Lampiran 1
Tensor dan Operasinya
Skalar,Vektor dan Tensor
Misalkan terdapat N buah besaran Aµ dalam sistem koordinat {xµ} dan N
buah besaran A′µ dalam sistem koordinat lain {x′µ} dengan µ= 1,2,3..., N. Jikan kedua besaran itu memenuhi hubungan
A′µ =
N
X
ν=1
∂x′µ ∂xν A
ν (1)
maka Aν disebut sebagai komponen vektor kontravarian atau vektor
kontra-varian saja. jika (µν = 0,1,2,3) maka dapat digunakan sumasi Einstein untuk menyederhanakan persamaan tersebut menjadi
A′µ= ∂x′
µ
∂xν A ν
(2) Misalkan terdapat N buah besaran Aµ dalam sistem koordinat {xµ} dan N
buah besaran {A′
µ} dalam sistem koordinat lain {x′ µ
} dengan µ = 0,1,2,3. Jikan kedua besaran itu memenuhi hubungan
A′
µ=
∂x′ν
∂xµAν (3)
maka Aν disebut sebagai vektor kovarian.
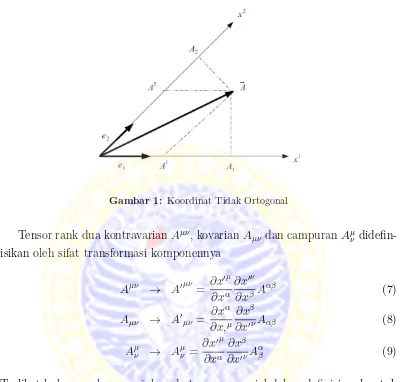
Perbedaan antara vektor kovarian dan kontravarian diberikan oleh Gam-bar(1). dari gambar tampak bahwa
A=Aµeµ (4)
dan
Aµ=A·eµ (5)
maka untuk koordinat kartesian berlaku
Aµ=Aµ (6)
sis-tem koordinat ortoghonal Cartesian.[Purwanto, 2009]
Gambar 1: Koordinat Tidak Ortogonal
Tensor rank dua kontravarianAµν, kovarianA
µν dan campuranAµν
didefin-isikan oleh sifat transformasi komponennya
Aµν → A′µν = ∂x′
µ
∂xα
∂x′ν ∂xβA
αβ
(7) Aµν → A′µν =
∂xα
∂x,µ
∂xβ
∂x′νAαβ (8)
Aµν → A µ ν =
∂x′µ ∂xα
∂xβ
∂x′νA
α
β (9)
Terlihat bahwa rank menunjuk pada turunan parsial dalam definisi, nol untuk skalar, satu untuk vektor dan dua untuk tensor rank kedua. [Purwanto, 2009]
Operasi Tensor
Operasi yang berlaku pada tensor antara lain
1. Penjumlahan dan Pengurangan
2. Perkalian Luar
Perkalian luar dua buah tensor menghasilkan sebuah tensor yang ranknya sama dengan jumlah rank dari kedua buah tensor yang dioperasikan. Perkalian luar dari tensorAm
n danBij akan memberikan tensorCnijm =AmnBij yang merupakan
tensor campuran rank empat.
3. Kontraksi
Kontraksi adalah operasi menyamakan sepasang atau lebih indeks kontravarian dan kovarian sehingga hasil yang diperoleh adalah penjumlahan yang sesuai dengan kaidah penjumlahan Einstein. Hasil penjumlahan ini adalah suatu tensor yang ranknya dua lebih rendah daripada rank tensor semula. Misalkan diketahui tensor campuran rank empat Al
mnp. Dengan mengambill =m maka
akan diperoleh tensor kovarian rank kedua Anp.
4. Perkalian Dalam
Perkalian dalam merupakan operasi perkalian luar yang diikuti oleh operasi kontraksi. Misalkan diketahui tensor-tensorAmn
l danBks, hasil perkalian kedua
tensor ini dinyatakan oleh Cmns
lk = Amnl Bks. Dengan mengambil l = s maka
akan diperoleh hasil perkalian dalam yang dinyatakan sebagaiCmn
k =Amns Bks.
5. Hukum Hasil Bagi
Lampiran 2
Tensor Simetri dan Antisimetri
Tensor kovarian rank dua Aµν disebut tensor simetri jika komponennya
memenuhi
Aµν =Aνµ (10)
dan disebut antisimetri jika
Aµν =−Aνµ (11)
analog dengan persamaan tersebut, tensor kontravarian Aµν disebut simetri
jika
Aµν =Aνµ (12)
dan disebut anti simetri jika [Dalarson, 2005] Aµν =
Lampiran 3
Turunan Kovarian
Turunan kovarian suatu tensor kontravarian Aµν diberikan oleh
DAµν
Dxβ =
∂Aµν
∂xβ + Γ ν αβA
µα+ Γµ αβA
αν (14)
atau bisa ditulis
DβAµν =∂βAµν+ ΓναβA µα
+ ΓµαβAαν (15) dan
Aµν;β =Aµν,β + ΓναβA µα
+ ΓµαβAαν (16)
dan turunan kovarian untukAµν
Aµν;β =Aµν,β−Γµβα Aαν −ΓανβAµβ (17)
sedangkan turunan kovarian untuk tensor campuran Aµ ν
Aµν;β =Aµν,β+ ΓµαβAβ ν −Γ
β νβA
µ
Lampiran 4
Analisis Vektor
Hukum Aljabar Vektor
Jika A, B dan C adalah vektor dan m,n adalah skalar serta θ adalah sudut yang dibentuk oleh Adan B, maka
(1) A+B=B+A
(2) A+ (B+C) = (A+B) +A
(3) (m+n)A=mA+nA
(4) m(A+B) = mA+mB
(5) A·B =ABcosθ (6) A×B=ABsinθ (7) A·B=B·A
(8) A×B=−B×A (19)
Gradien, Divergensi dan Curl
Operator vektor ∇ yang disefinisikan sebagai berikut
∇=i ∂
∂x +j ∂ ∂y +k
∂
∂z (20)
Kemudian jikaφ(x, y, z) danA(x, y, z) mempunyai turunan pertama yang kon-tinu pada suatu daerah, maka dapat didefinisikan hal berikut
∇φ = ∂φ ∂xi+
∂φ ∂yj+
∂φ
∂zk (21)
∇ ·A= ∂A1 ∂x +
∂A2
∂y + ∂A3
∂z (22)
∇ ×A =
∂A3
∂y − ∂A2
∂z
i+
∂A1
∂z − ∂A3
∂x
j
dengan∇φ adalah gradien dari φ, ∇ ·Aadalah Divergensi dariAdan ∇ ×A
adalah Curl dari A.
