6
2. TINJAUAN PUSTAKA
Pertanian Presisi
Pada kegiatan pertanian konvensional (conventional farming), seluruh bagian lahan mendapatkan perlakuan yang seragam. Laju aplikasi yang konstan tersebut seringkali didasarkan pada pengukuran sifat sampel tanah gabungan yang dikumpulkan untuk merepresentasikan karakteristik rata-rata dari keseluruhan lahan atau pengamatan serangan gulma pada luasan kecil diasumsikan telah mewakili bentuk serangan gulma secara menyeluruh di lahan. Dengan perlakuan demikian, maka kemungkinan yang dapat terjadi adalah adanya aplikasi yang berlebihan (over-application) dan aplikasi yang kurang (under-application). Sedangkan dengan precision farming, dapat dilakukan pengaturan masukan pertanian sesuai kebutuhan spesifik tempat tertentu pada setiap lokasi di dalam lahan. Perbedaan mendasar antara precision farming dan conventional farming yaitu masalah keragaman (variability). Keragaman merupakan gagasan kunci dari precision farming, khususnya penjabaran keragaman di dalam lahan. Keragaman harus dijabarkan paling tidak dalam tiga aspek yaitu spatial variability, temporal variability, dan predictive variability.
Precision Agriculture adalah suatu usaha pertanian dengan pendekatan dan teknologi yang memungkinkan perlakuan yang teliti (precise treatment) terhadap rantai agribisnis dari hulu (onfarm) sampai ke hilir (off farm). Paradigma pertanian yang memberikan perlakuan presisi dalam semua simpul-simpul rantai agribisnis adalah pertanian presisi (Seminar et al., 2011). Precision farming merupakan istilah yang digunakan untuk menjabarkan tujuan peningkatan efisiensi dalam pengelolaan pertanian (Blackmore, 1994). Definisi lain precision farming adalah pengelolaan setiap masukan produksi tanaman seperti pupuk, kapur, herbisida, insektisida, bibit, dan lain-lain pada suatu tempat tertentu untuk mengurangi pemborosan, meningkatkan keuntungan, dan menjaga kualitas lingkungan (Kuhar, 1997). Precision farming memungkinkan adanya peningkatan produktivitas, sementara biaya produksi menurun dan dampak lingkungan minimal (NRC 1997, dalam Shibusawa, 2001).
7 Menurut Blackmore (1994), tiga aspek dalam precision farming adalah: (1) menemukan apa yang terjadi dalam lahan, (2) memutuskan apa yang dilakukan untuk itu, dan (3) memberi perlakukan pada area tergantung pada keputusan yang dibuat.
Tanaman dan sifat tanah tidak hanya bervariasi terhadap jarak dan kedalaman, tetapi juga terhadap waktu. Beberapa sifat tanah adalah sangat stabil, berubah kecil terhadap waktu, seperti tekstur dan kandungan bahan organik tanah. Sifat-sifat tanah yang lain, seperti kadar nitrat (NO3-) dan kandungan lengas dapat berfluktuasi dengan cepat. Precision farming melakukan pengumpulan sampel tanah dan tanaman untuk mendapatkan informasi tentang bagaimana variasi kondisi di lahan.
Teknologi precision farming dapat digunakan dalam semua aspek siklus produksi tanaman dari operasi pratanam sampai pemanenan. Teknologi tersebut sekarang tersedia, atau akan segera ada, untuk memperbaiki pengujian tanah (soil testing), pengolahan tanah (tillage), penanaman (planting), pemupukan (fertilizing), pemberantasan gulma (spraying), pemanduan tanaman (crop scouting), dan pemanenan (harvesting).
Pelaksanaan precision farming merupakan suatu siklus yang berkesinambungan dari tahap perencanaan (planning season), tahap pertumbuhan (growing season), dan tahap pemanenan (harvesting season) sebagaimana ditampilkan pada Gambar 1.
8 Tahapan awal dari siklus pertanian presisi adalah analisa kesuburan tanah sedangkan pada sistem yang telah berjalan biasanya melalui proses untuk memonitor hasil panen di tiap lokasi sesuai koordinat pada GPS yang selanjutnya dibuat peta hasil. Penggabungan peta hasil dengan data hasil analisa tanah akan menghasilkan peta aplikasi (Application maps / Prescription maps). Peta aplikasi selanjutnya akan menjadi pemandu bagi VRT (Variable Rate Technology) untuk menentukan posisi mesin di dalam lahan dan menghubungkan posisi tersebut terhadap aplikasi yang harus dilakukan sejak pengolahan lahan, penanaman, pemupukan, proteksi tanaman, sampai pada kegiatan panen.
Beberapa teknologi yang dipakai untuk mengetahui keragaman kondisi lahan antara lain :
a. Yield Monitoring
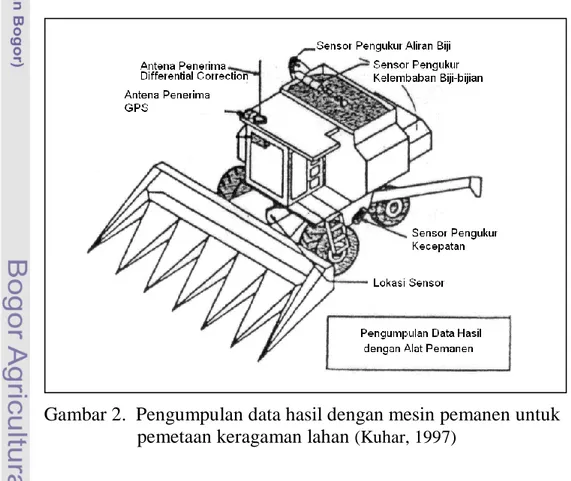
Pemantauan hasil (yield monitoring) pada pemanenan dilakukan melalui pengukuran produksi tanaman untuk koordinat geografi tertentu (Gambar 2), yang selanjutnya dapat dibuat peta hasil (yield map).
Gambar 2. Pengumpulan data hasil dengan mesin pemanen untuk pemetaan keragaman lahan (Kuhar, 1997)
9 b. Soil Testing dan Data Analysis
Pengumpulan sampel tanah secara langsung berdasar grid atau jenis tanah. Bahan sampel tanah dari setiap sel jaringan dikirim ke laboratorium pengujian tanah, selanjutnya diubah menjadi peta digital yang dipakai sebagai landasan bagi aplikasi pemupukan.
Pengambilan sampel berdasarkan grid memiliki dua metode yaitu grid center method dan grid cell method.
b.1. Metode Grid Center
Cara kerja grid center adalah dengan mengambil contoh tanah dalam ruang lingkaran radius 10 sampai dengan 30 feet (1 feet = 0.3048 m), selanjutnya dicampur untuk dianalisa di laboratorium.
Gambar 3. Metode pengambilan contoh tanah dengan metode grid center. (Kuhar, 1997).
b.2. Metode Grid Cell
Cara kerja metode grid cell adalah dengan mengambil sampel tanah secara acak pada beberapa tempat dalam setiap sel kemudian dicampur untuk dianalisa di laboratorium.
10 Gambar 4. Metode pengambilan contoh tanah dengan
metode grid cell . (Kuhar, 1997). c. Remote Sensing
Pengukuran jarak jauh menggunakan data hasil pemantauan jarak jauh. Gambar kondisi lahan dari satelit dan gambar dari photo udara memungkinkan petani untuk melihat kondisi tanaman pada keseluruhan lahan untuk menentukan manajemen perlakuan berdasarkan keragaman kondisi lahan yang terdapat pada citra satelit atau photo udara.
d. Pengukuran Langsung (real time)
Pengukuran langsung pada sensor base precision farming dengan menggunakan peralatan seperti : machine vision, soil doctor , chlorophyill meter, dan lain-lain.
Pada saat ini banyak produsen tanaman menerapkan site specific crop management (SSCM). Pemantauan hasil secara elektronis (electronic yield monitoring) seringkali menjadi tahap pertama dalam mengembangkan SSCM atau program precision farming. Data hasil tanaman yang presisi dapat digabungkan dengan data tanah dan lingkungan untuk memulai pelaksanaan pengembangan sistem pengelolaan tanaman secara presisi (precision crop management system).
Menurut Wolf dan Wood (1997), komponen teknologi dari precision farming adalah : (1) global positioning system (GPS), (2) yield monitoring, (3) digital soil fertility mapping, (4) crop scouting , dan (5) variable rate application (VRA).
11 Precision farming diprediksi pada geo-referencing, yaitu penandaan koordinat geografi untuk titik-titik pada permukaan bumi. Dengan global postioning system (GPS) dimungkinkan menandai koordinat geografi untuk beberapa objek atau titik dalam 5 cm, walaupun keakuratan dari aplikasi pertanian kisaran umumnya adalah 1 sampai 3 meter. GPS adalah sistem navigasi berdasarkan satelit yang dibuat dan dioperasikan oleh Departemen Pertahanan Amerika Serikat. GPS telah terbukti menjadi pilihan dalam postioning system untuk precision farming. Metode untuk meningkatkan keakuratan pengukuran posisi disebut koreksi diferensial atau DGPS (differential global postiong system). Perangkat keras yang diperlukan adalah GPS receiver, differential correction signal receiver, GPS antenna, differential correction antenna, dan computer/monitor interface.
