6
BAB II
GENERATOR SINKRON 3 FASA
2.1 Umum
7 2.2 Konstruksi Generator Sinkron
Konstruksi generator sinkron sama dengan motor sinkron yaitu mesin sinkron pada dasarnya generator sinkron mengkonversi energi mekanik menjadi energi listrik bolak-balik . Secara umum, konstruksi generator sinkron terdiri dari stator (bagian yang diam) dan rotor (bagian yang bergerak). Keduanya merupakan rangkaian magnetik yang berbentuk simetris dan silindris yang berkaitan. Selain itu generator sinkron memiliki celah udara ruang antara stator dan rotor yang berfungsi sebagai tempat berputarnya rotor dan tempat terjadinya fluksi atau induksi energi listrik dari rotor ke stator.
Pada Gambar 2.1 dapat dilihat konstruksi dari sebuah generator sinkron secara umum :
Gambar 2.1 Konstruksi generator sinkron secara umum
A. Rotor
8 terdapat kutub-kutub magnet dengan lilitannya yang dialiri arus searah, melewati cincin geser dan sikat. Generator sinkron memiliki dua tipe rotor, yaitu :
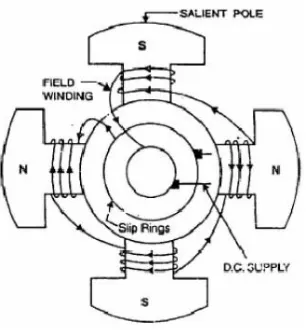
1.) Rotor yang berbentuk kutub sepatu (salient pole)
2.) Rotor yang berbentuk kutub dengan celah udara sama rata (cylindrical)
1. Rotor kutub menonjol (Salient Pole Rotor)
Rotor tipe ini mempunyai kutub yang jumlahnya banyak. Kumparan dibelitkan pada tangkai kutub, dimana kutub-kutub diberi laminasi untuk mengurangi panas yang ditimbulkan oleh rugi-rugi arus Eddy, kumparan-kumparan medannya terdiri dari bilah tembaga persegi. Kutub menonjol ditandai dengan rotor berdiameter besar dan panjang serta sumbunya pendek.
Selain itu jenis kutub salient pole, kutub magnetnya menonjol keluar dari permukaan rotor. Belitan-belitan medan dihubung seri. Ketika belitan medan ini disuplai oleh eksiter, maka kutub yang berdekatan akan membentuk kutub yang berlawanan. Bentuk kutub menonjol generator sinkron tampak seperti Gambar 2.2 berikut :
9 Rotor kutub menonjol umumnya digunakan pada generator sinkron dengan kecepatan putaran rendah dan sedang. Generator sinkron tipe seperti ini biasanya dikopel oleh mesin diesel atau turbin air pada sistem pembangkit listrik. Rotor kutub menonjol baik digunakan untuk putaran rendah dan sedang karena :
a. Konstruksi kutub menonjol tidak terlalu kuat untuk menahan tekanan mekanis apabila diputar dengan kecepatan tinggi.
b. Kutub menonjol akan mengalami rugi-rugi yang besar dan bersuara bising jika diputar dengan kecepatan tinggi.
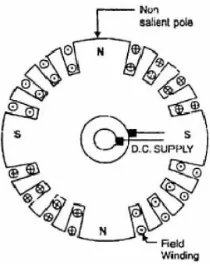
2. Rotor kutub tak menonjol dengan celah udara sama rata (Rotor Silinder)
Rotor tipe ini dibuat dari plat baja berbentuk silinder yang mempunyai sejumlah slot sebagai tempat kumparan. Karena adanya slot-slot dan juga kumparan medan yang terletak pada rotor maka jumlah kutub pun sedikit yang dapat dibuat. Belitan-belitan medan dipasang pada alur-alur di sisi luarnya dan terhubung seri yang dienerjais oleh eksiter. Gambar bentuk kutub silinder generator sinkron tampak seperti pada Gambar 2.3 berikut:
10 Dimana rotor terdiri dari beberapa komponen utama yaitu :
a. Slip Ring
Slip ring merupakan cincin logam yang melingkari poros rotor tetapi dipisahkan oleh isolasi tertentu. Dibuat dari bahan kuningan atau tembaga yang dipasang pada poros dengan memakai bahan isolasi. Terminal kumparan rotor dipasangkan ke-slip ring ini kemudian dihubungkan kesumber arus searah melalui sikat (brush) yang letaknya menempel pada slip ring.
b. Sikat
Sebagaian dari generator sinkron ada yang memiliki sikat ada juga yang tidak memiliki sikat. Sikat pada generator sinkron berfungsi sebagai saklar putar untuk mengalirkan arus DC ke-kumparan medan pada rotor generator sikron. Sikat terbuat dari bahan karbon tertentu.
c. Kumpara rotor (kumparan medan)
Kumparan medan merupakan unsure yang memegang peranan utama dalam menghasilkan medan magnet. Kumparan ini mendapat arus searah dari sumber eksitasi tertentu.
d. Poros Rotor
11 B. Stator
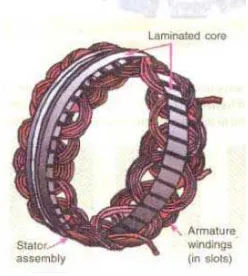
Stator adalah bagian generator yang diam dan berfungsi sebagai tempat untuk menerima induksi magnet dari rotor. Arus bolak-balik (AC) yang menuju ke beban disalurkan melalui armatur, komponen ini berbentuk sebuah rangka silinder dengan lilitan kawat konduktor yang sangat banyak. Armatur selalu diam (tidak bergerak). Oleh karena itu, komponen ini juga disebut dengan stator. Lilitan armatur generator dalam wye dan titik netral dihubungkan ke tanah. Lilitan dalam wye dipilih karena:
1. Meningkatkan daya output.
2. Menghindari dan meminimalisir tegangan harmonik, sehingga tegangan line tetap sinusoidal dalam kondisi beban apapun.
Stator dari mesin sinkron terbuat dari bahan ferromagnetik yang berbentuk dan di laminasi untuk mengurangi rugi-rugi arus pusar. Dengan inti ferromagnetik yang bagus berarti permeabilitas dan resistivitas dari bahan tinggi. Pada Gambar 2.4 berikut memperlihatkan alur stator tempat kumparan jangkar
12 Stator terdiri dari beberapa komponen utama, yaitu:
a. Rangka stator
Rangka stator merupakan rumah (kerangka) yang menyangga inti jangkar generator.
b. Inti Stator
Inti stator terbuat dari laminasi-laminasi baja campuran atau besi magnetic khusus terpasang ke rangka stator.
c. Alur (slot) dan Gigi
Alur dan gigi merupakan tempat meletakkan kumparan stator. Ada 3 (tiga) bentuk alur stator yaitu terbuka, setengah terbuka, dan tertutup seperti pada gambar 2.5 berikut :
Gambar 2.5 Bentuk-bentuk alur
d. Kumparan Stator (Kumparan Jangkar)
13 2.3 Prinsip Kerja Generator Sinkron
Adapun prinsip kerja dari suatu generator sinkron adalah:
1. Kumparan medan yang terdapat pada rotor dihubungkan dengan sumber eksitasi tertentu yang akan mensuplai arus searah terhadap kumparan medan. Dengan adanya arus searah yang mengalir melalui kumparan medan maka akan menimbulkan fluksi yang besarnya terhadap waktu adalah tetap.
