32
BAB IV
HASIL PENGUJIAN DAN ANALISA
1.1. Pengujian Accelerometer dan Low Pass Filter
Pengujian ini dilakukan dengan mengganti nilai koefisien low pass filter, dari pergantian nilai tersebut akan terlihat perbedaannya. Hasil pengujian tersebut ditunjukan
pada Gambar 4.1, Gambar 4.2 dan Gambar 4.3.
70 75 80 85 90 95 100 105 110
1 3 5 7 9 11 13 15 17 19 21 23 25 27 29 31 33 35 37 39 41 43 45 47 49 51 53 55 57 59
Sudut VS Waktu Sampling (a=0.95)
sudut sudut +LPF
Gambar 4.1. Grafik Pengujian Accelerometer Dengan Koefisien Filter a=0.95.
Gambar 4.2. Grafik Pengujian Accelerometer Dengan Koefisien Filter a=0.93.
70 75 80 85 90 95 100 105 110
1 3 5 7 9 11 13 15 17 19 21 23 25 27 29 31 33 35 37 39 41 43 45 47 49 51 53 55 57 59
Sudut VS Waktu Sampling (a=0.93)
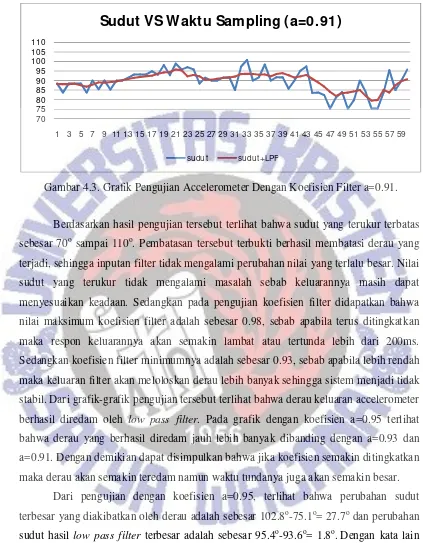
Berdasarkan hasil pengujian tersebut terlihat bahwa sudut yang terukur terbatas
sebesar 70o sampai 110o. Pembatasan tersebut terbukti berhasil membatasi derau yang
terjadi, sehingga inputan filter tidak mengalami perubahan nilai yang terlalu besar. Nilai
sudut yang terukur tidak mengalami masalah sebab keluarannya masih dapat
menyesuaikan keadaan. Sedangkan pada pengujian koefisien filter didapatkan bahwa
nilai maksimum koefisien filter adalah sebesar 0.98, sebab apabila terus ditingkatkan
maka respon keluarannya akan semakin lambat atau tertunda lebih dari 200ms.
Sedangkan koefisien filter minimumnya adalah sebesar 0.93, sebab apabila lebih rendah
maka keluaran filter akan meloloskan derau lebih banyak sehingga sistem menjadi tidak
stabil. Dari grafik-grafik pengujian tersebut terlihat bahwa derau keluaran accelerometer
berhasil diredam oleh low pass filter. Pada grafik dengan koefisien a=0.95 terlihat bahwa derau yang berhasil diredam jauh lebih banyak dibanding dengan a=0.93 dan
a=0.91. Dengan demikian dapat disimpulkan bahwa jika koefisien semakin ditingkatkan
maka derau akan semakin teredam namun waktu tundanya juga akan semakin besar.
Dari pengujian dengan koefisien a=0.95, terlihat bahwa perubahan sudut
terbesar yang diakibatkan oleh derau adalah sebesar 102.8o-75.1o= 27.7o dan perubahan
sudut hasil low pass filter terbesar adalah sebesar 95.4o-93.6o= 1.8o.Dengan kata lain peredaman yang terjadi adalah sebesar (1-(1.8/27.7))x100%= 93.5%.Sedangkan pada
koefisien a= 0.93 terjadi peredaman sebesar 89.4% dan pada koefisien a= 0.91 sebesar
84.9%. Sehingga dapat dikatakan bahwa koefisien a=0.95 lebih cocok digunakan sebab
70 75 80 85 90 95 100 105 110
1 3 5 7 9 11 13 15 17 19 21 23 25 27 29 31 33 35 37 39 41 43 45 47 49 51 53 55 57 59
Sudut VS W aktu Sampling (a=0.91)
sudut sudut +LPF
34
1.2. Pengujian Gyroscope dan Respon Sistem
Berdasarkan persamaan pada bagian elektrik sensor gyroscope, nilai yang
dihasilkan oleh sensor ini merupakan nilai kecepatan sudut dalam satuan dps. Dimana
hasil pengujian sensor ini dapat dilihat pada Gambar 4.4, serta Gambar 4.5.
