10
3. METODOLOGI PENELITIAN
3.1. Waktu dan Lokasi Penelitian
Penelitian ini dilaksanakan pada bulan Oktober 2011 hingga April 2012, berupa pembuatan alat dan uji coba alat. Pembuatan dan pengujian alat
dilakukan di laboratorium Workshop Akustik dan Instrumentasi Kelautan, Fakultas Perikanan dan Ilmu Kelautan, Institut Pertanian Bogor.
3.2. Alat dan Bahan
Pembuatan Low Altitude Observation Camera (LAOC) dapat dilihat pada tabel 2 meliputi alat yang digunakan untuk pembuatan alat.
Tabel 2. Daftar alat yang digunakan dalam pembuatan LAOC
No Nama Fungsi
1 Netbook dengan sistem operasi windows XP
Untuk melihat perekaman dari video dan GPS 2 Bor listrik dan standing
bor
Melubangi pipa dan akrilik
3 Gergaji Besi Memotong plat besi, akrilik dan pipa
4 Obeng Melepaskan dan memasang sekrup dan baut 5 Gerinda Mengasah sisi pada akrilik dan memotong
sekrup
6 Solder Listrik Memanasi timah untuk menghubungkan kaki-kaki pada rangkaian elektronika
7 DMM (Digital
Multimeter)
Pengecekan tegangan yang dikeluarkan oleh alat serta tegangan dari aki
8 Mesin jigsaw Memotong dan membua pola pada akrilik 9 Tang Alat untuk mencengkram atau memegang
komponen yang akan dilepas
10 Kikir Menghaluskan bagian alat
11 Project Board Tempat untuk membuat rangkaian elektronika dari alat
12 Alat tulis Menggambar rangkaian maupun menggambar pola pada akrilik dan pipa
13 Tali Long line Sebagai lintasan untuk pergerakan alat 14 Pemanas Akrilik Membentuk siku pada akrilik
11
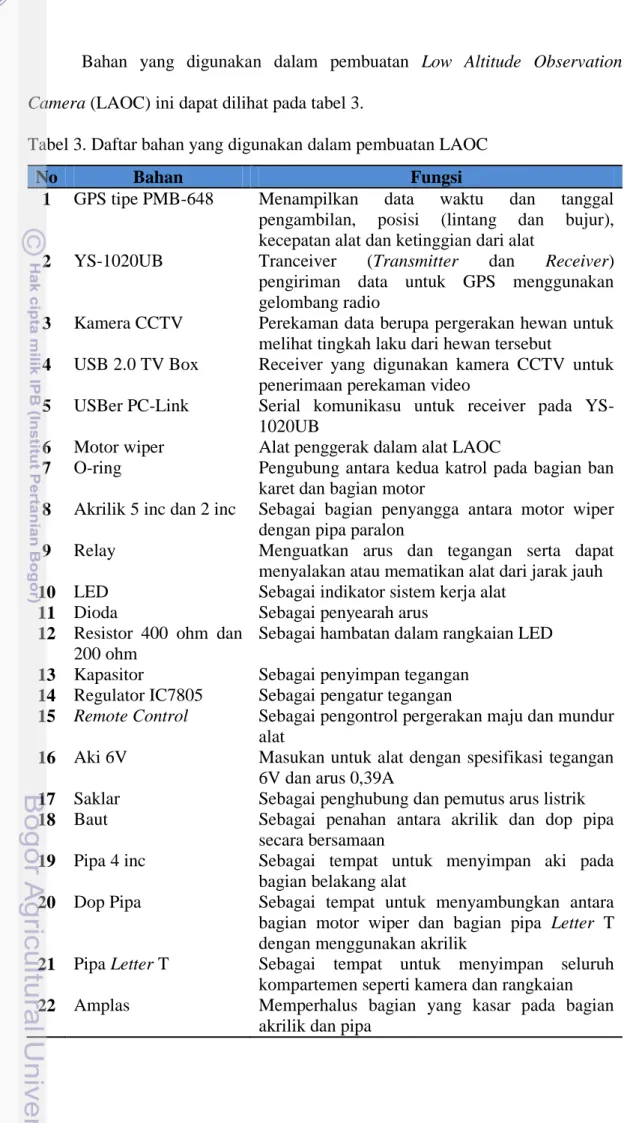
Bahan yang digunakan dalam pembuatan Low Altitude Observation
Camera (LAOC) ini dapat dilihat pada tabel 3.
