2
BALOK SEDERHANA DENGAN
METODE KLASIK
2.1. Statika
Statika adalah salah satu pendekatan dalam analisis struktur klasik yang paling awal diaplikasikan, pada masa-masa dimana teknologi komputasi masih belum berkembang. Dengan statika perhitungan struktur dapat dilakukan secara manual sehingga bersifat praktis. Walaupun bersifat praktis, struktur yang dapat dianalisis dengan pendekatan statika terbatas tipenya.
Statika bekerja berdasarkan tinjauan keseimbangan gaya dalam suatu sistem global. Jumlah persamaan-persamaan yang dapat dibentuk dari tinjauan keseimbangan sama dengan jumlah gaya-gaya reaksi pada tumpuan yang ingin diperoleh besarnya. Umumnya beban-beban sudah diketahui terlebih dahulu sehingga menjadi masukan (input) dari program. Keluaran (output) dari program yang pertama adalah gaya-gaya reaksi. Dari keluaran pertama dapat juga diperoleh diagram gaya-gaya dalam. Dengan mengaplikasikan ilmu kekuatan bahan (strength of material), tegangan-tegangan yang bekerja pada struktur juga dapat diperoleh.
Perhitungan dengan pendekatan statika umumnya dilakukan secara manual, tetapi dapat juga dilakukan dengan bantuan komputer melalui pemrograman. Perhitungan dengan komputer membantu mempercepat dan memperhalus penggambaran diagram gaya-gaya dalam. Walaupun demikian perhitungan dengan bantuan komputer dengan pendekatan statika tidak begitu kompak dibanding dengan pendekatan elemen hingga. Hal ini dapat dilihat setelah mengaplikasikan program-program yang ada di dalam buku ini.
Masalah yang dapat diselesaikan dengan Statika adalah struktur balok sederhana. Ujung-ujung balok sederhana bertumpu di dua tumpuan. Sebelum membuat aplikasi program balok sederhana perlu dianalisis permasalahan dan teknik solusinya.
Permasalahan dan solusinya perlu disusun dengan cara yang sistematis dan elegan untuk dapat dibuat programnya yang terdiri dari
1. studi masukan (input )
2. tentukan lingkup balok sederhana
3. teknik solusi yang sistematis dan mudah diaplikasikan 4. menyusun keluaran (output)
Langkah pertama dalam menyusun program adalah dengan melakukan studi kecil mengenai variabel-variabel input yang mungkin pada suatu permasalahan dengan lingkup tertentu. Pada balok sederhana, lingkupnya dapat dibatasi hanya untuk balok sederhana menerus lurus dengan perletakan pada ujung-ujungnya (tanpa kantilever) misalnya. Untuk lingkup yang lebih luas misalnya dengan mengakomodasi kemungkinan adanya kantilever pada salah satu atau kedua ujung pada masalah balok lurus. Untuk lingkup yang lebih luas lagi yaitu dengan mengakomodasi kemungkinan bentuk balok yang tidak menerus lurus berikut gaya-gaya yang mempunyai sudut dengan sumbu x misalnya dan juga balok Gerber.
Pada pembahasan contoh pemrograman berikut lingkup bahasan meliputi balok sederhana dengan kemungkinan adanya kantilever pada salah satu atau kedua ujung. Balok dengan elemen-elemn tegak dan miring atau balok bidang tidak terlingkupi.
2.2.1. Analisis masukan (Input)
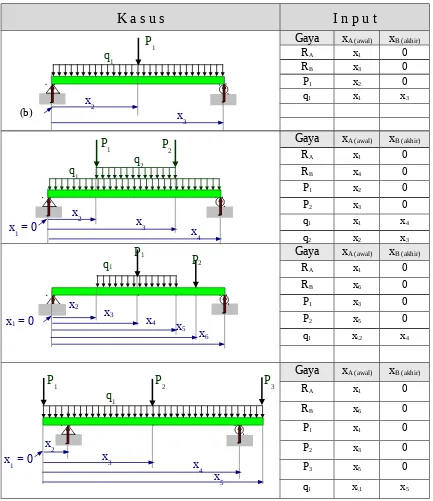
Input dari masalah balok sederhana meliputi variable-variabel input yang dapat diklasifikasikan sebagai
A. Input geometri balok yang berhubungan dengan
Panjang balok
Lokasi (titik-titk) perletakan sendi dan rol
Lokasi (titik-titk) gaya terpusat bekerja
Lokasi (titik-titik) awal dan akhir gaya terdistribusi merata bekerja. B. Input besar gaya terpusat atau terdistribusi yang bekerja
Gaya xawal xakhir
Dimana, P/q : gaya yang bekerja, xawal : koordinat awal, xakhir : koordinat akhir Untuk gaya terpusat xakhir dibaut nol. Untuk gaya reaksi RA dan RB yang belum diketahui juga dibuat nol sehingga sistem informasi input dapat di susun dengan kompak seperti yang ditunjukkan pada Tabel 2-1.
menjadi 33bentuk matriks dimana untuk gaya-gaya reaksi yang belum diketahui diisikan dengan angka nol.