Dalam praktek tradisional, pengujian tanah dan aplikasi pemupukan diarahkan pada ukuran yang relatif besar. Dengan precision farming, lahan dibagi dalam sel-sel jaringan (grid cells), yang mana lokasinya ditentukan dengan GPS. Pada saat ini, ukuran sel-sel jaringan yang paling umum adalah 2,5 dan 3,3 acre (1 acre = 0,4646 ha). Bahan sampel tanah dari setiap sel jaringan dikirim ke laboratorium pengujian tanah, selanjutnya diubah menjadi peta digital (digital map) yang digunakan untuk mengelola aplikasi pupuk (Kuhar, 1997).
Pengambilan sampel tanah dalam precision farming harus mendapat perhatian yang serius agar diperoleh analisa keragaman yang memadai dan pengambilan sampel yang efisien. Oleh karena itu diperlukan informasi spasial, diantaranya adalah stratifikasi geografis dan pengambilan sampel spasial yang sistematis. Metode pengambilan sampel tanah yang umum digunakan adalah pengambilan sampel berdasarkan grid (grid sampling) dan pengambilan sampel berdasarkan jenis tanah (soil type sampling). Pada pengambilan sampel berdasarkan grid, lahan dibagi menjadi sel-sel berbentuk bujur sangkar atau empat persegi panjang berukuran beberapa acre atau lebih kecil.
VRA adalah satu-satunya pendekatan manajemen untuk pemusatan perhatian di dalam lahan, yang memerlukan: 1) posisi yang tepat di lahan,
12 2) informasi yang tepat pada lokasi, dan 3) operasi yang tepat pada waktunya pada tempat yang membutuhkan, yang mana keragaman spasial (spatial variability) sebelumnya sudah dijabarkan, sehingga pengaturan masukan pertanian untuk kebutuhan tempat tertentu pada setiap lokasi di lahan dapat dilakukan. Peralatan (equipment) untuk melakukan variable-rate application disebut Variable-Rate Technology (VRT) (Kuhar, 1997). Metode dasar untuk implementasi VRA adalah:
a. Map-based VRA
Metode ini mengatur laju aplikasi (application rate) bahan berdasarkan informasi dalam peta elektronis dari sifat lahan. Sistem dengan metode ini harus mampu menentukan posisi mesin di dalam lahan dan menghubungkan posisi tersebut terhadap laju aplikasi yang diinginkan dengan membaca peta. Laju aplikasi didefinisikan sebagai volume dari bahan yang diaplikasikan per satuan luas atau berat dari bahan yang diaplikasikan per satuan luas.
Pada kecepatan jalan kendaraan aplikator penglihatan ke depan (looking ahead) pada peta untuk perubahan laju berikutnya menjadi fungsi pengontrol. Prosedur penglihatan ke depan diperlukan untuk menghitung waktu yang diperlukan peralatan untuk mengatur laju aliran bahan sesudah keputusan dibuat untuk merubah laju aplikasi. Komponen utama sistem kontrol otomatis pada map based VRA adalah :
- sensors
- postioning, pressure/flow, ground speed - controllers
- actuators b. Sensor-based VRA
Metode ini menggunakan data dari real-time sensors peta laju aplikasi untuk mengontrol secara elektronis operasi-operasi site-specific field. Real-time sensors beroperasi mengukur sifat tanah dan karakteristik tanaman, selanjutnya sistem kontrol VRA secara otomatis menggunakan data sensor untuk memadukan masukan seperti pupuk atau herbisida sesuai kebutuhan tanah dan tanaman. Sensor harus dapat memberikan aliran data yang
13 berkesinambungan pada pengontrol sehingga masukan dapat diubah-ubah mencakup luasan-luasan kecil di seluruh lahan.
Komponen utama sistem kontrol otomatis pada sensor-based VRA adalah :
- sensors – soil/plant - pressure flow
- ground speed controllers - actuators
Sampai saat ini, aplikasi VRT telah banyak dikembangkan terutama untuk pupuk dan herbisida, namun demikian operasi-operasi lahan yang lain juga dapat menggunakan VRT, yaitu pengolahan tanah dan penyiapan lahan, penanaman, aplikasi pupuk kandang, pemberantasan hama dan penyakit, sistem air dan irigasi, diagnosa tanaman, dan pemanenan (Kuhar, 1997).
b.1. Pemupukan
Aplikasi VRT pada pemupukan telah banyak dikembangkan, contoh yang tersedia secara komersial untuk sistem dengan kontrol sensor based adalah Soil Doctor sebagai produksi dari Crop Technology, Inc., Houston, TX. Soil Doctor dirancang untuk mengelola pupuk dan bahan kimia pertanian secara otomatis dengan baik. Alat ini menggunakan 2 atau 3 coulter yang berhubungan dengan tanah yang berfungsi sebagai sebuah susunan sensor tunggal. b.2. Pemberantasan hama (pesticide application)
Mengidentifikasi gulma yang sedang tumbuh di tengah-tengah tanaman adalah sesuatu yang sangat sulit. Sensor yang dapat menggunakan bentuk dan warna daun untuk mengenal gulma dari tanaman akan membantu membawa VRA pada penanganan gulma (Kuhar, 1997). Sistem atau sensor yang mengenal gulma dengan VRT yang membawa bermacam pestisida, akan memungkinkan penanganan gulma dengan baik. Jika gulma diketahui lokasinya dan teridentifikasi, maka bahan kimia yang sesuai dapat diaplikasikan untuk itu.
14 b.3. Diagnosa tanaman (crop diagnosis)
Penyakit atau kekurangan hara mempengaruhi pertumbuhan tanaman dan hasil, seringkali ditunjukkan melalui pewarnaan daun yang luar biasa atau tidak teratur, pola kehitaman pada daun-daun tanaman. Sistem mesin visi (machine vision systems) memungkinkan pemantauan penyakit tanaman atau kekurangan hara untuk keperluan perlakuan yang tepat.
Gulma
Gulma adalah tumbuhan penganggu (bukan tumbuhan yang sengaja dibudidayakan) yang tumbuh pada lahan tanaman budidaya atau tumbuhan yang tumbuh disekitar tanaman pokok (tanaman yang sengaja ditanam) atau semua tumbuhan yang tumbuh pada tempat (area) yang tidak diinginkan oleh si penanam sehingga kehadirannya dapat merugikan tanaman lain yang ada di dekat atau disekitar tanaman pokok tersebut. Pendapat para ahli gulma yang lain ada yang mengatakan bahwa gulma disebut juga sebagai tumbuhan pengganggu atau tumbuhan yang belum diketahui manfaatnya, tidak diinginkan dan menimbulkan kerugian (Martin, 2006).
Kehadiran gulma pada lahan pertanian atau pada lahan perkebunan dapat menimbulkan berbagai masalah antara lain :
- Terjadinya kompetisi dengan tanaman pokok (tanaman budidaya) dalam hal penyerapan zat makanan atau unsur-unsur hara di dalam tanah, penangkapan cahaya, penyerapan air dan ruang tempat tumbuh.
- Sebagian besar tumbuhan gulma dapat mengeluarkan zat atau cairan yang bersifat toksin (racun), berupa senyawa kimia yang dapat mengganggu dan menghambat pertumbuhan tanaman lain di sekitarnya. Peristiwa tersebut dikenal dengan istilah allelopati.
- Sebagai tempat hidup atau inang, maupun tempat berlindung hewan-hewan kecil, insekta dan hama sehingga memungkinkan hewan-hewan tersebut dapat berkembang biak dengan baik. Akibatnya hama tersebut akan menyerang dan memakan tanaman pokok ataupun tanaman budidaya.
15 - Dapat menurunkan kualitas produksi dari tanaman budidaya, misalnya dengan
tercampurnya biji-biji dari gulma yang kecil dengan biji tanaman budidaya. Sifat-sifat Gulma
Gulma merupakan tumbuhan yang mempunyai sifat dan ciri khas tertentu, yang umumnya berbeda dengan tanaman pokok atau tanaman budidaya. Sifat-sifat dari gulma tersebut antara lain:
- Gulma mudah tumbuh pada setiap tempat atau daerah yang berbeda-beda, mulai dari tempat yang miskin nutrisi sampai tempat yang kaya nutrisi.
- Gulma dapat bertahan hidup dan tumbuh pada daerah kering sampai daerah yang lembab.
- Memiliki kemampuan untuk mengadakan regenerasi atau perkembangbiakan memperbanyak diri besar sekali, khususnya pada gulma perennial. Gulma perennial (gulma yang hidupnya menahun) dapat pula menyebar luas dengan cara perkembangbiakan vegetatif disamping secara generatif.