Tabel 3. Daftar bahan yang digunakan dalam pembuatan LAOC
No Bahan Fungsi
1 GPS tipe PMB-648 Menampilkan data waktu dan tanggal pengambilan, posisi (lintang dan bujur), kecepatan alat dan ketinggian dari alat
2 YS-1020UB Tranceiver (Transmitter dan Receiver)
pengiriman data untuk GPS menggunakan gelombang radio
3 Kamera CCTV Perekaman data berupa pergerakan hewan untuk melihat tingkah laku dari hewan tersebut
4 USB 2.0 TV Box Receiver yang digunakan kamera CCTV untuk penerimaan perekaman video
5 USBer PC-Link Serial komunikasu untuk receiver pada YS-1020UB
6 Motor wiper Alat penggerak dalam alat LAOC
7 O-ring Pengubung antara kedua katrol pada bagian ban karet dan bagian motor
8 Akrilik 5 inc dan 2 inc Sebagai bagian penyangga antara motor wiper dengan pipa paralon
9 Relay Menguatkan arus dan tegangan serta dapat menyalakan atau mematikan alat dari jarak jauh 10 LED Sebagai indikator sistem kerja alat
11 Dioda Sebagai penyearah arus
12 Resistor 400 ohm dan 200 ohm
Sebagai hambatan dalam rangkaian LED 13 Kapasitor Sebagai penyimpan tegangan
14 Regulator IC7805 Sebagai pengatur tegangan
15 Remote Control Sebagai pengontrol pergerakan maju dan mundur alat
16 Aki 6V Masukan untuk alat dengan spesifikasi tegangan 6V dan arus 0,39A
17 Saklar Sebagai penghubung dan pemutus arus listrik 18 Baut Sebagai penahan antara akrilik dan dop pipa
secara bersamaan
19 Pipa 4 inc Sebagai tempat untuk menyimpan aki pada bagian belakang alat
20 Dop Pipa Sebagai tempat untuk menyambungkan antara bagian motor wiper dan bagian pipa Letter T dengan menggunakan akrilik
21 Pipa Letter T Sebagai tempat untuk menyimpan seluruh kompartemen seperti kamera dan rangkaian 22 Amplas Memperhalus bagian yang kasar pada bagian
12
23 Lem power glue, lem korea dan lem silikon
Untuk merekatkan bagian pada akrilik dan ban karet serta membuat kedap air sehingga air tidak dapat masuk dan merusak rangkaian
24 Ban Karet Sebagai roda untuk lintasan dimana lintasan akan dijepit di kedua ban karet
25 Per Menjepit dua buah ban karet pada bagian atas dan bawah
26 Besi Sebagai sambungan antara ban karet bagian kanan dengan ban karet pada bagian kiei
27 Katrol Sebagai modifikasi untuk motor wiper dan ban karet sehingga dapat tersambung dengan O-ring 28 Spacer Sebagai penyangga dari tali agar tali tetap berada
pada jalur alat
29 Kabel ciut Melindungi kabel dan menyatukan kabel agar kabel terlindungi dari air
30 Kabel USB Kabel untuk menyambungkan dari alat USBer PC-link dengan laptop atau PC
Program yang digunakan dalam pembuatan Low Altitude Observation
Camera (LAOC) ini dapat dilihat pada tabel 4.
Tabel 4. Daftar program yang digunakan dalam pembuatan LAOC
No Program Fungsi
1 Google Sketch UP 7 Membuat sketsa alat secara 3D maupun 2D 2 Eagle 5.2.0 Membuat rangkaian dari alat LAOC
3 Terminal.exe Tampilan untuk keluaran GPS tipe PMB-648 4 USB2 TV Box Tampilan untuk perekaman video secara real time
maupun direkam
3.3. Proses Pembuatan Low Altitude Observation Camera (LAOC)
Proses pembuatan Low Altitude Observation Camera (LAOC) ini dibagi menjadi beberapa tahapan yaitu tahapan pembuatan cassing, tahapan penyatuan seluruh komponen dan tahapan pengujian alat. Tahapan pembuatan cassing ini diantaranya penentuan cassing yang digunakan seperti akrilik dan pipa, sedangkan tahapan penyatuan dari seluruh komponen dilihat dari fungsi dan sistem kerja komponen. Seluruh tahapan ini saling berhubungan satu sama lain (Gambar 4).