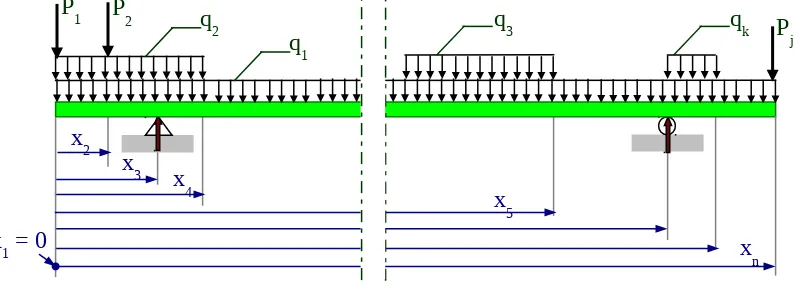
Ujung-ujung balok sederhana bertumpu di dua tumpuan tetapi dapat juga bertumpu sedemikian sehingga sebagian balok dalam poisisi mangganjur (ada kantilever) . Untuk dapat menyelesaikan semua kasus maka dibuat suatu gambar model yang mencakup semua kemungkinan masalah balok sederhana. Model umum untuk lingkup bahasan diatas diambil dari model geometri yang paling kompleks, dalam hal ini balok sederhana dengan dua kantilever pada ujung-ujungnya.
2.2.2. Penyusunan Algoritma program x1 = 0
x5 x
3
P
1 P2 P
j
q
1
x 2
xn x4
q
2 q3 qk
Input : Gaya-gaya dan posisinya
P/qxawalx2akhirRAxs10RBxs20P1xp10 : ::
::
:Pjxpj0q1xq1Axq1B:
:: :: :qixqiAxqiB
(a) (a)
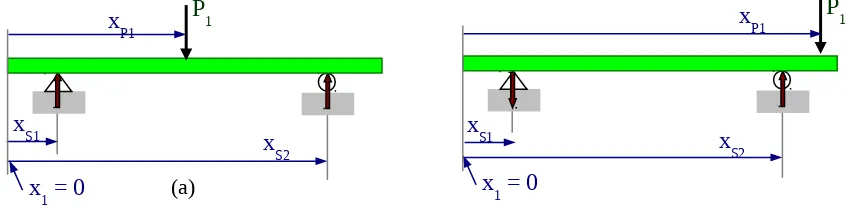
Gambar 2-. Satu Gaya Terdistrtibusi (a) dominan bentang utama (b)
dominan bentang kantilever xq2
xq1 xS1 x
S2 x1 = 0 xq2
q1
xq1 xS2 x1 = 0 xS1
Matriks Input :
Gaya =
Untuk mempermudah pemrograman, maka perlu dirumuskan formulasi yang berlaku umum untuk lingkup kasus balok sederhana dengan asusmisi-asumsi yang telah dijelaskan di atas.
Reaksi perletakan akibat satu gaya terpusat dititik manapun bekerja pada suatu balok sederhana adalah sebagai berikut
MA = 0
Akibat sejumlah n gaya terpusat, formulasi umumnya dapat dinotasikan sebagai berikut
n
Dalam bentuk yang lebih ringkas
Bandung Structral Engineeringe
-SchoolxS1
Reaksi perletakan akibat gaya terbagi rata yang bekerja pada satu segmen adalah
Dalam bentuk yang lebih ringkas
1
RA dan RB yang diperoleh dari penjumlahan akibat gaya-gaya terpusat dan gaya-gaya terdistribusi yang bekerja sepanjang balok dapat dirumuskan sebagai
)
2.3. Penyusunan program
2.3.1. Input data geometri dan beban
Input data geometri dan beban dikemas dalam bentuk matriks seperti yang telah dijelaskan di atas
>> Gaya = [ 0 0 0 ; 0 8 0 ; 500 4 0 ; 50 0 2 ; 100 0 8 ] Enter
2.3.2. Mengolah matriks input Input : Gaya-gaya dan posisinya
P/qxawalx2akhirRA00RB8050040500210 008
Matriks Input :
Gaya =
Gambar 2-5. Contoh Kasus balok sederhana
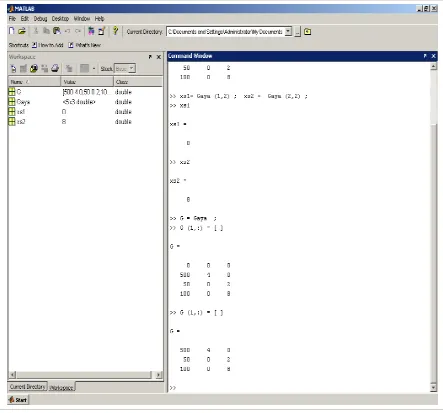
Matriks gaya harus dipilah terlebih dahulu untuk membedakan antara informasi yang berisi dua gaya reaksi dengan gaya-gaya aksi (beban-beban). Dua gaya berikut koordinatnya pada dua baris teratas memberikan informasi koordinat-koordinat perletakan xs1 dan xs2. Dalam MATLAB pengambilan data xs1 dan xs2 adalah sebagai berikut
