i
PROPOSAL
PENELITIAN UNGGULAN
DANA ITS TAHUN 2020
Judul Penelitian:
Pengembangan dan Pengujian Lapangan (Site test)
Pembangkit Listrik Tenaga Gelombang Laut (PLTGL) - Sistem Multi Pendulum
Tim Peneliti:
Dr. Ridho Hantoro, S.T., M.T. Irfan Syarif Arief, S.T., M.T. Erna Septyaningrum, S.T., M.T.
DIREKTORAT RISET DAN PENGABDIAN KEPADA MASYARAKAT
INSTITUT TEKNOLOGI SEPULUH NOPEMBER
SURABAYA
i
DAFTAR ISI
DAFTAR ISI ... i
DAFTAR TABEL ... ii
DAFTAR GAMBAR ... iii
DAFTAR LAMPIRAN ... iv BAB I RINGKASAN ... 1 BAB II PENDAHULUAN ... 2 2.1 Latar Belakang ... 2 2.2 Perumusan Masalah ... 3 2.3 Tujuan ... 4 2.4 Urgensi Penelitian ... 4 2.5 Target Luaran ... 5
BAB III TINJAUAN PUSTAKA ... 6
3.1 Pengembangan Pembangkit Listrik Tenaga Gelombang Laut (PLTGL) – Sistem Bandul ... 6
3.2 Teknologi Pembangkit Listrik Tenaga Gelombang (PLTGL) ... 7
3.3 Gelombang Laut ... 9
3.4 Gelombang Reguler dan Irreguler ... 10
3.5 Gerakan Benda Apung ... 10
3.6 Respon Amplitudo Operator... 11
3.7 Teori Stabilitas ... 12
3.8 Gerak Harmonik Sederhana ... 14
BAB IV METODOLOGI PENELITIAN ... 17
BAB V ORGANISASI TIM, JADWAL DAN ANGGARAN BIAYA ... 22
5.1 Organisasi Tim Peneliti ... 22
5.2 Jadwal Penelitian ... 23
5.3 Anggaran Biaya ... 25
BAB VI DAFTAR PUSTAKA ... 27
ii
DAFTAR TABEL
Tabel 1. Dimensi Ponton ... 19 Tabel 2. Jadwal Penelitian Tahun 1 (Pelaksanaan Tahun 2020), Fabrikasi Sistem Ponton dan Mekanik PLTGL ... 23 Tabel 3. Jadwal Tahun 2 (Pelaksanaan Tahun 2021), Pengujian pada Lingkungan Laut ... 24 Tabel 4. Rincian anggaran biaya (Pelaksanaan tahun 2020) ... 25 Tabel 5. Rincian anggaran biaya (Pelaksanaan tahun 2021) ... 26
iii
DAFTAR GAMBAR
Gambar 1. Rencana Induk Riset Nasional 2017-2045 untuk Fokus Energi Baru
Terbarukan ... 2
Gambar 2. Roadmap Pengembangan PLTG – Sistem Pendulum ... 6
Gambar 3. Site test Ponton single pendulum ... 7
Gambar 4 Konsep desain PLTGL [6]. ... 8
Gambar 5. Instalasi PLTGL [6]. ... 8
Gambar 6. Wave direction ... 9
Gambar 7. Six Degree of Freedom (SDOF) Gerakan Kapal ... 11
Gambar 8. Bentuk Umum Grafik Respon Gerakan Bangunan ... 12
Gambar 9. Tiga Kondisi Kestabilan ... 13
Gambar 10. Contoh Titik Berat Sebuah Benda Terapung ... 13
Gambar 11. Letak Titik Berat di Air ... 14
Gambar 12. Letak Titik Metacenter ... 14
Gambar 13. Ilustrasi gerak harmonik sederhana ... 14
Gambar 14. Gaya yang bekerja pada pendulum ... 15
Gambar 15. Diagram Alir Penelitian Tahun Pertama ... 17
Gambar 16 Diagram Alir Penelitian Tahun Kedua ... 18
Gambar 17. Desain Ponton Segienam ... 19
iv
DAFTAR LAMPIRAN
Biodata Tim Peneliti ... 28 Surat Pernyataan Kesediaan Anggota Tim Peneliti ... 32
1
BAB I RINGKASAN
Pembangkit Listrik Tenaga Gelombang Laut (PLTGL) merupakan salah satu bentuk pengembangan dari pemanfaatan energi terbarukan sebagai pengganti energi berbahan bakar fosil. Optimalisasi pemanfaatan energi terbarukan merupakan salah satu cara yang dilakukan untuk mencapai target bauran energi nasional yang tertuang dalam Peraturan Pemerintah Nomor 79 Tahun 2014 tentang Kebijakan Energi Nasional (KEN). Indonesia ditargetkan mampu meningkatkan pemanfaatan energi terbarukan lebih dari 23% dari total penggunaan energi nasional pada tahun 2025 dan lebih dari 31% pada tahun 2050. Sedangkan pemanfaatan energi terbarukan pada tahun 2016 tercatat masih pada angka 7,7 %, cukup jauh dari target KEN [1]
Ditinjau dari potensi Indonesia, pengembangan pembangkit listrik tenaga gelombang laut ini merupakan salah satu sistem konversi energi yang sangat potensial untuk diimplementasikan. Indonesia merupakan negara kepulauan yang memiliki luas perairan sekitar 3.544.743,9 km2 [2], sehingga memiliki potensi yang besar untuk sumber energi laut yang dapat dikonversikan menjadi energi listrik. Menurut teori sumber daya energi laut global setara dengan 17.400 Terra Watt jam/tahun [3]. Sedangkan potensi sumber energi laut Indonesia mencapai 4.680 Giga Watt(GW) namun turun menjadi 61 Giga Watt(GW) karena adanya pertimbangan kemajuan teknologi dan kendala transportasi laut serta kondisi lingkungan di dasar laut [4].
Pengembangan PLTGL yang dilakukan oleh tim pengembang ITS saat ini telah mencapai TKT 4, dimana sebelumnya telah telah dilakukan pengujian laboratorium untuk sistem konversi PLTGL untuk mendapatkan desain bandul dan ponton yang baik. Melalui penelitian yang akan dijalankan tahun ini, diharapkan penelitian mengenai PLTGL ini dapat mencapai TKT 5 dimana akan dilakukan site test untuk system PLTGL yang telah dimodifikasi dari hasil evaluasi penelitian sebelumnya. Tahapan – tahapan yang akan dilakukan antara lain membuat desain dari PLTGL system multi pendulum berupa ponton bentuk katamaran dan ponton limas segilima beserta pendulumnya. Melakukan simulasi dari desain yang telah dibuat untuk mendapatkan desain yang terbaik. Selanjutnya dilakukan fabrikasi dan integrasi sistem PLTGL dan dilanjutkan untuk uji lapangan (site test).
Luaran penelitian yang dihasilkan yaitu purwarupa berupa sistem konversi energi Pembangkit Listrik Tenaga Gelombang Laut (PLTGL) – Sistem Multi Pendulum, dan publikasi makalah ilmiah pada Seminar International untuk tahun pertama. Tahun kedua target luaran yang akan dihasilkan antara lain, hasil site test di lingkungan laut, draft paten, publikasi pada jurnal international terindeks, studi kelayakan bisnis dan analisa LRIP.
2
BAB II PENDAHULUAN
2.1 Latar Belakang
Pembangkit Listrik Tenaga Gelombang Laut (PLTGL) merupakan salah satu bentuk pengembangan dari pemanfaatan energi terbarukan sebagai pengganti energi berbahan bakar fosil. Penggunaan energi terbarukan ini telah diatur dalam UU No. 30/2007 tentang Energi, PP No 03 tahun 2005 tentang Pemanfaatan Energi Terbarukan. Optimalisasi pemanfaatan energi terbarukan merupakan salah satu cara yang dilakukan untuk mencapai target bauran energi nasional yang tertuang dalam Peraturan Pemerintah Nomor 79 Tahun 2014 tentang Kebijakan Energi Nasional (KEN). Indonesia ditargetkan mampu meningkatkan pemanfaatan energi terbarukan lebih dari 23% dari total penggunaan energi nasional pada tahun 2025 dan lebih dari 31% pada tahun 2050. Sedangkan pemanfaatan energi terbarukan pada tahun 2016 tercatat masih pada angka 7,7 %, cukup jauh dari target KEN [1].