- Gulma juga dapat menghasilkan biji dalam jumlah yang sangat banyak. Gulma dapat dibedakan menjadi beberapa golongan atau kelompok berdasarkan bentuk daun, daerah tempat hidup (habitat), daur atau siklus hidup, sifat botani dan morfologi, serta cara perkembangbiakan.
a. Penggolongan berdasarkan bentuk daun
Penggolongan berdasarkan bentuk daun ini berpatokan atas lebar atau sempitnya daun. Gulma berdaun lebar yaitu apabila lebar dari helaian daunnya lebih dari setengah ukuran panjangnya. Helaian daun tersebut dapat berbentuk oval, bulat, segita, lonjong, membulat atau seperti bentuk ginjal. Pertulangan daun (nervatio) dari golongan ini umumnya bentuk menyirip. Golongan gulma berdaun lebar ini umumnya didominasi oleh kelompok tumbuhan dari klas Dicotyledoneae. Sedangkan gulma berdaun sempit yaitu apabila helaian daun atau laminanya berbentuk memanjang dan ukuran lebarnya helaian daun kecil atau sempit. Helaian daun dari golongan ini umumnya terdiri dari kelampok daun yang berbentuk pita, linearis, jarum dan yang berbentuk panjang-panjang. Pertulangan daun dari golongan ini
16 umumnya berbentuk lurus-lurus atau linearis yang umumnya didominasi oleh kelompok tumbuhan dari klas Monocotyledoneae.
a.1. Gulma berdaun lebar
Tumbuhan ini mempunyai bentuk daun yang lebar dan luas dan umumnya:
- nervatio (pertulangan daun) menyirip - dari kelompok Dicotyledoneae
- bentuk helaian membulat, bulat, oval, lonjong, segitiga, bentuk ginjal. Contoh:
- Amaranthus spinosus L.
- Ageratum conyzoides (bandotan) - Portulaca oleracea
- Melastoma malabathricum - Eupatorium odoratum - Euphorbia hirta - Centella asiatica. a.2. Gulma berdaun sempit
Tumbuhan ini mempunyai bentuk daun sempit dan memanjang; - nervatio (pertulangan daun) linearis atau garis-garis memanjang. - dari kelompok monocotyledoneae.
- bentuk daun memanjang seperti pita, jarum, garis dll. contoh:
- Leersea hexandra - Sprobolus poiretii - Cyperus rotundus - Imperata cylindrica b. Penggolongan gulma berdasarkan habitat
Berdasarkan habitat atau tempat hidup gulma dapat dikelompokkan menjadi beberapa golongan yaitu:
17 b.1. Gulma darat (terristerial weed).
Gulma darat adalah semua tumbuhan gulma yang hidup dan tumbuhnya di darat, seperti: Imperata cylindrical dan Melastoma malabathricum. Gulma darat dapat dibagi berdasarkan lahan atau arealnya, antara lain :
- Gulma sawah tanaman palawija , contoh : Portulaca oleracea dan Cyperus rotundus.
- Gulma ladang, contoh : Leersea hexandra dan Imperata cylindrical.
- Gulma kebun, contoh : Ageratum conyzoides dan Stachytarpita sp.
- Gulma hutan, contoh : Melastoma malabathricum , Crotalaria sp. - Gulma Padang rumput, contoh : Sprobolus poiretii dan
Andropogon.
b.2. Gulma air
Gulma air adalah tumbuhan gulma yang hidup, tumbuh dan berkembang biaknya di dalam air, di daerah perairan atau ditempat yang basah dan tergenang, Contoh dari gulma ini adalah: Eichornia crassipes, Hydrilla verticilata, Pistia stratiotes, dan Nymphaea sp. c. Penggolongan berdasarkan daur hidup
Berdasarkan daur hidup (siklus hidup), maka gulma dapat dikelompokkan pada beberapa golongan yaitu.
c.1. Annual (semusim)
Gulma semusim adalah tumbuhan gulma yang mempunyai daur hidup hanya satu musim atau satu tahunan, mulai dari tumbuh, anakan, dewasa dan berkembang biak. Contoh gulma semusim adalah: Ageratum conyzoides, dan Stachytarpita sp.
c.2. Biennial (dua musim)
Gulma dua musim adalah tumbuhan gulma yang mempunyai daur hidup mulai dari tumbuh ,anakan,dewasa dan berkembang
18 biak selama dua musim tetapi kurang dari dua tahun. Contoh gulma ini adalah: Lactuca canadensis L.
c.3. Perinnial (gulma musiman atau tahunan)
Gulma musiman adalah tumbuhan gulma yang dapat hidup lebih dari dua tahun atau lama berkelanjutan bila kondisi memungkinkan. Contoh gulma ini adalah kebanyakan dari klas monocotyledoneae seperti; Cyperus rotundus dan Imperata cylindrica.
d. Penggolongan berdasarkan sifat morfologi
Berdasarkan sifat morfologi maka gulma dapat dikelompokkan menjadi tiga golongan yaitu:
d.1. Golongan rumput-rumputan (grasses)
Yaitu semua tumbuhan gulma yang berasal dari keluarga Gramineae (Poaceae). Gulma ini ukurannya bervariasi, tumbuh bisa tegak maupun menjalar , hidup semusim atau tahunan. Ciri-ciri kelompok gulma yang tergolong kedalam keluarga rumput ini adalah batangnya umumnya mempunyai ruas-ruas dan buku. Jarak masing-masing ruas (internodus) bisa sama dan bisa pula berbeda dan bahkan ada yang cukup panjang, yang tidak sebanding dengan buku , batangnya ini ada yang menyebut dengan culm. Ciri lain dari kelompok ini adalah daunnya yang tidak mempunyai tangkai daun (ptiolus) tapi hanya mempunya pelepah/ upih (vagina) dan helaian daun (lamina).
Contoh dari gulma ini banyak sekali dan ditemukan pada berbagai tempat, baik di areal tanaman budidaya maupun di daerah yang terbuka, misalnya; Eleusine indica, Imperata cylindrical, Panicum repens, Paspalum conjugatum, Axonopus compressus dan Leersea hexandra.
d.2. Golongan Teki-tekian (sedges)
Gulma yang termasuk kedalam kelompok gulma ini adalah dari keluarga Cyperaceae. Ciri khas dari kelompok teki ini adalah batangnya yang berbentuk segitiga, dan pada sebagian besar sistim perakarannya terdiri dari akar rimpang (rhizome) dan umbi (tuber).
19 Contoh gulma ini adalah: Cyperus rotundus dan Cyperus irinaria. d.3. Golongan gulma berdaun lebar (broad leaf weed)
Kelompok ini terdiri dari gulma yang berdaun lebar yang umumnya terdiri dari klas Dicotyledoneae, pertulangan daun umunya menyirip, misalnya: Ageratum conyzoides, Eupatorium odoratum, Melastoma malabathricum dan Phylanthus niruri.
e. Penggolongan berdasarkan sifat botani
Berdasarkan sifat-sifat botaninya maka gulma dapat dikelompokkan menjadi beberapa golongan yaitu:
e.1 Golongan gulma Dicotyledoneae (berkeping dua)
Dicotyledoneae adalah semua tumbuhan gulma yang berasal dari klas Dikotiledon, seperti: Crotalaria sp, Melastoma malabathricum, Phyllanthus niruri dan Lantana camara.
e.2. Golongan gulma Monocotyledoneae (berkeping satu)
Monocotyledoneae adalah semua tumbuhan gulma yang berasal dari klas Monokotil seperti: Imperata cylindrical, Panicum repens, Dactyloptenium sp., Eragrostis amabilis, Cynodon dactylon,dan cyperus rotundus.
e.3. Golongan gulma Pteridophyta (pakis-pakisan)
Pteridophyta yaitu semua gulma yang berasal dari kelompok pakis-pakisan, contoh : Neprolepsis bisserata.
f. Penggolongan berdasarkan kesamaan respon terhadap herbisida
Berdasarkan kesamaan respon terhadap herbisida, gulma dibedakan menjadi tiga golongan yaitu gulma rumput-rumputan (grasses), gulma berdaun lebar (broadleave), dan gulma teki (sedges). Gulma rumputan atau disebut sebagai gulma berdaun pita merupakan gulma dari kelompok graminae yang memiliki ciri-ciri tulang daun sejajar tulang daun utama, panjang dan lebar daun jelas berbeda. Contoh gulma golongan rumput antara lain Cynodon dactylon, Axonopus compressus, Paspalum conjugatum, dan masih banyak lagi. Gulma golongan teki merupakan gulma dari famili Cyperaceae dengan ciri utama penampang batangnya
20 segitiga. Gulma berdaun lebar sebagian besar merupakan dikotil tetapi ada beberapa golongan monokotil, seperti eceng gondok dan lidah buaya.
Pengendalian Gulma dengan Herbisida
Pemberantasan gulma dapat dilakukan dengan cara memperhatikan beberapa faktor berikut :
- jenis gulma
- kepadatan serangan gulma
- metode pemberantasan yang digunakan (mekanis, biologis atau kimia). Keberhasilan pengendalian gulma merupakan salah satu faktor penentu tercapainya tingkat hasil budidaya tanaman. Gulma dapat dikendalikan melalui berbagai aturan dan karantina; secara biologi dengan menggunakan organisme hidup; secara fisik dengan membakar dan menggenangi, melalui budi daya dengan pergiliran tanaman, peningkatan daya saing dan penggunaan mulsa; secara mekanis dengan mencabut, membabat, menginjak, menyiang dengan tangan, dan mengolah tanah dengan alat mekanis bermesin dan nonmesin, secara kimiawi menggunakan herbisida.