>> xs1= Gaya (1,2) ; xs2 = Gaya (2,2) ; Enter >> xs1 Enter
>> xs2 Enter
Operasi dalam MATLAB untuk menghilangkan baris pertama dan kedua dari matriks Gaya dan menghasilkan matriks G yang hanya berisi informasi tentang gaya-gaya aksi. Sebelum Matriks Gaya dihapus dua baris pertamanya terlebih dahulu didefinisikan matriks G = Gaya sehingga setelah dihapus hanya matriks G nya saja atau matriks Gaya tetap tidak berubah. Syntax penghapusan baris pertama dan kedua dari matriks G adalah
2.3.3. Menghitung Gaya Reaksi
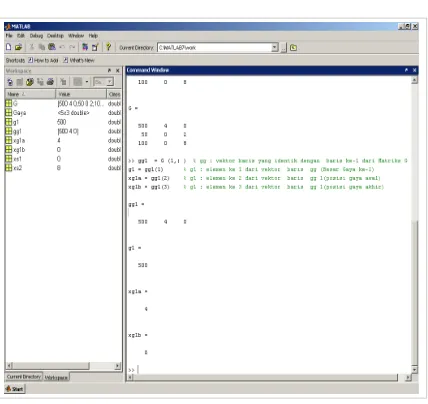
Untuk menghitung gaya rekasi RA akibat gaya P1ambil gaya ke-1 dari matriks informasi gaya (G) yang telah hilang kandungan gaya-gaya reaksinya dengan terlebih dahulu mengambil kolom ke-1 yang berisi informasi gaya ke-1 yang bekerja. Kemudian baru mengambil baris gaya yang pertama, berturut-turut dengan syntax
>> gg1 = G (1,: ) % gg : vektor baris yang identik dengan baris ke-1 dari Matriks G Enter >> g1 = gg1(1) % g1 : elemen ke 1 dari vektor baris gg (Besar Gaya ke-1) Enter Selanjutnya dalah menetukan koordinat tempat gaya bekerja
>> xg1b = gg1(3) % g1 : elemen ke 3 dari vektor baris gg 1(posisi gaya akhir) Enter
Kemudian tentukan komponen RA akibat gaya tersebut di atas. Terdapat dua kemungkinan formulasi komponen RA yaitu gaya dapat berupa gaya terpusat atau terdistribusi yang ditentukan oleh unsur-unsur pada kolom ke 3 dari matriks informasi. conditionalnya adalah sebagai berikut
Jika xg1b = 0
maka komponen RA & RB dihitung sesuai persamaan 2.5-a.
Kalau tidak maka
komponen RA & RB dihitung sesuai persamaan 2.5-b
Selesai
Dalam MATLAB syntaxnya berikut adalah sebagai berikut Hasil eksekusi untuk Gaya ke-1 ditunjukkan Gambar dibawah
Jika terdapat 3 gaya yang bekerja maka, berturut-turut syntax yang diketikkan pada jendela perintah selanjutnya adalah
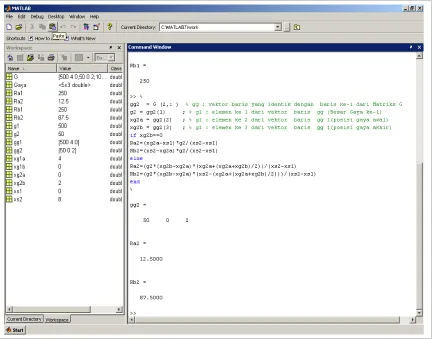
gg2 = G (2,: ) % gg : vektor baris yang identik dengan baris ke-1 dari Matriks G g2 = gg2(1) ; % g1 : elemen ke 1 dari vektor baris gg (Besar Gaya ke-1) xg2a = gg2(2) ; % g1 : elemen ke 2 dari vektor baris gg 1(posisi gaya awal) xg2b = gg2(3) ; % g1 : elemen ke 3 dari vektor baris gg 1(posisi gaya akhir)
if xg2b==0