Rumus-Rumus yang Mengandung
∇
Jika turunan parsial dari A,B,U dan V ada maka:
∇(U +V) = ∇U +∇V
∇ ·(A+B) = ∇ ·A+∇ ·B
∇ ×(A+B) = ∇ ×A+∇ ×B
∇ ·(UA) = (∇U)·A+U(∇ ·A)
∇ ×(UA) = (∇U)×A+U(∇ ×A)
∇ ·(A×B) = B·(∇ ×A)−A·(∇ ×B)
∇ ·(∇U) = ∇2U ≡ ∂
2U
∂x2 +
∂2U
∂y2 +
∂2U
∂z2
∇ ×(∇U) = 0
∇ ×(∇ ×A) = ∇(∇ ·A)− ∇2A (24)
Lampiran 5
Solusi Schwarzchild
Didekat obyek masifM ruang-waktu yang melengkung, garis duniadsdari par-tikel dan berkas cahaya adalah geodesik, untuk mendapatkannya perlu dike-tahui tensor metrik gµν di dalam koordinat yang dipilih. dalam koordinat
bola
x0 =t, x1 =r, x2 =θ, x3 =φ
dengan M sebagai titik pusatnya. jika M nol maka rumus jarak
ds2 =−c2dt2+dr2+ (r2dθ2+r2sin2θdφ2) (25) Jika massa M dinyalakan maka akan terjadi dua hal, ruang posisi akan me-lengkung sehingga lingkaran r tidak secara tepat berada pada jarak r dari pusat lingkaran, dan jam pada setiap permukaan r tidak teramati dari per-mukaan r yang lain. Efek ini dapat dituliskan dalam elemen jarak
ds2 =−e2νc2dt2+e2λdr2+ (r2dθ2+r2sin2θdφ2) (26)
dengan ν=ν(r), λ=λ(r).
Persamaan 26 memberi elemen tensor metrik
g00=−e2ν, g11 =e2λ, g22 =r2, g33 =r2sin2θ (27)
atau dapat ditulis
gµν =
−e2ν 0 0 0
0 e2λ 0 0
0 0 r2 0
0 0 0 r2sin2θ
inversnya
Selanjutnya untuk semua komponen simbol Cristoffelnya akan berlaku
Γ0,22 =
1
2(∂2g02+∂2g20−∂0g22) = 0
Γ0,23= Γ0,32 =
1
2(∂3g02+∂2g03−∂0g23) = 0
Γ0,33 =
1
2(∂3g03+∂3g30−∂0g33) = 0
Γ1,00 =
1
2(∂0g10+∂0g01−∂1g00) = 1
2
0 + 0− ∂(−e
2ν)
∂r
= ν′e2ν
Γ1,01= Γ1,10 =
1
2(∂1g10+∂0g11−∂1g01) = 0
Γ1,02= Γ1,20 =
1
2(∂2g10+∂0g21−∂1g02) = 0
Γ1,03= Γ1,30 =
1
2(∂3g10+∂0g31−∂1g03) = 0
Γ1,11 =
1
2(∂1g11+∂1g11−∂1g11) = 1
2 2λ ′e2λ = λ′e2λ
Γ1,12= Γ1,21 =
1
2(∂2g11+∂1g21−∂1g12) = 0
Γ1,13= Γ1,31 =
1
Γ1,22 =
1
2(∂2g12+∂2g21−∂1g22) = 1
2(0 + 0−(2r)) = −r
Γ1,23= Γ1,32 =
1
2(∂3g12+∂2g31−∂1g23) = 0
Γ1,33 =
1
2(∂3g13+∂3g31−∂1g33) = 1
2 0 + 0− 2rsin
2θ = −rsin2θ
Γ2,00 =
1
2(∂0g20+∂0g02−∂2g00) = 1
2(0 + 0−0) = 0
Γ2,01= Γ2,10 =
1
2(∂1g20+∂0g12−∂2g01) = 0
Γ2,02= Γ2,20 =
1
2(∂2g20+∂0g22−∂2g02) = 1
2(0 + 0−0) = 0
Γ2,12= Γ2,21 =
1
2(∂2g21+∂1g22−∂2g12) = 1
2(0 + (2r)−0) = r
Γ2,13= Γ2,31 =
1
2(∂3g21+∂1g32−∂2g13) = 0
Γ2,22= Γ2,21 =
1
2(∂2g22+∂2g22−∂2g22) = 1
2(0) = 0 Γ2,23= Γ2,32 =
1
Γ2,33 =
1
2(∂3g23+∂3g32−∂2g33) = 1
2 0 + 0− r
2.sinθ.cosθ = −r2.sinθ.cosθ
Γ3,00 =
1
2(∂0g30+∂0g03−∂3g00) = 0
Γ3,01= Γ3,10 =
1
2(∂1g30+∂0g13−∂3g01) = 0
Γ3,02= Γ3,20 =
1
2(∂2g30+∂0g23−∂3g02) = 0
Γ3,03= Γ3,30 =
1
2(∂3g30+∂0g33−∂3g03) = 0
Γ3,11 =
1
2(∂1g31+∂1g13−∂3g11) = 0
Γ3,12= Γ3,21 =
1
2(∂2g31+∂1g23−∂3g12) = 0
Γ3,13= Γ3,31 =
1
2(∂3g31+∂1g33−∂3g13) = 1
2 0 + 2rsin
2θ
−0 = rsin2θ
Γ3,22 =
1
2(∂2g32+∂2g23−∂3g22) = 0
Γ3,23= Γ3,32 =
1
2(∂3g32+∂2g33−∂3g23) = 1
2 0 + r
2.sinθcosθ
−0 = r2sinθcosθ
Γ3,33 =
1
2(∂3g33+∂3g33−∂3g33) = 0
Γµυρ =g µτ
Γ000 = g00Γ0,00
= 0 Γ001 = Γ010 = g0τΓτ,01
= g00Γ0,01=−e(−2ν). −ν′e(2ν)
=ν′ = g01Γ1,01= 0
= g02Γ2,01= 0
= g03Γ3,01= 0
Γ002 = Γ020 = g0τΓτ,20
= g00Γ0,20
= 0 Γ003 = Γ030 = g0τΓτ,30
= g00Γ0,30
= 0 Γ011 = g0τΓ
τ,11
= g00Γ0,11
= 0 Γ012 = Γ021 = g0τΓ
τ,12
= g00Γ0,12
= 0 Γ013 = Γ031 = g0τΓ
τ,13
= g00Γ0,13
= 0 Γ022 = g0τΓ
τ,22
= g00Γ0,22
= 0 Γ023 = Γ032 = g0τΓ
τ,23
= g00Γ0,23
= 0 Γ033 = g0τΓτ,33
= g00Γ0,33
Γ100 = g1τΓ τ,00
= g11Γ1,00
= e(−2λ). ν′e(2ν) = ν′e(2ν−2λ)
Γ101 = Γ110 = g1τΓτ,01
= g11Γ1,01
= 0 Γ102 = Γ120 = g1τΓτ,02
= g11Γ1,02
= 0 Γ103 = Γ130 = g1τΓτ,03
= g11Γ1,03
= 0 Γ111 = g1τΓ
τ,11
= g11Γ1,11
= e(−2λ). λ′e(2λ) = λ′
Γ112 = Γ121 = g1τΓ τ,12
= g11Γ1,12
= 0 Γ113 = Γ131 = g1τΓτ,13
= g11Γ1,13
= 0 Γ122 = g1τΓτ,22
= g11Γ1,22
= e(−2λ).(
−r) = −re(−2λ)
Γ123 = Γ132 = g1τΓ τ,23
= g11Γ1,23
Γ133 = g1τΓ τ,33
= g11Γ1,33
= e(−2λ).