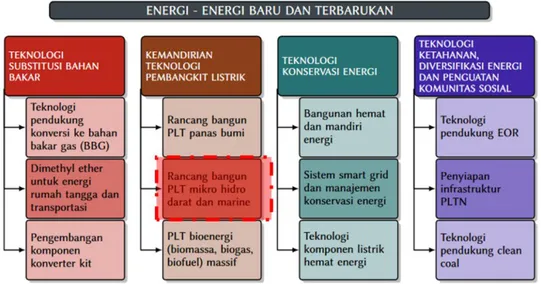
Gambar 1. Rencana Induk Riset Nasional 2017-2045 untuk Fokus Energi Baru Terbarukan
Salah satu upaya pemerintah untuk meningkatkan energi terbarukan di Indonesia adalah dengan diterbitkannya Rencana Induk Riset Nasional Tahun 2017 – 2045, dimana energi baru terbarukan menjadi salah satu prioritas riset nasional. Salah satu fokus pemerintah dalam rencana induk adalah untuk meningkatkan kemandirian teknologi pembangkit listrik melalui pengembangan rancang bangun PLT mikrohidro darat dan marine / laut, seperti ditunjukkan pada Gambar 1. Oleh karena itu, riset tentang pembangkit listrik tenaga gelombang laut ini sejalan dengan dengan rencana induk riset nasional.
Jika ditinjau dari potensi Indonesia, pengembangan pembangkit listrik tenaga gelombang laut ini merupakan salah satu sistem konversi energi yang sangat
3
potensial untuk diimplementasikan. Indonesia merupakan negara kepulauan yang memiliki luas perairan sekitar 3.544.743,9 km2 [2], sehingga memiliki potensi yang besar untuk sumber energi laut yang dapat dikonversikan menjadi energi listrik. Menurut teori sumber daya energi laut global setara dengan 17.400 Terra Watt jam/tahun [3]. Sedangkan potensi sumber energi laut Indonesia mencapai 4.680 Giga Watt(GW) namun turun menjadi 61 Giga Watt(GW) karena adanya pertimbangan kemajuan teknologi dan kendala transportasi laut serta kondisi lingkungan di dasar laut [4].
Di beberapa negara Wave Energy Converter (WECs) telah banyak dikembangkan sebagai energy alternative pengganti energ fosil. Tahun 2015 China melalui
Guangzhou Institute of Energy Conversion (GIEC) mengembangkan sebuah
prototype Sharp Eagle WEC dengan ukuran 36m x 24m x 16m dengan kapasitas
daya 100kW di Pulau Wanshan [5]. Yoshio Masuda mengembangkan buoy yang selanjutnya dinamakan floating oscillating water column dan dikembangkan sejak tahun 1965 [6]. Denmark juga telah mengembangkan WECs jenis overtopping
device yang diberi nama Wavedragon [7]. Norwegia juga mengembangkan WECs
dengan jenis yang sama bernama Tapered Channel Wave Power Device (Tapchan) [8].
Di Indonesia juga telah dikembangkan alat konversi energi gelombang laut menjadi energi listrik yaitu pembangkit listrik tenaga gelombang laut sistem bandul (PLTG-SB). Penelitian ini dilakukan pertama kali oleh Zamrisyaf pada tahun 2002. Prinsip kerja dari PLTG-SB ini adalah sistem yang sudah dirancang dalam bentuk ponton, ditempatkan mengapung di atas permukaan air laut. Kemudian sistem tersebut akan mengikuti gerak atau arus gelombang sesuai frekuensi gelombang laut sehingga menyebabkan bandul bergerak. Gerakan tersebut kemudian ditransmisikan dalam gerakan berputar untuk menggerakkan generator kemudian menjadi energi listrik. Daya yang dihasilkan oleh PLTG-SB ini banyak dipengaruhi oleh dimensi ponton, panjang bandul, massa bandul dan susunan ponton [9]. Pengembangan PLTGL yang dilakukan oleh tim pengembang ITS saat ini telah mencapai TKT 4, dimana sebelumnya telah telah dilakukan pengujian laboratorium untuk sistem konversi PLTGL untuk mendapatkan desain bandul dan ponton yang baik. Melalui penelitian yang akan dijalankan tahun ini, diharapkan penelitian mengenai PLTGL ini dapat mencapai TKT 5 dimana akan dilakukan site test untuk ponton yang telah dimodifikasi dari hasil evaluasi penelitian sebelumnya.
2.2 Perumusan Masalah
Berdasarkan latar belakang tersebut, maka rumusan masalah dalam penelitian ini adalah sebagai berikut
4
Tahun 1 (Pelaksanaan Tahun 2020), Fabrikasi Sistem Ponton dan Mekanik PLTGL
Ponton merupakan salah satu bagian penting dalam suatu sistem Pembangkit Listrik Tenaga Gelombang Laut (PLTGL), dimana bagian ini merupakan bagian yang berperan besar dalam menangkap energi gelombang. Desain sistem ponton yang mampu menghasilkan simpangan yang besar untuk amplitude dan frekuensi gelombang yang kecil sangat diperlukan untuk dapat menghasilkan energi listrik yang besar. Maka pada tahun pertama ini akan dilakukan pengembangan system ponton dan fabrikasi system ponton yang mampu menghasilkan simpangan maksimal.
Tahun 2 (Pelaksanaan Tahun 2021), Pengujian pada Lingkungan Laut
Teknologi PLTGL perlu diintegrasikan dengan sistem elektrik untuk dapat menghasilkan energi listrik. Pengujian lapangan juga pada lingkungan laut perlu dilakukan untuk mengetahui kinerja dari dari sistem PLTGL yang sudah diintegrasikan dengan sistem elektrik. Dari aspek bisnis, perlu dilakukan kajian teknologi, kampuan manufaktur sesuai material yang tersedia, kelayakan bisnis serta kelayakan ekonomi, sebelum teknologi ini diimplementasikan di masyarakat.
2.3 Tujuan
Tujuan yang akan dicapai dalam penelitian adalah sebaga berikut:
Tujuan 1 (Pelaksanaan Tahun 2020)
1. Pembuatan DED PLTGL. DED dibuat berdasarkan desain ponton dan sistem mekanik yang telah disimulasikan dan dianalisa sebelumnya
2. Melakukan fabrikasi dan integrasi antara ponton dan sistem mekanik.
Tujuan 2 (Pelaksanaan Tahun 2021)
1. Pelaksanaan pengujian di lingkungan laut. Pengujian ini akan dilakukan di dua lokasi yang berbeda, yang merepresentasikan kondisi perairan di Indonesia
2. Penyusunan draft paten dan pendaftaran paten 3. Studi kelayakan bisnis sistem PLTGL
2.4 Urgensi Penelitian
Beberapa hal yang dianggap urgen dalam penelitian ini adalah sebagai berikut: 1. Teknologi PLTGL ini merupakan teknologi yang potensial untuk
diimplementasikan, mengingat Indonesia memiliki potensi energi gelombang yang besar. Selama ini, pengembangan energi terbarukan di
5
Indonesia masih berfokus pada sumber energi yang ada di daratan, sehingga pengembangan energi laut masih belum banyak dilakukan.
2. Dari aspek kebermanfaatan, teknologi PLTGL ini dapat digunakan sebagai sistem off grid maupun on grid. Sebagai sistem off grid, teknologi ini dapat digunakan untuk suplai kebutuhan listrik di pulau-pulau terpencil di Indonesia yang belum mendapatkan akses listrik on grid. Hal ini juga merupakan salah satu upaya untuk meningkatkan rasio elektrifikasi di Indonesia. Selain itu, PLTGL dapat dibuat dalam bentuk modular untuk skala kecil, sehingga dapat digunakan untuk penerangan bangunan lepas pantai, seperti bagang apung. Bentuk modular dari PLTGL menjadikan teknologi ini lebih fleksibel, dimana kapasitas pemasangannya dapat disesuikan dengan kebutuhan.
3. Pengembangan sistem PLTGL ini sejalan dengan roadmap penelitian Laboratorium Rekayasa Energi dan Pengkondisian Lingkungan Teknik Fisika ITS. Lebih lanjut topik penelitian ini juga merupakan focus penelitian unggulan di pusat studi Energi Berkelanjutan ITS dan Rencana Induk Riset Nasional 2017-2045 yang dikeluarkan oleh Kementrian Riset, Teknologi dan Pendidikan Tinggi.