Ra2=(xg2a-xs1)*g2/(xs2-xs1) Rb2=(xs2-xg2a)*g2/(xs2-xs1)
else
Ra2=(g2*(xg2b-xg2a)*(xg2a+(xg2a+xg2b)/2))/(xs2-xs1) Rb2=(g2*(xg2b-xg2a)*(xs2-(xg2a+(xg2a+xg2b)/2)))/(xs2-xs1)
end
Hasil eksekusi untuk gaya ke-2 ditunjukkan pada Gambar dibawah
Dan untuk gaya ke-3, analog dengan gaya ke-1 dan ke-2
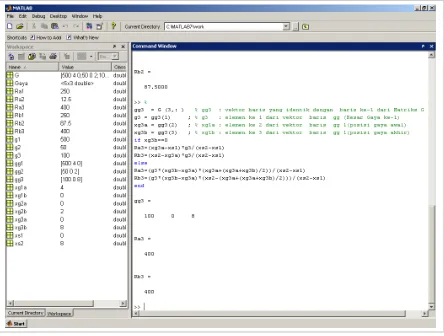
gg3 = G (3,: ) ;% gg : vektor baris yang identik dengan baris ke-1 dari Matriks G g3 = gg3(1) ;% g1 : elemen ke 1 dari vektor baris gg (Besar Gaya ke-1) xg3a = gg3(2) ;% g1 : elemen ke 2 dari vektor baris gg 1(posisi gaya awal) xg3b = gg3(3) ;% g1 : elemen ke 3 dari vektor baris gg 1(posisi gaya akhir)
ifxg3b==0
Ra3=(xg3a-xs1)*g3/(xs2-xs1) Rb3=(xs2-xg3a)*g3/(xs2-xs1)
else
Ra3=(g3*(xg3b-xg3a)*(xg3a+(xg3a+xg3b)/2))/(xs2-xs1) Rb3=(g3*(xg3b-xg3a)*(xs2-(xg3a+(xg3a+xg3b)/2)))/(xs2-xs1)
end
%
Hasil eksekusi untuk gaya ke-3 ditunjukkan pada Gambar dibawah
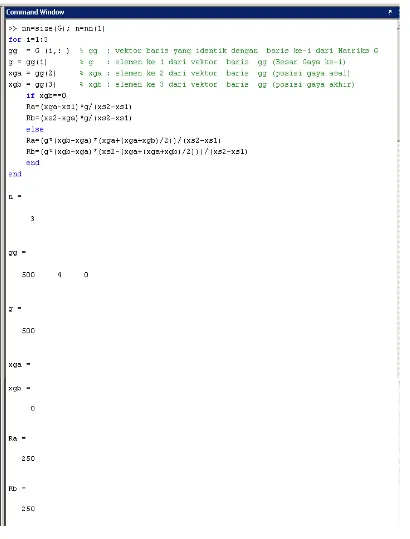
Ketiga proses dengan perintah terpisah tersebut diatas dapat diringkas dengan membuat loop dengan syntax MATLAB sebagai berikut
nn=size(G); n=nn(1)
for i=1:3
gg = G (i,: ) % gg : vektor baris yang identik dengan baris ke-i dari Matriks G g = gg(1) % g : elemen ke 1 dari vektor baris gg (Besar Gaya ke-i) xga = gg(2) % xga : elemen ke 2 dari vektor baris gg (posisi gaya awal) xgb = gg(3) % xgb : elemen ke 3 dari vektor baris gg (posisi gaya akhir) if xgb==0
Ra=(xga-xs1)*g/(xs2-xs1) Rb=(xs2-xga)*g/(xs2-xs1) else
Ra=(g*(xgb-xga)*(xga+(xga+xgb)/2))/(xs2-xs1) Rb=(g*(xgb-xga)*(xs2-(xga+(xga+xgb)/2)))/(xs2-xs1) end
end
Hasil eksekusi loop untuk ketiga gaya ditunjukkan Gambar dibawah ini
Dibandingkan program tanpa loop di atas, program dengan loop jauh lebih singkat, apalagi bila loop dilakukan puluhan, ratusan bahkan ribuan kali. Hanya saja, teks diatas akan menyebabkan nilai-nilai yang dicari seperti gg, g, xga, xgb serta RA dan RB hasil
loop ke-1 (i =1) akan pada selalu terhapus oleh nilai gg, g, xga, xgb serta RA dan RB hasil
loop ke-2 dan akan terhapus lagi pada loop selanjutnya.
Untuk kasus loop yang besar misalnya puluhan atau lebih maka tidak mungkin menjumlahkan dengan cara sederhana di atas yang dilakukan diluar loop. Oleh karena itu perlu dikembangkan teknik untuk menjumlahkan unsur-unsur RA maupun RB justru dengan memanfaatkan loop yang ada.