−rsin2θ = −rsin2θe(−2λ)
Γ200 = g1τΓτ,00
= g22Γ2,00
= 0 Γ201 = Γ210 = g2τΓτ,01
= g22Γ2,01
= 0 Γ202 = Γ220 = g2τΓτ,02
= g22Γ2,02
= 0 Γ203 = Γ230 = g2τΓ
τ,03
= g22Γ2,03
= 0 Γ211 = g22Γ2,11
= 0 Γ212 = Γ221 = g2τΓτ,12
= g22Γ2,12
= (r)−2.(r) = 1
r Γ213 = Γ231 = g22Γ2,13
= 0 Γ222 = Γ222 = g22Γ2,22
= 0 Γ223 = Γ232 = g22Γ2,23
= 0 Γ233 = Γ233 = g22Γ2,33
= (r)−2.
−r2sinθcosθ = −sinθcosθ
Γ3
00 = g33Γ3,00
Γ301 = Γ310 = g33Γ3,01
= 0 Γ302 = Γ320 = g33Γ3,02
= 0 Γ303 = Γ310 = g33Γ3,03
= 0 Γ311 = g33Γ3,11
= 0 Γ312 = Γ321 = g33Γ3,12
= 0 Γ313 = Γ331 = g33Γ3,13
= r−2sin−2θ. rsin2θ = 1
r Γ3
23 = Γ332 = g33Γ3,23
= r−2sin−2θ. r2sinθ.cosθ = sinθ
cosθ = cotθ Γ3
33 = g33Γ3,33
= 0 Tensor Riccinya
Rτ υ =∂υΓγτ γ−∂γΓ γ τ υ+ Γ
ρ τ γΓ
γ ρυ −Γ
ρ τ υΓ
γ
ργ (31)
maka untuk komponen Ricci diagonalnya Rτ τ = ∂τΓγτ γ−∂γΓ
γ τ τ+ Γ
ρ τ γΓ
γ ρτ −Γ
ρ τ τΓ
R20 =R02 = ∂0Γγ2γ−∂γΓγ02+ Γ
ρ
0γΓ γ ρ2−Γ
ρ
02Γγργ
= ∂0Γγ2γ− ∂0Γ002+∂1Γ102+∂2Γ202+∂3Γ302
+ Γρ00Γ0ρ2+ Γ
ρ
01Γ1ρ2+ Γ
ρ
02Γ2ρ2+ Γ
ρ
03Γ3ρ2
− Γ002Γγ0γ+ Γ102Γγ1γ+ Γ202Γγ2γ+ Γ302Γγ3γ = Γ000Γ002+ Γ100Γ120 + Γ200Γ022+ Γ300Γ032
+ Γ001Γ102+ Γ101Γ112+ Γ201Γ122+ Γ301Γ132 + Γ002Γ202+ Γ102Γ212+ Γ202Γ222+ Γ302Γ232 + Γ003Γ302+ Γ103Γ312+ Γ203Γ322+ Γ303Γ332 = 0
R30 =R03 = ∂0Γγ3γ−∂γΓγ03+ Γ
ρ
0γΓ γ ρ3−Γ
ρ
03Γγργ
= ∂0Γγ3γ− ∂0Γ003+∂1Γ103+∂2Γ203+∂3Γ303
+ Γρ00Γ0ρ3+ Γρ01Γ1ρ3+ Γρ02Γ2ρ3+ Γρ03Γ3ρ3
− Γ003Γ
γ
0γ+ Γ103Γ
γ
1γ+ Γ203Γ
γ
2γ+ Γ303Γ
γ
3γ
R23=R32 = ∂2Γγ3γ−∂γΓγ23+ Γ
ρ
2γΓ γ ρ3−Γ
ρ
23Γγργ
= ∂2Γ030+∂2Γ131+∂2Γ232+∂2Γ333
− ∂0Γ023+∂1Γ123+∂2Γ223+∂3Γ323
+ Γ02γΓγ03+ Γ12γΓγ13+ Γ22γΓγ23+ Γ32γΓγ33
− Γ023Γ
γ
0γ+ Γ123Γ
γ
1γ+ Γ223Γ
γ
2γ+ Γ323Γ
γ
3γ
= Γ020Γ003+ Γ021Γ103+ Γ022Γ203+ Γ023Γ303 + Γ120Γ013+ Γ121Γ113+ Γ122Γ213+ Γ123Γ313 + Γ220Γ023+ Γ221Γ123+ Γ222Γ223+ Γ223Γ323 + Γ320Γ033+ Γ321Γ133+ Γ322Γ233+ Γ323Γ333
−Γ323 Γ030+ Γ131+ Γ232+ Γ333 = 0
R23 =R32= 0
Rab =Rba ≡0,dengan a, b= 1,2,3
Pada medan gravitasi yang vakum, Rτ υ = 0. Maka persamaan (8) dan (9)
menjadi
−ν′′+ν′λ′−ν′2
− 2rν′ = 0 (34)
ν′′−ν′λ′+ν′2
− 2rλ′ = 0 (35)
(1 +rν′ −rλ′)e(−2λ) = 1 (36)
dengan menjumlahkan (10) dan (11)
−2 r (ν
′+λ′) = 0 atau
(ν′+λ′) = 0
dengan memasukkan (13) ke (12)
(1 + 2rν′)e(2ν) = d
dr
re(2ν) = 1 dengan mengintegralkan persamaan sebelumnya
Z d
re(2ν) =
Z dr
re(2ν)=r−2m (38)
2m merupakan konstanta integrasi → radius gravitasi g00 = −e(2ν)
= −
1− 2m r
(39) g11 = e(2λ)
= e(−2ν)
=
1− 2m r
−1
(40)
g00=η00+h00
1− 2GM
c2r = 1 +
2 c2Φ
Φ =−GM r 2m= 2GM
c2 (41)
Persamaan (2) menjadi
ds2 = −
1− 2m r
c2(dt)2+
1− 2m r
−1
(dr)2+r2
(dθ)2 +sin2θ(dϕ)2
Lampiran 6
Metrik Kerr
Bentuk Edington dari Solusi Schwarzchild
Solusi Schwarzchild diubah menjadi bentuk Edington dengan memakai trans-formasi koordinat waktu baru
¯
x0 =x0+ 2mln
r−2m 2m
(42)
maka akan didapatkan bentuk elemen garis baru
ds2 =−(d¯x)2+ (dr)2+r2(dθ2+sin2θdϕ2) + 2m r (d¯x
2+dr)2 (43)
bentuk Edington ini bila diubah ke koordinat kartesian
ds2 =−(dx¯0)2+ (dx)2 +2m r
d¯x0+ x·dx r
(44)
(dx)2 =dx2+dy2+dz2, r = (x·x) = (x2+y2+z2) bentuk metrik dari persamaan tersebut
gµν =ηµν+ 2mℓµℓν, ℓµ =
1
√
r
1,x r
(45)
dimana ηµν adalah matrik Minkowski
ηµν =
−1 0 0 0 0 1 0 0 0 0 1 0 0 0 0 1
Bentuk-Bentuk Metrik dari
gµν
=
ηµν
+ 2mℓµℓν
, dengan
ℓµℓν
η
µν= 0
Dengan mendefinisikan
ℓµ =ηµνℓν (46)
maka invers dari gµν adalah
gµν =ηµν −2mℓµℓν (47) ini bisa dibuktikan sebagai berikut
ℓµℓ
jika kita menuliskan ulangℓµ menulisnya
gµν =ηµν+α2mℓµℓν, gµν =ηµν −α2mℓµℓν, (56)
= 1 2α{(ℓ
σℓ
µ),σν + (ℓσℓν),σµ−ηστ(ℓµℓν),στ}
+1 2α
2
{(ℓσℓτ)
,σ(ℓνℓµ),τ +ℓµℓτ(ℓνℓσ),στ −12(ℓσℓ
τ,µ+ℓτℓσ,µ)(ℓ τℓ
σ,ν+ℓσℓτ,ν) −12(ℓσℓ
τ,µ+ℓτℓσ,µ)(ℓ τℓ
ν,σ+ℓνℓτ,σ)
+1 2η
τ λ(ℓσℓ
τ,µ +ℓτℓσ,µ)(ℓσℓν,λ+ℓνℓσ,λ) −12(ℓσℓ
µ,τ +ℓµℓσ,τ)(ℓτℓσ,ν +ℓσℓτ,ν) −12(ℓσℓ
µ,τ +ℓµℓσ,τ)(ℓτℓν,σ +ℓνℓτ,σ)
+1 2η
τ λ(ℓσℓ
µ,τ +ℓµℓσ,τ)(ℓσℓν,λ+ℓνℓσ,λ)
+1 2η
σρ(ℓτℓ
σ,ν +ℓσℓτ,ν)(ℓτℓµ,ρ+ℓµℓτ,ρ)
+1 2η
σρ(ℓ
τℓµ,ρ+ℓµℓτ,ρ)(ℓτℓν,σ+ℓνℓτ,σ) −12ησρητ σ(ℓτℓµ,ρ+ℓµℓτ,ρ)(ℓσℓν,λ+ℓνℓσ,λ)} −14α3{ℓτℓλ(ℓτℓσ,µ+ℓ
σ
ℓτ,µ)(ℓσℓν,λ+ℓνℓσ,λ)
+ℓτℓλ(ℓσℓµ,τ +ℓµℓσ,τ)(ℓσℓν,λ+ℓνℓσ,λ) −ησρℓτℓλ(ℓ
τℓµ,ρ+ℓµℓτ,ρ)(ℓσℓν,λ+ℓνℓσ,λ)
+ℓσℓρ(ℓτℓµ,ρ+ℓµℓτ,ρ)(ℓτℓσ,ν+ℓσℓτ,ν)
+ℓσℓρ(ℓ
τℓµ,ρ+ℓµℓτ,ρ)(ℓτℓν,σ+ℓνℓτ,σ) −ητ λℓσℓρ(ℓ
τℓµ,ρ+ℓµℓτ,ρ)(ℓσℓν,λ+ℓνℓσ,λ)} −12α4{ℓσℓρℓτℓλ(ℓ
= 1
Pada ruang waktu kosong, Rµν = 0, dan selama α adalah konstanta
sem-barang maka setiap suku dari ketiga sukuαharuslah bernilai nol. Jikaℓµ6= 0,
maka suku ketiga memberikan
a2 = 0,
(60) dimana
aµ = ℓνℓµ,ν (61)
akan didapatkan juga~a·~l= 0,maka dapat dituliskan untuk sebuah operator skalar A
lalu untuk aµ
aµ = gµνa ν
= ηµνℓβℓν,β
= ℓβℓµ
,β. (63)
Bila didefinisikan B =ℓµ
,µ, maka suku pertama
ηστ(ℓ
µℓν),στ = (ℓσℓµ),σν + (ℓσℓν),σµ
= (ℓσ,σℓµ+ℓσℓµ,σ),ν+ (ℓσ,σℓν+ℓσℓν,σ),µ
= (Bℓµ+Aℓµ),ν + (Bℓν+Aℓν),µ
(ℓµℓν) = [(A+B)ℓµ],ν + [(A+B)ℓν],µ (64)
dimana
≡ηµν ∂
2
∂xµ∂xν (Persamaan D’Alembert) (65)
kemudian dengan mengkontraksikan persamaan (64) denagn ηµν dan
mem-baginya dengan 2
ηµν (ℓµℓν) = ηµν{(Bℓµ+Aℓµ),ν+ (Bℓν+Aℓν),µ}
(ℓνℓ
ν) = [(A+B)ℓν],ν+ [(A+B)ℓµ],µ
0 = 2[(A+B)ℓµ],µ
0 = [(A+B)ℓµ]
,µ (66)
lalu untuk bagian suku keduanya akan bernilai nol jika pada suku pertama dan ketiga berlaku
(ℓσℓτ)
,σ(ℓµℓν),τ = (ℓσ,σℓ
τ +ℓσℓτ
,σ)(ℓµ,τℓν +ℓµℓν,τ)
= (Bℓτ +Aℓτ)(ℓ
µ,τℓν +ℓµℓν,τ)
= (A+B)(Aℓµℓν +Aℓµℓν)
ℓσℓτ(ℓ
µℓν),στ = ℓσℓτ(ℓµℓν,στ +ℓνℓµ,στ +ℓµ,σℓν,τ +ℓµ,τℓν,σ)
= ℓσℓ
µℓτℓν,στ +ℓνℓσℓτℓµ,στ +ℓσℓµ,σℓτℓν,τ
+ℓτℓµ,τℓσℓν,σ
= ℓσ[ℓτ(ℓ
µℓν),τ],σ−ℓσℓτ,σ(ℓµℓν),τ
+ℓσ[ℓτ(ℓνℓµ),τ],σ−ℓσℓτ,σ(ℓνℓµ),τ
+ℓσℓ
µ,σℓτℓν,τ +ℓτℓµ,τℓσℓν,σ
= ℓσ[A(ℓ
µℓν)],σ−Aℓτ(ℓµℓν),τ
+ℓσ[A(ℓνℓµ)],σ−Aℓτ(ℓνℓµ),τ + 2A2(ℓµℓν)
= ℓσA
,σℓµℓν +ℓσA(ℓµℓν),σ−Aℓτ(ℓµℓν),τ
ℓσA
,σℓνℓµ+ℓσA(ℓνℓµ),σ−Aℓτ(ℓνℓµ),τ
+2A2(ℓµℓν)
= ℓσA
,σℓµℓν +A2(ℓµℓν)−A2(ℓµℓν)
+ℓσA,σℓνℓµ+A2(ℓµℓν)−A2(ℓµℓν)
+2A2(ℓµℓν)
= 2(ℓσA
,σ+A2)ℓµℓν (68)
(ℓσℓµ),τ(ℓτℓν),σ = (ℓµℓσ,τ +ℓ σ
ℓµ,τ)(ℓνℓτ,σ+ℓ τ
ℓν,σ)
= ℓµℓσ,τℓνℓτ,σ+ℓµℓσ,τℓ τℓ
ν,σ
+ℓσℓ
µ,τℓνℓτ,σ+ℓ σℓ
µ,τℓτℓν,σ
= ℓµℓν[(ℓσ,τℓ τ
),σ−ℓσ,τ σℓ τ
] + 3A2ℓµℓν
= ℓµℓν[(Aℓσ),σ−B,τℓτ + 3A2] (69)
kembali mengambil persamaan (64)
(ℓµℓν) = [(A+B)ℓµ],ν+ [(A+B)ℓν],µ
ℓµ ℓν +ℓν ℓµ+ 2ηστℓµ,σℓν,τ = ℓµ(A+B),ν+ℓν(A+B),µ
+(A+B)(ℓµ,ν +ℓν,µ)
dengan ℓν akan didapat
ℓµ ℓ
µ = ℓµ(A+B),µ+A(A+B)
= [ℓµ(A+B)],µ−B(A+B) +A(A+B)
= −B(A+B) +A(A+B)
= A2−B2 (70)
tapi
0 = (ℓµℓν)
= ℓµ ℓ
µ+ℓµ ℓµ+ηστℓµ,σℓµ,τ
+ηστℓµ ,τℓµ,σ
= 2(ℓµ ℓµ+ηστℓµ,τℓµ,σ)
= 2(A2−B2+ηστℓµ ,τℓµ,σ)
B2−A2 = ηστℓµ
,τℓµ,σ (71)
maka
ητ σℓσ,τℓµℓσ,λℓν = ℓµℓν(B2−A2) (72)
dengan menghapus faktor α2/2 dari suku α2 akan didapat
= 2A(A+B)ℓµℓν+ 2(ℓσA,σ+A2)ℓµℓν −12ℓµℓν[(Aℓσ),σ−B,τℓτ + 3A2] +
1
2ℓµℓν(B
2
−A2) +1
2ℓνℓµ(B
2
−A2)2A(A+B)ℓµℓν+ 2(ℓσA,σ+A2)ℓµℓν −12Aℓτℓνℓτ.µ+
1 2Aℓσℓ
σ ,µℓν −
1 2Aℓ
σ
ℓµℓσ,ν −12ℓµℓν[(Aℓσ),σ−B,τℓτ + 3A2]
+1
2ℓµℓν(B
2−A2) + 1
2Aℓτℓ
τ ,νℓµ+
1
2ℓνℓµ(B
2−A2)
−1
2ℓµℓν[(Aℓ
σ)
,σ−B,τℓτ + 3A2] −1
2ℓµℓν[(Aℓ
σ)
= 2A(A+B)ℓµℓν + 2(ℓσA,σ+A2)ℓµℓν −12ℓµℓν[(Aℓσ),σ−B,τℓτ + 3A2] +
1
2ℓµℓν(B
2
−A2) +1
2ℓνℓµ(B
2
−A2)−1
2ℓµℓν[(Aℓ
σ
),σ−B,τℓτ + 3A2]
= 2A(A+B) + 2(ℓσA,σ+A2)−
1 2[(Aℓ
σ
),σ−B,τℓτ+ 3A2]
+1 2(B
2
−A2) + 1 2(B
2
−A2)− 1 2[(Aℓ
σ
),σ−B,τℓτ+ 3A2]
= 2A(A+B) + 2(ℓσA
,σ+A2)−(Aℓσ),σ+B,σℓσ−3A2
+B2−A2
= 2A2 + 2AB+ 2ℓσA,σ+ 2A2−(Aℓσ),σ+B,σℓσ −4A2 +B2
= 2ℓσA
,σ−(Aℓσ),σ+ 2AB+B2+B,σℓσ
= 2ℓσA,σ−(Aℓσ),σ+ 2A,σℓσ +Bℓσ,σ+B,σℓσ
= 2(Aℓσ)
,σ−(Aℓσ),σ+ (Bℓσ),σ
= (Aℓσ)
,σ+ (Bℓσ),σ
0 = [(A+B)ℓσ],σ (73)
Seperti halnya pernyataan diawal. selanjutnya kita set α = 1.
Keadaan Stasioner
Sekarang diasumsikan ℓµ takbergantung terhadap koordinat x0. Dapat
dit-ulis ℓµ = ℓ(1, λ1, λ2, λ3), dengan ℓµ adalah null λj adalah vektor-tiga, maka
persamaan
(ℓµℓν) = [(A+B)ℓµ],ν+ [(A+B)ℓν],µ
dapat dibentuk ulang
∇2(ℓ0ℓ0) = [(A+B)ℓ0],0+ [(A+B)ℓ0],0
∇2(ℓ2) = 0 (74)
∇2(ℓ2λi) = [(A+B)ℓ0],0+ [(A+B)ℓ0],i
= [(A+B)ℓ],i (75)
∇2(ℓ2λ
persamaan-persamaan tersebut akan memberikan
∇2ℓ2λi = (ℓ2λi),kk
= (ℓ2,kλi+ℓ2λi,k),k
= ℓ2,kkλi+ℓ2,kλi,k +ℓ2λi,kk +λi,kℓ2,k
ℓ2λi,kk+ 2(ℓ2),kλi,k = [(A+B)ℓ],i
∇2(ℓ2λiλj) = (ℓ2λiλj),kk
= (ℓ2λi,kλj +ℓ2λj,kλi+ℓ2kλiλj),k
= ℓ2
,kλi,kλj +ℓ2λi,kkλj +ℓ2λi,kλj,k
+ℓ2,kλj,kλi+ℓ2λj,kkλi+ℓ2λj,kλi,k
+ℓ2,kkλiλj+ℓ2,kλi,kλj +ℓ2,kλiλj,k
[(A+B)ℓλi],j+ [(A+B)ℓλj],i = ℓ2λi,kkλj+ℓ2λiλj,kk
+2ℓ2λi,kλj,k+ 2ℓ2,kλi,kλj
+2ℓ2,kλiλj,k
0 = ℓ2λi,kkλj +ℓ2λiλj,kk + 2ℓ2λi,kλj,k+ 2ℓ2,kλi,kλj
+2ℓ2,kλiλj,k −[(A+B)ℓλi],j−[(A+B)ℓλj],i
= ℓ2λ
i,kkλj +ℓ2λiλj,kk + 2ℓ2λi,kλj,k+ 2ℓ2,kλi,kλj
+2ℓ2,kλiλj,k −[(A+B)ℓ],jλi−[(A+B)ℓ],iλi,j −[(A+B)ℓ]iλj−[(A+B)ℓ]λj,i
= ℓ2λi,kkλj +ℓ2λiλj,kk + 2ℓ2λi,kλj,k+ 2ℓ2,kλi,kλj
+2ℓ2,kλiλj,k −[(A+B)ℓ],jλi−[(A+B)ℓ],iλi,j −(A+B)ℓ(λi,j+λj,i)
= 2ℓ2λi,kλj,k−(A+B)ℓ(λi,jλj,i)
2ℓ2λi,kλj,k = (A+B)ℓ(λi,jλj,i)
atau bisa ditulis
λi,kλj,k =
(A+B)
jika kita definisikan
(A+B)
2ℓ = p (78)
λi,k = M
maka persamaan (77) bisa ditulis
M+MT − 1
pM M
T = 0. (79)
denagn λ2 = 1, maka
(λjλj),i = λj,iλj +λjλj,i
= 2λjλj,i
λjλj,i =
1
2(λjλj),i = 0
MTλ = 0 (80)
disini λ berada dalam ruang null dari MT. Bila pada persamaan (61) µ= 0
maka
Aℓµ = ℓνℓµ,ν
Aℓ = ℓnuℓ,ν
= ℓλiℓ,i
Aℓλi = ℓν(ℓλi),ν
= ℓλjℓ,jλi+ℓλjℓi,j
= Aℓλi+ℓ2λjλi,j
ℓ2λjλi,j = 0
λjλi,j = 0
maka λjuga berada dalam ruang null dariM. Dengan memakai suatu matrik orthogonal baru R yang bila dioperasikan pada λ akan menghasilkan
Rλ = λ′ (82)
bentuk M′ haruslah
M′ =
Selama matrik tersebut tidak berubah terhadap perotasian, maka bentuk metrik N′ dan M′ juga memenuhi bentuk persamaan (79)
N′+N′T
atau
I− N ′ p =
cosθ −sinθ
−sinθ −cosθ
untuk sembarang θ. Dengan memilih kemungkinan pertama akan didapat
N′ =p
1−cosθ sinθ
−sinθ 1−cosθ
(89)
maka kita dapatkan untuk nilai M′
M′ =p
0 0 0
0 1−cosθ sinθ 0 −sinθ 1−cosθ
(90)
Kemudian untuk mengembalikan kebentuk M dapat kita pakai M = RTM′R
Mik = RilTMlj′ Rjk
Mik = RliMlj′Rjk
= R2iM22′ R2k+R2iM23′ R3k+R3iM32′ R2k+R3iM33′ R3k
= p(1−cosθ)R2iR2k+psinθR2iR3k−psinθR3iR2k
+p(1−cosθ)R3iR3k
= p(1−cosθ)(R2iR2k+R3iR3k)
+psinθ(R2iR3k−R3iR2k) (91)
Karena R adalah matrik rotasi orthogonal kolom dan baris, maka matrik R akan memenuhi
R1iR1k+R2iR2k+R3iR3k =δik
R2iR3k−R3iR2k=ǫiklR1l
jika R1i ≡Ri maka persamaan (A.46) akan menjadi
dengan kembali melihat bentuk λ′ maka akan kita dapatkan
R·λ= 1 (93)
dimana R disini menunjukkan vektor R1i = Ri. Disini akan didapat bahwa
Ri =λi. Maka akan kita dapatkan bentuk
Mik =λi,k = p(1−cosθ)(δik−λiλk) +psinθǫiklλl
= α(δik−λiλk) +βǫiklλl (94)
dengan
α=p(1−cosθ), β=psinθ.