Herbisida memiliki efektivitas yang beragam dalam pemberantasan gulma. Berdasarkan cara kerjanya, herbisida kontak mematikan bagian tumbuhan yang terkena herbisida, dan herbisida sistemik mematikan setelah diserap dan ditranslokasikan ke seluruh bagian gulma. Menurut jenis gulma yang akan ditangani terdapat herbisida selektif yang mematikan gulma tertentu atau spektrum sempit, dan herbisida nonselektif yang mematikan banyak jenis gulma atau spektrum lebar.
Bahan aktif herbisida yang penting untuk pertanaman jagung adalah glifosat, paraquat, 2,4-D, ametrin, dikamba, atrazin, pendimetalin, metolaklor, dan sianazin. Glifosat yang disemprotkan ke daun efektif mengendalikan gulma rumputan tahunan dan gulma berdaun lebar tahunan, gulma rumput setahun, dan gulma berdaun lebar. Senyawa glifosat sangat mobil, ditranslokasikan ke seluruh bagian tanaman ketika diaplikasi pada daun, dan cepat terurai dalam tanah. Gejala keracunan berkembang lambat dan terlihat 1-3 minggu setelah aplikasi. Herbisida pascatumbuh yang cukup luas
21 penggunaannya untuk mengendalikan gulma pada pertanaman jagung adalah paraquat (1,1- dimethyl-4,4 bypiridinium) yang merupakan herbisida kontak nonselektif (Fadhly, 2005).
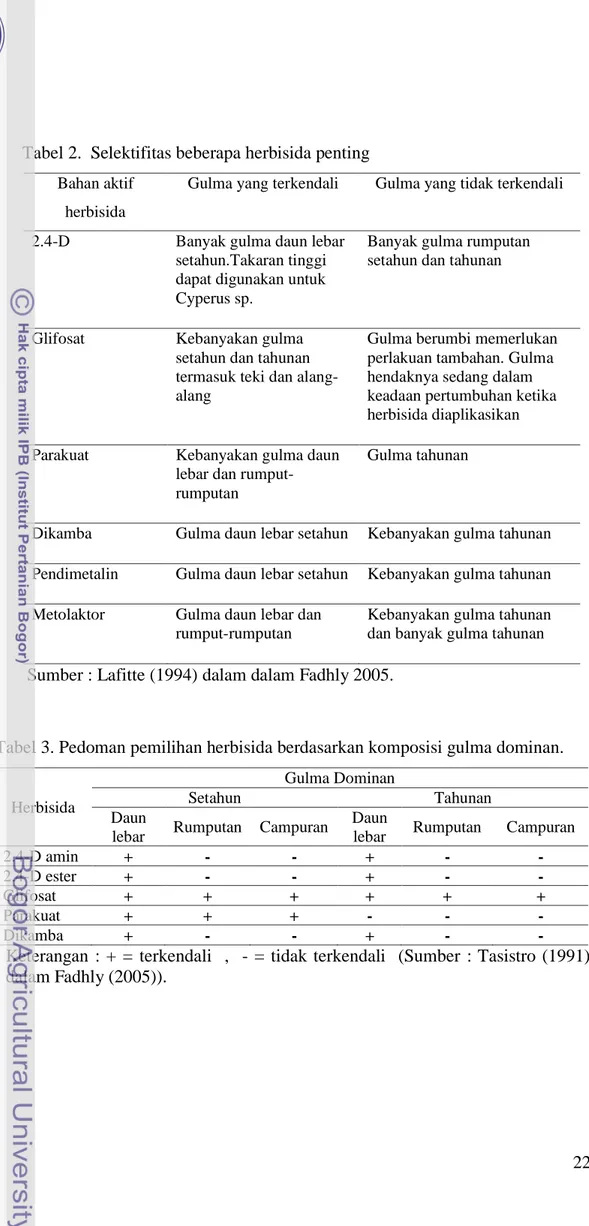
Populasi gulma mudah berubah karena perubahan tanaman yang diusahakan dan herbisida yang digunakan dari satu musim ke musim lainnya. Perubahan jenis gulma dapat berimplikasi pada perlunya perubahan herbisida yang digunakan untuk pengendalian. Pertimbangan utama pemilihan herbisida adalah kandungan bahan aktif untuk membunuh gulma yang tumbuh di areal pertanaman. Jenis bahan aktif dan takaran herbisida untuk mengendalikan gulma disajikan dalam Tabel 1. Sedangkan Tabel 2 menunjukkan selektivitas daya bunuh herbisida pada tanaman pokok jagung. Takaran herbisida meningkat jika kondisi penggunaannya kurang mendukung, misalnya hujan turun setelah aplikasi atau daun gulma berlapis lilin.
Dalam hal ini perlu digunakan perekat/perata (surfactant) dengan takaran 0,1-0,5% volume/volume (Tasistro 1991 dalam Fadhly 2005). Tabel 3 dan 4 menunjukkan jenis gulma yang dapat dikendalikan oleh herbisida tertentu dan waktu penggunaannya. Glifosat efektif mengendalikan gulma rumputan, dan pencampuran glifosat dengan 2,4-D atau dengan dikamba diperlukan agar gulma berdaun lebar juga dapat dikendalikan. Kehadiran gulma tertentu pada pertanaman jagung mengharuskan pencampuran herbisida tertentu, misalnya 2,4-D + dikamba atau 2,4-D + paraquat.
Tabel 1. Jenis dan takaran herbisida untuk pengendalian gulma.
Herbisida Tunggal Campuran dalam tangki
Bahan aktif Dosis (kg ba/ha) Bahan aktif Dosis (kg ba/ha) 2.4-D amin 0.70 – 1.20 2.4-D amin + Glifosat (0.7-1.2)+(0.36-0.63) 2.4-D ester 0.40 – 0.80 2.4-D ester + Glifosat (0.4-0.8)+(0.36-0.63) Glifosat 0.54 – 0.90 Dikamba + Glifosat (0.24-0.36)+(0.36-0.63) Parakuat 0.20 – 0.40 2.4-D amin + Dikamba (0.7-1.2)+(0.24-0.36) Dikamba 0.24 – 0.36
22 Tabel 2. Selektifitas beberapa herbisida penting
Bahan aktif herbisida
Gulma yang terkendali Gulma yang tidak terkendali
2.4-D Banyak gulma daun lebar setahun.Takaran tinggi dapat digunakan untuk Cyperus sp.
Banyak gulma rumputan setahun dan tahunan
Glifosat Kebanyakan gulma setahun dan tahunan termasuk teki dan alang-alang
Gulma berumbi memerlukan perlakuan tambahan. Gulma hendaknya sedang dalam keadaan pertumbuhan ketika herbisida diaplikasikan Parakuat Kebanyakan gulma daun
lebar dan rumput-rumputan
Gulma tahunan
Dikamba Gulma daun lebar setahun Kebanyakan gulma tahunan Pendimetalin Gulma daun lebar setahun Kebanyakan gulma tahunan Metolaktor Gulma daun lebar dan
rumput-rumputan
Kebanyakan gulma tahunan dan banyak gulma tahunan Sumber : Lafitte (1994) dalam dalam Fadhly 2005.
Tabel 3. Pedoman pemilihan herbisida berdasarkan komposisi gulma dominan.
Herbisida
Gulma Dominan
Setahun Tahunan
Daun
lebar Rumputan Campuran
Daun
lebar Rumputan Campuran
2.4-D amin + - - + -
-2.4-D ester + - - + -
-Glifosat + + + + + +
Parakuat + + + - -
-Dikamba + - - + -
-Keterangan : + = terkendali , - = tidak terkendali (Sumber : Tasistro (1991) dalam Fadhly (2005)).
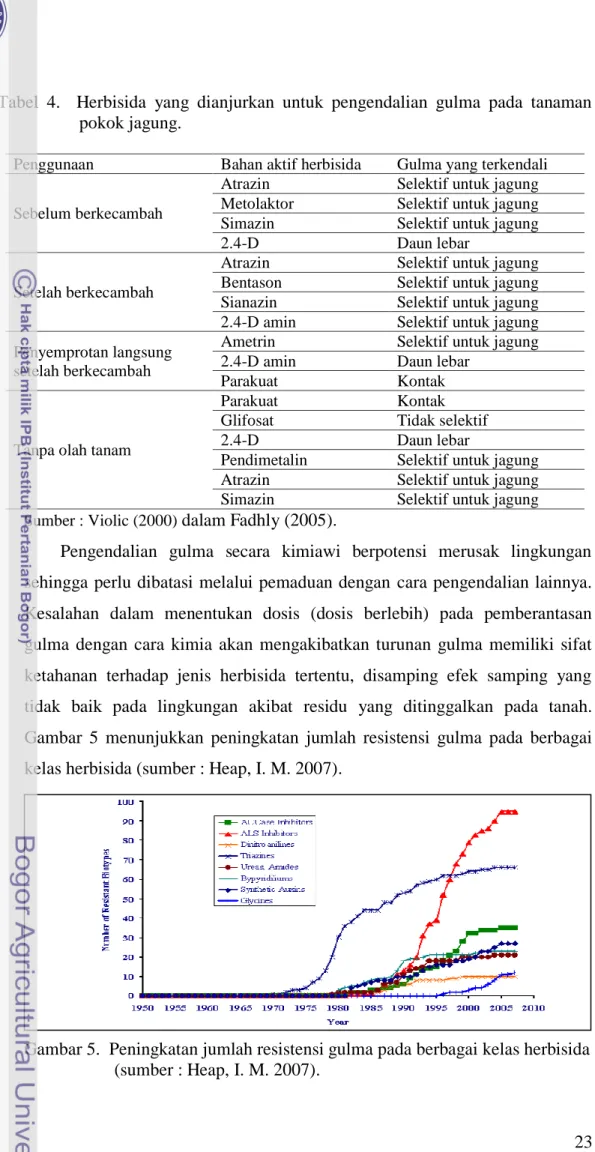
23 Tabel 4. Herbisida yang dianjurkan untuk pengendalian gulma pada tanaman
pokok jagung.