2. Unit penggerak mula (Prime Mover) yang sudah terkopel dengan rotor segera dioperasikan sehingga memutar rotor pada kecepatan nominalnya persamaan (2.1) dimana :
𝑛𝑛
=
120𝑓𝑓𝑝𝑝 …………(2.1) n = Kecepatan putar rotor (rpm) p = Jumlah kutub rotor
f = frekuensi (Hz)
3. Perputaran rotor tersebut sekaligus akan memutar medan magnet yang dihasilkan oleh kumparan medan. Medan putar yang dihasilkan pada rotor, akan diinduksikan pada kumparan jangkar sehingga pada kumparan jangkar yang terletak di stator akan dihasilkan fluks magnetik yang
berubah-ubah besarnya terhadap waktu. Adanya perberubah-ubahan fluks magnetik yang
melingkupi suatu kumparan akan menimbulkan ggl induksi pada
ujung-ujung kumparan tersebut, hal tersebut sesuai dengan persamaan berikut
dimana : 𝑒𝑒= −𝑁𝑁𝑑𝑑∅
𝑑𝑑𝑑𝑑 ………. (2.2)
𝑒𝑒 =−𝑁𝑁𝑑𝑑∅𝑚𝑚𝑚𝑚𝑚𝑚𝑚𝑚 sin𝜔𝜔𝑑𝑑
14 𝑒𝑒 =−𝑁𝑁𝜔𝜔∅𝑚𝑚𝑚𝑚𝑚𝑚𝑚𝑚 𝑐𝑐𝑐𝑐𝑚𝑚𝜔𝜔𝑑𝑑 ….. (2.4)
𝜔𝜔 = 2𝜋𝜋𝑓𝑓 ……… (2.5)
𝑒𝑒=−𝑁𝑁(2𝜋𝜋𝑓𝑓)Ø𝑚𝑚𝑚𝑚𝑚𝑚𝑚𝑚 cos𝜔𝜔𝑑𝑑 …. (2.6)
𝑓𝑓 = 𝑛𝑛𝑝𝑝
120 ……….. (2.7)
𝑒𝑒=−𝑁𝑁 �2𝜋𝜋120𝑛𝑛𝑝𝑝�Ø𝑚𝑚𝑚𝑚𝑚𝑚𝑚𝑚 cos𝜔𝜔𝑑𝑑 ……… (2.8)
𝐸𝐸𝑚𝑚𝑚𝑚𝑚𝑚𝑚𝑚 = 𝑁𝑁 �2.3,14.120𝑛𝑛𝑝𝑝�Ø𝑚𝑚𝑚𝑚𝑚𝑚𝑚𝑚 … (2.9)
….. (2.10)
…….. (2.11)
…………. …(2.12)
𝐸𝐸𝑒𝑒𝑓𝑓𝑓𝑓 =𝐶𝐶𝑛𝑛Ø ………(2.13)
Dimana:
E = ggl induksi (Volt) N = Jumlah belitan C = Konstanta p = Jumlah kutub n = Putaran (rpm) f = Frequensi (Hz)
15 Untuk generator sinkron tiga phasa, digunakan tiga kumparan jangkar yang ditempatkan di stator yang disusun dalam bentuk tertentu, sehingga susunan kumparan jangkar yang sedemikian akan membangkitkan tegangan induksi pada ketiga kumparan jangkar yang besarnya sama tapi berbeda fasa 1200 satu sama lain. Setelah itu ketiga terminal kumparan jangkar siap dioperasikan untuk menghasilkan energi listrik [2].
2.4 Reaksi Jangkar
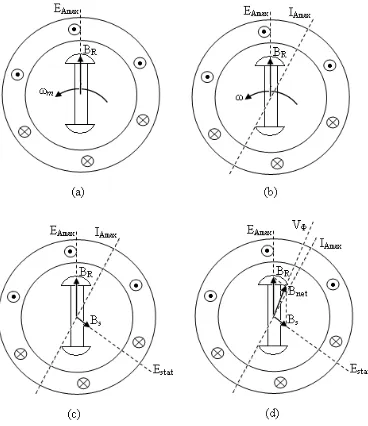
Bila generator sinkron (alternator) melayani beban yang terhubung ke terminal generator maka pada belitan stator akan mengalir arus, sehigga timbul medan magnet pada belitan stator yang akan berinteraksi dengan medan rotor. Medan magnet ini akan mendistorsi medan magnet yang dihasilkan belitan rotor sehingga menghasilkan fluks resultan. Seperti yang dijelaskan pada Gambar 2.6 :
16 Pada Gambar 2.6.a. Medan magnet yang berputar akan menghasilkan tegangan induksi E
a. Bila generator melayani beban dengan induktif, maka arus pada stator akan tertinggal seperti pada Gambar 2.6.b. Arus stator tadi akan meghasilkan medan magnet sendiri B
s dan tegangan stator Estat, seperti pada Gambar 2.6.c. Vektor penjumlahan antara BS dan BR akan menjadi Bnet dan penjumlahan Estat dan Ea, akan menghasilkan Ø, V pada terminal jangkar.
Saat beban terhubung ke beban induktif, arus jangkar akan tertinggal terhadap tegangan jangkar. Arus pada belitan stator akan menghasilkan medan magnet B
s, yang kemudian kan menghasilkan tegangan stator Estat. Dua tegangan yaitu tegangan jangkar E
a dan tegangan reaksi jangkar Estat akan menghasilkan Vt , dimana ditunjukkan pada persamaan (2.14)
V
t = Ea + Estat ...(2.14) Tegangan Reaksi Jangkar E
stat = - j X Ia
Sehingga persaman 2.14 dapat ditulis kembali pada persamaan (2.15). V
t = Ea-jXIa ...(2.15)
Selain pengaruh reaksi jangkar ini, pengurangan tegangan induksi generator sinkron juga karena adanya tahanan R
a dan Induktansi belitan stator Xa, ,dan penjumlahan X dan Xa sering disebut Reaktansi Sinkron Xs, sehingga persamaan (2.15) dapat ditulis kembali sebagai persamaan (2.16).
V
17
Berdasarkan cara penyaluran arus searah pada rotor generator sinkron, sistem eksitasi terdiri dari dua sistem yaitu sistem eksitasi dengan menggunakan sikat (brushless excitation) dan sistem eksitasi tanpa menggunakan sikat (brushless).
Ada dua jenis sistem eksitasi dengan menggunakan sikat yaitu : 1. Sistem eksitasi konvensional (menggunakan generator arus searah). 2. Sistem eksitasi statis.