Dengan memakai i=k pada persamaan (94) dan menjumlahkannya λ1,1+λ2,2+λ3,3 = α(δ11−λ1λ1+δ22−λ2λ2+δ33−λ3λ3)
= α(3−1)
∇ ·λ = 2α. (95)
Dengan mengalikan persamaan (A.49) dengan ǫjki lalu menjumlakannya di i
dan k
ǫ312λ2,1+ǫ321λ1,2+ǫ213λ3,1+ǫ231λ1,3+ǫ123λ3,2+ǫ132λ2,3
=−α{ǫ312λ2λ1+ǫ321λ1λ2+ǫ213λ3λ1+ǫ231λ1λ3+ǫ123λ3λ2
+ǫ132λ2λ3}+β{ǫ312ǫ213λ3+ǫ321ǫ123λ3+ǫ213ǫ321λ2
+ǫ231ǫ132λ2+ǫ123ǫ321λ1 +ǫ132ǫ231λ1}
λ2,1−λ1,2−λ3,1 +λ1,3+λ3,2−λ2,3
=−α{λ1λ2 −λ2λ1−λ3λ1+λ1λ3+λ3λ2−λ2λ3}
−β2{λ1+λ2+λ3}
Laplasian dari λ dapat diperoleh dengan dua cara. Pertama dengan menu-runkan persamaan (94) terhadap xk
λi,kk = [α(δik−λiλk)],k+ (βǫiklλl),k
= α,k(δik−λiλk)−αλi,kλk−αλiλk,k+ǫikl(βλl),k
= α,kδik−α,kλiλk−α[α(δik−λiλk) +βǫiklλl]λk −αλ∇ ·λ+ǫiklβ,kλl+ǫiklβλl,k
= ∇α−λ(∇α·λ)−α(2αλ−2αλ)−2α2λ
+∇β×λ+β∇ ×λ
= ∇α−λ(∇α·λ)−2α2λ+∇β×λ+ (−2βλ)
∇2λ = ∇α−λ(∇α·λ)−2(α2+β2)λ+∇β×λ (97) Dan cara kedua dengan identitas vektor
∇ ×(∇ ×λ) = ∇(∇ ·λ)− ∇2λ −2∇ ×(βλ) = 2∇λ− ∇2λ
∇2λ = 2λα+ 2∇ ×(βλ)
= 2λα+ 2∇β×λ+ 2β∇ ×λ
= 2λα−2λ× ∇β+ 2β(−2βλ)
= 2λα−2λ× ∇β−4β2λ (98) dengan menjumlahkan persamaan (97) dengan persamaan (98) akan didapat
∇α = λ× ∇β−λ(λ· ∇α)−2(α2−β2)λ (99) dari bentuk tersebut akan didapat
∇α = λ× ∇β−λ(β2−α2)−2(α2−β2)λ
= λ× ∇β−λ(α2−β2)
dengan
∇α·λ = (λ× ∇β)·λ−(λ· ∇α)−2(α2−β2) = −(λ· ∇α)−2(α2−β2)
2∇α·λ = −2(α2−β2)
∇α·λ = β2−α2 (101)
(∇β×λ)·λ = (β,2λ3−β,3λ2 +β,3λ1−β,1λ3+β,1λ2−β,2λ1)·λ
= β,2λ3λ1−β,3λ2λ1+β,3λ1λ1−β,1λ3λ1
+β,1λ2λ1−β,2λ1λ1
= 0 (102)
dari persamaan (96), divergensi dari βλadalah nol, maka
∇ ·βλ = β(∇ ·λ) +∇β·λ ∇ ·
−∇ ×2 λ
= β(∇ ·λ) +∇β·λ
0 = β(∇ ·λ) +∇β·λ ∇β·λ = −β(∇ ·λ)
= −2αβ (103)
mengalikan silang λ dengan persamaan (100) akan menghasilkan
λ× ∇α = λ×(β2−α2)λ−λ×(∇β×λ)
= −λ×(∇β×λ) = λ×(λ× ∇β) = λ(λ· ∇β)−λ2∇β
∇β = λ(λ· ∇β) + (∇α×λ)
dengan memakai simbol baru γ ≡α+iβ:
∇γ·λ = ∇ ·(∇α+i∇β) = λ· ∇α+iλ· ∇β = β2−α2−2iαβ
= −γ2 (105)
∇γ = ∇α+i∇β
= (β2−α2)λ+λ× ∇β−2iαβλ−i(λ× ∇α) = (β2−α2 −2iαβ)λ+λ×(∇β−i∇α)
= −γ2λ−i(λ× ∇γ) (106)
dan akan didapat,
∇ ·(∇γ) = −∇ ·(γ2λ)− ∇ ·(iλ× ∇γ)
∇2γ = −2γ(∇γ·λ)−γ2(∇ ·λ)
−i{∇γ·(∇ ×λ) +λ·(∇ × ∇γ)} = −2γ(∇γ·λ)−γ2(∇ ·λ)
−i{∇γ·(∇ ×λ)}
= −2γ(−γ2)−γ(2α)−2iβγ2 = 2γ2(γ−α−iβ)
= 0 (107)
(∇γ)2 = [−γ2λ−i(λ× ∇γ)]2
= γ4+ 2iγλ·(λ× ∇γ)−(λ× ∇γ)2
= γ4−(λ× ∇γ)2
= γ4− {(∇γ)2−(λ· ∇γ)2} = γ4− {(∇γ)2−γ4}
jika kita definisikan konstanta baru ω= 1/γ, maka
∇ω = −∇γ
γ2
= γ
2λ+iλ× ∇γ
γ2
= γ2λ+iλ× ∇γ
γ2
= γ2λ+iλ× ∇ω (109)
λ· ∇ω = λ· −∇γ
γ2
= 1 (110)
(∇ω)2 = (∇γ)
2
γ4
= 1 (111)
∇ω× ∇ω∗ = (λ−iλ× ∇ω)×(λ+iλ× ∇ω∗)
= λ×λ+λ×(iλ× ∇ω∗) +λ×(iλ× ∇ω) +(λ× ∇ω)×
= iλ×(∇ω·λ)−iλ2∇ω+iλ×(∇ω∗ ·λ)
−iλ2∇ω∗+λ×λ+ (λ× ∇ω)×(λ× ∇ω∗) = −i∇ω−i∇ω∗+Hλ
= −i(∇ω+∇ω∗) +Hλ (112) dengan H adalah representasi dari semua fungsi yang berhubungan dengan λ. Untuk menyelesaikan persamaan tersebut, persamaan tersebut dilakukan perkalian titik dengan ∇ω
∇ω·(∇ω× ∇ω∗) = i∇ω·(∇ω+∇ω∗) +∇ω·Hλ
0 = −i(1 +∇ω· ∇ω∗) +H
sehingga akan diadaptkan
∇ω× ∇ω∗ = −i(∇ω+∇ω∗) +i(1 +∇ω· ∇ω∗)λ
i∇ω× ∇ω∗ = (∇ω+∇ω∗)−(1 +∇ω· ∇ω∗)λ
(1 +∇ω· ∇ω∗)λ = −i∇ω× ∇ω∗+(∇ω+∇ω∗)
λ = ∇ω+∇ω∗ −i∇ω× ∇ω∗
1 +∇ω· ∇ω∗ (114)
Persamaan tersebut dapat memberikan ℓ hanya dalam fungsi γ. Karena ℓ haruslah memenuhi pers.(74),(75), maka ℓ2 = α. Persamaan (107)
menun-jukkan bahwaα harmonik sehingga pers.(74) haruslah lenyap. Untuk menun-jukkan bahwa ℓ2 =α adalah solusi dari pers.(75), maka
∇2(αλj) = (αλj)kk
= (α,kλj+αλj,k),k
= αkkλj +α,kλj,k+α,kλj,k+αλj,kk
= ∇2αλj+ 2α,kλj,k +α∇2λj
= α∇2λj+ 2α,kλj,k (115)
dengan memakai pers.(94),(98),(100),dan (104) akan didapat
∇2(αλj) = 2α∇α+ 2α(∇β×λ)−4αβ2λ
+2α,k(α(δjk −λjλk) +βεjklλl)
= 2α∇α+ 2α(∇β×λ)−4αβ2λ+ 2α∇α
−2α(∇β×λ) + 2β(∇α×λ) = 4α∇α−4αβ2λ+ 2β(∇α×λ) = 4α∇α−4αβ2λ+ 2β(−2αβλ+∇β) = 2α∇α+ 2β∇β
= ∇(α2+β2) (116)
dari definisi α dan β akan didapat
α2+β2 = (p[1−cosθ])2 + (psinθ)2
= p2−2p2cosθ+p2cos2θ+p2sin2θ = 2p2(1−cosθ)
dari definisi pers.(78) akan didapat
A+B = ℓ α(α
2+β2) (118)
lalu jika ℓ2 =α, sisi kanan pers.(75) menjadi
[(A+B)ℓ],j = (α2+β2),j. (119)
Persamaan t sesuai dengan pers.(116), maka terbukti bahwa ℓ2 =α.