Penggunaan Bahan aktif herbisida Gulma yang terkendali
Sebelum berkecambah
Atrazin Selektif untuk jagung
Metolaktor Selektif untuk jagung
Simazin Selektif untuk jagung
2.4-D Daun lebar
Setelah berkecambah
Atrazin Selektif untuk jagung
Bentason Selektif untuk jagung Sianazin Selektif untuk jagung 2.4-D amin Selektif untuk jagung Penyemprotan langsung
setelah berkecambah
Ametrin Selektif untuk jagung
2.4-D amin Daun lebar
Parakuat Kontak
Tanpa olah tanam
Parakuat Kontak
Glifosat Tidak selektif
2.4-D Daun lebar
Pendimetalin Selektif untuk jagung
Atrazin Selektif untuk jagung
Simazin Selektif untuk jagung
Sumber : Violic (2000) dalam Fadhly (2005).
Pengendalian gulma secara kimiawi berpotensi merusak lingkungan sehingga perlu dibatasi melalui pemaduan dengan cara pengendalian lainnya. Kesalahan dalam menentukan dosis (dosis berlebih) pada pemberantasan gulma dengan cara kimia akan mengakibatkan turunan gulma memiliki sifat ketahanan terhadap jenis herbisida tertentu, disamping efek samping yang tidak baik pada lingkungan akibat residu yang ditinggalkan pada tanah. Gambar 5 menunjukkan peningkatan jumlah resistensi gulma pada berbagai kelas herbisida (sumber : Heap, I. M. 2007).
Gambar 5. Peningkatan jumlah resistensi gulma pada berbagai kelas herbisida (sumber : Heap, I. M. 2007).
24 Sistem Multi Agen
Menurut Nwana (Nwana, 1996. dalam Romi, 2003), konsep agen sudah dikenal lama dalam bidang AI (Artificial Intelligence), tepatnya dikenalkan oleh seorang peneliti bernama Carl Hewitt (Hewitt, 1977. dalam Romi, 2003) dengan concurrent actor modelnya pada tahun 1977. Dalam modelnya Hewitt mengemukakan teori tentang suatu obyek yang yang disebut actor, yang mempunyai karakteristik menguasai dirinya sendiri, interaktif, dan bisa merespon pesan yang datang dari lain obyek sejenis. Dari berbagai penelitian berhubungan dengan hal diatas, kemudian lahirlah cabang ilmu besar yang merupakan turunan dari AI yaitu Distributed Artificial Intelligence (DAI), yang antara lain membawahi bidang penelitian, Distributed Problem Solving (DPS), Parallel Artificial Intelligence (PAI), dan Multi Agent System (MAS).
Di dalam kamus Webster’s New World Dictionary (Guralnik, 1983. dalam Romi, 2003), agen didefinisikan sebagai: A person or thing that acts or is capable of acting or is empowered to act, for another. Caglayan mendefinisikan agen sebagai: Suatu entitas software komputer yang memungkinkan user (pengguna) untuk mendelegasikan tugas kepadanya secara mandiri (autonomously). Kemudian beberapa peneliti lain menambahkan satu point lagi, yaitu bahwa agen harus bisa berjalan dalam kerangka lingkungan jaringan (network environment) (Brenner et. al., 1998. dalam Romi, 2003). Definisi agen dari para peneliti lain pada hakekatnya adalah senada, meskipun ada yang menambahkan atribut dan karakteristik agen ke dalam definisinya. Secara lengkap definisi agen dan komparasinya, dirangkumkan oleh Franklin dalam makalahnya (Franklin et. al., 1996. dalam Romi, 2003).
1. Interaksi Antar Agen dalam Sistem Multi Agen.
Ada 4 jenis interaksi antar agent dalam kerangka MAS, yaitu:
- Cooperation : Menampakkan tujuan dan knowledge yang dimiliki ke agen lain. Pada interaksi cooperation, dua agen tersebut memiliki tujuan yang sama.
25 - Coordination : Menampakkan tujuan dan knowledge yang dimiliki ke agen lain. Pada interaksi coordination, dua agen tersebut memiliki tujuan yang berbeda.
- Loose Competition: Menampakkan tujuan dan menyembunyikan knowledge yang dimiliki ke agen lain.
- Strict Competition : Tidak menampakkan tujuan maupun knowledge yang dimiliki ke agen lain.
2. Karakteristik dan Atribut Agen a. Autonomy
Agen dapat melakukan tugas secara mandiri dan tidak dipengaruhi secara langsung oleh user, agen lain ataupun oleh lingkungan (environment). Untuk mencapai tujuan dalam melakukan tugasnya secara mandiri, agen harus memiliki kemampuan kontrol terhadap setiap aksi yang mereka perbuat, baik aksi keluar maupun kedalam (Woolridge et. al., 1995. dalam Romi, 2003.). Dan satu hal penting lagi yang mendukung autonomy adalah masalah intelegensi (intelligence) dari agen.
b. Intelligence, Reasoning, dan Learning
Setiap agen harus mempunyai standar minimum untuk bisa disebut agen, yaitu intelegensi (intelligence). Dalam konsep intelligence, ada tiga komponen yang harus dimiliki: internal knowledge base, kemampuan reasoning berdasar pada knowledge base yang dimiliki, dan kemampuan learning untuk beradaptasi dalam perubahan lingkungan.
c. Mobility
Khusus untuk mobile agen, dia harus memiliki kemampuan yang merupakan karakteristik tertinggi yang dia miliki yaitu mobilitas. Berkebalikan dari hal tersebut adalah stationary agent. Bagaimanapun juga keduanya tetap harus memiliki kemampuan untuk mengirim pesan dan berkomunikasi dengan agen lain.
d. Delegation
Sesuai dengan namanya dan seperti yang sudah kita bahas pada bagian definisi Agen, agen bergerak dalam kerangka menjalankan tugas yang
26 diperintahkan oleh user. Fenomena pendelegasian (delegation) ini adalah karakteristik utama suatu program disebut agen.
e. Reactivity
Karakteristik agen yang lain adalah kemampuan untuk bisa cepat beradaptasi dengan adanya perubahan informasi yang ada dalam suatu lingkungan (enviornment). Lingkungan itu bisa mencakup: agen lain, user, adanya informasi dari luar, dan sebagainya.
f. Proactivity dan Goal-Oriented
Sifat proactivity boleh dikata adalah kelanjutan dari sifat reactivity. Agen tidak hanya dituntut bisa beradaptasi terhadap perubahan lingkungan, tetapi juga harus mengambil inisiatif langkah penyelesaian apa yang harus diambil. Untuk itu agen harus didesain memiliki tujuan (goal) yang jelas, dan selalu berorientasi kepada tujuan yang diembannya (goal-oriented).
g. Communication and Coordination Capability
Agen harus memiliki kemampuan berkomunikasi dengan user dan juga agen lain. Masalah komunikasi dengan user adalah masuk ke masalah user interface dan perangkatnya, sedangkan masalah komunikasi, koordinasi, dan kolaborasi dengan agent lain adalah masalah sentral penelitian multi agent system (MAS).
3. Klasifikasi Agen
Teknik klasifikasi agen menurut karakteristik dipelopori oleh Nwana (Nwana, 1996. dalam Romi, 2003.). Menurut Nwana, agen bisa diklasifikasikan menjadi tujuh berdasarkan pada karakteristiknya, yaitu a. Collaborative Agent
Agent yang memiliki kemampuan melakukan kolaborasi dan koordinasi dengan agen lain dalam kerangka Multi Agent System (MAS). b. Interface Agent
Agen yang memiliki kemampuan untuk berkolaborasi dengan user, melakukan fungsi monitoring dan learning untuk memenuhi kebutuhan user.
27 c. Mobile Agent
Agen yang memiliki kemampuan untuk bergerak dari suatu tempat ke tempat lain, dan secara mandiri melakukan tugas ditempat barunya tersebut, dalam lingkungan jaringan komputer.
d. Information dan Internet Agent
Agen yang memiliki kemampuan untuk menjelajah internet untuk melakukan pencarian, pemfilteran, dan penyajian informasi untuk user, secara mandiri. Atau dengan kata lain, mengelola informasi yang ada di dalam jaringan internet.
e. Reactive Agent
Agen yang memiliki kemampuan untuk bisa cepat beradaptasi dengan lingkungan baru dimana dia berada.
f. Hybrid Agent
Agen yang memiliki katakteristik yang merupakan gabungan dari karakteristik yang sudah disebutkan sebelumnya adalah masuk ke dalam agen hybrid.
g. Heterogeneous Agent System
Dalam lingkungan Multi Agent System (MAS), apabila terdapat dua atau lebih agen hybrid yang memiliki perbedaan kemampuan dan karakteristik, maka sistem MAS tersebut kita sebut dengan heterogeneous agent system.