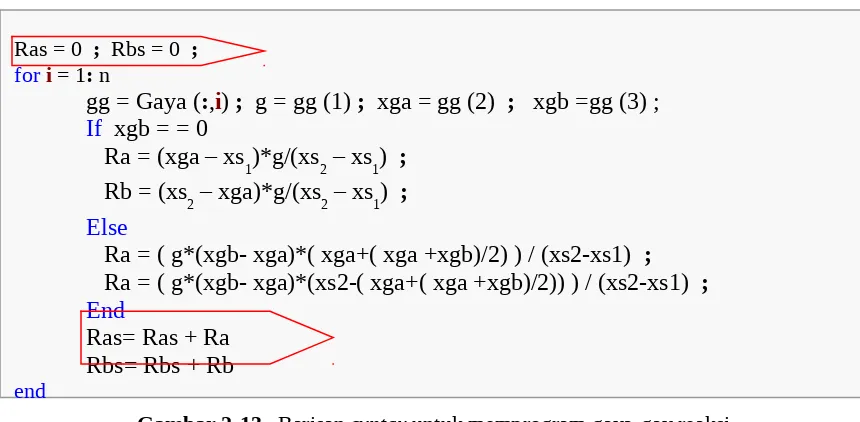
Salah satu sifat dari loop adalah nilai suatu variabel akan selalu terbarui seperti yang ditunjukkan pada contoh loop di atas dimana nilai RA atau RB selalu terbarui. Berdasarkan sifat ini maka nilai total RA dapat diperoleh dengan memberikan harga awal RAs = 0 untuk kemudian melengkapi loop dengan syntax Ras= Ras + Ra , sehingga loop menjadi
Pada i=1, Ras(i=1) diperoleh dari penjumlahan Ras awal (initial) yang bernilai 0 dengan Ra(i=1) sehingga diperoleh
Ras(i = 1) = Ras(awal) + Ra(i=1) = 0 + Ra(1)
Pada i=2 diperoleh nilai baru Ra(i=2) untuk kemudian dijumlahkan dengan Ras terakhir Ras(i=1) menghasilkan
Ras(i = 2) = Ras(i=1) + Ra(i=2) = Ra(1) + Ra(2)
Begitu selanjutnya sampai Ras(n) sedemikian sehingga Ras = 0 ; Rbs = 0 ;
fori = 1: n
gg = Gaya (:,i) ; g = gg (1) ; xga = gg (2) ; xgb =gg (3) ;
If xgb = = 0 Ra = (xga – xs
1)*g/(xs2 – xs1) ; Rb = (xs2 – xga)*g/(xs2 – xs1) ;
Else
Ra = ( g*(xgb- xga)*( xga+( xga +xgb)/2) ) / (xs2-xs1) ;
Ra = ( g*(xgb- xga)*(xs2-( xga+( xga +xgb)/2)) ) / (xs2-xs1) ;
End
Ras= Ras + Ra Rbs= Rbs + Rb end
Gambar 2-12.b. Eksekusi dan hasil semua gaya dan posisinya denganl loop
Kelemahan algoritma diatas adalah nilai RA atau RB akibat masing-masing gaya yang tidak dapat dipanggil kembali setelah loop tereksekusi. Hasil akhir adalah nilai Ras yang merupakan nilai penjumlahan dan hasil akhir RA pada i=1 atau RA (i = n)
Keterbatasan di atas dapat diatasi dengan menyusun vektor nilai-nilai RA akibat masing-masing gaya dengan terlebih dahulu merubah RA dan RB awal menjadi vektor dengan panjang yang sama dengan jumlah gaya(n) sehingga RAs = RBs =[ 0 0 ...0 ] dimana dimensi vektor nol RAs = RBs adalah 1 x n dan menyisipi teks perhitungan RA dengan RA (i)
2.3.4. Jendela Editor dan M-File
Untuk operasi aljabar atau operasi matematika lainnya yang sederhana dan hanya terdiri dari beberapa baris dapat disusun sekaligus dieksekusi pada jendela perintah. Untuk menyusun suatu program yang lebih panjang dan rumit perlu bantuan jendela editor yang berfungsi sebagai tempat suatu program disusun.
Hasil penyusunan program atau sub program disimpan pada suatu file dalam MATLAB yang disebut M-File. Jendela editor dibuka melalui tombol file seperti yang ditunjukkan Gambar 2-15.
Jendela editor dafaultnya terpisah dari jendela-jendela default dari MATLAB. Jendela editor dapat dibuat tidak terpisah dengan mnegklik tanda disebelah kiri tanda x (close) dipjok kanan atas jendela. Tampilan jendela-jendela bersifat pilihan sesuai rasa kenyamanan masing-masing pengguna.
Ras = zeros(1,n) ; Rbs = zeros(1,n) ;
fori = 1: n
gg = Gaya (:,i) ; g = gg (1) ; xga = gg (2) ; xgb =gg (3) ;
if xgb = = 0
Ra(i) = (xga – xs1)*g/(xs2 – xs1) ; Rb(i) = (xs
2 – xga)*g/(xs2 – xs1) ;
else
Ra(i) = ( g*(xgb- xga)*( xga+( xga +xgb)/2) ) / (xs2-xs1) ;
Ra(i) = ( g*(xgb- xga)*(xs2-( xga+( xga +xgb)/2)) ) / (xs2-xs1) ;
end
Ras = Ras + Ra (i) Rbs = Rbs + Rb(i) end
Dengan adanya jendela editor, penyusunan serta proses edit dapat dilakukan diluar jendela perintah sehingga memberi kemudahan untuk menyususn progam-program yang panjang. Setelah jendela dibuka, barisan teks-teks program dapat disusun seperti yang ditunjukkan Gambar 2-16.
Penyusunan dalam satu M-File dalam jendela editor memungkinkan program dapat diedit setiap saat tanpa harus mengulang eksekusi program setiap ada perubahan pemrograman. Untuk memudahkan penelusuran program jika ada masalah ada baiknya program disusun berdasarkan blok-blok seperti blok judul, blok awalan, blok input, blok pengolahan input, blok nilai-nilai, vektor-vektor dan matriks-matriks awal, blok subtansi program serta blok plotting diagram-diagram. Pada setiap barisan-barisan perlu diberi komentar-komentar yang tentunya tidak dieksekusi. Pada MATLAB komentar tidak dieksekusi dengan mengawalinya dengan mengetikkan % atau dengan mengklik menandai barisan-barisan yang akan dikomentari untuk kemudian mengklik tombol edit comment pada jendela editor.
