APLIKASI METODE EULER PADA MODEL MATEMATIKA SISTEM
PEGAS-PEREDAM UNTUK MIKROKANTILEVER SENSOR
Ratno Nuryadi
Pusat Teknologi Material, Badan Pengkajian dan Penerapan Teknologi Jl. M.H. Thamrin No. 8 Jakarta, 10340, Indonesia
E-mail: [email protected]
Abstrak
Dalam 10 tahun terakhir ini, potensi mikrokantilever untuk aplikasi sensor di bidang kimia, fisika, biologi dan lingkungan ramai diteliti oleh banyak ilmuan. Hal ini karena mikrokantilever mampu mendeteksi suatu partikel yang sangat kecil bahkan sampai order attogram (10-18 gram). Meski telah banyak studi baik dari sisi eksperimen maupun teori, fenomena dibalik proses sensing mikrokantilever masih menyisakan banyak pertanyaan. Model matematika pun menjadi salah satu cara menerangkan fenomena tersebut. Pada makalah ini akan dipaparkan aplikasi metode Euler pada model matematika untuk sistem pegas-peredam dalam upaya menerangkan proses sensing partikel dengan menggunakan mikrokantilever. Hasil simulasi setelah diproses dengan analisis Fast Furrier Transform menunjukkan adanya pergeseran frekuensi resonansi dari vibrasi mikrokantilever karena menempelnya partikel pada permukaan mikrokantilever. Hal ini mengindikasikan bahwa model ini dapat dipakai untuk menerangkan proses sensing pada sensor berbasis mikrokantilever.
Kata kunci: Mikrokantilever, sensor, sistem pegas-peredam, simulasi, metode Euler
Pendahuluan
Biosensor adalah sensor di mana interaksi biomolekuler digunakan sebagai reaksi sensing (penginderaan). Interaksi biomolekuler ini bila dikombinasikan dengan struktur mikrokantilever dapat menghasilkan biosensing yang sangat sensitif (Baselt et al., 1997, Arntz et al., 2003, Knowles et al., 2008). Struktur mikrokantilever ini sangat lentur sehingga jika terjadi adsorpsi molekul pada permukaan mikrokantilever, maka mikrokantilever akan membungkuk/deflesi
(bending) disebabkan oleh tegangan permukaan yang timbul karena beban massa obyek yang
menempel. Sensor berbasis mikrokantilever memiliki dua jenis mode operasi, yaitu mode statis, di mana sistem sensor akan mendeteksi defleksi mikrokantilever yang timbul karena massa obyek yang menempel pada permukaan mikrokantilever, dan mode dinamis, di mana sistem sensor akan mendeteksi frekuensi resonansi yang bergeser karena massa obyek yang melekat pada permukaan mikrokantilever.
Sebagaimana perangkat biosensor lainnya, sensor berbasis mikrokantilever dapat dibagi menjadi tiga komponen utama: detektor yang mendeteksi massa obyek yang menempel pada permukaan mikrokantilever melalui defleksi mikrokantilever, transduser yang mengubah informasi defleksi mikrokantilever menjadi sinyal listrik, dan sistem read-out yang membaca sinyal listrik dan menampilkannya pada layar (Roberto et al., 2001). Ada berbagai cara mengubah informasi defleksi mikrokantilever menjadi sinyal listrik, seperti metode optik, metode kapasitor dan metode piezoresistansi (Roberto et al., 2001). Masing-masing mempunyai kelebihan dan kekurangan, namun yang dikenal sistemnya sederhana adalah metode piezoresistansi.
Selama ini, berbagai pendekatan riset telah dilakukan dalam rangka menggali potensi mikrokantilever sensor, baik dari sisi eksperimen (Calleja et al., 2005, Zhang et al., 2004, Baselt et al., 2003), teori maupun simulasi (Lobontiu et al., 2009, Nuryadi et al., 2011, Johnson et al., 2006). Dari sisi simulasi, berbagai model telah diusulkan untuk menerangkan fenomena sensing pada mikrokantilever sensor, salah satu diantaranya adalah model sistem pegas dan peredam (Nuryadi et al., 2011, Johnson et al., 2006). Pada model sistem pegas-peredam ini ada beberapa pendekatan penyelesaian yang telah diusulan. Makalah ini memaparkan aplikasi metode Euler pada penyelesaian sistem pegas-peredam dalam rangka menerangkan proses sensing pada biosensor berbasis mikrokantilever.