2.5 Target Luaran
Adapun luaran penelitian yang akan dihasilkan adalah sebagai berikut:
Tahun 1 (Pelaksanaan 2020)
1. Perhitungan dan DED PLTGL (Ponton dan system pendulum)
2. Purwarupa berupa ponton dan system multi pendulum Pembangkit Listrik Tenaga Gelombang Laut (PLTGL)
3. Publikasi makalah ilmiah pada Seminar International
Tahun 2 (Pelaksanaan 2021)
1. Integrasi elektrik dan pengujian kinerja PLTGL pada lingkungan laut 2. Penyusunan Draft Paten sederhana
3. Publikasi pada jurnal international terindeks 4. Hasil studi kelayakan bisnis dan analisa LRIP
6
BAB III
TINJAUAN PUSTAKA
3.1Pengembangan Pembangkit Listrik Tenaga Gelombang Laut (PLTGL) – Sistem Bandul
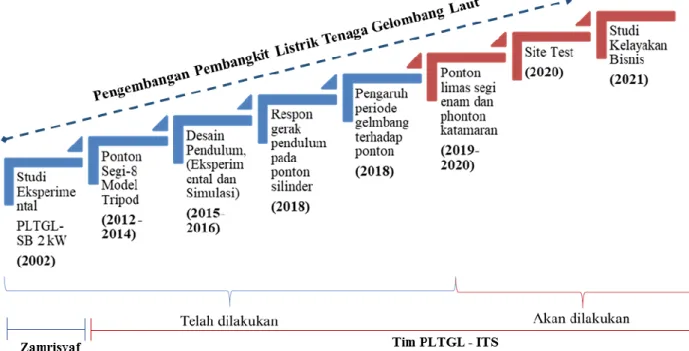
Pengembangan PLTGL-Sistem Pendulum ini dilakukan mulai tahun 2002 yang dilakukan secara eksperimental menggunakan ponton berukuran 4,8 m x 3 m x 3 m dengan besar 13 ton, dan mampu menghasilkan daya kurang lebih 2 kW. Penelitian ini kemudian terus dilakukan untuk menganalisa aspek krusial dari sistem ini, yaitu sistem ponton dan sistem pendulum, seperti ditunjukkan pada Gambar 2. Penelian lebih lanjut perlu dilakukan untuk mendapatkan sistem PLTGL yang lebih optimal
Gambar 2. Roadmap Pengembangan PLTG – Sistem Pendulum
Tahun 2016 telah dilakukan penelitian ponton model silinder dengan silinder kecil (jukung) di kedua sisinya. Penelitian ini menggunakan ponton single pendulum dengan menganalisa respon gerak ponton dan pendulum menggunakan variasi panjang lengan jukung, tinggi jukung dan tinggi sarat air. Hasilnya bentuk ponton terbaik yaitu dengan pangan lengan jukung 41.5 cm, tinggi jukung 1.5 cm dan tinggi sarat air 2/3 diameter ponton, menghasilkan simpangan maksimal 23.5° [21]. Pada tahun yang sama juga dilakukan penelitian dengan bentuk ponton yang sama dengan melakukan analisa karakteristik osilasi pendulum pada variasi percobaan massa pendulum, panjang lengan pendulum, panjang lengan cadik dan keinggian cadik. Hasilnya nilai simpangan maksimum dan simpangan rata-rata
7
paling besar yaitu 41.82° pada variasi massa 20 gram, panjang lengan pendulum 106.7 mm, panjang lengan cadik 413 mm dan tinggi cadik 40 mm [22].
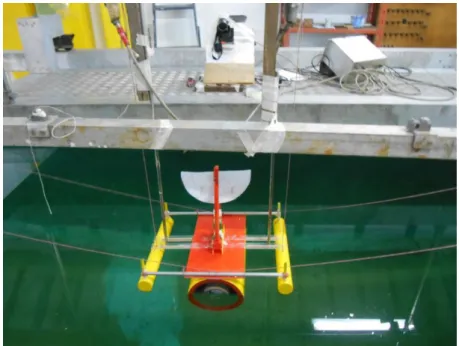
Gambar 3. Site test Ponton single pendulum
Melanjutkan peneltian sebelumnya, tahun 2018 telah dibuat pemodelan sistem gerak pendulum pada model ponton single pendulum menggunakan software Matlab. Tujuannya untuk mengetahui dan memprediksi respon yang akan dihasilkan oleh pendulum. Hasilnya respon gerak pendulum yang paling baik adalah yang memiliki simpangan pendulum paling besar, sebesar 56.37° dengan panjang lengan cadik 515 mm dan massa pendulum 40 gram [10]. Penelitian terbaru yang telah dilakukan pada tahun 2019 dengan model ponton silinder yaitu membuat simulasi respon gerak pada ponton multi pendulum menggunakan software
Computational Fluid Dynamic (CFD). Variasi pada simulasi yang dilakukan yaitu
massa pendulum, panjang lengan pendulum, jumlah pendulum, sarat air, amplitudo dan periode gelombang. Hasil dari penelitian ini diperoleh nilai daya terbesar yang dihasilkan yaitu 0.02697 watt pada gelombang dengan amplitudo 1.75 cm periode 0.8 detik sarat air 1/2 D dan massa pendulum 40 gram [11].
3.2 Teknologi Pembangkit Listrik Tenaga Gelombang (PLTGL)
Teknologi sistem konversi energi gelombang laut terdiri dari beberapa konsep yaitu Point Absorber, Overtopping device, Oscillating Water Column (OWC),
Attenuators, Oscillating Wave Surge Converter (OWSC) dan Submerged Pressure
8
Gambar4 Konsep desain PLTGL [6].
Beberapa negara sudah banyak mengembangkan teknologi pembangkit listrik ini. Dari macam – macam konsep pembangkit listrik tenaga gelombang pada Gambar 4, berikut instalasi yang sudah dilakukan di beberapa negara yang disajikan pada Gambar 5 di bawah ini
Gambar5. Instalasi PLTGL [6].
Teknologi untuk mengeksploitasi gelombang laut dalam bentuk energi pertama kali ditemukan oleh Girard seorang ilmuan dari Perancis pada tahun 1799. Pada abad ke-19, seorang insinyur bernama M. Fursenot di Algeria mengembangkan alat yang dapat menangkap osilasi gelombang laut dan mengubahnya menjadi bentuk
9
energi lain menggunakan sistem buoyant yang dapat berosilasi ke atas dan ke bawah. Penelitian tentang sistem konversi energi gelombang laut ini terus dikembangkan hinga pada tahun 1898, seorang bernama P. Wright mematenkan karyanya yang diberi nama “Wave Motor”. Pada abad ke- 20, Skotlandia membuat instalasi sistem konversi energi gelombang laut atau pembangkit listrik tenaga gelombang laut dengan jenis Oscillating Water Column (OWC) di Islay tepatnya pada tahun 2000 dengan kapasitas daya sebesar 500 kW. Pada tahun 2008 Portugis telah mengembangkan sistem pembangkit listrik tenaga gelombang jenis pelamis yang kemudian juga dikembangkan di UK. Pelamis merupakan divais yang mengapung dengan segmen berbentuk silinder besi berlubang yang dihubungkan satu sama lain pada sambungan dua derajat kebebasan.
3.3 Gelombang Laut
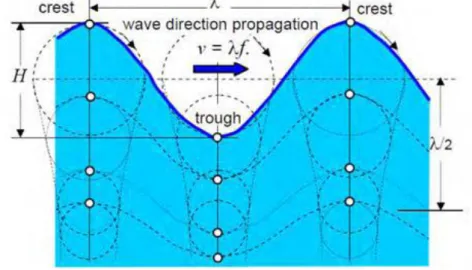
Gelombang laut terbentuk dari kombinasi gaya gravitasi, tegangan permukaan laut, dan adanya angin yang berhembus. Besar kecilnya gelombang ditentukan oleh kecepatan angin, jarak antara angin yang merangsang terbentuknya gelombang dengan gelombang itu sendiri (fetch), kedalaman, serta topografi dari dasar laut. Jika gelombang berada jauh dari angin yang merangsangnya maka bentuknya akan sebagaimana gelombang reguler dan disebut sebagai swell. Partikel partikel air yang terangsang oleh angin membentuk lintasan lingkaran pada masing - masing titik yang mempunyai diameter paling besar pada permukaannya. Semakin dalam letaknya, maka diameternya akan semakin berkurang secara eksponensial. Rangkaian dari gerakan melingkar tersebut nantinya akan membentuk gelombang laut dan perambatannya seperti terlihat pada gambar di bawah ini
Gambar 6. Wave direction
Jarak antara puncak ke puncak (crest to crest) didefinisikan sebagai panjang gelombang (λ). Ketinggian gelombang (H) sebanding dengan intensitas angin dan durasinya. Periode gelombang (T) adalah waktu yang dibutuhkan untuk mencapai panjang gelombang dan sebanding dengan kedalaman laut. Frekuensi gelombang (f) adalah banyaknya gelombang dalam satu detik. Rasio antara panjang gelombang
10
(λ) dibandingkan dengan dua kali ketinggian gelombang (2H) disebut declivity dan ketika nilainya lebih dari 1/7, maka gelombang akan menjadi tidak stabil dan menghilang.