Hasil penyusunan input dapat disimpan (save as) dalam bentuk M-file dengan nama sesuai dengan yang diinginkan, misalnya balok_statika. Perlu digaris bawahi disini bahwa nama dari M-File yang disimpan yaitu balok-coba bukan nama judul program yang tercantum pada bagian atas barisan teks-teks program pada jendela editor. Prosedur penyimpanan adalah dengan mengklik tombol File save as pada jendela edior.
Rangkaian yang disusun dalam jendela editor dan disimpan sebagi M-File dapat diseksekusikan pada jendela perintah dengan beberapa cara. Yang paling sederhana adalah dengan mengetikkan nama M-file balok_coba pada jendela perintah.
Cara lainnya adalah dengan mengcopy semua atau sebagian teks yang ada dalam suatu M-File untuk kemudian mempastenya pada jendela perintah. Cara yang kedua biasanya digunakan untuk melakukan pemeriksaan suatu bagian dari teks program yang panjang dan kompleks.
2.3.5. Menghitung gaya-gaya dalam
Gaya-gaya dalam dapat ditinjau pada setiap penampang pada balok dimana pada model balok yang 1D penampang-penampang direpresentasikan oleh titik-titik disepanjang balok. Jumlah titik disepanjang balok adalah tidak berhingga (kontinu) sehingga perlu
diagram kontinunya.
Seperti halnya pada proses menghitung gaya-gaya reaksi, dibutuhkan formulasi umum untuk menghitung gaya-gaya dalam akibat gaya-gaya terpusat maupun terdistribusi.
Momen : Momen akibat satu gaya terpusat
x xp MX RA.x
x > xp MX RA.x P(x xp1)
Momen akibat satu gaya terdistribusi
x xq MX RA.x
Momen akibat satu gaya terdistribusi
xq1A < x xqB
R
AX
R
A
q
(
x
xq
1)
xq1A < x xqB MX RA. q(x xq1)
Gambar 2-18. Rentang-rentang formulasi gaya-gaya dalam akibat satu gaya terpusat dan satu segmen gaya terdistribusi
x > xq
Gaya-gaya dalam dihitung sebanyak jumlah titik yang diambil. Jika balok dibagi menjadi m pias maka jumlah titik untuk mengevaluasi gaya-gaya dalam adalah m+1 titik. Input program perlu ditambah dengan mendefinisikan
m : jumlah interval evaluasi gaya dalam m +1 : jumlah titik evaluasi gaya-gaya dalam
Pola perhitungan gaya dalam mengikuti pola perhitungan gaya-gaya reaksi. Gaya dalam pada suatu titik merupakan penjumlahan dari gaya-gaya dalam akibat masing-masing gaya terpusat dan terdistribusi. Jika terdapat n gaya yang bekerja dan terdapat m+1 titik evaluasi maka ada m+1 perhitungan gaya dalam yang masing-masing merupakan penjumlahan dari n gaya seperti yang ditunjukkan Tabel 2-2 dibawah ini
Tabel 2-2. Gaya reaksi dan gaya dalam akibat gaya-gaya aksi yang bekerja No. Gaya
Aksi
Gaya Reaksi
Evaluasi pada titik ke
1 2 . . . m+1
Tabel 2-2 menunjukkan bahwa untuk satu kasus balok sderhana hanya terdapat satu gaya aksi total (∑G)
dan masing-masing juga satu Gaya-gaya reaksi total ( ∑RA & ∑RB ) tetapi terdapat
m+1 gaya-gaya dalam total (∑M1 &∑V1, ∑M2 & ∑V2, . . . . , ∑Mm+1 & ∑Vm+1).
Pertama akan disajikan algoritma program untuk perhitungan gaya-gaya dalam pada satu titik evaluasi, misalnya gaya-gaya dalam total pada titik evaluasi ke-1 akibat dari n gaya yaitu ∑M1 dan ∑V1. Baru kemudian program diekspansikan untuk menghitung gaya-gaya dalam pada semua titik-titik evalausi yang telah ditentukan (∑M1 &∑V1, ∑M2 & ∑V2, . . . . , ∑Mm+1 & ∑Vm+1).
Loop Induk
Jika xgB = 0
RA & RB dihitung sesuai persamaan 2.5-a.