Formulasi Persamaan Differensial pada Sistem Pegas-Peredam
diberi tegangan berbentuk fungsi sinus. Hasilnya, piezoelektrik akan bergetar dengan frekuensi tertentu, dan demikian juga mikrokantilever di atasnya akan mengikutinya. Pada kondisi demikian, model yang cocok dan mendekati sistem ini adalah kombinasi sistem pegas dan peredam (Johnson
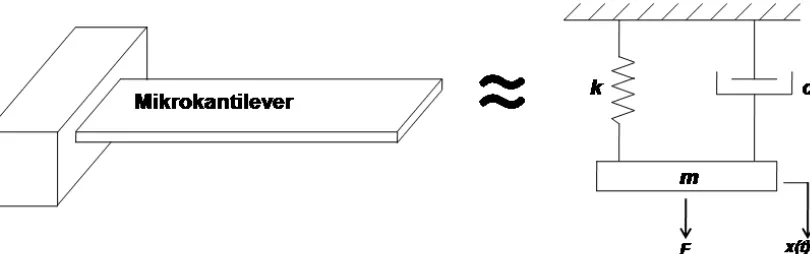
et al., 2006, Nuryadi et al., 2011), sebagaimana terlihat pada Gambar 1. Pada model ini, pegas
yang mempunyai konstanta pegas k, dan peredam yang memiliki koefisien peredaman (damping constant) c tersusun secara parallel. Pada model sederhana ini dapat diprediksi pergerakan mikrokantilever sebagaimana analisa di bawah.
Gambar 1. Ilustrasi mikrokantilever dan model pergerakannya dalam sistem pegas-peredam
Dengan mengasumsikan bahwa massa mikrokantilever adalah m dan ujung mikrokantilever bergerak secara vertical naik turun, maka berdasarkan hukum Newton kedua, persamaan gerak dapat dirumuskan gerak sebagai berikut.
Massa×Percepatan= ̈ (1)
Di sini, ̈ = ⁄ , dan ̈ juga merupakan total gaya dari semua gaya yang mengenai bodi sistem. Dengan mendefinisikan ( )adalah pergeseran dari bodi dalam fungsi waktu t, dan pergerakan mikrokantilever ke arah bawah bernilai positif, sedangkan pergerakan ke arah atas bernilai negatif, maka gaya pegas dan gaya peredam dapat dinyatakan sebagai berikut. Gaya pegas
= − , sedangkan gaya peredam = − ̇, di mana ̇ = ⁄ . Karena itu, total gaya dapat ditulis menjadi,
= + = − − ̇ (2)
Dari persamaan (1) dan persamaan (2) dapat diformulasikan persamaan gerak pegas sebagai berikut,
̈ = − − ̇, (3)
yang kemudian dapat ditulis menjadi persamaan differensial tingkat 2 sebagaimana persamaan (4) berikut,
Metode Euler
Persamaan differensial tingkat 2 pada persamaan (4) dapat diselesaikan dengan metode Euler. Pada metode ini berlaku ketentuan sebagai berikut.
= ( , , ) (5)
= ( , , ) (6)
(0) = , (0) =
Di mana t > 0 baik untuk fungsi ( ) dan ( ). Selanjutnya karena baik persamaan (5) maupun (6) adalah persamaan differensial tingkat 1, maka metode finite difference dapat diaplikasikan. Dengan mendefinisikan selisih waktu adalah harga positif, maka = . Harga ( ) dan
Selanjutnya, algoritma untuk perhitungan numerik metode Euler diterangkan di bawah ini. Diasumsikan bahwa waktu yang diperlukan untuk memperoleh jawaban adalah T, sehingga selisih waktu dapat ditulis sebagai = ⁄ , di mana N adalah jumlah pembagi waktu. Dengan demikian, algoritma dari persamaan (7) dapat dibuat sebagai berikut.
a. Membuat definisi T, N
Dalam rangka mengaplikasikan metode Euler pada persamaan (4), persamaan (4) ditulis kembali menjadi,
̈ + ̇ + = 0, (8)
(0) = , (0) = 0.