13
Gambar 3. Tahapan pembuatan LAOC
3.4 Rancangan Alat
Rancangan alat didesain dengan menggunakan program Google Sketch Up 7. Bagian-bagian dari alat LAOC (Gambar 4) seperti kamera CCTV,
transmitter kamera, transmitter GPS, Remote control (RC), motor wiper, aki 6
Volt yang dirangkai secara seri sehingga menjadi 12 Volt, pipa 4 inc, pipa Letter T, katrol, O-ring dan akrilik.
MULAI
Persiapan
Perumusan
Uji Coba
SelesaiBerhasil
Tidak Berhasil
Perancangan
Pembuatan sistem
mekanik
Pembuatan sistem
Elektronik
Penggunaan
Software
Menggabungkan
Rancangan
14
15
Rancang bangun ini memiliki dimensi panjang 540 mm dengan lebar 295 mm dan tinggi 160 mm, pada rangkaian alat LAOC ini menggunakan kamera CCTV yang dipergunakan untuk merekam video pergerakan hewan dan dikirim pada USB2 TV Box sehingga tampilan akan muncul pada layar PC atau laptop, selain kamera alat ini memiliki sistem GPS yang dipasang pada badan alat, GPS ini akan mengirimkan posisi lintang, bujur, waktu, tanggal, kecepatan dan ketinggian dari alat tersebut, alat ini juga memiliki sistem terkontrol untuk pergerakan maju-mundur dengan menggunakan remote control yang dirangkai dengan menggunakan relay, pada rangkaian digunakan juga saklar sehingga alat dengan mudah dihidupkan dan dimatikan.
Rangkaian alat ini menggunakan 4 buah aki dengan spesifikasi tegangan 6 Volt dengan arus 0,39 A, aki ini dirangkai secara seri, sebab motor wiper dan kamera CCTV menggunakan tegangan 12 Volt untuk dapat berfungsi, sedangkan GPS memerlukan tegangan 5 Volt untuk berfungsi. Penggunaan aki ini dibagi menjadi 2 yaitu: 12 Volt untuk Motor wiper, dan 12 Volt untuk kamera CCTV dan GPS.
3.5 Perancangan Mekanik, Elektronik dan Pembuatan Software 3.5.1 Perancangan Mekanik
Perancangan mekanik ini meliputi pemilihan alat dan bahan yang akan digunakan dalam pembuatan LAOC, pembuatan mekanik yang dilakukan yaitu pipa 4 inc sepanjang 10 cm disambungkan dengan pipa leter T, pipa 4 inc ini digunakan untuk meletakan aki sedangkan pipa leter T digunakan sebagai tempat untuk kamera CCTV dan seluruh rangkaian dari alat. Motor wiper akan diletakan
16
pada bagian depan dari pipa leter T yang akan disambungkan dengan akrilik, akrilik ini berfungsi sebagai penghubung antara pipa dengan motor wiper. Motor wiper ditempatkan secara terpisah yaitu di bagian depan alat, ini dimaksudkan untuk menyeimbangkan alat antara bagian depan dan belakang, selain itu penggunaan motor wiper di depan untuk mempermudah jalan dari alat sehingga bagian belakang hanya untuk penyangga alat.
Motor wiper yang digunakan telah dimodifikasi dengan penambahan katrol pada bagian depan motor sedangkan pada bagian atas terdapat katrol yang telah dihubungkan dengan ban karet, ban karet ini berfungsi untuk menjalankan alat. Terdapat 4 buah ban karet yang digunakan dalam penelitian ini, Sisi kanan alat terdapat dua buah dan pada sisi kiri terdapat 2 buah, ban karet pada setiap sisi akan diletakan berhadapan atas dan bawahini berfungsi untuk menjepit lintasan, ban karet disisi kanan dan kiri bagian akrilik tersambung dengan besi yang dapat mempermudah pergerakan ban karet, pada bagian kiri ban karet telah
dihubungkan dengan katrol, fungsi katrol ini agar dapat mempermudah
menghubungkan dengan katrol yang terdapat pada wiper. Katrol pada ban dan katrol pada wiper disambungkan O-ring karet sehingga ketika katrol pada wiper berputar maka pada katrol bagian ban karet akan bergerak dan alat akan jalan sesuai dengan yang diperintahkan oleh remote control.