Penentuan agen-agen yang dapat berjalan simultan tidak terlepas dari definisi agen berdasarkan kapabilitasnya, yaitu Basic Agent, Passive Agent, Active Agent dan Peer Agent.
Tabel 5. Kapabilitas agen
Capabilities Basic Agent Passive Agent Active Agent Peer Agent Receives assertions √ √ √ √ Receives queris √ √ Sends assertions √ √ √ Sends queries √ √
28 Beberapa software yang biasa digunakan dalam pembuatan sistem multi agen diantaranya INGENIAS development kit (IDK), Promotheus development tools, Forel Intelligent Agent Technology (FIAT), Open Cybele dan Java Agen Development (JADE).
INGENIAS Development Kit (IDK) adalah kerangka kerja untuk keperluan analisis desain dan implementasi sistem multi agen. Metode Prometheus adalah metode untuk membangun sistem perangkat lunak berbasis agen yang menentukan spesifikasi proses detail, desain, implementasi dan uji kinerja . Forel Intelligent Agent adalah sebuah set perangkat lunak terintegrasi yang memiliki kemampuan untuk mengubah permasalahan kompleks menjadi perintah pengendalian sederhana, dimana transformasi dilakukan dengan pembelajaran mandiri dan menghasilkan aturan-aturan optimal dan set fitur peta untuk pengambilan keputusan. OpenCybele menggunakan pendekatan yang berbeda terhadap agen. Agen didefinisikan sebagai sekelompok kegiatan yang berbagi data, thread, dan struktur eksekusi secara simultan.
Pemrosesan Paralel
Pemrosesan paralel adalah penggunaan mesin komputer paralel untuk memecahkan satu unit problem komputasi dengan tujuan untuk mempersingkat waktu pengolahan. Proses paralelisasi dilakukan dengan cara membagi data ke beberapa memori terdistribusi dimana bagian-bagian citra akan difilterisasi secara paralel Tiap-tiap prosesor melakukan komputasi sesuai dengan tugas yang telah ditentukan. Berdasarkan jumlah aliran instruksi dan aliran datanya, Michael J. Flynn pada tahun 1966 mengelompokkan komputer digital menjadi empat golongan besar (Hwa, 1985 dalam Purbasari, 2002).
Aliran instruksi (instruction stream) adalah urutan instruksi yang dieksekusi oleh sistem komputer, sedangkan aliran data (data stream) adalah urutan data yang diolah termasuk data masukan, bagian dari data, maupun data sementara yang dipanggil atau digunakan oleh aliran instruksi.
29 1. Komputer SISD (Single Instruction stream-Single Data stream)
Pada komputer jenis ini semua instruksi dikerjakan secara berurutan satu demi satu, tetapi juga dimungkinkan adanya overlapping dalam eksekusi setiap bagian instruksi (pipelining). Pada umumnya komputer SISD berupa komputer yang terdiri atas satu buah pemroses (single processor). Namun komputer SISD juga mungkin memiliki lebih dari satu unit fungsional (modul memori, unit pemroses, dan lain-lain), selama seluruh unit fungsional tersebut berada dalam kendali sebuah unit pengendali.
2. Komputer SIMD (Single Instruction stream-Multiple Data stream)
Pada komputer SIMD terdapat lebih dari satu elemen pemrosesan yang dikendalikan oleh sebuah unit pengendali yang sama. Seluruh elemen pemrosesan menerima dan menjalankan instruksi yang sama yang dikirimkan unit pengendali, namun melakukan operasi terhadap himpunan data yang berbeda yang berasal dari aliran data yang berbeda pula.
3. Komputer MISD (Multiple Instruction stream-Single Data stream)
Komputer jenis ini memiliki sejumlah unit pemroses yang masing-masing menerima dan mengoperasikan instruksi yang berbeda terhadap aliran data yang sama, karena setiap unit pemroses memiliki unit pengendali yang berbeda. Keluaran dari satu pemroses menjadi masukan bagi pemroses berikutnya. Belum ada perwujudan nyata dari komputer jenis ini kecuali dalam bentuk prototipe untuk penelitian.
4. Komputer MIMD (Multiple Instruction stream-Multiple Data stream)
Pada sistem komputer MIMD murni terdapat interaksi di antara beberapa pemroses. Hal ini disebabkan seluruh aliran dari dan ke memori berasal dari space data yang sama bagi semua pemroses. Komputer MIMD bersifat tightly coupled jika tingkat interaksi antara pemroses tinggi, dan disebut loosely coupled jika tingkat interaksi antara pemroses rendah.
Parameter yang sangat penting untuk mengukur kinerja suatu program paralel adalah waktu eksekusi dan speed up. Waktu eksekusi dapat diartikan sebagai waktu berlangsungnya (running) program paralel pada suatu arsitektur komputer
30 paralel. Waktu eksekusi sekuensial didefinisikan sebagai waktu running algoritma yang sama yang dieksekusi oleh satu prosesor. Speed up dari suatu program paralel adalah waktu eksekusi sekuensial dibagi dengan waktu eksekusi paralel. Speed up dapat didefinisikan sebagai berikut :
( ) ( )
( ) ( 1 )
keterangan : S(n) = speed up,
T(1) = waktu eksekusi operasi pada sistem satu prosesor, T(n) = waktu eksekusi pada sistem n prosesor.
Nilai efisiensi sistem dengan n prosesor didefinisikan sebagai berikut : ( ) ( ) ( )
( ) ( 2 )
keterangan : E(n) = efisiensi S(n) = speed up
T(1) = waktu eksekusi operasi pada sistem satu prosesor T(n) = waktu eksekusi pada sistem n prosesor
n = jumlah prosesor
Menurut hukum Amdahl’s salah satu hal yang dapat mengurangi speed up dari program paralel adalah bagian kode yang dieksekusi secara sekuensial. Apabila terdapat operasi sejumlah n, masing-masing membutuhkan satu unit waktu untuk eksekusi. Diasumsikan juga terdapat fraksi f dari operasi tersebut yang harus dibentuk secara sekuensial (f antara 0 -1). Maka, sejumlah fn operasi harus dilaksanakan secara sekuensial dan sisanya, (1-f)n, operasi dapat diparalelkan. Jika program tersebut dikerjakan pada komputer paralel dengan p prosesor, maka waktu total eksekusi minimum adalah fn + (1− f )n / p Sedangkan waktu total eksekusi program pada komputer sekuensial adalah n. Dengan membagi waktu sekuensial dengan waktu paralel minimum, didapatkan speedup maksimum yang akan diperoleh komputer paralel dengan p prosesor sebagai berikut :
31 ( 3 ) keterangan : f = fraksi sekuensial 1-f = fraksi paralel p = jumlah prosesor
Analisa Dimensi Fraktal
Dimensi benda yang umum dalam kehidupan sehari-hari merupakan dimensi dalam ruang Euclid [1], yaitu 0, 1, 2, dan 3. Dimensi dapat dibayangkan sebagai sebuah ukuran jumlah titik-titik yang sedang ditinjau. Konsep ini secara matematis mungkin tampak ganjil. Akan tetapi, meski garis paling tipis sekalipun memiliki tak hingga banyaknya titik, suatu permukaan atau suatu bidang tentu lebih besar dari sebuah garis atau kurva, seperti halnya suatu ruang lebih besar dari sebuah permukaan. Inilah alasan utama pemberian label dimensi 0 untuk titik, 1 untuk garis, 2 untuk bidang, dan 3 untuk ruang.
Pola disebut fraktal jika mereka terlihat sama pada skala yang berbeda (Critten, 1996). Bentuk fraktal secara umum dapat dihubungkan ke karakteristik indicial yang dikenal sebagai dimensi fraktal. Analisa dimensi Fraktal dilakukan dengan cara melakukan fragmentasi terhadap citra yang telah difilterisasi kedalam bentuk persegi panjang berukuran s. Selanjutnya dihitung jumlah bujursangkar N(s) yang berisi warna putih (hasil filterisasi tanaman). Perhitungan ini diulangi dengan berbagi nilai s. Langkah berikutnya adalah memplot nilai log N(s) terhadap nilai log (1/s) dan menentukan bentuk persamaan regresi linier : y=ax+b. Dimensi Fraktal adalah nilai a pada persamaan regresi linier tersebut.
Metode Klasifikasi Non Parametrik Bayes
Klasifikasi Bayes dan pengambilan keputusan didasarkan pada teori probabilitas dan prinsip pemilihan opsi yang paling mungkin. Penggunaan secara praktis dari teorema Bayes adalah untuk mengubah probabilitas yang dapat diperkirakan dari pelatihan menggunakan beberapa set data, selanjutnya digunakan sebagai metode klasifikasi.
32 Bidang estimasi densitas non parametrik telah berkembang dalam beberapa tahun terakhir dengan berbagai alat-alat baru untuk analisis statistik. Tujuannya adalah untuk memperkirakan fungsi kepadatan yang mendasari dari pelatihan data, dan idenya adalah bahwa lebih banyak data dalam suatu daerah, semakin besar pula fungsi kepadatan.