3.4 Gelombang Reguler dan Irreguler
Gelombang regular adalah jenis gelombang dengan nilai amplitude gelombang konstan, periode tunggal dan mempunyai spectrum tunggal [12]. Teori gelombang regular ini merupakan sebuah pendekatan dari beberapa asumsi penyederhaan dan idealisasi. Asumsi dasar teori gelombangg regular diantaranya sebagai beriku; a. Fluida dianggap homogen.
b. Fluida dianggap ideal ( inviscid dan incompressible)
c. Tekanan di permukaan diabaikan serta dianggap konstan dan seragam. d. Gerakan partikel tidak saling bertubrukan selama bergerak.
e. Dasar laut dianggap datar sehingga kecepatan vertical di dasar adalah nol. Gelombang irregular adalah jenis gelombang superposisi dari beberapa gelombang regular yang mempunyai amplitude dan frekuensi berbeda. Akibatnya gelombang irregular memiliki bentuk dan arah gerakan yang tak beraturan.
3.5 Gerakan Benda Apung
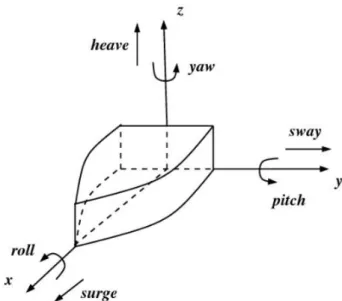
Pada dasarnya benda yang mengapung mempunyai 6 mode gerakan bebas (SDOF-six degree of freedom) yang terbagi menjadi dua kelompok, yaitu 3 mode gerakan translasional dan 3 mode gerakan rotasional. Berikut ini adalah keenam mode gerakan tersebut:
a. Mode Gerakan Translasional
Surge, gerakan transversal arah sumbu x
Sway, gerakan transversal arah sumbu y
Heave, gerakan transversal arah sumbu z
b. Mode Gerakan Rotasional
Roll, gerakan rotasional arah sumbu x
Pitch, gerakan rotasional arah sumbu y
11
Gambar 7. Six Degree of Freedom (SDOF) Gerakan Kapal
Definisi gerakan bangunan laut dalam enam derajat kebebasan seperti pada Gambar 7. Dengan memakai konversi sumbu tangan kanan, tiga gerakan translasi pada arah sumbu x, y, dan z adalah masing - masing surge, sway, dan heave sedangkan untuk gerakan rotasi terhadap ketiga sumbu adalah roll, pitch, dan yaw. Sehingga domain gerakan yang mempengaruhi kapal dan ponton adalah gerakan rotasi dan translasi.
3.6 Respon Amplitudo Operator
Response Amplitudo Operator (RAO) merupakan informasi yang membahas tentang karakteristik gerakan bangunan laut atau fungsi respon struktur akibat beban gelombang yang mengenai struktur lepas pantai pada frekuensi tertentu. RAO dapat dinyatakan dengan bentuk matematis yaitu (respon struktur / ζgelombang). Respon amplitudo bisa berupa gerakan, tegangan, maupun getaran. Respon gerakan RAO untuk gerakan translasi merupakan perbandingan langsung antara amplitudo gerakannya dibandingkan dengan amplitude gelombang insiden (keduanya dalam satuan panjang) dapat dinyatakan dalam persamaan di bawah ini:
RAO = ζk0 (m)
ζ0 (m) (2.1)
Sedangkan respon non-dimensi atau RAO untuk gerakan rotasi yaitu perbandingan antara gerakan rotasi struktur dengan kemiringan gelombang dalam (radian/ radian atau derajat/derajat) dapat dinyatakan dalam persamaan di bawah ini:
RAO = ζk0(0)
kwζ(0) (2.2)
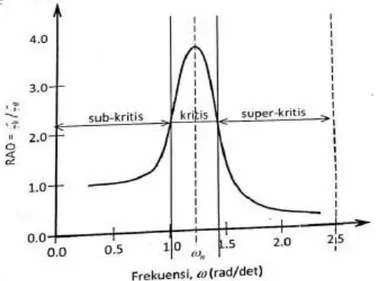
Kurva respons gerakan bangunan apung pada dasarnya dapat dibagi menjadi tiga bagian yaitu:
a. Pertama adalah bagian frekuensi rendah, atau gelombang (dengan periode) panjang, yang disebut daerah sub - kritis. Pada daerah ini bangunan laut akan
12
mengikuti pola atau kontur elevasi gelombang yang panjang, sehingga amplitudo gerakan kurang lebih akan ekivalen dengan amplitudo gelombang, atau disebut sebagai konturing.
b. Kedua adalah daerah kritis, meliputi pertengahan lengan kurva di sisi frekuensi rendah sampai dengan puncak kurva dan diteruskan ke pertengahan lengan kurva di sisi frekuensi tinggi. Puncak kurva berada pada frekuensi alami, yang merupakan daerah resonansi, sehingga respon gerakan mengalami magnifikasi, atau amplitudo gerakan akan beberapa kali lebih besar daripada amplitudo gelombang.
Gambar 8. Bentuk Umum Grafik Respon Gerakan Bangunan
c. Ketiga adalah gerakan super kritis, yaitu daerah frekuensi tinggi, atau gelombang- gelombang (dengan periode pendek). Pada daerah ini respon gerakan akan mengecil. Semakin tinggi frekuensi, atau semakin rapat antara puncak- puncak gelombang yang berurutan, maka akan memberikan efek seperti bangunan laut bergerak diatas air yang relatif datar. Oleh karena itu kondisi ini dapat diistilahkan sebagai platforming.
3.7 Teori Stabilitas
Sebuah benda dikatakan pada posisi keseimbangan stabil (stable equilibrium) apabila benda digeser ke suatu posisi baru, benda tersebut dapat kembali lagi ke posisi awal, dan kondisi ini disebut stabilitas positif terhadap acuan keseimbangan posisi awalnya. Namun apabila suatu benda setelah digerakkan ke suatu posisi baru benda tersebut terus bergerak semakin jauh dari posisi awalnya, maka kesetimbangan benda tersebut dikatakan berada pada kesetimbangan labil (unstable
equilibrium) dan kondisi ini dikategorikan sebagai stabilitas negatif terhadap acuan
13
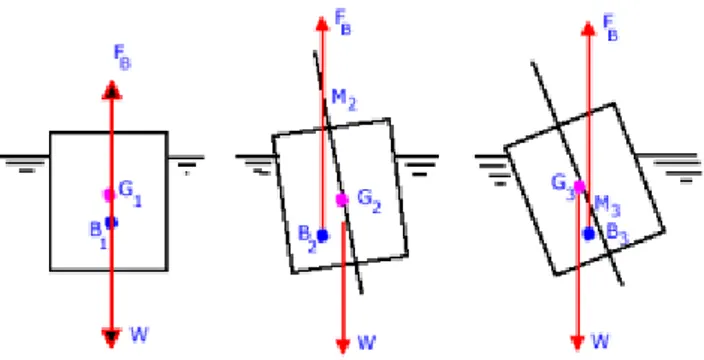
Gambar 9. Tiga Kondisi Kestabilan
Pada bangungan terapung akan terdapat 2 buah gaya vertikal yang bekerja, yakni gaya apung (buoyancy) yang mengarah ke atas dan berat dari bangunan itu sendiri yang mengarah ke bawah.
