstan R2
dan sebuah bagian yang variabel ( ), yaitu
……… (2.18)
Bagian pertama R2 merupakan tahanan rotor/fasa dan mewakilkan rugi tembaga (Cu
loss). Bagian kedua 1
−1 merupakan sebuah beban tahanan-
s
variabel. Daya yang dikirim ke beban ini mewakilkan daya mekanik keseluruhan
yang dibangun di rotor. Untuk itu beban mekanik pada motor dapat digantikan
dengan sebuah beban tahanan-variabel dengan nilai R2 1−1 . Ini diketahui
s
sebagai tahanan beban RL.
Dengan demikian persamaan (2.17) dapat dirubah menjadi :
……… (2.19)
Dari persamaan (2.16), (2.17) dan (2.19) di atas, maka dapat digambarkan rangkaian
ekivalen rotor seperti gambar 2.13. di bawah ini.
R2 jX
2
Gambar 15. Rangkaian Ekivalen Rotor per-Fasa
Keadaan Berputar pada Slip = s dimana (i)menyatakan persamaan 2.16, (ii)
menyatakan persamaan 2.17,(iii) menyatakan persamaan 2.19
Rangkaian Ekivalen Lengkap
Dari penjelasan mengenai rangkaian ekivalen pada stator dan rotor di atas, maka
dapat dibuat rangkaian ekivalen perfasa motor induksi dengan model transformator,
dengan rasio perbandingan ‘a’ antara stator dan rotor. Perhatikan gambar 2.14.
R1 jX1 a = N1/N2 jX 2
Gambar 16. Rangkaian Ekivalen Per-Fasa Motor Induksi Model Transformator
Untuk menghasilkan rangkaian ekivalen per-fasa akhir dari motor induksi, penting
untuk menyatakan bagian rotor dari model rangkaian ekivalen gambar 2.14 di atas
terhadap sisi stator. Pada transformator yang umum, tegangan, arus, dan impedansi
pada sisi sekunder, dapat dinyatakan terhadap sisi primer dengan menggunakan
rasio perbandingan belitan dari transformator tersebut. Dengan mengasumsikan
jenis rotor yang digunakan adalah jenis rotor belitan dan terhubung bintang ( Y ),
yang mana motor dengan rotor jenis ini sangat mirip dengan transformator, maka
kita dapat juga menyatakan sisi rotor terhadap sisi stator seperti halnya pada
transformator.
Jika rasio perbandingan efektif dari sebuah motor induksi adalah a (= N1/N2),
maka pentransformasian tegangan rotor terhadap sisi stator menjadi:
……… (2.21) dan untuk impedansi rotor :
……… (2.22a)
dengan penguraian lebih lanjut :
= a2 R2 ………. (2.22b) = a2 X2………. (2.22c)
Dari persamaan (2.18), (2.19), dan (2.22) di atas, maka dapat kita gambarkan
rangkaian ekivalen per-fasa motor induksi sebagai kelanjutan dari gambar 2.14,
dimana disini bagian rangkaian rotor telah dinyatakan terhadap bagian stator.
dimana adanya R2 1−1 menyatakan resistansi variabel sebagai analog listrik
s
dari beban mekanik variabel.
Gambar 17. Rangkaian Ekivalen per-Fasa Motor Induksi dengan Bagian
Rangkaian Rotor Dinyatakan Terhadap Sisi Stator
(a)dengan tahanan variabel R2' s
(b)dengan tahanan variabel R2' (1s −1) sebagai bentuk analog listrik dari
beban mekanik
Pada transformator, analisis rangkaian ekivalen dilakukan dengan
mengabaikan cabang pararel yang terdiri dari Rcdan Xm atau dengan memindahkan
cabang pararel ke terminal primer. Bagaimanapun, penyederhanaan ini tidak
diperbolehkan pada rangkaian ekivalen motor induksi. Ini disebabkan kenyataan
bahwa arus penguatan pada transformator bervariasi dari 2% sampai 6% dari arus
beban penuh dan per unit reaktansi bocor primer kecil. Tetapi pada motor induksi,
arus penguatan bervariasi dari 30% sampai 50% dari arus beban penuh dan per unit
reaktansi bocor stator adalah lebih tinggi. Dengan demikian kesalahan yang besar
akan terjadi dalam penentuan daya dan torsi, dalam hal cabang pararel diabaikan,
atau dihubungkan pada terminal stator.
Dibawah kondisi kerja normal pada tegangan dan frekuensi konstan, rugi
inti pada motor induksi biasanya juga konstan. Dalam pandangan pada kenyataan
ini, tahanan rugi inti Rc yang mewakili rugi inti motor, dapat dihilangkan dari
rangkaian ekivalen motor induksi pada gambar 2.15(b). Akan tetapi, untuk
menentukan daya poros atau torsi poros, rugi inti yang konstan harus diikutsertakan
dalam pertimbangan, bersama dengan gesekan, rugi-rugi beban buta (stray-load
losses) dan angin. Dengan penyederhanaan ini, maka dapat digambarkan rangkaian
Gambar 18. Rangkaian Ekivalen per-Fasa Motor Induksi dengan
Mengabaikan Rugi Inti
Kesimpulan
Pada era industri modern saat ini, kebutuhan terhadap alat produksi yang tepat
guna sangat diperlukan dapat meningkatkan efisiensi waktu dan biaya. Sebagian besar
alat industri dan rumah tangga menggunakan tenaga listrik sebagai energi penggerak
utamanya. Sebuah motor AC induksi satu fasa bergantung pada komponen listrik
tambahan untuk menghasilkan ini berputar medan magnetik. Dua set elektromagnet
dibentuk dalam setiap motor. Antara stator dan rotor, terdapat celah udara, melalui yang
karena induksi, energi tersebut dipindahkan dari stator ke rotor.
Daftar Pustaka
1. Mitra Hebat Teknik, Motor Listrik Satu Fasa,
http://maintenace.wordpress.com/2009/10/25/motor-listrik-ac-satu-fasa.
2. Dunia Listrik, Motor ListrikAC Satu Fasa, http://dunialistrik.blogspot.com/2009/04/motor-listrik-ac-satu-fasa.html
3.
%20Electric%20motors%20(Bahasa%20Indonesia).pdf
4. http://insyaansori.blogspot.com/2013/04/motor-listrik-3-fasa.html
5. http://kk.mercubuana.ac.id/elearning/files_modul/13045-12-482468644196.pdf