Persamaan (8) selanjutnya dirubah ke dalam bentuk persamaan (5) dan (6) menjadi,
̇ =
̇ = − − −
(0) = , (0) = 0. (9)
Hasil dan Pembahasan
Simulasi dilakukan dengan memberikan parameter-parameter sebagai berikut: k=40 [N/m],
c=4e-7 [Pa], m=46e-12 [gram], a1=1e-6 [m], N=10000, tmin=0 [s], dan tmax=0.0001 [s]. Harga
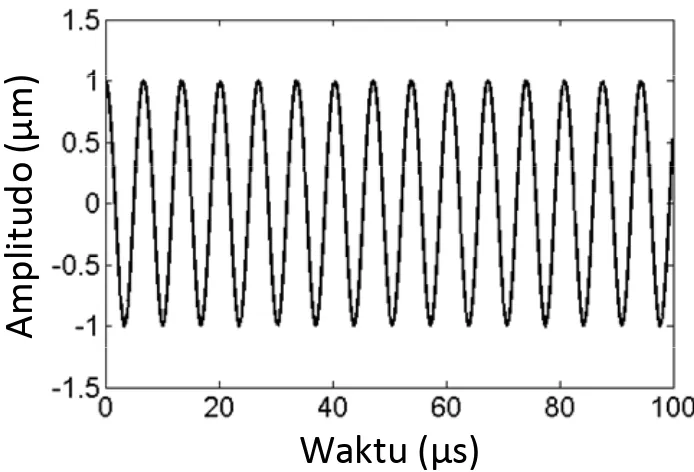
parameter-parameter ini sudah disesuaikan dengan mikrokantilever buatan Seiko Instrument. Simulasi dilakukan dengan MATLAB. Gambar 2 menunjukkan hasil simulasi pergerakan mikrokantilever dalam fungsi waktu sebelum permukaan mikrokantilever diberi beban obyek. Pergerakan mikrokantilever berbentuk fungsi sinus dengan amplituda 1 μm dan perioda gelombang 6.75 μs. Bentuk pergerakan ini merupakan bentuk umum solusi persamaan differensial tingkat 2 pada persamaan (9). Karena itu ini mengindikasikan bahwa metode penyelesaian yang dilakukan pada makalah ini benar adanya.
Gambar 2. Hasil simulasi pergerakan mikrokantilever sebelum diberi tambahan massa partikel.
Gambar 3. Hasil simulasi pergerakan mikrokantilever sesudah diberi tambahan massa partikel.
Waktu (μs)
A
m
p
li
tu
d
o
(μ
m
)
Waktu (μs)
A
m
p
li
tu
d
o
(μ
m
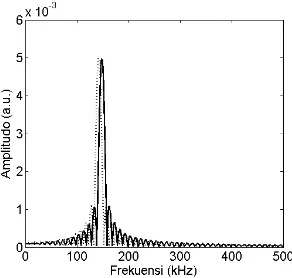
Selanjutnya, permukaan mikrokantilever ditempelkan/ditambahkan partikel dengan massa 4 ng, dan kemudian dilakukan simulasi dengan cara yang sama. Hasilnya sebagaimana terlihat pada Gambar 3. Terlihat di sini, pergerakan mikrokantilever mempunyai bentuk fungsi sinus sebagaimana yang ditunjukkan pada Gambar 2. Bahkan besar amplitudo dan periodenya pun cenderung sama. Sulit membedakan hasil pada Gambar 2 dan hasil pada Gambar 3. Untuk mengatasi problem ini, yaitu mengetahui perbedaan antara Gambar 2 dan Gambar 3, dilakukan analisis Fast Furrier Transform (FFT) untuk kedua grafik tersebut. Hasilnya sebagaimana terlihat di Gambar 4. Pada grafik FFT ini, ada dua hasil, yaitu grafik dengan garis normal yang merupakan hasil FFT dari Gambar 2 (sebelum permukaan mikrokantilever ditempelkan partikel), dan grafik dengan garis putus-putus yang merupakan hasil FFT dari Gambar 3 (sesudah permukaan mikrokantilever ditempelkan partikel). Terlihat, meskipun antara Gambar 2 dan Gambar 3 tidak terlihat jelas perbedaannya, ada perbedaan antara grafik sebelum dan sesudah partikel ditempelkan pada permukaan mikrokantilever. Puncak frekuensi resonansi bergeser ke kiri sebesar kurang lebih 148.45-142.37=6.08 kHz karena penambahan partikel tersebut. Hasil demikian normal dan sesuai dengan teori, di mana resonansi frekuensi akan turun ketika massa m bertambah. Demikian penggunaan metode Euler ini dapat menyelesaikan persamaan differensial tingkat dua dari sistem pegas-peredam untuk menerangkan fenomena sensing pada mikrokantilever sensor.