• Titik Berat (Centre of Gravity, G)
Titik Berat ialah titik tangkap dari semua gaya-gaya yang bekerja ke bawah. Letak titik G pada benda kosong ditentukan oleh hasil percobaan stabilitas. Perlu diperhatikan bahwa letak titik G tergantung daripada pembagian berat di benda. Jadi, selama tidak ada berat yang digeser/ditambah/dikurangi titik G tidak akan berubah walaupun benda oleng. Berat pendulum pada penelitian ini sangat kecil jadi dianggap tidak akan mempengeruhi titik gerak ponton.
Gambar 10. Contoh Titik Berat Sebuah Benda Terapung
• Titik Apung (Centre of Buoyancy, B)
Titik apung dikenal dengan titik B dari sebuah benda mengapung, merupakan titik tangkap dari resultan gaya-gaya yang menekan keatas dari bagian yang terbenam dalam air. Titik B bukanlah merupakan suatu titik yang tetap, akan tetapi akan berpindah-pindah oleh adanya perubahan sarat dari benda. Dalam stabilitas benda, titik B inilah yang menyebabkan suatu benda mampu untuk tegak kembali setelah mengalami senget (condong). Letak titik B tergantung dari besarnya senget benda (bila senget berubah maka letak titik B akan berpindah).
14
Gambar 11. Letak Titik Berat di Air
• Titik Metasentris (M)
Titik metasentris dari sebuah benda didefinisikan sebagai sebuah titik semu dari batas dimana titik G tidak boleh berada di atasnya agar benda tetap memiliki stabilitas yang positif (stabil). Meta artinya berubah-ubah, jadi titik ini dapat berubah letaknya mengikuti besarnya sudut senget. Apabila benda senget pada sudut kecil maka titik apung B bergerak di sepanjang busur dimana titik M merupakan titik pusatnya di bidang tengah benda
(centre of line) dan pada sudut senget yang kecil ini perpindahan letak titik
M masih sangat kecil, sehingga masih dikatakan tetap.
Gambar 12. Letak Titik Metacenter
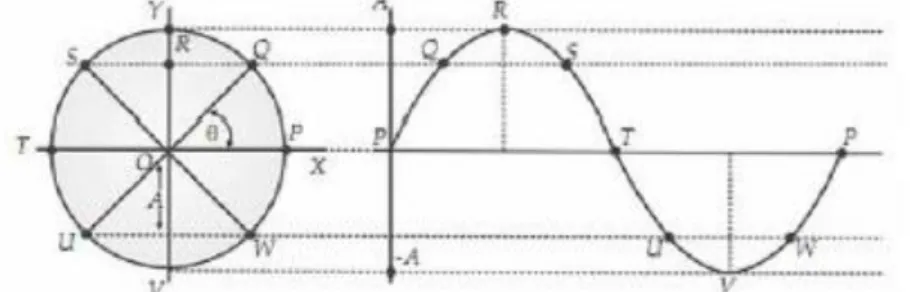
3.8 Gerak Harmonik Sederhana
Sebuah pendulum sederhana dapat dideskripsikan sebagai sebuah massa yang digantungkan pada tali ( massa tali diabaikan ) sehingga dapat bergerak bolak-balik. Gerakan bolak-balik inilah yang kemudian disebut sebagai gerak harmonik sederhana. Pendulum sederhana dapat didekati sebagai sebuah besi kecil berbentuk silinder dengan jari-jari yang kecil dan massa yang besar jika dibandingkan dengan panjang dan massa dari tali yang digunakan untuk menggantung besi silinder tersebut.
15
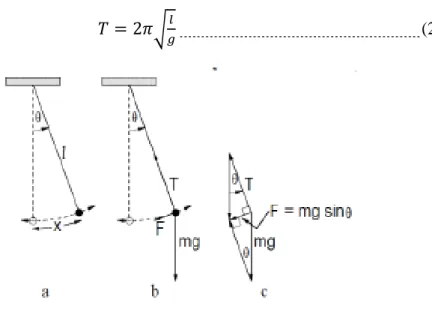
Sebuah pendulum apabila dipindahkan dari titik kesetimbangannya, akan ada gaya pemulih yang membuat pendulum kembali ke titik kesetimbangannya. Gaya pemulih ini besarnya setara dengan resultan dari berat pendulum dengan tegangan dari tali. Jika massa dari pendulum didefinisikan sebagai m dan tergntung pada tali sepanjang 𝑙 dan berpindah dengan sudut 𝜃 dan jarak x, maka gaya yang terjadi dapat dirumuskan dalam persamaan 2.3 di bawah ini:
𝐹 = 𝑚𝑔 𝑠𝑖𝑛 𝜃 (2.3)
Apabila sudut 𝜃bernilai kecil, maka sin 𝜃 akan sama dengan 𝜃 dan jika x/𝑙
disubtitusikan untuk 𝜃, maka akan di dapatkan persamaan 2.4 di bawah ini:
𝑇 = 2𝜋√𝑙
𝑔 (2.4)
Gambar 14. Gaya yang bekerja pada pendulum
Selain itu, parameter yang penting pada gerak harmonik sederhana adalah simpangannya. Simpangan getaran harmonik sederhana dapat dianggap sebagai proyeksi yang bergerak melingkar beraturan pada diameter lingkaran seperti ditunjukkan pada Gambar 13 yang menggambarkan sebuah partikel yang bergerak melingkar beraturan dengan kecepatan sudut 𝜔 dan jari – jari A. Anggap mula-mula partikel berada di titik P. Pada saat t = 0, partikel berada di titik P, setelah t sekon berada di Q. Besarnya sudut yang ditempuh adalah sebagaimana persamaan 2.5 dan 2.6 di bawah ini:
𝜃 = 𝜔𝑡 (2.5)
𝜃 =2𝜋𝑡
𝑇 (2.6)
Simpangan gerak harmonik sederhana merupakan proyeksi titik Q pada salah satu sumbu utamanya (sumbu Y). Jika A adalah amplitudo simpangan (m), T adalah periode (s), ω adalah kecepatan sudut (rad/s), t adalah waktu (s), dan simpangan itu dinyatakan dengan sumbu Y, maka:
16
𝑌 = 𝐴 sin 𝜃 (2.7)
𝑌 = 𝐴 sin2𝜋𝑡
𝑇 (2.8)
Besar sudut ( θ ) dalam fungsi sinus disebut sudut fase. Jika partikel mula-mula berada pada posisi sudut θo, maka persamaanya dapat dituliskan sebagaimana persamaan 2.9 sampai 2.11 berikut ini:
𝑌 = 𝐴 sin 𝜃 (2.9)
𝑌 = 𝐴 sin( 𝜔𝑡 + 𝜃0) (2.10)
𝑌 = 𝐴 sin (2𝜋𝑡
𝑇 + 𝜃0) (2.11)
Maka sudut fase getaran harmoniknya adalah sebagaimana persamaan di bawah ini.
𝜃 = 2𝜋𝑡
17
BAB IV
METODOLOGI PENELITIAN
Aspek yang menjadi dasar penelitian ponton pembangkit listrik tenaga gelombang laut (PLTGL) ini meliputi desain dan pengujian lapangan yang terbagi dalam jangka waktu penelitian tahun pertama dan kedua. Adapun tahapan penelitian dapat digambarkan sebagai berikut :
a. Tahun Pertama
18 b. Tahun Kedua
Gambar16 Diagram Alir Penelitian Tahun Kedua
1. Desain Ponton
Pada tahap ini dilakukan desain ponton PLTGL untuk mendapatkan ponton yang mampu menghasilkan RAO yang besar pada gelombang dengan amplituo rendah. Desain ponton yang dilakukan terdiri dari dua jenis ponton, yaitu ponton limas segi enam dan ponton katamaran. Ponton limas segi enam memiliki 4 pendulum berbentuk juring dan 3 cadik yang memanjang di sekitar lambung utama, seperti ditunjukkan pada Gambar 15. Sedangkan Ponton Katamaran memiliki pendulum yang memanjang yang terletak menggantung di antara 2 lambung ponton katamaran, seperti ditunjukkan pada Gambar 16. Sementara itu dimensi ponton ditunjukkan pada Tabel 1.
19 Tabel 1. Dimensi Ponton
Jenis Ponton Parameter Nilai (m)
Ponton Limas Segi 6
Tinggi 1.2 Lebar lingkaran/ponton utama 1.7 Panjang cadik 3 Ponton Katamaran Panjang lambung 5 Lebar lambung 1.1 Tinggi lambung 1
Jarak antar lambung 1
Gambar 17. Desain Ponton Segienam
20 2. Simulasi dan Analisa Hasil
Simulasi dilakukan dalam dua tahap. Tahap pertama dilakukan simulasi untuk menggunakan software Ansys Hidrodynamics Diffraction untuk mengetahui interaksi ponton terhadap gelombang. Simulasi meliputi performansi ponton ketika dikenai gelombang dengan variasi amplitudo dan periode gelombang serta nilai CoG (center of gravity). Karakteritik gelombang yang digunakan ini diambil dari tahap studi potensi yang dilakukan sebelumnya. Simulasi akan menghasilkan nilai RAO pada masing-masing variasi. Hasil simulasi tahap pertama ini akan digunakan di simulasi tahap kedua menggunakan Ansys Rigid Dynamic untuk mengetahui respon pendulum terhadap ponton. Respon pendulum yang akan dianalisa adalah simpangan serta periode Gerakan pendulum. Hasil simulasi kemudian dianalisa untuk mendapatkan desain ponton terbaik yang akan di fabrikasi
3. Fabrikasi PLTGL – Sistem Multi Pendulum
Pada tahun pertama akan dilakukan fabrikasi ponton dan sistem mekanik. Fabrikasi ponton dilakukan mengacu pada hasil sumulasi, dimana ponton yang memiliki RAO terbesar yang akan difabrikasi. Sistem mekanik terdiri dari sistem bandul dan sistem penunjang lain seperti gearbox dan lain-lain. Sementara itu pada tahun kedua dilanjutkan dengan integrasi sistem elektrik yang meliputi pemasangan generator, inverter kontroler dan komponen elektrik lainnya. Fabrikasi ini akan menghasilkan purwarupa yang siap untuk diujikan di lingkungan laut.
4. Pengujian Lapangan di Lingkungan Laut
Pengujian lapangan dilakukan saat fabrikasi selesai dan direncanakan untuk dilakukan di 2 tempat yang mewakili kondisi perairan di Indonesia. Dua tempat tersebut diambil dari dua lokasi terbaik dari survey 3 lokasi, yang direncana yaitu di Cilincing, Prigi, dan Banyuwangi. Berdasarkan data awal yang didapat, maka diketaui bahwa nilai amplitudo dan periode gelombang pada masing-masing site adalah sebagai berikut :
a. Prigi Amplitudo 1,4 m ; Periode 10 s b. Banyuwangi Amplitudo 0,3 m ; Periode 5 s c. Cilincing Amplitudo 0,2 m ; Periode 2 s 5. Studi Kelayakan Bisnis
Tahap selanjutnya adalah tahap studi kelayakan bisnis. Pada tahap ini, teknologi PLTGL – Sistem Bandul Multi Pendulum akan dikaji lebih lanjut dalam berbagai aspek, diantaranya aspek kelayakan pasar, teknis, kelayakan finansial dan kelayakan organisasi.
21
a. Kajian Kelayakan Pasar
PLTGL-SMP ini memiliki sasaran pasar untuk nelayan yang membutuhkan daya listrik, baik untuk penerangan maupun untuk menghidupkan lampu guna sebagai pemancing cumi-cumi seperti yang dilakukan nelayan cumi yang menggunakan lampu sebagai pengumpan.
Tahapan jangka panjang adalah memetakan daerah-daerah di Indonesia yang memiliki kesamaan kebutuhan tersebut.
b. Kajian Kelayakan Teknis
Kajian kelayakan teknis di sini akan melakukan survey dan investigasi terkait dengan:
• Daerah-daerah potensial untuk menggunaan teknologi PLTGL-SMP • Proses Produksi
• Proses Instalasi
• Proses Operasional, dan • Proses Pemeliharaan
c. Kajian Kelayakan Finansial
Kelayakan Finansial untuk pelaksanaan PLTG-SMP akan memperhitungkan biaya-biaya terkait biaya pre-project, biaya non teknis dan teknis, biaya produksi, instalasi dan pemeliharaan, sehingga hasil studi kelayakan finansial ini akan menjadi pedoman atau prosedur untuk investasi.
PLTGL-SMP ini memiliki keunggulan yaitu tidak merusak lingkungan dan memiliki kemudahan dalam produksi dan pemasangan. Secara jangka panjang PLTGL-SMP memiliki nilai lebih ekonomis dibanding penggunaan bahan bakar solar.
d. Kajian Kelayakan Orgaisasi
Pembuatan PLTGL-SMP ini dapat terlaksana atau di terapkan, karena adanya contribution share atau peran aktif para stake holder. Model organisasi bisnis disini akan terbagi dengan beberapa kelompok yaitu :
1. Kelompok Akademis (pengembangan teknologi dan royalty paten produk) 2. Kelompok Kontraktor (pabrik manufaktur) yang akan mendapat bimbingan
dalam memproduksi PLTGL-SMP dari ITS. Hal ini terkait pembuatan produk yang harus presisi seuai dengan desain serta cara instalasi komponen.
3. Kelompok Operator dan Pemelihara (Badan Usaha Daerah, Koperasi atau Kumpulan komunitas tertentu)
22
BAB V
ORGANISASI TIM, JADWAL DAN ANGGARAN BIAYA
5.1 Organisasi Tim Peneliti
Organisasi tim peneliti pada penelitian ini dapat dilihat pada Gambar xx berikut:
Adapun penjelasan kompetensi dan tanggung jawab dari peneliti adalah sebagai berikut :
Ketua Peneliti
Kompetensi : Ketua peneliti telah mempunyai rekam jejak penelitian yang cukup dalam tema yang diusulkan. Kompetensi yang dimiliki oleh ketua penelitia ini merupakan akumulasi dari Pendidikan dan penelitian yang telah dilakukan di bidang pembangkit listrik tenaga gelombang laut (PLTGL).
Tanggung Jawab
➢ Memberikan arahan penelitian terhadap anggota sesuai dengan bidang kompetensinya.
➢ Memastikan penelitian selesai tepat waktu dan tepat sasaran.
➢ Melakukan koordinasi dalam hal penyusunan laporan dan publikasi ilmiah terkait hasil penelitian.
Anggota I
Kompetensi : Anggota I memiliki kompetensi pada bidang sistem elektrikal
Tanggung Jawab
➢ Supervisi pembuatan diagram elektrikal
➢ Supervisi integrasi sistem elektikal
➢ Melakukan pendapingan pada seluruh proses tahapan penelitian Ketua Peneliti
Dr.Ridho Hantoro, ST, MT
Anggota I
Irfan Syarif Arief, S.T., M.T.
Anggota II
Erna Septyaningrum, S.T., M.T.
Anggota III
Ahmad Wildan Mahmashani Yusuf Rifqi Hudaya
23
Anggota II
Kompetensi : Anggota II memiliki keahlian pada bidang konversi energi
Tanggung Jawab
➢ Supervisi pembuatan desain ponton dan pendulum
➢ Merancang integrasi sistem mekanikal
➢ Melakukan koordinasi dalam hal penyusunan laporan dan publikasi ilmiah terkait hasil penelitian.