Pipa Letter T yang digunakan dalam penelitian ini bertujuan untuk
memasang seluruh kompartemen yang ada seperti transmitter kamera, transmitter GPS, rangkaian remote control dan kamera CCTV. Kamera CCTV menghadap kebawah sehingga pengamatan dilakukan secara horizontal, pada bagian pipa
17
pertama yaitu saklar pada bagian kanan dari alat ini digunakan untuk memutuskan dan menghubungkan arus dari motor wipper sedangkan saklar kedua pada bagian kiri untuk memutuskan dan menghubungkan arus pada GPS dan kamera CCTV.
Pipa 4 inc pada bagian belakang alat diletakan 4 buah aki, 2 buah aki dirangkai secara seri untuk penggunaan motor wipper dan 2 buah aki untuk GPS dan kamera CCTV. Bagian atas dari pipa terdapat 2 buah katrol yang
dihubungkan oleh akrilik 5 inc, ini digunakan untuk pergerakan alat dan penyangga alat, agar alat tetap seimbang antara bagian depan dan belakang.
Tali Long line merupakan bahan sebagai lintasan dari alat, Tali ini akan dijepitkan pada ban karet dibagian depan alat, ban ini telah terhubung dengan motor wipper. Tali long line ini dimasukan pada katrol bagian belakang sehingga alat akan tetap stabil dan berjalan dengan baik pada lintasan. Katrol pada bagian belakang hanya sebagai penyangga sedangkan ban karet pada bagian depan merupakan sistem penggerak dari alat LAOC.
Rangkaian remote control yang digunakan diambil dari bagian rangkaian pada mobil RC dimana rangkaian ini akan dirangkai bersama relay, saklar dan LED. Pergerakan dari alat hanya sebatas maju dan mundur karena digunakan pada dua buah lintasan. Saklar yang digunakan yaitu saklar tekan berjenis PTM (Push to Make), dimana saklar ini akan mengalirkan arus dari aki ketika saklar ditekan dan akan memutuskan aki ketika saklar tidak ditekan. LED yang
digunakan yaitu LED berwarna hijau dimana LED ini berfungsi sebagai indikator bahwa alat berfungsi dengan baik. LED ini akan ditambahakan resistor 400 ohm dan 200 ohm dimana fungsi resistor ini sebagai penghambat arus.
18
Gambar 5. Desain alat (a) Tampak samping dan (b) Tampak bawah
(a)
19
Pada desain alat dilihat dari tampak atas (Gambar 5a) terlihat 3 buah antena yaitu antena transmitter kamera, anttena transmitter GPS, dan antenna
remote control. Bagian depan alat terlihat 2 buah ban karet, 1 buah katrol dan
bagian depan motor wipper, sedangkan pada bagian belakang terdapat dua buah katrol. Selain itu, terdapat dua buah saklar untuk menghidupkan dan mematikan alat, 2 buah ban karet yang diletakan atas dan bawah serta katrol pada bagian motor wipper. Alat tampak bawah (Gambar 5b) terlihat kamera CCTV yang menghadap kearah bawah sehingga perekamannya secara horizontal.
3.5.2 Perancangan Elektronika
3.5.2.1 Elektronika GPS dan YS1020UB
Elektronika yang digunakan pada pembuatan alat LAOC ini yaitu GPS tipe PMB-648, YS-1020UB dan USBer Serial, penggunaan YS-1020UB ini yaitu untuk pengiriman data GPS melalui gelombang radio yang digunakan oleh YS-1020UB, sedangkan untuk USBer Serial digunakan untuk penerimaan data GPS dengan YS-1020UB yang akan langsung dikirim dan ditampilkan ke layar PC atau laptop. Spesifikasi dari GPS tipe PMB-648, YS-1020UB dan USBer to Serial dapat dilihat pada Lampiran 2, 3 dan 4.