Loop anak
Jika x xp
momen dihitung sesuai persamaan 2.6-a geser dihitung sesuai persamaan 2.7-a Jika Untuk x > xp
maka momen dihitung sesuai persamaan 2.6-b geser dihitung sesuai persamaan 2.7-a Selesai
Kalau tidak
RA & RB dihitung sesuai persamaan 2.5-b
Loop anak jika x xqA
momen dihitung sesuai persamaan 2.6-c geser dihitung sesuai persamaan 2.7-c jika Untuk x > xqA dan x < xqB
maka momen dihitung sesuai persamaan 2.6-d geser dihitung sesuai persamaan 2.7-d o jika tidak
momen dihitung sesuai pers. 2.6-e geser dihitung sesuai pers. 2.7-e selesai
\
Selesai
Jika gaya-gaya yang bekerja teridiri dari gaya ke-i dimana i= 1,2,...,n Untuk menyajikan hasil perhitungan RA(i), RB(i), Mx(i), Vx(i), akibat tiap-tiap gaya dari n gaya maka perlu disusun vektor hasil perhitungan semua loop dimana
RA(i) = [ RA(1), RA(2),...RA(n) ] RB(i) = [ RA(1), RA(2),... RA(n) ] Mx(i) = [ RA(1), RA(2),... RA(n) ] Vx(i) = [ RA(1), RA(2),... RA(n) ]
dimana
RA(i) : Gaya reaksi di perletakanA akibat gaya ke-i tidak
x≤ xp
xgB
=0 ya
tidak
ya
tidak
x ≤ xqA
x ≤ xqB ya
tidak
ya
ya
RB(i) : Gaya reaksi di perletakanA akibat gaya ke-i
Mx(i) : Momen pada titik x (hanya ada satu titik evaluasi) akibat gaya ke-1 Vx(i) : Geser pada titik x (hanya ada satu titik evaluasi) akibat gaya ke-1
File Balok_statika disisipi syntax sebagai berikut
Misalnya ditentukan untuk satu nilai x (m =1)
Untuk mengetahui harga-harga RA dan RB dari setiap gaya pada loop maka
44
e
Gambar 2-19. Blok program gaya dalam akibat n gaya untuk satu titik evalausi % Nilai-nilai, vektor-vektor dan matriks-matriks awal
%
Mxs =0 ; Vxs = 0 ;
Ras = 0 ; Rbs = 0 ;
%
%---% Perhitungan Gaya-gaya rekasi dan gaya-gaya dalam
%
% Nilai-nilai, vektor-vektor dan matriks-matriks awal
%
Mxs =zeros(n,1) ; Vxs = zeros(n.1);
Ras =zeros(n,1) ; Rbs = zeros(n,1);
%
%---% Perhitungan Gaya-gaya rekasi dan gaya-gaya dalam
Untuk menghitung menjumlahkan Momen dan Geser untuk n gaya maka perlu dibuatkan loop baru dengan terlebih dahulu mengintrodusir nilai awal untuk Mxs dan Vxs untuk keperluan penjumlahan dalam loop yang baru ini. Karena gaya dalam dievaluasi sebanyak m+1 maka perlu dibuat sub loop dalam loop. Loop induk menghitung RA, RB akibat masing-masing gaya sedang sub loop menghitung gaya-gaya dalam Mx dan Vx akibat masing-masing gaya pada banyak (m+1) titik evaluasi serta titik-titik evaluasi pada sumbu-x dalam bentuk vektor Xx,
45
e
%---% Nilai2, vektor2 dan matriks2 awal
%
Mxs =zeros((m+1),1)' ; Vxs =zeros((m+1),1)' ; Ras = 0 ; Rbs = 0 ;
%---% Perhitungan Gaya-gaya rekasi dan gaya-gaya dalam
%
% Penjumlahan gaya-gaya dalam akibat n gaya aksi %
for i = 1:n
Penjumlahan masing-masing gaya-gaya pada tiap-tiap titik evaluasi dapat dilakukan dengan membuat loop baru dengan terlebih dahulu mendefinisikan vektor awal Mxs dengan dimensi (1, m+1) seperti yang juga ditunjukkan pada Gambar 2-22. Karena loop penjumlahan gaya-gaya dalam mempunyai ukuran yang sama dengan loop induk perhitungan gaya-gaya reaksi dan gaya-gaya dalam ( RA, RB Mx dan Vx) maka kedua
loop yang terpisah dapat digabung, dengan mensisipkan teks2 dalam loop penjumlahan kedalam loop perhitungan seperti yang ditunjukkan oleh Gambar 2-23 dan Gambar 2-24.
47
e
Gambar 2-22. Nilai Mx dan Vx yang disusun dalam matriks-matriks (Mx dan Vx) Gaya ke 1 % Nilai2, vektor2 dan matriks2 awal
%
Mxs =zeros((m+1),1)' ; Vxs =zeros((m+1),1)' ; Ras = 0 ; Rbs = 0 ;
%---% Perhitungan Gaya-gaya rekasi dan gaya-gaya dalam
%
% Penjumlahan gaya-gaya dalam akibat n gaya aksi %
plot (X,Y)
dimana X adalah vektor yang berisi absisi pada sumbu-x dan Y adalah vektor yang berisi oordinat pada sumbu y yang dapat merepresentasikan serangkaian gaya-gaya dalam (momen atau geser). Syarat plot 2D adalah kesamaan dimensi vektor X dan Y. Untuk kasus di ats vektor Xx telah disusun dalam masing-masing subloop dengan syntax sebagai berikut
. . .