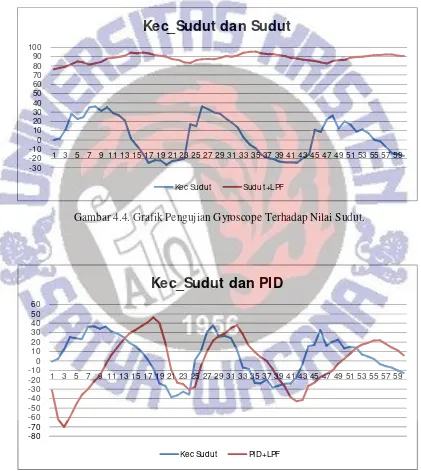
Gambar 4.4. Grafik Pengujian Gyroscope Terhadap Nilai Sudut.
-30 -20 -10 0 10 20 30 40 50 60 70 80 90 100
1 3 5 7 9 11 13 15 17 19 21 23 25 27 29 31 33 35 37 39 41 43 45 47 49 51 53 55 57 59
Kec_Sudut dan Sudut
Kec Sudut Sudut +LPF
-80 -70 -60 -50 -40 -30 -20 -10 0 10 20 30 40 50 60
1 3 5 7 9 11 13 15 17 19 21 23 25 27 29 31 33 35 37 39 41 43 45 47 49 51 53 55 57 59
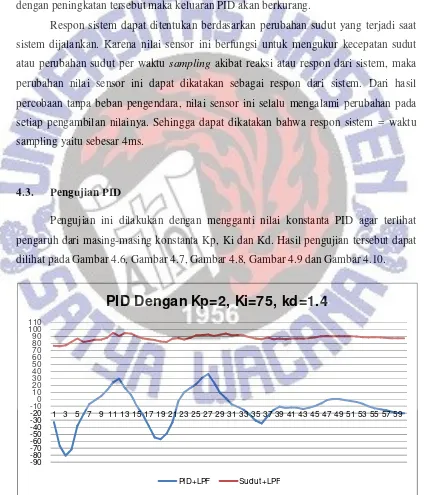
Kec_Sudut dan PID
Kec Sudut PID+LPF
Berdasarkan hasil pengujian tersebut, terlihat bahwa kecepatan sudut yang
terukur selalu berlawanan arah dengan sudut yang terjadi, serta akan meningkat saat
nilai PID mulai meningkat. Hal ini menunjukan bahwa sensor yang digunakan berhasil
merespon kondisi yang terjadi. Sesuai dengan fungsinya, sensor ini digunakan untuk
meredam kecepatan yang berlebihan, sehingga saat keluaran PID mengalami
peningkatan secara cepat maka keluaran sensor ini juga akan meningkat. Sehingga
dengan peningkatan tersebut maka keluaran PID akan berkurang.
Respon sistem dapat ditentukan berdasarkan perubahan sudut yang terjadi saat
sistem dijalankan. Karena nilai sensor ini berfungsi untuk mengukur kecepatan sudut
atau perubahan sudut per waktu sampling akibat reaksi atau respon dari sistem, maka perubahan nilai sensor ini dapat dikatakan sebagai respon dari sistem. Dari hasil
percobaan tanpa beban pengendara, nilai sensor ini selalu mengalami perubahan pada
setiap pengambilan nilainya. Sehingga dapat dikatakan bahwa respon sistem = waktu
sampling yaitu sebesar 4ms.
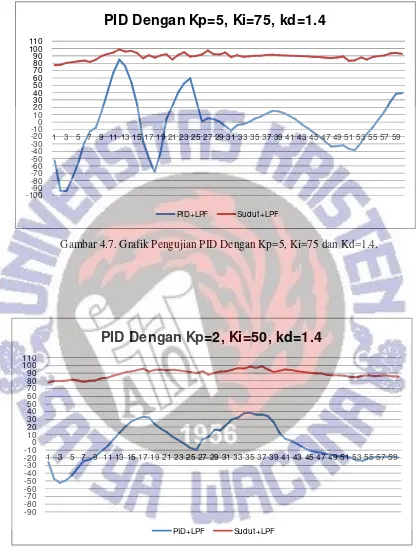
4.3. Pengujian PID
Pengujian ini dilakukan dengan mengganti nilai konstanta PID agar terlihat
pengaruh dari masing-masing konstanta Kp, Ki dan Kd. Hasil pengujian tersebut dapat
dilihat pada Gambar 4.6, Gambar 4.7, Gambar 4.8, Gambar 4.9 dan Gambar 4.10.
-90 -80 -70 -60 -50 -40 -30 -20 -10 0 10 20 30 40 50 60 70 80 90 100 110
1 3 5 7 9 11 13 15 17 19 21 23 25 27 29 31 33 35 37 39 41 43 45 47 49 51 53 55 57 59
PID Dengan Kp=2, Ki=75, kd=1.4
36
Gambar 4.7. Grafik Pengujian PID Dengan Kp=5, Ki=75 dan Kd=1.4.
Gambar 4.8. Grafik Pengujian PID Dengan Kp=2, Ki=50 dan Kd=1.4.
-100
PID Dengan Kp=5, Ki=75, kd=1.4
PID+LPF Sudut +LPF
PID Dengan Kp=2, Ki=50, kd=1.4
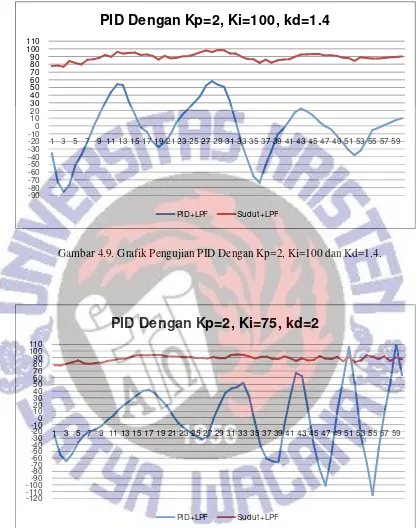
Gambar 4.9. Grafik Pengujian PID Dengan Kp=2, Ki=100 dan Kd=1.4.
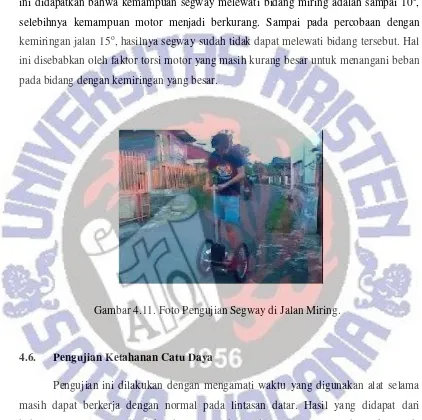
Gambar 4.10. Grafik Pengujian PID Dengan Kp=2, Ki=75 dan Kd=2.
-90
PID Dengan Kp=2, Ki=100, kd=1.4
PID+LPF Sudut +LPF
PID Dengan Kp=2, Ki=75, kd=2
38
Tabel 4.1. Hasil Pengujian Beban dan Kecepatan.
Berdasarkan hasil-hasil pengujian tersebut dapat disimpulkan beberapa
pembuktian. Yang pertama peningkatan Kp akan meningkatkan rise time sistem, yang kedua peningkatan Ki yang berlebihan dapat memperbanyak osilasi sistem dan yang
ketiga peningkatan Kd yang terlalu besar dapat memperbesar error sistem. Dari pengujian yang telah dilakukan didapatkan perbandingan konstanta-konstanta idealnya
yaitu sebesar Kp=2, Ki=75 dan Kd=1.4.
4.4. Pengujian Beban dan Kecepatan
Pengujian dilakukan pada kondisi jalan datar dengan memberi beban yang
bervariasi kemudian diukur kecepatan maksimumnya. Pengukuran kecepatan
maksimum tersebut menggunakan speedometer untuk kendaraan sepeda. Dari pengujian
yang telah dilakukan, didapatkan hasil seperti yang terlihat pada Tabel 4.1.