Kaki pada YS-1020UB dan GPS PMB-648 dihubungkan ke masing-masing kaki. Ground dan Vcc pada YS-1020UB dihubungkan juga dengan kapasitor dan regulator, regulator yang digunakan yaitu jenis IC8705, dua digit terakhir pada IC8705 mengindikasikan tegangan teregulasi yang dihasilkan yaitu menghasilkan 5 Volt (Bishop, 2004) (Gambar 6).
20
21
22
YS-1020UB yang terhubung dengan USBer dirangkai bersama kapasitor dan regulator, kaki-kaki pada YS-1020UB dihubungkan dengan USBer serial.
Ground dan Vcc pada YS-1020UB selain terhubung dengan USBer rangkaian ini
juga terhubung dengan rangkaian kapasitor dan regulator (Gambar 7).
Gambar 8. Ilustrasi sistem pengiriman dan penerimaan data GPS
Sistem pengiriman data pada GPS hingga datanya dapat dilihat pada laptop yaitu dengan menggunakan gelombang radio sebagai sistem pemancarnya, gelombang radio yang digunakan yaitu 1020UB. Terdapat dua buah YS-1020UB yang berfungsi sebagai transmitter dan receiver. YS-YS-1020UB yang digunakan sebagai transmitter akan langsung dihubungkankan dengan GPS sedangkan YS-1020UB yang digunakan sebagai receiver akan dihubungkan dengan USBer RS-232 yang berfungsi sebagai serial komunikasi sehingga data dapat langsung dilihat dilayar laptop atau PC (Gambar 8).
GPS tipe PMB-648 ini memiliki spesifikasi dapat mengirimkan data hingga ketinggian 18.000 m dan kecepatan hingga 515 m/s. Setiap detik GPS akan mengirimkan data berupa data NMEA-0813. GPS ini juga memiliki antena sendiri yang dapat menerima sinyal hingga 20 satelit, dan memiliki akurasi data 5m ketika GPS menerima sinyal dengan baik dari satelit. GPS tipe ini memerlukan masukan tegangan sebesar 5 Volt dan arus 65 mA. Penerimaan data pada GPS ini memerlukan serial komunikasi berupa TTL maupun RS-232, dalam penelitian ini menggunakan USBer PC-link dimana serial komunikasi yang
23
digunakan yaitu RS-232, spesifikasi dari GPS tipe PMB-648 dapat dilihat pada tabel 5.
Tabel 5. Spesifikasi data pada GPS PMB-648 GPS IC SiRFstar III
Receiver: Tracking up to 20 Satellites L1, 1575.42 MHz, C/A Code Acquisition
Time :
Cold Start : 42 sec (Average) Warm Start : 38 sec (Average) Hot Start : 1 Sec (Min.)
Sensitivity: Acquisition : -148 dBm Tracking : -159 dBm Dynamics: Altitude: 1800m (Max.)
Velocity: 515 m/s (Max.) Acceleration: ±4g (Max.) Navigation
Update Rate:
Once per Second (min.) Serial Port: TTL, RS232 (Optional)
Baud Rate: 4800 bps (optional 9600, 19300, 38400 bps) Output
Message:
NMEA0813 V2.2 GGA, GSV, GSA, RMC (Optional VTG, GLL) Datum: WGS 84 Power supply: VDC 3.3V ~ 5V Power Compsumption: Typical 65mA @5VDC LED Function: Power on/off and Navigation Operating
Temp.:
-20 0C ~ +70 0C Storage Temp.: -30 0C ~ +85 0C Humidity: 5%~95%
Antenna Type: Built-in patch antenna
3.5.2.2 Elektronika Kamera CCTV
Kamera yang digunakan dalam pembuatan LAOC ini yaitu dengan menggunakan kamera CCTV jenis mini type low cost, sistem pentransmisian menggunakan gelombang radio, kamera cctv ini akan terhubung dengan sistem pentransmisi yang terdapat pada alat LAOC sedangkan USB TV box sebagai
transmitter yang akan langsung dapat menampilkan gambar pada layar PC atau
24
Gambar 9. Sistem pentransmisian kamera CCTV melalui gelombang radio
3.5.2.3 Elektronika Motor Wiper Penggerak LAOC