Pada kasus ini
γ = p 1
(x+ia)2 (120)
atau untuk ω
ω =p(x+ia)2 (121)
dengan memisahkan bagian real dan imajinernya
ω=ρ+iσ, ω2 =ρ2−σ2+ 2iρσ=x2−a2+ 2ia·x
dengan
r =√x2, a=√a2
maka
ρ2−σ2 =r2−a2, ρσ=a·x,
ρ2+σ2 = ρ2+ (a·x)2
ρ2
= ρ
4+ (a·x)2
Dengan memilih a= (0,0, a) dan x= (x, y, z). Lalu
Metrik tersebut adalah metrik Kerr. Metrik tersebut akan kembali menjadi metrik Schwarzschild dalam bentuk Edington jika a= 0.
dx2+dy2 = |d(x+iy)|2
= |d[(ρ+ia)eiφsinθ] |2
= |eiφsinθdρ+ (ρ+ia)eiφcosθdθ+i(ρ+ia)eiφsinθdφ|2 = |sinθcosφdρ+ρcosθcosφdθ−acosθsinφdθ
−ρsinθsinφdφ−acosφsinθdφ+i(sinθsinφdρ +ρsinφcosθdθ+acosφcosθdθ+ρcosφsinθdφ
−asinφsinθdφ)|2
= (sinθcosφdρ+ρcosθcosφdθ−acosθsinφdθ
−ρsinθsinφdφ−acosφsinθdφ)2 + (sinθsinφdρ +ρsinφcosθdθ+acosφcosθdθ+ρcosφsinθdφ)2 = sin2θdρ2+ 2ρsinθcosθdρdθ−2asin2θdρdφ
+ρ2cos2θdθ2−2aρsinθcosθdθdφ+a2cos2θdθ2 +2aρsinθcosθdθdφ+ρ2sin2dφ2+a2sin2θdφ2
dx2 = dz2+dx2+dy2
= cos2θdρ2 +ρ2sin2θdθ2 −2ρsinθcosθdρdρ + sin2θdρ2+ 2ρsinθcosθdρdθ−2asin2θdρdφ
+ρ2cos2θdθ2+a2cos2θdθ2+ρ2sin2dφ2+a2sin2θdφ2 = (cos2θ+ sin2θ)dρ2+ρ2(sin2θ+ cos2θ)dθ2
+a2cos2θdθ2−2asin2θdρdφ+ρ2sin2θdφ2 +a2sin2θdφ2
= dρ2+ (ρ2+a2cos2θ)dθ2+ (ρ2+a2) sin2θdφ2
−2asin2θdρdφ.
d|x+iy|2 = d(x2+y2) = 2(xdx+ydy)
xdx+ydy = 1
2d|x+iy|
2
= 1 2d[(ρ
2+a2) sin2θ]
xdy−ydx = ℑ[(x−iy)d(x+iy)]
= ℑ{(ρ−ia)e−iφsinθ[eiφsinθdρ+ (ρ+ia)eiφcosθdθ
+i(ρ+ia)eiφsinθdφ]}
= ℑ[(ρ−ia) sin2θdρ+ (ρ2+a2) sinθcosθdθ+i(ρ2+a2) sin2θdφ] = −asin2θdρ+ (ρ2+a2) sin2θdφ
maka elemen garis pers.(128) dapat menjadi
ds2 = −d(x0)2+ρ2+ (ρ2+a2cos2θ)dθ2+ (ρ2+a2) sin2θdφ2
−2asin2θdρdφ+ 2mρ ρ2+a2cos2θ
dx0+ ρ ρ2+a2
(ρsin2θdρ+ sinθ(ρ2+a2) cosθdθ) + a ρ2+a2
(−asin2θdρ+ (ρ2+a2) sin2θdφ) +cos2θdρ
−ρsinθcosθdθ 2
= −d(x0)2+ρ2+ (ρ2+a2cos2θ)dθ2+ (ρ2+a2) sin2θdφ2
−2asin2θdρdφ+ 2mρ ρ2+a2cos2θ
dx0+ ρ
2
ρ2+a2 sin 2θdρ
+ρsinθcosθdθ− a
2
ρ2+a2 sin
2θdρ+asin2θdφ
+asin2θdφ+ cos2θdρ−ρsinθcosθdθ
2
= −d(x0)2+ +ρ2+ (ρ2+a2cos2θ)dθ2+ (ρ2+a2) sin2θdφ2
−2asin2θdρdφ+ 2mρ ρ2+a2cos2θ
dx0+asin2θdφ
+ρ
2+a2cos2θ
ρ2+a2 dρ+asin 2θdφ
2
(130)
dengan mengenalkan suatu bentuk variabel baru
x0 =x0′+ Z
2mρ
ρ2+a2−2mρdρ,
φ =φ′+ Z
2a ρ2+a2 −
a ρ2+a2−2mρ