Sedangkan sistem eksitasi tanpa menggunakan sikat terdiri dari : 1. Sistem eksitasi dengan menggunakan baterai.
2. Sistem eksitasi dengan menggunakan Permanen Magnet Generator (PMG).
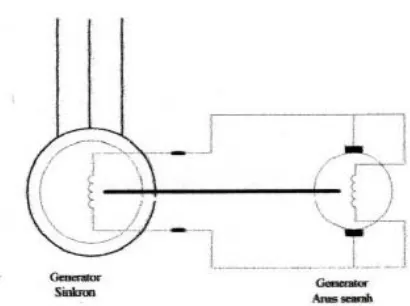
Berikut sistem eksitasi menggunakan sikat:
18 Untuk sistem eksitasi yang konvensional, arus searah diperoleh dari sebuah generator arus searah berkapasitas kecil yang disebut eksiter. Generator sinkron dan generator arus serah tersebut terkopel dalam satu poros, sehingga putaran generator arus searah sama dengan putaran generator sinkron.
Tegangan yang dihasilkan oleh generator arus searah ini diberikan kebelitan rotor generator sinkron melalui sikat karbon dan slip ring. Akibatnya arus searah mengalir ke dalam rotor atau kumparan medan dan menimbulkan medan magnet yang diperlukan untuk dapat menghasilkan tegangan arus bolak-balik pada kumparan utama yang terletak di stator generator sinkron.
19 Gambar 2.7 Sistem Eksitasi Menggunakan Generator Arus Searah
2 Sistem Eksitasi Statis
Sistem eksitasi statis menggunakan peralatan eksitasi yang tidak bergerak (static), artinya peralatan eksitasi tidak ikut berputar bersama dengan rotor generator sinkron. Sistem eksitasi statis (static excitation sistem) atau disebut juga dengan self excitation merupakan sistem eksitasi yang tidak memerlukan generator tambahan sebagai sumber eksitasi generator sinkron. Sumber eksitasi pada sistem eksitasi statis berasal dari tegangan output generator itu sendiri yang disearahkan terlebih dahulu dengan menggunakan penyearah thyristor.
20 Dibandingkan dengan generator yang konvensional generator dengan sistem eksitasi statis memang sudah jauh lebih baik yaitu tidak ada generator arus searah (yang keandalannya rendah) dan beban generator arus searah pada penggerak mula hilang. Eksiter diganti dengan eksiter yang tidak berputar yaitu penyearah karena itu disebut eksiter statis. Gambar 2.8 berikut adalah sistem eksitasi statis.
Gambar 2.8 Sistem eksitasi statis
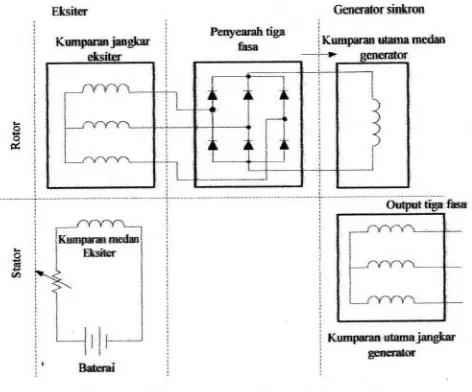
21 Sedangkan sistem eksitasi tanpa menggunakan sikat :
1. Sistem Eksitasi Menggunakan Baterai
Sistem eksitasi tanpa sikat diaplikasikan pada generator sinkron, dimana suplai arus searah kebelitan medan dilakukan tanpa melalui sikat. Arus searah untuk suplai eksitasi untuk awal start generator digunakan suplai dari baterai, yang sering dinamakan penguat mula, dimana arus ini selanjutnya disalurkan ke belitan medan AC exiter. Tegangan keluaran dari generator sinkron ini disearahkan oleh penyearah yang menggunakan dioda, yang disebut rotating rectifier, yang diletakkan pada bagian poros ataupun pada bagian dalam dari rotor generator sinkron, sehingga rotating rectifier tersebut ikut berputar sesuai dengan putaran rotor, seperti pada gambar 2.9 berikut:
Gambar 2.9 Sistem Eksitasi Dengan Menggunakan Baterai
22 disalurkan kebagian belitan medan dari generator utama. Hal ini dimungkinkan karena dioda penyearah ditempatkan pada bagian poros yang dimiliki bersama-sama oleh rotor generator utama dan penguat medannya. Arus medan pada generator utama dikontrol oleh arus yang mengalir pada kumparan medan penguat (eksiter).
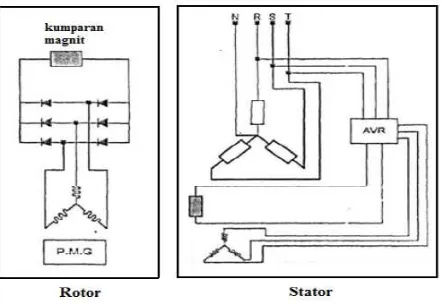
2. Sistem Eksitasi Menggunakan Pemanen Magnet Generator
Suatu generator sinkron harus memiliki sebuah medan magnet yang berputar agar generator tersebut menghasilkan tegangan pada statornya. Medan magnet ini dapat dihasilkan dari belitan rotor yang disuplai dengan sumber listrik arus searah. Cara lain untuk menghasilkan medan magnet pada rotor adalah dengan menggunakan magnet permanen sebagai sumber eksitasinya ini disebut dengan Permanen Magnet Generator (PMG).
23 Gambar 2.10 Sistem Eksitasi Dengan Menggunakan Permanen Magnet Generator
Dari Gambar 2.17, bahwa pada bagian mesin yang berputar (rotor) terdapat magnet permanen, kumparan jangkar generator eksitasi, kumparan medan generator utama. Hal ini memungkinkan generator tersebut tidak menggunakan slip ring dan sikat dalam pengoperasiannya sehingga lebih efektif dan efisiensi [9].
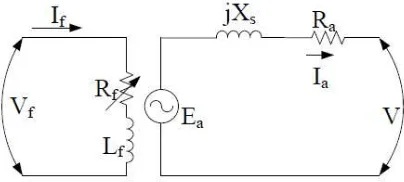
2.6 Rangkaian Ekivalen
Stator terdiri dari belitan-belitan. Suatu belitan konduktor akan terdiri dari
tahanan R
a dan induktansi XIamaka rangkaian ekivalen suatu generator sinkron dapat
dibuat seperti Gambar 2.11
24 Dengan melihat Gambar 2.11 maka tegangan generator sinkron dapat ditulis pada persamaan (2.18).
E
a = V + jXarIa + jXLaIa + Ra Ia………...(2.18) Dan persamaan terminal generator sinkron dapat ditulis pada persamaan (2.19) Vt = Ea – jXarIa – jXLaIa – Ra Ia ...(2.19)
Dengan menyatakan reaktansi reaksi jangkar dan reaktansi fluks bocor sebagai reaktansi sinkron, atau X
s = Xar + XLa, maka menjadi persamaan (2.20). Vt = Ea – jXsIa – RaIa [Volt]…..…...(2.20) Dimana:
Vt = Tegangan Terminal Ia = Arus Jangkar Ea = Tegangan Induksi Ra = Tahanan Jangkar Xs = Reaktansi Sinkron Xar = Reaktansi Jangkar XLa = Reaktansi Fluks Bocor
Gambar 2.12 Penyederhanaan rangkaian ekivalen generator sinkron
25 tegangan induksi perfasa dengan tegangan terminal generator akan ditunjukkan pada Gambar 2.13 berikut:
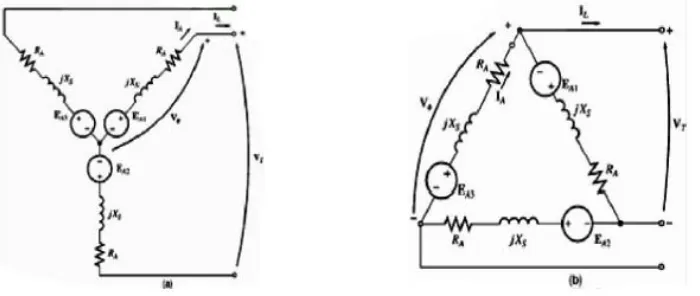
Gambar 2.13 Rangkaian ekivalen generator sinkron 3 fasa Sementara itu, rangkaian ekivalen generator sinkron tiga fasa untuk tiap jenis hubungan ditunjukkan oleh Gambar 2.14 berikut ini:
Gambar 2.14 Rangkaian ekivalen belitan stator generator sinkron 3 fasa (a). Belitan-Y, (b). Belitan-∆
26 2.7 Rangkaian Belitan
2.7.1 Belitan Stator
Ada dua jenis belitan stator yang banyak digunakan untuk generator sinkron 3 phasa, yaitu:
1. Belitan satu lapis (Single Layer Winding). 2. Belitan berlapis ganda (Double Layer Winding).
1. Belitan satu lapis (Single Layer Winding).
Gambar 2.15 Belitan satu lapis (Single Layer Winding).
27 2. Belitan berlapis ganda (Double Layer Winding).
Kumparan jangkar yang diperlihatkan pada Gambar 2.15 hanya mempunyai satu lilitan per kutub per phasa, akibatnya masing – masing kumparan hanya dua lilitan secara seri. Bila alur-alur tidak terlalu lebar, masing-masing penghantar yang berada dalam alur akan membangkitkan tegangan yang sama. Masing – masing tegangan phasa akan sama untuk menghasilkan tegangan per penghantar dan jumlah total dari penghantar per phasa.
Dalam kenyataannya cara seperti ini tidak menghasilkan cara yang efektif dalam penggunaan inti stator, karena variasi kerapatan fluks dalam inti dan juga melokalisir pengaruh panas dalam daerah alur dan menimbulkan harmonik. Untuk mengatasi masalah ini, generator praktisnya mempunyai kumparan terdistribusi dalam beberapa alur per kutub per phasa. Gambar 2.16 memperlihatkan bagian dari sebuah kumparan jangkar yang secara umum banyak digunakan [5].
28 2.7.2 Belitan Rotor
Rotor berfungsi untuk membangkitkan medan magnet yang kemudian tegangan dihasilkan dan akan diinduksikan ke stator. Generator sinkron memiliki dua tipe rotor, yaitu :
1).Rotor berbentuk kutub sepatu (salient pole)
2).Rotor berbentuk kutub dengan celah udara sama rata (cylindrical)
Perbedaan utama antara keduanya adalah salient pole rotor digerakkan oleh turbin hidrolik kecepatan rendah sedangkan cylindrical rotor digerakkan oleh turbin uap berkecepatan tinggi. Bentuk rotor yang terdapat pada generator sinkron dapat dilihat pada Gambar 2.17 berikut
(a) Rotor Kutub Menonjol (b) Rotor Silinder
Gambar 2.17 Bentuk Rotor
2.8 Karakteristik Generator Sinkron 3 Fasa 2.8.1 Karakteristik Beban Nol
29 a.) Generator diputar pada kecepatan nominal (n)
b.) Tidak ada beban yang terhubung pada terminal
c.) Arus medan (If) dinaikkan dari nol hingga maksimum secara bertahap d.) Catat harga tegangan terminal (Vt) pada setiap harga arus medan (If) yang terlihat pada gambar 2.18 di bawah ini:
Gambar 2.18 Rangkaian Test Tanpa Beban
Dari Gambar dapat diperoleh persamaan umum generator pada persamaan (2.21). E
0 = Vt + Ia (Ra + jXs)...(2.21) Pada hubungan generator terbuka (beban nol), I
a = 0. Maka persamaannya menjadi persamaan (2.22).
E0 = Vt = CnØ …...…..(2.22)
Karena tidak ada beban yang terpasang, maka Ø yang dihasilkan hanya Øf. Sehingga menjadi persamaan (2.23)
E0 = CnØf ...(2.23) Dari persamaan (2.23) menjadi persamaan (2.24) E0 = CnIf... (2.24)
30 Dimana:
E0 = Tegangan pada saat beban nol Ia = Arus Jangkar
C = Konstanta n = Jumlah Putaran
If = Arus Medan Ra = Tahanan Jangkar
Xs = Reaktansi Sinkron
Pengujian beban nol terkait dengan karakteristik beban nol yaitu hubungan antara tegangan induksi Ea dengan arus penguat /eksitasi If . pada pengujian beban nol, rotor generator diputar pada kecepatan nominal dan terminal jangkar dalam keadaan terbuka. Arus medan If diatur bertahap nol hingga diperoleh harga tegangan induksi Ea. bersekitar kurang lebih 125% dari tegangan nominal generator. Pada kondisi ini arus jangkar Ia = 0 dan tegangan induksi Ea = Vt. sehingga pembacaan tegangan induksi jangkar dengan pengaruh variasi medan eksitasi digambarkan karakteristik hubung terbuka dari generator atau OCC (Open-Circuit Characteristic). Yang terlihat pada gambar 2.19 dibawah:
Gambar 2.19 Karakteristik Hubung Terbuka (OCC)
31 bentuk kurva mulai terlihat saturasi. Inti besi yang tidak jenuh dalam bingkai mesin sinkron memiliki reluktansi beberapa ratus kali lebih rendah daripada reluktansi air gap. Sehingga pertama-tama hampir seluruh MMF melewati celah udara dan peningkatan fluksi yang terjadi linear. Ketika inti besi mengalami saturasi, reluktansi besi meningkat secara drastis dan fluksi meningkat lebih lambat dengan peningkatan nilai MMF. Bentuk linear dari grafik OCC disebut karakteristik air gap line [5].
2.8.2 Karakteristik Hubung Singkat
Untuk menentukan karakteristik dan parameter generator sinkron yang dihubung singkat terdapat beberapa langkah yang harus dilakukan antara lain :
a.) Generator diputar pada kecepatan nominal b.) Atur arus medan (I
f) pada nol c.) Hubung singkat terminal d.) Ukur arus armatur (I
a) pada setiap peningkatan arus medan (If)
Dimana, rangkaian test hubung singkat pada generator sinkron akan diperlihatkan pada Gambar 2.20 berikut.
32 Dari Gambar, persamaan umum generator sinkron dihubung singkat adalah persamaan (2.26)
Ea = Vt + Ia (Ra + jXs)... (2.26) Pada saat generator sinkron dihubung singkat, V
t = 0 dan Ia = Isc . Maka persamaan menjadi persamaan (2.27)
Ea = Isc (Ra + jXs) ... (2.27)
Ea = CnØ maka persamaan nya menjadi persamaan (2.28). CnØ = I
sc (Ra + jXs)... (2.28) Karena Cn dan (R
a + jXs ) bernilai konstan, maka persamaan nya menjadi persamaan (2.29)
Cn = k
1... (2.29) sehingga menjadi persamaan (2.30)
(R
a + jXs) = k2... (2.30) Sehingga menjadi persamaan (2.31)
k
1.If = Isc. k2... (2.32) sehingga menjadi persamaan (2.33)
𝐼𝐼𝑚𝑚𝑐𝑐 =𝐾𝐾𝐾𝐾1
2𝐼𝐼𝑓𝑓
... (2.34)
33 Pada karakteristik generator hubung singkat bentuk kurva adalah linear. Hal ini disebabkan oleh medan magnet yang terjadi sangat kecil sehingga inti besi tidak mengalami saturasi. Gambar 2.21 berikut ini akan memperlihatkan karakteristik hubung singkat pada generator sinkron [5].
Gambar 2.21 Karakteristik Hubung Singkat
Ketika generator dihubung singkat, arus armatur pada persamaan (2.35) 𝐼𝐼𝑚𝑚 =𝐼𝐼𝑚𝑚𝑐𝑐 =𝑅𝑅 𝐸𝐸𝑚𝑚
𝑚𝑚+𝑗𝑗𝑋𝑋𝑚𝑚 ... (2.35)
Harga Mutlaknya adalah pada persamaan (2.36) 𝐼𝐼𝑚𝑚 = 𝐸𝐸𝑚𝑚
�𝑅𝑅𝑚𝑚2+𝐽𝐽𝑋𝑋𝑚𝑚2
...(2.36)
Dimana:
Isc =Arus Hubung Singkat Ia = Arus Jangkar
C = Konstanta n = Jumlah Putaran
If = Arus Medan Ra = Tahanan Jangkar
Xs = Reaktansi Sinkron Ea = Tegangan Induksi
34 2.8.3 Karakteristik Berbeban
Beberapa langkah untuk menentukan parameter generator sinkron berbeban antara lain sebagai berikut :
a.) Generator diputar pada kecepatan nominal (n) b.) Beban (Z
L) terpasang pada terminal generator sinkron c.) Arus medan (I
f) dinaikkan dari nol hingga maksimum secara bertahap d.) Catat tegangan terminal (V
t) pada setiap peningkatan arus medan (If) yang terlihat pada gambar 2.22 berikut:
Gambar 2.22 Rangkaian Generator Sinkron Berbeban
Dari Gambar 2.22 diperoleh persamaan umum generator sinkron berbeban pada persamaan (2.37)
E
a = Vt + Ia (Ra + jXs)... (2.37) Sehingga menjadi persamaan (2.38)
V
t = Ea - Ia (Ra + jXs) ... (2.38) Dimana :
35 Dalam keadaan berbeban arus jangkar akan mengalir dan mengakibatkan terjadinya reaksi jangkar. Reaksi jangkar bersifat reaktif karna itu dinyatakan sebagai reaktansi, dan disebut reaktansi magnetisasi (Xm). reaktansi ini bersama-sama dengan reaktansi fluks bocor (Xa) yang dikenal dengan reaktansi sinkron (Xs). Pada generator berbeban, Ia = IL bernilai konstan karena beban (ZL) tetap.terlihat pada gambar 2.23 di bawah ini:
Gambar 2.23 Karakteristik Generator Sinkron Berbeban
Watak berbeban suatu generator sinkron merupakan penggambaran dari hubungan antara tegangan terminal (Vt) dan arus medan (Ia) dimana beban generator tetap, dan jumlah putaran tetap [5].
2.9 Pengaturan Tegangan Terminal
36 Dimana tegangan terminal dituntut untuk bekerja stabil dalam sistem. Seperti pada gambar 2.24 Seiring perubahan beban maka akan mengalir arus beban (Ia) yg berubah-ubah sesuai dengan perubahan beban. Yang berpengaruh pada tahanan (Ra) dan reaktansi sinkron (Xs) atau yang disebut dengan impedansi sinkron (Zs). arus beban akan merubah harga tegangan induksi jangkar (Ea) sesuai dengan persamaan (2.20) yaitu V
t = Ea - Ia (Ra + jXs). oleh sebab itu untuk menjaga tegangan terminal agar tetap stabil seiring dengan perubahan arus beban yaitu dengan mengatur tegangan induksinya (Ea). dimana tegangan induksi seperti persamaan (2.13) dimana Ea=CnØ pada beban nol. Sehingga untuk mengatur tegangan induksi dilakukan dengan mengatur jumlah putaran (n) dan fluksi magnetik (Ø).
Pengaturan jumlah putaran mengakibatkan Penggerak mula (Prime Mover). karena kecepatan putaran rotor diputar dengan menggunakan energi mekanis yang berasal dari penggerak mula. Penggerak mula dioperasikan dengan menggunakan energi primer (Ep) dan energi sekunder (Es) yang berhubungan dengan bahan bakar.
37 2.10 Rugi-Rugi Generator Sinkron
Rugi-rugi yangterdapat pada generator sinkron dibagi menjadi beberapa bagian diantaranya :
1. Rugi-rugi tembaga rotor dan stator (copper losses) 2. Rugi-rugi inti (core losses)
3. Rugi-rugi mekanik (mechanical losses) 4. Rugi-rugi nyasar (stray losses)
Rugi-rugi angin dan gesekan dipengaruhi oleh ukuran dan bentuk dari bagian yang berputar, rancangan sudu kipas rotor, desain bantalan (bearing) dan susunan rumah (housing) mesin. Rugi yang hilang tersebut berupa daya yang diperlukan untuk memutarkan kipas guna mensirkulasi udara pendingin dan gesekan bantalan dan sikat.
Rugi-rugi inti dan besi (P
i ) disebabkan oleh fluksi utama mesin dan terjadi terutama pada gigi-gigi stator (jangkar), pada bagian inti jangkar dekat gigi-gigi stator dan pada permukaan kutub rotor. Inti stator umumnya dibentuk dari laminasi tipis baja silikon yang terisolasi satu sama lain untuk membatasi rugi-rugi histeresis dan arus eddy pada baja.