Pada rancang bangun LAOC ini motor wiper sebagai penggerak dari alat, motor wiper ini memiliki spesifikasi masukan tegangan 12 Volt dengan daya 150W, kondisi ini mempermudah motor untuk dapat berfungsi dengan baik walaupun membawa beban yang berat. Motor wiper ini terhubung dengan relay,
remote control, aki, dioda, resistor, dan LED. Motor wiper ini membutuhkan
tegangan 12 Volt yang diambil dari aki 6Volt yang dirangkai secara seri, resistor, LED, dioda dan saklar dirangkai bersama relay dan disambungkan pada remote
control. Spesifikasi dari motor yang digunakan untuk sistem penggerak dari alat
LAOC dapat dilihat pada tabel 6. Tabel 6. Spesifikasi motor wiper
Model Nominal Voltage Nominal Power No-Load Current
Stall Curernt No-Load Speed rpm Stall Torque ≥N.m Low Speed High Speed Low Speed High Speed Low Speed High Speed ZD1733 DC12V 150W 2.5 4.5 65 25 ± 5 35 ± 5 95
Ground pada motor wiper disambungkan dengan kaki 2 pada relay
pertama dan kaki 7 pada relay kedua, sedangkan Vcc pada motor wiper disambungkan dengan kaki 7 pada relay pertama dan kaki 2 pada relay ke-2. Rangkaian remote control akan dihubungkan dengan dioda dan disambungkan dengan kaki pertama pada relay yang disambungkan dengan relay kedua, dari relay kedua dipasangkan kembali kerangkaian motor wiper,
Kamera CCTV
25
26
kaki 4 pada masing-masing relay dihubungkan dengan aki positif dan kaki 8 pada kedua relay akan dihubungkan pada aki negatif (Gambar 10).
3.5.2.3 Elektronika Komponen GPS dan Kamera CCTV pada LAOC
Komponen GPS digabungkan dengan kamera CCTV sebab GPS memerlukan tegangan 5 Volt sehingga dapat disatukan dengan kamera CCTV. Penggabungan ini juga lebih mengefisienkan kerja saklar sebagai pemutus dan penghubung arus. GPS dan kamera CCTV dirangkai bersamaan dan dipisahkan dari rangkaian motor wiper. Rangkaian ini dimaksudkan agar tidak terganggu sistem pemancaran dan penerimaan data, sebab ketika GPS maupun kamera CCTV disatukan dengan motor, maka hasil dari pengiriman data akan terganggu sehingga gambar atau data yang diterima menjadi rusak.
Ground dan VCC pada rangkaian GPS dihubungkan dengan rangkaian
pada kamera CCTV. Rangkaian kamera dan GPS dirangkai kembali dengan LED sebagai indikatir alat berfungsi atau tidak dan dengan sakar tekan sebagai pemutus dan penghubung tegangan (Gambar 11).
27
28 3.5.3 Mekanisme Pembuatan Software
3.5.3.1 Pembuatan Software Google Sketch Up 7
Software yang digunakan untuk pembuatan desain mekanik ini yaitu dengan menggunakan software Google Sketch Up 7, Keterangan desain gambar dapat berupa 3D maupun 2D. Pembuatan desain ini dimaksudkan untuk mempermudah pada saat pembuatan alat (Gambar 12).
Gambar 12. Tampilan Google Skecth Up
3.5.3.2 Pembuatan Software Eagle 5.2.0
Software Eagle 5.2.0 ini merupakan software yang digunakan untuk membuat rangkaian pada rangkaian relay yang digunakan pada remote control, software ini sudah menyediakan komponen-komponen yang digunakan dalam rangkaian seperti , resistor, relay, LED dan kabel rangkaian secara terhubung atau tidak (Gambar 13).
29
Gambar 13. Tampilan Eagle 5.2.0 Light
3.5.3.3 Software Terminal.exe
Software ini digunakan untuk penampilan data GPS yang akan dikirimkan oleh YS-1020UB sebagai Transceiver, data ini mengirimkan posisi waktu dan tanggal pengambilan data, data yang akan ditampilkan masih berbentuk data NMEA-0813, yaitu bahasa yang digunakan oleh seluruh GPS. Perekaman data yang akan disimpan berupa format *.log (Gambar 14).