Metode estimasi kepadatan nonparametrik yang paling banyak digunakan adalah estimasi kernel. Mengingat sampel acak x1 sampai xn independen terdistribusi secara identik dari probabilitas fungsi kepadatan kontinyu f, didefinisikan dalam persamaan berikut :
n i d j j ij j d h x x K h h nh x f 1 1 2 1 ... 1 ) ( ˆ (4) Keterangan : ) ( ˆ x f = fungsi kepadatan d = dimensi vektorxij = observasi ke i komponen ke j
hj = parameter lebar jendela untuk komponen ke j n = jumlah observasi
s = standar deviasi komponen ke j. Mikrokontroler
Mikrokontroler adalah mikroprosesor yang dirancang khusus untuk aplikasi kontrol, dan dilengkapi dengan ROM (Read Only Memory), RAM (Random Access Memory)dan fasilitas I/O pada satu chip. AT89S51 adalah salah satu anggota keluarga dari keluarga MCS-51/52 yang dilengkapi dengan internal 4 Kbyte flash PEROM (Programmable and Erasable Read Only Memory), yang memungkinkan memori program untuk dapat diprogram kembali. AT89S51 dirancang oleh Atmel sesuai dengan instruksi standard dan susunan pin 80C51 (Atmel Datasheet).
33 Gambar 6. Mikrokontroler AT89S51 (AT89S51 Datasheet, 2011)
Mikrokontroler dapat diprogram langsung melalui kabel yang dihubungkan dengan paralel port pada suatu Personal Computer. Adapun fitur yang dimiliki Mikrokontroler AT89S51 adalah sebagai berikut :
1. Sebuah CPU (Central Processing Unit) 8 bit yang termasuk keluarga MCS51. 2. Osilator internal dan rangkaian pewaktu, RAM internal 128 byte (on chip). 3. Empat buah Programmable port I/O,masing-masing terdiri atas 8 jalur I/O 4. Dua buah Timer Counter 16 bit.
5. Lima buah jalur interupsi (2 interupsi external dan 3 interupsi internal ) 6. Sebuah port serial dengan kontrol serial full duplex UART (Universal
Asynchronous Receiver Transmitter).
7. Kemampuan melaksanakan operasi perkalian, pembagian dan operasi Boolean (bit)
8. Kecepatan pelaksanaan instruksi per siklus 1 mikro detik pada frekuensi clock 12 MHz
9. 4 Kbytes Flash ROM yang dapat diisi dan dihapus sampai 1000 kali 10. In-System Programmable Flash Memory
Dengan keistimewaan diatas, pembuatan alat menggunakan AT89S51 menjadi lebih sederhana dan tidak memerlukan IC pendukung yang banyak. Sehingga mikrokontroler AT89S51 ini mempunyai keistimewaan dari segi perangkat keras. Adapun blok diagram dari mikrokontroler 89S51 diperlihatkan pada Gambar 7. Susunan pin mikrokontroler AT89S51 diperlihatkan pada Gambar 8.
34 Gambar 7. Blok diagram dari mikrokontroler 89S51
35 Gambar 8. Konfigurasi Pin AT89S51 (AT89S51 Datasheet, 2011) AT89S51 memiliki sebuah CPU (Central Processing Unit) 8 bit, 128 byte RAM internal, 4 buah port I/O, yang masing-masing terdiri dari 8 bit, osilator internal dan ragkaian pewaktu, 2 buah timer/counter 16 bit, 6 buah jalur interupsi (2 buah interupsi eksternal dan 4 interupsi internal), sebuah serial port dengan full duplex UART, EPROM (Erasable and Programmable Read Only Memory) yang besarnya 4 kbyte untuk memori program, kecepatan maksimum pelaksanaan instruksi per siklus adalah 0.5 µs pada frekuensi clock 24 MHz. AT89S51 mampu melaksanakan proses perkalian, pembagian, dan boolean.
1. Konfigurasi Pin
Konfigurasi pin pada mikrokontroler AT89S51 dijelaskan pada Gambar 8. 2. Register dengan fungsi spesial
Mikrokontroler AT89S51 memiliki beberapa fungsi spesial yang secara khusus dialamatkan pada register tertentu.
3. Operasi Timer / Counter
AT89S51 menyediakan fasilitas Timer 16 bit sebanyak 2 buah yaitu Timer0 dan Timer1. Timer digunakan untuk membuat tundaan waktu/delay. Timer ini juga bisa berfungsi sebagai pencacah (counter).
Timer bekerja dengan cara menghitung pulsa clock internal mikrokontroler yang dihasilkan dari rangkaian osilator. Jumlah pulsa clock akan dibandingkan dengan sebuah nilai yang terdapat dalam register timer (TH dan TL). Jika
36 jumlah pulsa clock sama dengan nilai timer, maka sebuah interupsi akan terjadi (ditandai oleh flag TF). Interupsi ini dapat dipantau oleh program sebagai tanda bahwa timer telah overflow.
Pencacah bekerja dengan cara menghitung pulsa eksternal pada P3.4 (T0) dan P3.5 (T1). Jumlah pulsa ini akan disimpan dalam register Timer yaitu pada TH dan TL.
Gambar 9. Logika Kontrol Timer/Counter (AT89S51 Datasheet, 2011) Timer akan menghitung pulsa clock dari osilator yang sebelumnya telah dibagi 12. Agar berfungsi sebagai timer maka pada register TMOD (Timer Mode), bit C/T harus bernilai 0 dan bit Gate bernilai 0 atau pin INTx harus bernilai 1 dan pada TCON (Timer Control), bit TRx harus bernilai 1.
Pencacah menghitung pulsa dari pin input T0 dan T1. Agar berfungsi sebagai pencacah maka pada TMOD, bit C/T harus bernilai 0 dan bit Gate bernilai 0 atau pin INTx bernilai 1 dan pada TCON, bit TRx bernilai 1.
4. Komunikasi Data Serial
Komunikasi serial memiliki keuntungan dari segi efektifitasnya karena hanya membutuhkan 2 jalur komunikasi, jalur data dan clock. Data dikirim/diterima per bit secara bergantian. Pada MCS-51, data ditampung sementara dalam register SBUF (Serial Buffer) sebelum dikirim/diterima.
Pengaturan mode komunikasi data serial dilakukan oleh SCON (Serial Control register). Untuk mengatur baudrate dilakukan oleh register PCON (Power Control register). Pada AT89S51, port serial terdapat pada pin P3.0(RXD) dan P3.1(TXD).
Terdapat 4 mode komunikasi data serial yang dapat dilakukan mikrokontroler AT89S51yang dapat dipilih dengan kombinasi nilai pada bit SM0 dan SM1
37 dalam SCON. Dalam SCON, terdapat flag TI (Transmit Interrupt) dan RI (Receive Interrupt) yang menandakan sedang terjadi pengiriman atau penerimaan data.
Pengiriman data serial dimulai ketika sebuah byte data dikirimkan ke SBUF. TI akan 1 ketika data telah selesai dikirimkan. Penerimaan data serial dimulai ketika REN dalam SCON bernilai 1. RI akan 1 ketika data telah selesai diterima. Baik pada pengiriman maupun penerimaan, data akan disimpan dalam register SBUF.
5. Operasi Interupsi
Interupsi adalah kondisi yang memaksa mikrokontroler menghentikan sementara eksekusi program utama untuk mengeksekusi interupsi rutin tertentu (Interrupt Service Routine /ISR). Setelah melaksanakan ISR secara lengkap, maka mikrokontroler akan kembali melanjutkan eksekusi program utama yang tadi ditinggalkan.
Pada mikrokontroler AT89S51, terdapat 6 sumber interupsi yaitu System reset, External 0, Timer 0, External 1, Timer 1, Serial Port. Untuk mengatur kerja interupsi dapat dilakukan pengaturan pada register Interrupt Enable (IE) dan Interrupt Priority (IP).
Modulasi Lebar Pulsa
Buldan (2006) menyebutkan bahwa PWM (Pulse Width Modulator) digunakan untuk mengatur kecepatan motor DC sesuai dengan yang diinginkan oleh penggunanya. Dalam PWM gelombang kotak, frekuensi tinggi dibangkitkan sebagai output digital. Sebagai contoh, sebuah port bit secara kontinyu melakukan kegiatan saklar on dan off pada frekuensi yang relatif tinggi. Selanjutnya, bila sinyal diumpankan pada Low Pass Filter (LPF), tegangan pada output filter akan sama dengan Root Mean Square (RMS) dari sinyal gelombang kotak. Tegangan RMS inilah yang dapat divariasikan dengan mengubah duty cycle dari sinyal.
Duty cycle menyatakan fraksi waktu sinyal pada keadaan logika high dalam satu siklus. Satu siklus diawali oleh transisi low to high dari sinyal dan berakhir pada transisi berikutnya. Selama satu siklus, jika waktu sinyal pada keadaan high
38 sama dengan low maka dinyatakan sinyal mempunyai duty cycle 50%. Duty cycle 20% menyatakan sinyal berada pada logika 1 selama 1/5 dari waktu total.