Rugi-rugi mekanik dan inti sering digabung bersama yang disebut dengan rugi-rugi beban nol pada mesin. Pada keadaan beban nol, daya input mesin digunakan untuk mengatasi rugi-rugi ini. Oleh karena itu pengukuran daya input stator.
Rugi-rugi tembaga rotor (P
RCL = If 2
.R
f) dihitung dari arus medan dan
rugi-38 rugi penguat. Rugi-rugi tembaga kumparan jangkar (P
SCL = 3IA 2
.R
A) pada
umumnya dihitung dari tahanan arus searah kumparan jangkar pada suhu 750
Gambar 2.25 Diagram Aliran daya Generator sinkron
Dari gambar 2.25 dapat dilihat bahwa persamaan (2.39) di bawah ini: 𝑃𝑃𝑐𝑐𝑃𝑃𝑑𝑑 =√3𝑥𝑥𝑉𝑉𝑑𝑑𝑥𝑥𝐼𝐼𝑙𝑙𝑥𝑥𝑐𝑐𝑐𝑐𝑚𝑚𝑥𝑥…….. (2.39)
Maka semakin baik faktor daya yang dihasilkan maka daya out put juga semakin
besar, dengan kata lain rugi – rugi yang dihasilkan menjadi lebih kecil. Maka dari
Persamaan 2.39 dapat disimpulkan semakin baik faktor daya, maka efisiensi yang
dihasilkan juga semakin baik [1].
2.11 Pengaruh Faktor Daya Terhadap Regulasi dan Efisiensi
39 𝑉𝑉𝑅𝑅= 𝐸𝐸𝑓𝑓−𝑉𝑉𝑑𝑑
𝑉𝑉𝑑𝑑 𝑥𝑥100%...(2.40) Dimana:
E
f = Tegangan terminal generator pada saat beban nol
Vt = Tegangan terminal generator pada saat beban penuh [volt]
Seperti halnya dengan mesin-mesin listrik lainnya, maupun transformator, maka efisiensi generator sinkron dapat dituliskan sebagai persamaan (2.41).
𝜂𝜂 = 𝑃𝑃𝑐𝑐𝑃𝑃𝑑𝑑
Dalam sistem listrik AC/Arus Bolak-Balik ada tiga jenis daya yang dikenal, khususnya untuk beban yang memiliki impedansi (Z), yaitu:
• Daya semu (S), VA (Volt Amper)
• Daya aktif (P), Watt
• Daya reaktif (Q), VAR (Volt Amper Reaktif)
40
Sedangkan daya semu dinyatakan dengan satuan Volt-Ampere (disingkat,
VA), menyatakan kapasitas peralatan listrik, seperti yang tertera pada peralatan
generator dan transformator. Pada suatu instalasi, khususnya di pabrik/industri juga
terdapat beban tertentu seperti motor listrik, yang memerlukan bentuk lain dari daya,
yaitu daya reaktif (VAR) untuk membuat medan magnet atau dengan kata lain daya
reaktif adalah daya yang terpakai sebagai energi pembangkitan flux magnetik
sehingga timbul magnetisasi dan daya ini dikembalikan ke sistem karena efek induksi
elektromagnetik itu sendiri, sehingga daya ini sebenarnya merupakan beban
(kebutuhan) pada suatu sistim tenaga listrik.
Gambar 2.26 Segitiga Daya
Faktor daya atau faktor kerja adalah perbandingan antara daya aktif (watt)
dengan daya semu/daya total (VA), atau cosinus sudut antara daya aktif dan daya
semu/daya total (lihat Gambar 2.26). Daya reaktif yang tinggi akan meningkatkan
sudut ini dan sebagai hasilnya faktor daya akan menjadi lebih rendah. Faktor daya
41 Besarnya daya reaktif yang diperlukan untuk mengubah faktor daya dari
cos φ1 menjadi cos φ2 dapat ditentukan dengan persamaan (2.42)
ΔQ = PTan (φ1 – φ
2) VAR ... (2.42)
Gambar 2.27 Perbaikan Faktor Daya
Kemudian besar nilai kapasitornya dapat dihitung dengan persamaan (2.43) ∆𝐶𝐶𝑝𝑝𝑒𝑒𝑝𝑝𝑓𝑓𝑚𝑚𝑚𝑚𝑚𝑚 =3𝑉𝑉∆𝑄𝑄22𝜋𝜋𝑓𝑓 =𝜇𝜇𝜇𝜇 ………. (2.43)
Dimana :
φ1 : adalah faktor daya sebelum diperbaiki
φ2 : adalah faktor daya sesudah diperbaiki
ΔCperfasa : Besar nilai kapasitor perfasa
ΔQ : Jumlah daya reaktif yang dibutuhkan untuk memperbaiki faktor daya (VAR)
42 satu, dan faktor daya terdahulu, dimana Vt' adalah tegangan terminal setelah beban dengan faktor daya yang sama ditambahkan, dan Vt menyatakan tegangan terminal pada saat awal.
(a)
(b)
(c)
43 Terlihat bahwa untuk beban induktif, pertambahan beban akan mengurangi tegangan terminal akan mengecil. Begitu juga jika beban resistif ditambahkan maka tegangan terminal juga akan mengecil. Jika beban kapasitif ditambahkan, maka tegangan terminal cenderung membesar [8].
2.13 Regulasi Tegangan
Jika pada sebuah generator dilakukan pengukuran tegangan dalam keadaan
tanpa beban dan berbeban, ternyata terdapat perbedaan dari hasil pengukuran
tersebut. Dimana terlihat bahwa dengan berubahnya beban maka tegangan terminal
dari generator juga akan berubah. Perubahan besarnya (magnitude) tegangan tidak
hanya tergantung dari besarnya beban, tetapi juga dipengaruhi cos φ beban.
Pengaturan tegangan (voltage regulation) dari suatu generator sinkron dapat didefinisikan sebagai perubahan tegangan terminal dari beban nol (no-load) ke beban penuh (full-load) dengan menjaga eksitasi medan dan putaran tetap, dibagi dengan tegangan beban penuh (full-load). Dimana tegangan pada terminal dari generator sinkron tergantung dari beban yang terpasang dan juga faktor daya (power factor) beban tersebut. Pengaturan tegangan ini dinyatakan dalam persen (%) dari tegangan nominal dan perbedaan tegangan bukan secara vektor, tetapi besaran yang dinyatakan dalam persamaan (2.44)
𝑉𝑉𝑅𝑅=𝐸𝐸𝑓𝑓−𝑉𝑉𝑑𝑑
𝑉𝑉𝑑𝑑 𝑥𝑥100% ………(2.44)
diketahui:
VR = Regulasi Tegangan Vt = Tegangan Terminal
44
Perlu dicatat bahwa E
0 - VFL adalah selisih aritmatik bukan selisih fasor.