Gambar 14. Tampilan Terminal.exe Mengirim dan mematikan data
pengiriman
Port yang digunakan Perekaman data *.log
Data GPS dengan bahasa NMEA-0813
30
3.6 Proses Pembuatan Hasil Akhir
Hasil akhir dari perekaman data GPS yaitu berbentuk (*.log) dan perekeman video akan berbentuk (*.mpg), data GPS akan mengirimkan data posisi yang meliputi lintang dan bujur, waktu pengambilan data, tanggal pengambilan data, sinyal satelit yang diterima oleh GPS, ketinggian GPS dan kecepatan. Pengambilan data video akan direkam, hasil akhir yang dilakukan adalah mengetahui posisi dan waktu pengambilan dari objek yang terekam dalam video (Gambar 15).
Gambar 15. Diagram Alir Proses Hasil Akhir
3.7 Bahasa NMEA-0813 pada GPS tipe PMB 648
NMEA merupakan kalimat bahasa yang ada pada program GPS, NMEA ini meliputi kalimat, Keterangan pada kata pertama merupakan pendefinisian dari kalimat. Setiap jenis kata memiliki arti yang berbeda-beda seperti dibawah ini, merupakan program yang terdapat pada GPS tipe PMB-648 (Badelley, 2001). Data Global Positioning System (GPGGA)
$ GPGGA, 123456, 4807.038, N, 10643.4474, E, 1, 08, 0.9, 545.4, M, 46, 9, M, , *47
keterangan :
GGA = Data Global Positioning System
123456 = Waktu pengambilan data 12 :34 :56 UTC GPS
Mulai
Perekaman Video
Kamera CCTV Motor Wiper
*.mpg
Perekaman data Posisi, waktu, tanggal dan ketinggian
Pergerakan LLOC (maju dan mundur) *.log
31
4807.038, N = Lintang 480 07, 038’ N 10643.4474, E = Bujur 1060 43, 4474’ E
1 = Data yang digunakan baik; 0=data yang digunakan tidak valid 08 = Jumlah satelite yang dilacak
0, 9 = Posisi Horizontal yang lemah
545.4, M = Ketinggian dalam Meter diatas permukaan laut
46, 9, M = Tinggi Geoid (tinggi rata-rata permukaan laut) diatas WGS 84 *74 = data checksum, selalu dimulai dengan *
Status dari satelite yang terekam (GPGSA)
$ GPGSA, A, 3, 04, 05, , 09, 12 , , , 24 , , , , , 2.5, 1.3, 2.1 *39 Keterangan :
GSA = Status dari satelite
A = Auto ; M=Manual
3 = pilihan antara 3D dengan 2D (M =Manual) 04, 05 = PRNs dari satelit yang digunakan (spcae 12) 2, 5 = PDOP (ketelitian yang lemah)
1, 3 = Ketelitian secara horizontal (HDOP) 2, 1 = Ketelitian secara Vertikal (VDOP) *39 = Data checksum, selalu dimulai dengan * Data Satelit (GPGSV)
$ GPGSV, 2, 1, 08, 01, 40, 083, 46, 02, 17, 308, 41, 12, 07, 344, 39, 14, 22, 228, 45 *75
Keterangan :
GSV = Satelit
2 = Jumlah kalimat untuk data penuh 1 = Kalimat 1 dari 2
08 = Satelit yang dapat dideteksi 01 =Jumlah Satelit PRN
40 = Sudutelevasi 083 = sudut Azimuth
46 =SNR- lbih tinggi lebih baik
* 75 = Data Checksum, selalu dimulai dengan * Data posisi, kecepatan dan tanggal (GPRMC)
$ GPRMC, 123456, A, 4807, 038, N, 116, 138, E, 022.4, 084.4, 230394, 003.1, W * 6A
Keterangan :
RMC = Rekomendai kalimat C
32
A = status A =Aktif; V=Void 4807, 038, N = Lintang 48007, 038’ N 1167, 138, E = Bujur 11607, 138’ E
022, 4 = Kecepatan diatas tanah dalam knot 0, 084.4 = Sudut dalam derajat
230394 = Tanggal pengambilan data 23 Maret 1994 003, 1, W = Variasi magnetic
*6A = Data checksum, selalu dimulai dengan *
3.8 Perhitungan Laju Alat LAOC
Laju alat dihitung secara perumusan,menurut Giancoli (2001) laju merupakan seberapa jauh sebuah benda berjalan dalam suatu selang waktu tertentu. Rumus dari laju yaitu: