45
3. METODE
Metode Penelitian
Metode penelitian yang dilakukan menggunakan metode pendekatan sistem. Pendekatan sistem merupakan suatu metodologi pemecahan masalah yang diawali dengan identifikasi serangkaian kebutuhan dan menghasilkan sistem operasi yang efektif. Langkah-langkah yang dilakukan dalam pendekatan sistem meliputi analisa kebutuhan, formulasi permasalahan, identifikasi sistem, dan pemodelan. Pendekatan sistem dicirikan oleh adanya suatu metodologi perencanaan atau pengelolaan, bersifat multidisiplin terorganisir, adanya penggunaan model matematis, berpikir secara kualitatif, optimasi serta dapat diaplikasikan dengan komputer. Pendekatan sistem menggunakan model suatu abstraksi keadaan nyata ataupun penyederhanaan sistem nyata untuk pengkajian suatu masalah. Dalam penelitian ini metode yang digunakan adalah :
a. Rancang bangun perangkat lunak untuk membedakan jenis tanaman dengan analisis dimensi fraktal, perangkat lunak penentu kepadatan serangan gulma.
b. Rancang bangun alat penyemprot berbasis sensor
c. Rancang bangun model pengendalian gulma dengan sensor kamera digital berbasis sistem multi agen.
d. Analisa peningkatan kecepatan kerja sistem multi agen dengan komputasi paralel.
Waktu dan Lokasi Penelitian
Penelitian dilakukan di beberapa tempat sesuai dengan kebutuhan dan ketersediaan peralatan.
- Pengembangan sistem aplikasi dan uji coba model dilakukan di Bagian Teknik Bioinformatika, Departemen Teknik Mesin dan Biosistem , Fakultas Teknologi Pertanian IPB.
- Perancangan perangkat keras, uji coba aplikator berbasis sensor dan pengamatan tanaman dilakukan di Laboratorim Lapangan Prof. Siswadi Departemen Teknik Mesin dan Biosistem IPB.
46 - Pengamatan dan uji coba boom sprayer dilakukan di perkebunan PT Nanco
Sejahtera, Sorong Papua.
- Pengamatan aplikasi berbasis peta dan penyemprotan presisi pada skala luas dilakukan di perkebunan Fazenda Sao Rafael, Fazenda Santa Branca dan Fazenda Cementes Mutuca di Negara Bagian Parana, Brasil.
- Pengamatan tanaman dan gulma untuk penelitian awal dilakukan pada bulan Juli sampai Oktober 2010 di laboratorim lapangan Prof. Siswadi Departemen Teknik Mesin dan Biosistem , Fakultas Teknologi Pertanian IPB.
- Rancang bangun sistem pendeteksi tanaman dilakukan pada bulan Agustus sampai Desember 2010 di laboratorium Sistem dan Manajemen Mekanisasi Pertanian, Bagian Teknik Bioinformatika, Departemen Teknik Mesin dan Biosistem, Fakultas Teknologi Pertanian IPB.
- Rancang bangun sistem pendeteksi serangan gulma dilakukan pada bulan Agustus sampai Desember 2010 di laboratorium Sistem dan Manajemen Mekanisasi Pertanian, Bagian Teknik Bioinformatika, Departemen Teknik Mesin dan Biosistem, Fakultas Teknologi Pertanian IPB.
- Rancang bangun aplikator cairan berbasis PWM (Pulse Width Modulator) dilakukan pada bulan Maret sampai Juni 2011.
- Rancang bangun multi agen dan sistem komputasi paralel dilakukan pada bulan September sampai Desember 2012.
Bahan dan Alat
Bahan yang digunakan dalam penelitian adalah tanaman gulma pada lahan terbuka dan gulma yang tumbuh pada tanaman pokok kacang tanah, jagung dan kedelai. Tanaman kacang tanah dan jagung diamati secara terus menerus mulai dari minggu ke-1 sampai minggu ke-5 setelah tanam.
Peralatan yang digunakan adalah berupa aplikator cairan elektrik, kamera digital, aktuator berbasis buka-tutup kran, aktuator PWM untuk rancang bangun dan uji coba VRA berbasis sensor. Pada pengamatan aplikasi penyemprotan di perkebunan besar peralatan yang dipergunakan adalah boom sprayer dengan lebar kerja 12 meter dan 24 meter dengan berbagai tingkat teknologi, mulai dari boom
47 sprayer dengan teknologi paling sederhana yang bekerja dengan tenaga pompa dari PTO (Power Take Off) dengan RPM dan satu buah regulator pompa, sampai dengan boom sprayer berteknologi tinggi dengan tenaga penggerak pompa elektrik yang dilengkapi regulator ganda dilengkapi dengan sprayer control, console, GPS, autosteering, dan air assist dan. Peralatan pendukung yang dipergunakan berupa seperangkat komputer jinjing, perangkat lunak pengolah citra, bahasa pemrograman Assembler, C-Sharp dan Visual Basic.
Prosedur Penelitian
Penelitian ini menitikberatkan aplikasi sistem multi agen yang terintegrasi dengan sistem supervisori pada pertanian presisi berbasis sensor. Studi kasus dilakukan pada penanganan gulma pada suatu lahan untuk memperoleh hasil pertanian yang maksimal, penggunaan input yang minimal, dan mengurangi dampak negatif bagi lingkungan. Pemilihan metode real-time VRA sebagai studi khusus dilatarbelakangi oleh pertimbangan bahwa pertumbuhan gulma di lahan pertanian memerlukan pengendalian yang tepat sesuai dengan kondisi serangan yang terjadi secara real-time, dan pertimbangan bahwa masih terbuka peluang penelitian di bidang ini baik dari segi pendeteksian serangan gulma maupun rancang bangun peralatan aplikator cairan yang digunakan. Berdasarkan formulasi permasalahan yang akan dikaji maka prosedur penelitian dibagi menjadi beberapa sub-penelitian yang menunjang tujuan yang akan dicapai, antara lain : - Pengembangan metode untuk mengidentifikasi jenis tanaman. Penelitian
tentang metode untuk mengidentifikasi jenis tanaman dibahas pada Bab 5. - Pengembangan metode untuk menentukan tingkat kepadatan serangan gulma,
yang dibahas pada Bab 6.
- Rancang bangun bangun sistem penyemprot dibahas pada Bab 7.
- Penelitian tentang sistem multi agen dan komputasi paralel dibahas pada Bab 8. - Pengembangan sistem supervisori yang mampu memandu kegiatan off-farm
dan on-farm pengendalian gulma dibahas pada Bab 4.
Bentuk keterkaitan antar penelitian adalah sebagaimana diilustrasikan pada Gambar 11.