%---% Pengolahan input
%
xs1= Gaya (1,2) ; xs2 = Gaya (2,2) ; xs = [ xs1 xs2 ]
point=m+1;
intv = (xs2-xs1)/m;
. . .
. . .
%---% Perhitungan Gaya-gaya rekasi dan gaya-gaya dalam
%
nn=size(G); n=nn(1)
for i = 1: n
. . .
. . .
for j = 1: point
x = (j-1)*intv; Xx(j)=x;
isi blok conditional gaya-gaya dalam
. . .
. . .
end
. . .
end %
%---. %---. %---. %---. %---. %---. %---. %---. %---. %---. %---. %---. %---. %---. %---. %---.
Harga point telah di sisipkan pada blok pengolahan input sebelum blok perhitungan . Untuk kasus di atas, diagram momen dan geser dapat diperoleh dengan menambahkan syntax pada file balok_statika sebagai berikut
Syntax subplot(m,n,p) memungkin lebih dari satu gambar dapat disajikan pada satu jenmdela gambar. Angka pertama dan kedua dalam tanda kurung plot, masing-masing m n merupakan dimensi tata letak gambar-gambar yang diatur dalam satu jendela gambar sedang angka ketiga, p merupakan poisi gambar yang akan dieksekusi pada tata letak yang telah diatur.
% Plotting diagram gaya-gaya dalam
subplot (2,1,1) plot(Xx, Mxs) hold on
stem(Xx,Mxs) subplot (2,1,2) plot(Xx, Mxs) hold on
stem(Xx,Mxs)
Gambar 2-26 Plotting diagram gaya-gaya dalam
gesernya dimana diskontinuitas pada posisi tepat ditempat gaya terpusat (gaya pertama) tidak didefinisikan pada conditional gaya dalam geser. Kelemahan program di atas dapat direduksi dengan memperbanyak jumlah titik evaluasi. Jumlah pias yang di-inputkan pada program di atas adalah 8 sehingga jumlah titik evaluasi 9. Dengan menambah pias menjadi 256 misalnya, maka hasil semakin mendekati hasil eksak dari perhitungan manual seperti yang ditunjukkan Gambar 2-28 dibawah ini.
Untuk mendapatkan hasil yang eksak dari model statikanya, maka input dapat diatur sedemikian rupa sehingga pada titik diskontinu geser diprogramkan mempunyai dua hasil yaitu yang pertama adalah geser pada rentang sebelum gaya terpusat bekerja (pada kasus diatas : Vx= RA). Yang kedua adalah geser pada rentang setelah gaya terpusat bekerja. (Vx = RA – P).
Metode eksak ini membutuhkan tambahan subprogram untuk mengekspansikan titik-titik evaluasi yang ada, sedangkan metode pendekatan hanya membutuhkan merubah jumlah titik evaluasi menjadi lebih rapat. Semakin banyak jumlah titik evaluasi maka gambar diagram akan semakin mendekati gambar diagram hasil perhitungan manualnya.
Untuk melengkapi gambar, MATLAB menyediakan banyak fitur pada jendela gambar (figure). Edit gambar dapat dilakukan langsung pada jendela gambar melalui tombol-tombol pada toolbar. Edit juga dapat dilakukan melalui perintah-perintah teks pada jendela editor. Pembahasan manipulasi gambar-gambar akan dibahas pada bab gambar grafik.
2.3.6. Evaluasi program
Setiap program mempunyai lingkupnya sendiri seperti halnya program yang baru dikembangkan di atas. Program terbatas hanya dapat dipalikasikan pada kasus balok sederhana yang lurus sejajar sumbu horisontal dan kontinu. Perlu ditambahkan disini, lingkup program di atas juga terbatas hanya menerima beban-beban vertikal tegak lurus sumbu horisontal. Struktur rangka batang statis tertentu, balok kantilever serta balok-balok Gerber juga tidak termasuk dalam lingkup program yang dikembangkan.
Program-program yang dikembangkan menggunakan MATLAB dapat diperluas lingkupnya dengan menambahkan subprogram-subprogram atau dapat juga digabung dari beberapa program sehingga program gabungannya mengandung pilihan-pilihan aplikasi program yang akan digunakan. Program-program juga dapat dikembangkan bukan dengan memperluas lingkup tetapi dengan mengembangkan metode yang lebih kompak sehingga dapat diaplikasikan dengan lingkup yang luas tanpa membuat program baru untuk setiap kasus.
Statika merupakan salah satu dari metode-metode klasik yang hanya dapat digunakan untuk menganalisis struktur-struktur statis tertentu, yaitu struktur yang dapat diselesaikan oleh persamaan keseimbangan gaya-gaya luar. Untuk struktur-struktur statis tak tentu dimana jumlah gaya reaksi yang diketahui melebihi jumlah persamaan keseimbangan gaya-gaya luar maka dibutuhkan pemrograman yang baru. Algoritma program juga berbeda-beda tergantung metode analisis struktur yang digunakan untuk analisis struktur tak tentu. Metode Cross, Slope deflection, Takabeya adalah contoh metode analisis struktu statis tak tentu.