Faktor – faktor yang mempengaruhi regulasi tegangan sebuah generator sinkron
antara lain :
a.) Jatuh tegangan akibat I
aRapada belitan jangkar b.) Jatuh tegangan akibat I
aXL
c.) Perubahan tegangan akibat reaksi jangkar
Gambar 2.29 menunjukkan pengaruh perubahan beban terhadap perubahan tegangan terminal dengan faktor daya (power factor) yang berbeda.
Gambar 2.29 Pengaruh Perubahan beban terhadap tegangan terminal
Dari Gambar 2.29 dapat dilihat bahwa perubahan tegangan terminal karena
reaksi jangkar bergantung pada arus beban (I
L) dan faktor daya (PF) dari beban.
Untuk beban dengan faktor daya mendahului (leading), tegangan terminal tanpa
beban lebih kecil daripada tegangan terminal beban penuh. Oleh karena itu, regulasi
tegangan bernilai negatif. Untuk beban dengan faktor daya tertinggal (lagging),
45
Maka, regulasi tegangan bernilai positif. Sedangkan untuk beban dengan faktor daya
1 (unity), nilai tegangan terminal tanpa beban hampir sama dengan nilai tegangan
terminal beban penuh. Oleh karena itu, regulasi tegangan bernilai mendekati 0 persen
[5].
2.14 Penentuan Parameter Generator Sinkron 3 Fasa Dari test :
- Ea dari test beban nol (Open Circuit) - Ia dari test hubung singkat (Short Circuit)
Diperoleh Reaktansi Xd (d-axis) sehinga di dapat persamaan
𝑋𝑋𝑑𝑑 = 𝑚𝑚𝑝𝑝𝑃𝑃𝑚𝑚𝑑𝑑𝑒𝑒𝑡𝑡𝑚𝑚𝑛𝑛𝑡𝑡𝑚𝑚𝑛𝑛ℎ𝑃𝑃𝑏𝑏𝑃𝑃𝑛𝑛𝑡𝑡𝑏𝑏𝑒𝑒𝑏𝑏𝑚𝑚𝑛𝑛𝑚𝑚𝑖𝑖𝑛𝑛𝑡𝑡𝑚𝑚𝑚𝑚𝑑𝑑𝑛𝑛𝑐𝑐𝑙𝑙𝑃𝑃𝑛𝑛𝑑𝑑𝑃𝑃𝑚𝑚𝑃𝑃𝑛𝑛𝑑𝑑𝑃𝑃𝑚𝑚𝑚𝑚𝑝𝑝𝑃𝑃𝑚𝑚𝑚𝑚𝑝𝑝𝑃𝑃𝑚𝑚𝑚𝑚𝑒𝑒𝑑𝑑𝑚𝑚𝑛𝑛𝑚𝑚𝑒𝑒𝑑𝑑𝑚𝑚𝑛𝑛𝑦𝑦𝑚𝑚𝑛𝑛𝑡𝑡𝑑𝑑𝑒𝑒𝑝𝑝𝑑𝑑𝑒𝑒𝑛𝑛𝑑𝑑𝑃𝑃𝑚𝑚𝑚𝑚𝑚𝑚𝑚𝑚
Dari test :
- tegangan dan arus dari Test Slip
Diperoleh Reaktansi Xq (q-axis) sehinga di dapat persamaan 𝑋𝑋𝑑𝑑 =𝑑𝑑𝑒𝑒𝑡𝑡𝑚𝑚𝑛𝑛𝑡𝑡𝑚𝑚𝑛𝑛𝑑𝑑𝑒𝑒𝑝𝑝𝑚𝑚𝑖𝑖𝑛𝑛𝑚𝑚𝑙𝑙𝑚𝑚𝑚𝑚𝑚𝑚𝑚𝑚𝑖𝑖𝑚𝑚𝑃𝑃𝑚𝑚𝑝𝑝𝑒𝑒𝑝𝑝𝑓𝑓𝑚𝑚𝑚𝑚𝑚𝑚
Dari Test Berbeban :
46 2.15 Metode Penentuan Tegangan Terminal Generator Sinkron
2.15.1 Metode Blondel (Two Reaction Theory)
Dalam pengaturan tegangan dengan metode EMF, Reaksi jangkar dihitung dengan cara diekivalensikan terhadap tegangan reaktansi jangkar, dalam bentuk ini adalah pengembangan dari konsep reaktansi sinkron. Ini memungkinkan hanya digunakan pada mesin non salient pole. Dimana celah udaranya dianggap uniform dan reluktansi rangkaian magnetik adalah benar-benar konstan.
Dalam mesin salient pole, mmf jangkar tidak dapat ditentukan hanya dengan mengandalkan reaktansi ekivalennya, karena celah udaranya tidak uniform dan reluktansi sepanjang kutub d-axis lebih kecil dari q-axis [3].
47 Gambar 2.30 Diagram fasor teori dua reaksi dari mesin sinkron salient pole komponen mmf jangkar Fad dan Faq dapat diambil sebagai komponen yang dihasilkan oleh arus jangkar I yang sefasa denga Fad dan Faq, misalnya masing-masing Id dan Iq.
Dimana : Id = I sin θ ... (2.45) Iq= I cos θ... (2.46)
Θ = sudut fasa internal
ingat bahwa banyaknya d-axis adalah satu, sehingga efek magnetiknya sepanjang sumbu kutub medan. Dalam hal ini, Fad dan Id berada pada d-axis. Banyaknya sumbu q-axis juga adalah satu dimana Faq dan Iq berada pada q-axis tersebut.
Pada metode EMF, mmf jangkar ditempatkan oleh q-axis yang lagging terhadap tegangan induksi. Dengan demikian, komponen mmf jangkar dapat diuraikan menjadi Ead dan Eaq dengan lagging 90o, terhadap masing-masing Fad dan Faq (Id dan Iq).
Dari gambar 2.30 diatas , Ead adalah tegangan induksi dari kumparan jangkar ke d-axis dari reaksi jangkar Fad, sehingga dapat ditulis:
48 Disini Xad dan Xaq adalah sebanding dengan konstanta dan dapat didesain sebagai reaktansi jangkar pada masing-masing d-axis dan q-axis.
Drop tegangan reaktansi Xat pada kumparan dapat ditulis: -j.I.Xat = -j ( Id + Iq ).Xat = -j. Id. Xat . j . Iq . Xat ... (2.49)
Disini drop tersebut boleh dikombinasikan dengan ekivalen reaksi jangkar emd untuk menentukan reaktansi sinkron d dan q-axis.
Dengan demikian, Xd = Xat + Xad = reaktansi sinkrin pada d-axis ... (2.50) Xq = Xat + Xaq = reaktansi sinkrin pada q-axis ... (2.51) Reaktansi leakage jangkar Xat sudah dianggap sama pada d-axis dan q-axis.
a. diagram fasor dua reaksi generator sinkron b. Versi yang disederhanakan Gambar 2.31 Diagram fasor dua reaksi generator sinkron disederhanakan Jadi yang perlu diingat dan dicatat perbedaan metode emf dengan metode dua reaksi, metode emf memperkenalkan konsep reaktansi sinkron (Xs) yang dihitung untuk seluruh reaktansi jangkar, sedangkan metode dua reaksi memperkenalkan konsep dua reaksi, satu diasosiasikan dengan d-axis komponen dari mmf jangkar, dan satu lagi dengan q-axis komponen mmf jangkar.