48 Gambar 11. Diagram keterkaitan antar penelitian
Identifikasi Sistem
Identifikasi sistem bertujuan untuk memberikan gambaran terhadap sistem yang dikaji dalam bentuk diagram. Diagram yang digunakan adalah
Pengembangan Metode Identifikasi Jenis Tanaman
Pengembangan Metode Penentuan Kepadatan
Serangan Gulma
Rancang Bangun Sistem Penyemprot Berbasis Sensor
Sistem Multi Agen dan Komputasi Paralel Rancang Bangun Sistem
Supervisori
Sistem Konsultasi (Off Farm)
Sistem Kontrol (On Farm)
Penentuan Kebutuhan Alat dan Bahan untuk Pengendalian Gulma
Perlakuan Seragam
Perlakuan Presisi
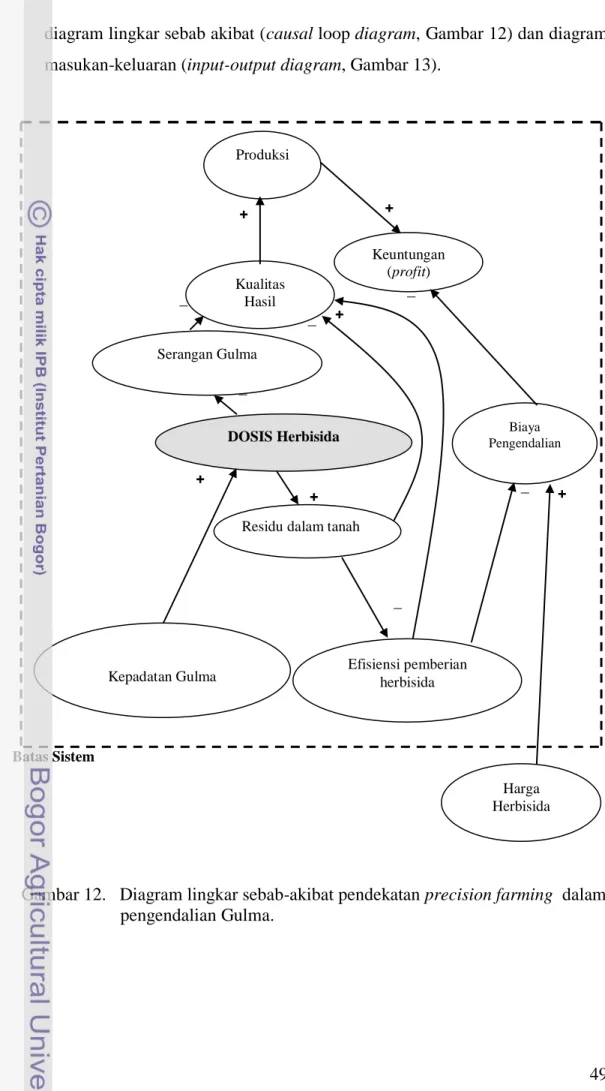
49 diagram lingkar sebab akibat (causal loop diagram, Gambar 12) dan diagram masukan-keluaran (input-output diagram, Gambar 13).
Batas Sistem
Gambar 12. Diagram lingkar sebab-akibat pendekatan precision farming dalam pengendalian Gulma. DOSIS Herbisida Efisiensi pemberian herbisida Biaya Pengendalian Keuntungan (profit) Kualitas Hasil Produksi + + _ _ Kepadatan Gulma
Residu dalam tanah
+ _ + _ + Serangan Gulma _ _ Harga Herbisida +
50
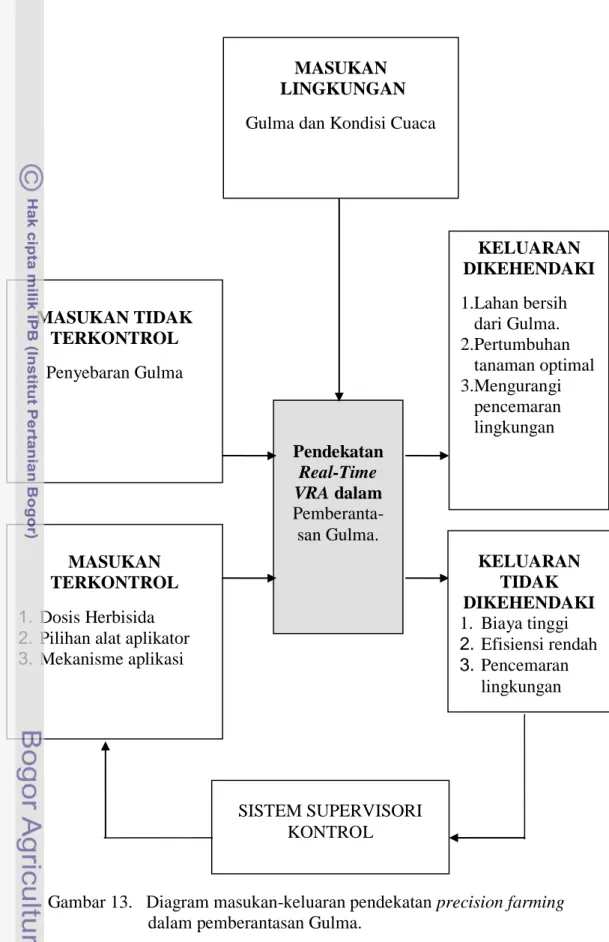
Gambar 13. Diagram masukan-keluaran pendekatan precision farming dalam pemberantasan Gulma.