Anggota III
Kompetensi : Salah satu anggota III merupakan mahasiswa pascasarjana dengan bidang minat rekayasa energi terbarukan
Tanggung Jawab
➢ Melakukan desain gambar untuk proses fabrikasi
➢ Melakukan pengambilan data pada tahap eksperimental
➢ Membantu dalam penyusunan laporan
5.2 Jadwal Penelitian
Penelitian ini direncanakan untuk selesai dalam kurun waktu 2 tahun dengan rincian sebagai berikut:
Tabel 2. Jadwal Penelitian Tahun 1 (Pelaksanaan Tahun 2020), Fabrikasi Sistem Ponton dan Mekanik PLTGL
No. Kegiatan Bulan
1 2 3 4
1 Persiapan dan Koordinasi
2 Sizing spesifikasi untuk:
1. Sarat air
2. Massa pendulum minimum
3 Pembuatan Desain
1. Ponton berbentuk limas segi enam 2. Ponton berbentuk katamaran 3. Pendulum
4 Simulasi RAO ponton terhadap gelombang laut 5 Simulasi gerakan ponton terhadap simpangan pendulum
6 Analisis hasil simulasi
7 Persiapan Fabrikasi
8 Fabrikasi ponton dan pendulum
9 Publikasi Makalah Seminar International
24
Tabel 3. Jadwal Tahun 2 (Pelaksanaan Tahun 2021), Pengujian pada Lingkungan Laut
No. Kegiatan Bulan
1 2 3 4 5 6 7 8 1 Persiapan dan koordinasi tim 2 Integrasi Komponen Elektrik ke Sistem
3 Site test
4 Perbaikan desain: a. Evaluasi hasil site test
b. Perbaikan desain ponton dan pendulum
5 Studi Kelayakan Bisnis 6 Paten:
a. Pembuatan draft paten b. Pendaftaran paten
7 LRIP
8 Publikasi Jurnal International 9 Penyusunan laporan akhir
25
5.3 Anggaran Biaya
Berikut adalah persentase untuk anggaran dana untuk kegiatan pada tahun pertama, dengan rincian sebagai berikut :
Tabel 4. Rincian anggaran biaya (Pelaksanaan tahun 2020)
Item Bahan Volume Satuan Harga Satuan
(Rp)
Harga Total (Rp)
Ponton Katamaran 1 unit 30,000,000 30,000,000
Kerangka Ponton 1 unit 3,000,000 3,000,000
Kerangka Penyangga Pendulum 1 paket 4,000,000 4,000,000
Pendulum 2 unit 5,000,000 10,000,000 Mooring 1 unit 5,000,000 5,000,000 Bevel 1 paket 5,000,000 5,000,000 Gearbox 1 Paket 6,000,000 6,000,000 Shaft 1 unit 4,000,000 4,000,000 Pelaporan 4 paket 250,000 1,000,000 68,000,000 0
Akomodasi Rapat 20 paket 250,000 5,000,000
Perjalanan ke Seminar 2 paket 1,000,000 2,000,000
7,000,000
Pembantu Lapangan 5 orang/5 hari 400,000 2,000,000
Beasiswa Biaya Pendidikan Pascasarjana
untuk Pembantu Peneliti di ITS 1 Orang/Penelitian 20,000,000 20,000,000
22,000,000
Biaya Seminar 1 paket 3,000,000 3,000,000
3,000,000 100,000,000 4. Honorium Sub Total Total Keseluruhan 1. Bahan Habis Sub Total 2. Peralatan Penunjang Sub Total 3. Perjalanan Sub Total 5. Lain-lain Sub Total
26
Berikut adalah persentase untuk anggaran dana untuk kegiatan pada tahun Kedua :
Tabel 5. Rincian anggaran biaya (Pelaksanaan tahun 2021)
Item Bahan Volume Satuan Harga Satuan
(Rp)
Harga Total (Rp)
Wiring dan Control Panel 1 Paket 1,000,000 1,000,000
Generator 1Kw Low RPM 1 unit 10,000,000 10,000,000
Inverter 1 paket 11,000,000 11,000,000
Kontroler 1 paket 4,500,000 4,500,000
Baterai 1 Paket 5,000,000 5,000,000
Circuit Breaker 3 unit 500,000 1,500,000
Cat dan Anti Fouling 1 Paket 1,000,000 1,000,000
Kertas HVS, Spidol, Catridge, dll (ATK) 1 paket 1,000,000 1,000,000
Laporan dan dokumen 10 paket 500,000 5,000,000
40,000,000
Multimeter 3 buah 500,000 1,500,000
Torquemeter 1 buah 3,000,000 3,000,000
Clinometer 2 buah 2,500,000 5,000,000
9,500,000
Akomodasi Rapat 20 paket 250,000 5,000,000
Survei Pasar 1 paket 5,500,000 5,500,000
Perjalan survey lokasi pengujian 1 paket 3,000,000 3,000,000
Rental Truck 1 paket 3,000,000 3,000,000
Rental Kapal 1 paket 3,000,000 3,000,000
Akomodasi site test 1 paket 7,000,000 7,000,000
26,500,000
Pembantu Lapangan 10 orang/5 hari 400,000 4,000,000
Beasiswa Biaya Pendidikan Pascasarjana
untuk Pembantu Peneliti di ITS 1 Orang/Penelitian 20,000,000 20,000,000
24,000,000
Pendaftaran Paten 1 Paket 5,000,000 5,000,000
Pendaftaran Jurnal 1 paket 5,000,000 5,000,000
10,000,000 110,000,000 Sub Total 4. Honorium Total Keseluruhan 1. Bahan Habis Sub Total 2. Peralatan Penunjang Sub Total 3. Perjalanan 5. Lain-lain Sub Total Sub Total
27
BAB VI
DAFTAR PUSTAKA
[1] D. Nasional, Ketahanan Energi Indonesia 2017, 1st. ed 2017.
[2] I. R. H. Irfan.S.Arief, "Respon to Pontoon and Pendulum Motion at Wave Energy Converter Based on Pendulum System," E3S Web of Conferences
43,01022 (2018), 2017.
[3] J. K. a. G. Bhuyan, "Ocean Energy: Global Technology Development Status," Report prepared by Powertech Labs for the IEA-OES
(Implementing Agreement on Ocean Energy Systems - International Energy
Agency, 2009.
[4] S. Said, Energi Outlook Indonesia, vol. 11, Jakarta Selatan: Dewan Energi Nasional, 2014, p. 4.
[5] "An Overview of Ocean Energy Activities in 2018," Ocean Energy Systems
Annual Report, p. 67, 2018.
[6] H. Titah, "An Up-to-Date Technologies Review and Evaluation of Wave Energy Converters," International Review of Electrical Engineering , vol. 10, 2015.
[7] P. F. E. F.-M. a. H. S. J.P Kofoed, "Prototype Testing of the Wave Energy Converter Wave Dragon," Renew Energy, Vols. 181-189, p. 31, 2006. [8] A. d. O. F. D.V. Evan, "Hydrodynamic of Ocean Wave Energy Utilization,"
Springer, pp. 51-55, 1986.
[9] J. Falnes, "A Review of wave Energy Extraction," Science Direct Marine
Structure, vol. 20, pp. 185-201, 2007.
[10] W. Darmawan, "Pemodelan Sistem Gerak Pendulum pada Pembangkit Listrik Tenaga Gelombang Laut - Sistem Bandulan (SB)," Tugas Akhir, 2018.
[11] Y. Kholiq, "Simulasi Respon Gerak Multi Pendulum pada Ponton Trimaran Pembangkit Listrik Tenaga Gelombang Laut," Tugas Akhir, 2018.
[12] F. Fatnanta, "Kajian Perilaku Transmisi dan Stabilitas Pemecah Gelombang Kantong Pasir tipe Tenggelam," Disertasi, ITS Surabaya, 2009.
28
LAMPIRAN Biodata Tim Peneliti
1. Ketua
a. Nama Lengkap : Dr. Ridho Hantoro, ST., MT
b. NIP/NIDN : 19761223200501 1001/0023127602 c. Fungsional/Pangkat/Gol. : Lektor/III/d
d. Bidang Keahlian : Rekayasa Energi Terbarukan e. Departemen/Fakultas : Teknik Fisika/FTIRS
f. Alamat Rumah dan No. Telp. : Jl. Manyar Indah 8/16 Sukolilo Surabaya (08155015475)
g. Riwayat penelitian/pengabdian yang paling relevan : Penelitian yang relevan
No Tahun Judul Penelitian
1. 2019 Pengujian Lapangan (Site Test) Pembangkit Listrik Tenaga Hidrokinetik (PTHk) Skala Kecil Tipe Vertical Axis Darrieus Turbine dengan Inovasi Straight Blade Cascaded
2. 2019 Studi Pembangkitan Energi Melalui Pengolahan Sampah Kota (MSW) dengan Proses Hydrothermal Carbonization (HTC) dan Gasifikasi
3. 2019 Perancangan dan Implementasi Sistem Monitoring Real-Time Pembangkit Listrik Tenaga Surya (PLTS) di Departemen Teknik Fisika - ITS
4. 2018 Experimental Study of Counter-Rotating Turbine in Darrieus Straight-Blade Turbine Array Configuration
5. 2015 Analysis of Wake Profile Behind V-Blade Darrieus Ocean Current Turbine Profile Based on Computational Fluid Dynamics
Riwayat Pengabdian yang relevan
No Tahun Judul Penelitian
1. 2008 Integrated Microhydro Implementation and Development Program (IMIDAP) – UNDP oleh Kementerian ESDM.
2. 2007 Studi dan pengembangan pembangkit listrik tenaga mikrohidro (PLTMH) Kab. Lamandau – Kalimantan Tengah.