No Beban Kecepatan
1 <10 kg 5.5 km/jam
2 <20 kg 5.5 km/jam
3 <30 kg 5.5 km/jam
4 <40 kg 5.5 km/jam
5 <50 kg 5.5 km/jam
6 <60 kg 5.5 km/jam
7 <=70 kg 5.5 km/jam
Berdasarkan Tabel 4.1, terlihat bahwa kecepatan maksimum untuk setiap
bebannya tidak mengalami penurunan. Hal ini menunjukan bahwa kemampuan driver
motor untuk menyuplai arus ke motor dapat maksimum sehingga torsi motor masih
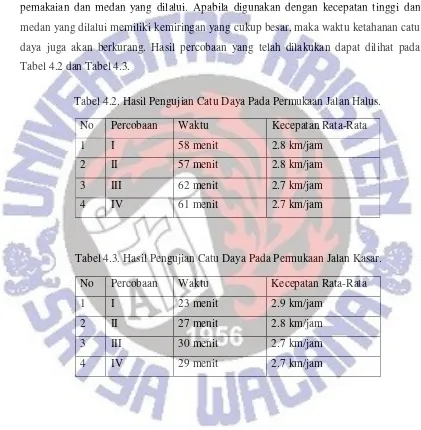
Gambar 4.11. Foto Pengujian Segway di Jalan Miring.
4.5. Pengujian Bidang Miring
Pengujian ini dilakukan dengan beban 53 kg pada jalan aspal yang memiliki
kemiringan maksimal sekitar 10o seperti terlihat pada gambar 4.11. Dari hasil pengujian
ini didapatkan bahwa kemampuan segway melewati bidang miring adalah sampai 10o,
selebihnya kemampuan motor menjadi berkurang. Sampai pada percobaan dengan
kemiringan jalan 15o, hasilnya segway sudah tidak dapat melewati bidang tersebut. Hal
ini disebabkan oleh faktor torsi motor yang masih kurang besar untuk menangani beban
pada bidang dengan kemiringan yang besar.
4.6. Pengujian Ketahanan Catu Daya
Pengujian ini dilakukan dengan mengamati waktu yang digunakan alat selama
masih dapat berkerja dengan normal pada lintasan datar. Hasil yang didapat dari
beberapa pengamatan adalah ketahanan catu daya sekitar 60 menit saat digunakan pada
kecepatan rata-rata 2.7 km/jam dengan beban 53 kg pada permukaan jalan yang halus.
Sedangkan pada permukaan aspal yang kasar, ketahanan catu daya berkurang menjadi
sekitar 30 menit. Jadi berdasarkan hasil tersebut dapat dikatakan bahwa sistem ini
mengkonsumsi arus sekitar 14.4A dalam waktu ±60 menit pada kecepatan 2.7 km/jam
40
Tabel 4.2. Hasil Pengujian Catu Daya Pada Permukaan Jalan Halus.
Tabel 4.3. Hasil Pengujian Catu Daya Pada Permukaan Jalan Kasar.
dengan kecepatan rata-rata 2.7 km/jam pada beban 53 kg, dapat menempuh jarak sekitar
2700 m pada permukaan jalan yang halus dan 1350 m pada permukaan jalan yang kasar.
Dari hasil tersebut 1 motor akan mengkonsumsi arus sekitar 7.2A pada permukaan jalan
yang halus dan sekitar 14.4A pada permukaan jalan yang kasar. Dari beberapa
percobaan yang telah dilakukan terjadi perbedaan waktu, hal ini tergantung dari cara
pemakaian dan medan yang dilalui. Apabila digunakan dengan kecepatan tinggi dan
medan yang dilalui memiliki kemiringan yang cukup besar, maka waktu ketahanan catu
daya juga akan berkurang. Hasil percobaan yang telah dilakukan dapat dilihat pada
Tabel 4.2 dan Tabel 4.3.
No Percobaan Waktu Kecepatan Rata-Rata
1 I 58 menit 2.8 km/jam
2 II 57 menit 2.8 km/jam
3 III 62 menit 2.7 km/jam
4 IV 61 menit 2.7 km/jam
No Percobaan Waktu Kecepatan Rata-Rata
1 I 23 menit 2.9 km/jam
2 II 27 menit 2.8 km/jam
3 III 30 menit 2.7 km/jam