MASUKAN
LINGKUNGAN
Gulma dan Kondisi Cuaca
Pendekatan Real-Time VRA dalam Pemberanta-san Gulma. MASUKAN TIDAK TERKONTROL Penyebaran Gulma MASUKAN TERKONTROL 1. Dosis Herbisida 2. Pilihan alat aplikator 3. Mekanisme aplikasi KELUARAN DIKEHENDAKI 1.Lahan bersih dari Gulma. 2.Pertumbuhan tanaman optimal 3.Mengurangi pencemaran lingkungan KELUARAN TIDAK DIKEHENDAKI 1. Biaya tinggi 2. Efisiensi rendah 3. Pencemaran lingkungan SISTEM SUPERVISORI KONTROL
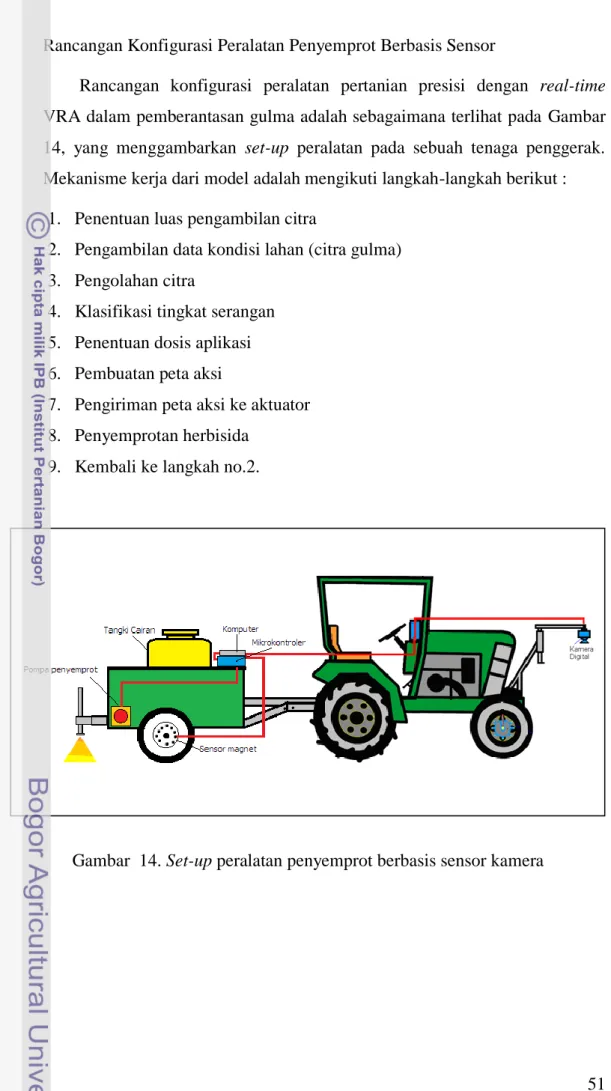
51 Rancangan Konfigurasi Peralatan Penyemprot Berbasis Sensor
Rancangan konfigurasi peralatan pertanian presisi dengan real-time VRA dalam pemberantasan gulma adalah sebagaimana terlihat pada Gambar 14, yang menggambarkan set-up peralatan pada sebuah tenaga penggerak. Mekanisme kerja dari model adalah mengikuti langkah-langkah berikut :
1. Penentuan luas pengambilan citra
2. Pengambilan data kondisi lahan (citra gulma) 3. Pengolahan citra
4. Klasifikasi tingkat serangan 5. Penentuan dosis aplikasi 6. Pembuatan peta aksi
7. Pengiriman peta aksi ke aktuator 8. Penyemprotan herbisida
9. Kembali ke langkah no.2.
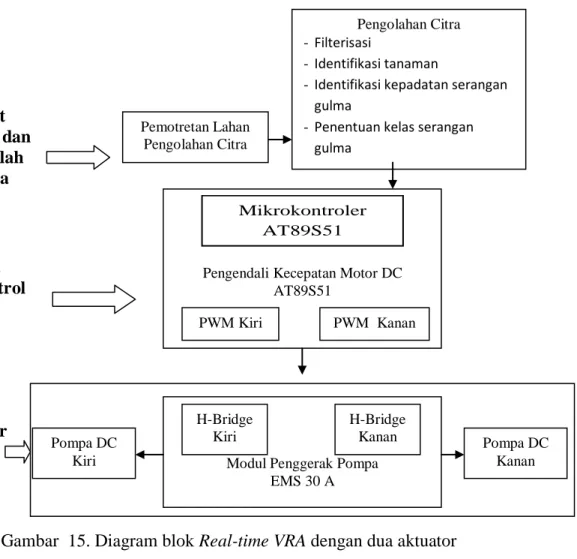
52 Gambar 15. Diagram blok Real-time VRA dengan dua aktuator
Gambar 16. Skenario cara kerja sistem. Pengendali Kecepatan Motor DC
AT89S51 Mikrokontroler
AT89S51
PWM Kanan PWM Kiri
Modul Penggerak Pompa EMS 30 A H-Bridge Kiri H-Bridge Kanan Pompa DC Kanan Pompa DC Kiri Aktuator Pompa Unit Pengontrol Unit Sensor dan Pengolah Citra Pengolahan Citra - Filterisasi - Identifikasi tanaman
- Identifikasi kepadatan serangan gulma
- Penentuan kelas serangan gulma
Pemotretan Lahan Pengolahan Citra
Pengambilan Citra
Filterisasi Citra
Analisa Jenis Tanaman
Batas serangan gulma
Analisa Kepadatan Serangan
Dosis Penyemprotan
Penyemprotan sesuai Dosis dan Lokasi Sensor Jarak
53 Skenario cara kerja sistem pada kecepatan maju peralatan konstan secara garis besar mengikuti tahapan kerja berikut :
- Sensor penentu jarak tempuh membaca jarak yang ditempuh, dan menjadi pemicu kerja kamera untuk menangkap citra lahan dan pemicu kerja dari aktuator penyemprot.
- Kamera digital melakukan pengambilan citra lahan.
Pada pelaksanaan penelitian proses pengambilan citra lahan dilakukan pada kegiatan penelitian yang terpisah.
- Citra yang ditangkap pada memori komputer difilterisasi sesuai kebutuhan. - Citra yang telah difilterisasi mengalami proses analisa jenis tanaman dan
analisa kepadatan serangan gulma.
- Berdasarkan hasil klasifikasi serangan selanjutnya dilakukan penyemprotan sesuai dosis dan lokasi.
Jenis Analisa
Peralatan dan model yang dibangun selanjutnya dianalisa dengan cara melakukan pengukuran kinerja. Jenis analisa yang dilakukan antara lain :
1. Analisa kecepatan kerja sistem - Kecepatan kerja tiap agen
- Kecepatan sistem pada komputasi sekuensial - Kecepatan sistem pada komputasi secara paralel
- Perbandingan hasil pemrosesan citra tunggal dan majemuk 2. Segmentasi serangan gulma dengan metode bertingkat dan Bayes. 3. Analisa bentuk semprotan nozzle tunggal
4. Analisa penyemprotan nozzle ganda 5. Analisa ketepatan lokasi penyemprotan 6. Analisa ketepatan dosis penyemprotan