Gambar 4. Hasil analisis Fast Furrier Transform (FFT) dari grafik pada Gambar 2 (garis normal) dan dari grafik pada Gambar 3 (garis putus-putus).
Kesimpulan
Ucapan Terima kasih
Terima kasih disampaikan kepada Kementrian Riset dan Teknologi atas dana riset insentif 2011 (No. RT-2011-1042) dan 2012 (No. RT-2012-85) yang memberikan support kegiatan ini dan kepada Sdri. Lia Aprilia dan Sdri. Winda Rianti atas diskusi yang dalam pada riset ini.
Daftar pustaka
Arntz, Y., Seelig, J.D., Lang, H.P., Zhang, J., Hunziker, P., Ramseyer, J.P., Meyer, E., Hegner, M., Gerber, C., 2003, Label-free protein assay based on a nanomechanical cantilever array.
Nanotechnology, vol. 14, 86–90.
Baselt, D.R., Fruhbergera, B., Klaassena, E., Cemalovica, S., Britton Jr., C.L., Patela, S.V., Mlsnaa, T.E., McCorkleb, D., Warmack, B., 2003, Design and performance of a microcantilever-based hydrogen sensor, Sensors and Actuators B, vol. 88, 120–131.
Baselt, D.R., Lee, G. U., Hansen, K.M., Chrisey, L.A., Colton, R.J., 1997, A High-Sensitivity Micromachined Biosensor, Proceeding of IEEE, vol. 58. no 4, 672-680.
Calleja, M., Nordstrom, M., Alvarez, M., Tamayo, J., Lechuga, L.M., Boisen, A., 2005, Highly sensitive polymer-based cantilever-sensors for DNA detection, Ultramicroscopy, vol. 105, 215– 222.
Johnson, L., Gupta, A.K., Ghafoor, A., Akin, D., Bashir, R., 2006, Characterization of vaccinia virus particles using microscale silicon cantilever resonators and atomic force microscopy, Sensors
and Actuators B : Chemical, vol. 115, 189–197,
Knowles, T.P.J., Shu, W., Huber, F., Lang, H.P., Gerber, C., Dobson, C.M., Welland, M.E., 2008, Label-free detection of amyloid growth with microcantilever sensors, Nanotechnology, vol. 19, 384007:1–384007:5.
Lobontiu, N., Ilic, B., Reissman, T., Garcia, E., Nam, Y., Craighead, H.G., 2009, Modeling, Design and Experimental Characterization of Bending Resonant Circular Nano Cantilevers, Micro and
Nanosystems, vol. 1, 22-29.
Ratno Nuryadi, Lia Aprilia, Nuning Aisah, 2011, Modeling and Simulation of Microcantilever Sensor Based on Spring System, Proceeding of International Conference on Mathematics and
Sciences, Surabaya, pp. OP19_1-OP19_8.
Roberto Raiteri, Massimo Grattarola, Hans-Ju¨rgen Butt, Petr Skla´dal, 2001, Micromechanical cantilever-based biosensors, Sensors and Actuators B, vol. 4010, 1–12.