49 Ef = Vt + Ia.R + j . Id . Xd + j . Iq . Xq ... (2.52)
Dalam menggunakan diagram fasor gambar 2.30 arus jangkar I, harus diselesaikan dalam komponen d-axis dan q-axis. Prosedur ini seperti yang telah dianalisa dalam mengambil persamaan dimana diproleh harga Ef. Dengan demikian, pengaturan tegangan untuk generator sinkron salient pole dapat dicari [3].
Pengukuran reaktansi sinkron pada d-axis (Xd), dapat ditentukan dari test beban nol dan test hubung singkat. Dimana persamaannya adalah :
𝑋𝑋𝑑𝑑 = 𝑚𝑚𝑝𝑝𝑃𝑃𝑚𝑚𝑑𝑑𝑒𝑒𝑡𝑡𝑚𝑚𝑛𝑛𝑡𝑡𝑚𝑚𝑛𝑛ℎ𝑃𝑃𝑏𝑏𝑃𝑃𝑛𝑛𝑡𝑡𝑏𝑏𝑒𝑒𝑏𝑏𝑚𝑚𝑛𝑛𝑚𝑚𝑖𝑖𝑛𝑛𝑡𝑡𝑚𝑚𝑚𝑚𝑑𝑑𝑛𝑛𝑐𝑐𝑙𝑙𝑃𝑃𝑛𝑛𝑑𝑑𝑃𝑃𝑚𝑚𝑃𝑃𝑛𝑛𝑑𝑑𝑃𝑃𝑚𝑚𝑚𝑚𝑝𝑝𝑃𝑃𝑚𝑚𝑚𝑚𝑝𝑝𝑃𝑃𝑚𝑚𝑚𝑚𝑒𝑒𝑑𝑑𝑚𝑚𝑛𝑛𝑚𝑚𝑒𝑒𝑑𝑑𝑚𝑚𝑛𝑛𝑦𝑦𝑚𝑚𝑛𝑛𝑡𝑡𝑑𝑑𝑒𝑒𝑝𝑝𝑑𝑑𝑒𝑒𝑛𝑛𝑑𝑑𝑃𝑃𝑚𝑚𝑚𝑚𝑚𝑚𝑚𝑚 ……. (2.53)
2. Menghitung Xq
Sedangkan untuk mengukur reaktansi sinkron pada q-axis (Xq) dapat ditentukan dengan beberapa cara, yakni:
• Dengan metode test slip
• Test arus lagging maksimum
a. Dengan metode test slip
50 Kumparan medannya, tetap dibiarkan dalam keadaan terbuka, kemudian kumparan jangkar dihubungkan ke sumber tegangan yang direduksi 20% bsampai 40% dari harga ratingnya, dan rate frekuensinya dipengaruhi melalui terminal jangkar. Pada kondisi ini kecepatan relatif konstan antara kutub medan dengan mmf jangkar, adalah sama dengan perbedaan antara kecepatan sinkronnya dengan kecepatan rotornya. Sehingga dikenal juga dengan test slip. Pada suatu keadaan dimana bentuk gelombang mmf jangkar segaris dengan sumbu kutub medan. Maka reluktansi yang diberikan oleh mmf jangkar adalah minimum, dan pada keadaan ini tegangan terminal jangkar sefasa dibagi oleh arus yang dihasilkannya, akan memberikan harga Xd.
Gambar 2.32 Osilograph Test Slip
51 𝑋𝑋𝑞𝑞 =𝑑𝑑𝑒𝑒𝑡𝑡𝑚𝑚𝑛𝑛𝑡𝑡𝑚𝑚𝑛𝑛𝑚𝑚𝑝𝑝𝑃𝑃𝑚𝑚 𝑗𝑗𝑚𝑚𝑛𝑛𝑡𝑡𝑚𝑚𝑚𝑚𝑝𝑝𝑑𝑑𝑒𝑒𝑝𝑝𝑚𝑚𝑖𝑖𝑛𝑛𝑚𝑚𝑙𝑙𝑚𝑚𝑚𝑚𝑚𝑚𝑚𝑚𝑖𝑖𝑚𝑚𝑃𝑃𝑚𝑚𝑚𝑚𝑖𝑖𝑛𝑛𝑖𝑖𝑚𝑚𝑃𝑃𝑚𝑚𝑝𝑝𝑒𝑒𝑝𝑝𝑓𝑓𝑚𝑚𝑚𝑚𝑚𝑚𝑝𝑝𝑒𝑒𝑝𝑝𝑓𝑓𝑚𝑚𝑚𝑚𝑚𝑚 (𝑚𝑚𝑚𝑚𝑝𝑝𝑒𝑒𝑝𝑝 (𝑣𝑣𝑐𝑐𝑙𝑙𝑑𝑑)) ……….(2.55)
Karena tegangan terminal jangkar yang digunakan adalah kecil (tidak menghasilkan harga saturasi), maka harga reaktansi yang ditentukanpun harga yang belum mencapai saturasi.
Dalam test ini harga slip dibuat sekecil mungkin sehingga harga yang diperoleh kurang sesuai, karena harga reaktansi yang diperoleh tergantung dari kejenuhan inti dan slip. Dengan demikian test ini hanya cocok digunakan untuk menentukan perbandingan antara Xd dan Xq. Jadi harga Xd yang digunakan adalah dari test beban nol dan hubung singkat [3].
Maka Xq dapat dicari dengan :
Misalkan : Xd’ = reaktansi d-axis dari test slip Xq’ = reaktansi q-axis dari test slip
Xd = reaktansi d-axis dari test beban nol dan hubung singkat Maka: 𝑋𝑋𝑑𝑑
b. Test Arus Lagging Maksimum
52 jangkar maksimum dan stabil). dan reaktansi sinkronnya, diberikan oleh persamaan :
𝑋𝑋𝑞𝑞 =𝑉𝑉𝑑𝑑 (𝑑𝑑𝑒𝑒𝑡𝑡𝑚𝑚𝑛𝑛𝑡𝑡𝑚𝑚𝑛𝑛𝑚𝑚𝑝𝑝𝑃𝑃𝑚𝑚 𝑗𝑗𝑚𝑚𝑛𝑛𝑡𝑡𝑚𝑚𝑚𝑚𝑝𝑝𝑑𝑑𝑒𝑒𝑝𝑝𝑚𝑚𝑖𝑖𝑛𝑛𝑚𝑚𝑙𝑙𝑝𝑝𝑒𝑒𝑝𝑝𝑓𝑓𝑚𝑚𝑚𝑚𝑚𝑚𝑝𝑝𝑒𝑒𝑝𝑝𝑓𝑓𝑚𝑚𝑚𝑚𝑚𝑚 (𝐼𝐼) ) …….(2.58)