3. 2007 Studi dan pengembangan pembangkit listrik tenaga mikrohidro (PLTMH) SendiTrawas dan Wotlemah-Mojokerto.
29 h. Publikasi yang paling relevan :
No Tahun Judul Publikasi
1. 2019 Grid-connected and off-grid solar PV system design using long-term climatological data and techno-economic analysis for ecological conservation
2. 2018 Solar dryer and photovoltaic for fish commodities (Case study in fishery community at Kenjeran Surabaya)
i. Paten terakhir : -
j. Tugas Akhir, Tesis, dan Disertasi yang sudah selesai dibimbing. No Tahun Judul Tugas Akhir, Tesis dan Disertasi
1. 2018 Pemodelan Sistem Gerak Pendulum Pada Pembangkit Listrik Tenaga Gelombang Laut – Sistem Bandul (SB) 2. 2019 Simulasi Respon Gerak Multi Pendulum Pada Ponton
30 2. Anggota I
a. Nama Lengkap : Irfan Syarif Arief, ST., MT.
b. NIP/NIDN : 19691225199702 1001/0025126903
c. Fungsional/Pangkat/Gol. : Lektor/ d. Bidang Keahlian :
e. Departemen/Fakultas : Teknik Sistem Perkapalan/FTK
f. Alamat Rumah dan No. Telp. : Merak II/P-16 Perum REWWIN Waru- Sidoarjo (085330330383)
g. Riwayat penelitian/pengabdian yang paling relevan h. Publikasi yang paling relevan
i. Paten terakhir
31 3. Anggota II
a. Nama Lengkap : Erna Septyaningrum, ST., MT.
b. Jenis Kelamin : Perempuan
c. NPP : 1992201912073
d. Bidang Keahlian : Rekayasa Energi dan Pengkondisian Lingkungan
e. Fakultas / Departemen : Teknologi Industri dan Rekayasa Sistem / Teknik Fisika f. Alamat Rumah dan No. Telp : Kabongan Kidul RT/RW 01/04, Rembang, 59218,
Indonesia (085741493003) g. Riwayat Penelitian dan Pengabdian yang Relevan:
i. Penelitian yang relevan
No Tahun Judul Penelitian
1. 2019 Pengujian Lapangan (Site Test) Pembangkit Listrik Tenaga Hidrokinetik (PTHk) Skala Kecil Tipe Vertical Axis Darrieus Turbine dengan Inovasi Straight Blade Cascaded
2. 2019 Studi Pembangkitan Energi Melalui Pengolahan Sampah Kota (MSW) dengan Proses Hydrothermal Carbonization (HTC) dan Gasifikasi
3. 2019 Perancangan dan Implementasi Sistem Monitoring Real-Time Pembangkit Listrik Tenaga Surya (PLTS) di Departemen Teknik Fisika - ITS
4. 2018 Experimental Study of Counter-Rotating Turbine in Darrieus Straight-Blade Turbine Array Configuration
5. 2015 Analysis of Wake Profile Behind V-Blade Darrieus Ocean Current Turbine Profile Based on Computational Fluid Dynamics
ii. Riwayat pengabdian yang relevan: - iii. Publikasi yang relevan:
No Tahun Judul Publikasi
1 2020 Performance analysis of multi-row vertical axis hydrokinetic turbine–straight blade cascaded (VAHT-SBC) turbines array 2 2019 Analysis of wind energy potential and wind energy development to
evaluate performance of wind turbine installation in Bali, Indonesia 3 2018 Impact of Sizing in VAHT-SBC to the Channel Blockage
4 2018 “A Novel Design of Vertical Axis Hydrokinetic Turbine Straight-Blade Cascaded (VAHT-SBC): Experimental and Numerical Simulation”, Journal of Engineering and Technological Sciences 5 2017 “Performance Investigation of an Innovative Vertical Axis
Hydrokinetic Turbine – Straight Blade Cascaded (VAHT-SBC) for Low Current Speed”, ICOSMEE
32
SURAT PERNYATAAN KESEDIAAN ANGGOTA TIM PENELITIAN
Yang bertanda tangan di bawah ini kami:
Nama : Irfan Syarif Arief, ST., MT.
NIP : 19691225199702 1001
Departemen / Fakultas : Teknik Sistem Perkapalan/FTK
Menyatakan bersedia untuk melaksanakan tanggung jawab sebagai anggota tim penelitian:
Judul Penelitian : Pengembangan dan Pengujian Lapangan
(Site test) Pembangkit Listrik Tenaga
Gelombang Laut (PLTGL) - Sistem Multi Pendulum
Ketua Tim Peneliti : Dr. Ridho Hantoro, ST., MT.
dengan tugas : Supervisi pembuatan diagram elektrikal, supervisi integrasi sistem elektikal, melakukan pendapingan pada seluruh proses tahapan penelitian
33
SURAT PERNYATAAN KESEDIAAN ANGGOTA TIM PENELITIAN
Yang bertanda tangan di bawah ini kami:
Nama : Erna Septyaningrum, ST., MT.
NPP : 1992201912073
Departemen / Fakultas : Teknik Fisika / FTIRS
Menyatakan bersedia untuk melaksanakan tanggung jawab sebagai anggota tim penelitian:
Judul Penelitian : Pengembangan dan Pengujian Lapangan
(Site test) Pembangkit Listrik Tenaga
Gelombang Laut (PLTGL) - Sistem Multi Pendulum
Ketua Tim Peneliti : Dr. Ridho Hantoro, ST., MT.
dengan tugas : Supervisi pembuatan desain ponton dan pendulum, merancang integrasi sistem mekanikal, melakukan koordinasi dalam hal penyusunan laporan dan publikasi ilmiah terkait hasil penelitian.
34
SURAT PERNYATAAN KESEDIAAN ANGGOTA TIM PENELITIAN
Yang bertanda tangan di bawah ini kami:
Nama : Ahmad Wildan Mahmashani
NRP : -
Departemen / Fakultas : Teknik Fisika / FTIRS
Menyatakan bersedia untuk melaksanakan tanggung jawab sebagai anggota tim penelitian:
Judul Penelitian : Pengembangan dan Pengujian Lapangan
(Site test) Pembangkit Listrik Tenaga
Gelombang Laut (PLTGL) - Sistem Multi Pendulum
Ketua Tim Peneliti : Dr. Ridho Hantoro, ST., MT.
dengan tugas : Melakukan desain gambar untuk proses fabrikasi, melakukan pengambilan data pada tahap eksperimental, membantu dalam penyusunan laporan.
Surat pernyataan ini kami buat dengan sebenarnya untuk digunakan seperlunya.
35
SURAT PERNYATAAN KESEDIAAN ANGGOTA TIM PENELITIAN
Yang bertanda tangan di bawah ini kami:
Nama : Yusuf Rifqi Hudaya
NRP : 02311640000042
Departemen / Fakultas : Teknik Fisika / FTIRS
Menyatakan bersedia untuk melaksanakan tanggung jawab sebagai anggota tim penelitian:
Judul Penelitian : Pengembangan dan Pengujian Lapangan
(Site test) Pembangkit Listrik Tenaga
Gelombang Laut (PLTGL) - Sistem Multi Pendulum
Ketua Tim Peneliti : Dr. Ridho Hantoro, ST., MT.
dengan tugas : Melakukan desain gambar untuk proses fabrikasi, melakukan pengambilan data pada tahap eksperimental, membantu dalam penyusunan laporan.
36
SURAT PERNYATAAN KESEDIAAN ANGGOTA TIM PENELITIAN
Yang bertanda tangan di bawah ini kami:
Nama : Bariz Irfan Ridho
NPP : 02311640000147
Departemen / Fakultas : Teknik Fisika / FTIRS
Menyatakan bersedia untuk melaksanakan tanggung jawab sebagai anggota tim penelitian:
Judul Penelitian : Pengembangan dan Pengujian Lapangan
(Site test) Pembangkit Listrik Tenaga
Gelombang Laut (PLTGL) - Sistem Multi Pendulum
Ketua Tim Peneliti : Dr. Ridho Hantoro, ST., MT.
dengan tugas : Melakukan desain gambar untuk proses fabrikasi, melakukan pengambilan data pada tahap eksperimental, membantu dalam penyusunan laporan.
![Gambar 4 Konsep desain PLTGL [6].](https://thumb-ap.123doks.com/thumbv2/123dok/4086551.2796551/13.892.199.707.130.444/gambar-konsep-desain-pltgl.webp)