Pada sistem kontrol dengan PWM perlu ditambahkan speed encoder sebagai umpan balik dari sistem. kecepatan rotasi dari sebuah motor listrik bergantung pada tingkat pengulangan dan waktu switching dari relay penghubung dengan asumsi beban motor adalah konstan. Dengan kondisi tersebut, sistem akan menemukan keseimbangan antara kecepatan putaran motor dan beban motor. Akan tetapi, jika beban motor berubah maka kecepatan motor akan terpengaruh. Hal ini tidak terjadi pada sistem dengan umpan balik (Krokar, 2008).
Gambar 10. Ilustrai Duty cycle 30% dalam satu siklus. Penelitian Terdahulu
1. Pembangunan VRT untuk Pemberantasan Gulma
Tangwokit, R. dan kawan-kawan dari Asian Institute of Technology pada tahun 2006 membangun suatu aplikasi Real-time VRA berbasis kamera untuk mengontrol gulma di perkebunan gula. Kamera digunakan untuk menangkap citra gulma, selanjutnya diolah berdasarkan nilai R (Red), G (Green) dan B (Blue) untuk menentukan prosentase serangan gulma. Selanjutnya nilai yang diperoleh digunakan sebagai acuan bagi aktuator untuk menjalankan alat penyemprot sesuai dengan prosentase serangan gulma. Teknologi yang digunakan adalah dengan mengaplikasikan sistem pompa penyemprot PWM (Pulse Width Modulation). Penggunaan PWM memungkinkan pengaturan tekanan pompa sesuai dengan kebutuhan. Hubungan antara prosentase serangan gulma dan aksi yang dilakukan adalah sebagai berikut :
39 Tabel 6. Hubungan antara tingkat kehijauan citra dan aksi yang dilakukan
Tingkat Intensitas Warna Hijau Aksi Penyemprotan 0 : Tidak ada gulma Tidak ada penyemprotan 1 : Jumlah gulma sedikit Penyemprotan ringan 2 : Jumlah gulma sedang Penyemprotan sedang 3 : Jumlah gulma banyak Penyemprotan tinggi
Sistem yang dibangun menggunakan sebuah aktuator untuk mengatur debit cairan pada dua buah penyemprot dengan lebar kerja 75 cm, dan tekanan 275.8 kPa. Sebelum menentukan kecepatan kerja maksimum dilakukan uji coba untuk menghitung waktu yang diperlukan bagi software untuk melakukan satu kali aksi. Hasil yang diperoleh adalah waktu jeda satu detik dengan jarak antara kamera dan aktuator 0.77 m, sehingga kecepatan kerja maksimum adalah 0.77 m/s. Uji coba pada 100 x 75 grid dengan ukuran citra 62 cm x 84 cm nilai error yang diperoleh adalah 0.31 %.
Krishnan dan Viswanathan(2010) meneliti alternatif algoritma pemrosesan citra, terutama pada kondisi dimana subyektifitas dan parameter sangat sensitif. Penelitian yang dilakukan termasuk fungsi fuzzifikasi citra, fuzzy operator dan pilihan fungsi deffuzifikasi.
Xavier dan kawan-kawan (2011) melakukan penelitian untuk membedakan tanaman pokok dan gulma pada baris tanaman jagung. Pada penelitian tersebut digunakan metode kombinasi linier nilai R (Red), G (Green), dan B (Blue) dengan nilai koefisien R = − 0.884, G = 1.262, B= − 0.311 untuk membedakan piksel tanaman. Nilai koefisien tersebut diperoleh dengan menggunakan metode optimasi algoritma genetik, dan membuktikan kelebihannya dibanding metode Excess Green Coefficients yang menggunakan r = − 1, g = 2, b = − 1. Pemrosesan citra dilakukan dengan FIP (Fast Image Processing) dimana citra dibagi menjadi beberapa bagian horizontal. Dari hasil ujicoba di lapangan menunjukkan sistem yang dibangun memiliki ketelitian 85.1% dalam mendeteksi gulma dan 68.9% dalam mendeteksi tanaman pokok.
Paice (1996) meneliti kebutuhan kontrol untuk penyemprotan selektif herbisida. Kesimpulan dari penelitian yang dilakukan adalah bahwa kebutuhan
40 akan penyemprotan patch dapat diaplikasikan dengan mengkombinasikan sistem injeksi laju konsentrasi larutan. Kunci utama dari penelitian yang dilakukan adalah pada ketelitian, kecepatan respon pemberian dosis dari satu penyemprotan ke penyemprotan selanjutnya. Penggunaan nozle ganda, sistem pulsa dan pemompa tipe rotari menghasilkan respon lebih kecil dari 1 detik.
Yang Chun-Chieh (2003) membangun sistem penyemprotan presisi herbisida pada lahan jagung. Pemrosesan citra dilakukan dengan Jaringan Syaraf Tiruan, dimana nilai kehijauan suatu piksel dijadikan landasan utama penentuan dosis aplikasi. Simulasi dengan inferensi Fuzzy menunjukkan bahwa penyemprotan presisi memiliki potensi mengurangi polusi air dari akibat penyemprotan yang dilakukan.
2. Aplikasi Komputasi Paralel dan Sistem Multi Agen
Khawarizmie (2006) melakukan penelitian dengan tujuan menguji komputasi paralel pada algoritma PNN yang diterapkan pada proses klasifikasi mutu buah tomat. Unjuk kerja komputasi paralel dibandingkan dengan hasil perhitungan dengan prosesor tunggal. Dari hasil perhitungan diperoleh akurasi klasifikasi komputasi paralel dan komputasi sekuensial tidak jauh berbeda, dengan nilai 89.2%. Peningkatan kecepatan dengan penerapan komputasi paralel rata-rata 128.8 %.
Ligtenberga (2004) menggunakan Sistem Multi Agen untuk mensimulasikan skenario spasial berbasis pada pemodelan pengambilan keputusan multi aktor pada perencanaan proses spasial. Berdasarkan pada studi kasus untuk perencanaan tata guna lahan di Belanda selanjutnya dibahas potensi dan keterbatasan Sistem Multi Agen yang dibangun.
3. Analisa Serangan Gulma
Guyer (1986) dalam A.J. Perez (1997) melakukan penelitian mengenai kelayakan dari penggunaan bentuk daun sebagai identifikasi jenis tanaman. Penelitian awal terbatas pada pemisahan beberapa jenis tanaman yaitu tiga jenis tanaman pokok dan lima spesies gulma terhadap latar belakang citra (tanah).
41 Hatfield dan Pinter (1993) dalam Perez (1997) melakukan tinjauan potensi dari pengamatan jarak jauh untuk kegiatan proteksi tanaman di lahan, dan menyimpulkan bahwa untuk membedakan tanaman pokok dan gulma adalah dengan memperhatikan pola yang terlihat pada tanaman selama proses budidaya.
Brown dan kawan-kawan (1994) dalam A.J. Perez (1997) melaporkan bahwa pendeteksian gulma pada lahan pertanian dapat dilakukan berdasarkan karakteristik pantulan spectrum cahaya. Tetapi Brown menambahkan bahwa mungkin perlu identifikasi suatu kelompok gulma lebih dari sekedar identifikasi suatu spesies gulma secara individual.
Woebbecke dan kawan-kawan (1995) dalam A.J. Perez (1997) menggunakan analisa fitur bentuk untuk membedakan tanaman berbiji tunggal (monocots) dan berbiji belah (dicots). Tanaman yang dipergunakan pada penelitian dibudidayakan secara individual pada pot, dan informasi warna digunakan untuk membedakan antara tanaman dan latar belakang.
Zhang dan Chaisattapagon (1995) dalam A.J. Perez (1997) mempelajari tiga pendekatan berbeda untuk identifikasi gulma pada lahan gandum dengan mesin visi, yaitu analisa warna, analisi bentuk dan analisa tekstur. Mereka menggunakan citra digital hitam-putih dengan berbagai variasi penyaring warna (colour filters) pada lingkungan laboratorium.
Perez A.J. dan kawan-kawan (1997) melakukan penelitian tentang penggunaan teknik analisa warna dan bentuk untuk mendeteksi gulma pada tanaman sereal.
Marchant (2003) membandingkan metoda pengklasifikasian Bayes dengan jaringan syaraf tiruan multi layer untuk membedakan tanaman pokok dan gulma. Hasil penelitian menunjukkan bahwa metode Bayes memberikan hasil yang lebih baik dibanding penggunaan jaringan syaraf tiruan multi layer.
Steward B. L.dan Tian L. F. (1999) melakukan penelitian penggunaan mesin visi untuk menduga kepadatan gulma secara langsung pada kondisi pencahayaan luar ruangan.
Ghazali (2008) melakukan penelitian penggunaan sistem mesin visi untuk strategi pemberantasan gulma dengan teknik pengolahan citra. Pada
42 penelitian ini digunakan contoh gulma pada lahan kelapa sawit dimana citra gulma dibedakan menjadi jenis narrow dan broad. Hasil ujicoba menunjukkan bahwa sistem yang dibangun mampu melakukan klasifikasi dengan ketelitian diatas 80%.
Imran Ahmed dan kawan-kawan (2008) melakukan penelitian pendeteksian serangan gulma secara real-time dengan parameter batas citra gulma (edge based). Mirip dengan penelitian Kamarul Hawari Ghazali (2008) yang menggunakan dua pengelompokan, yaitu jenis narrow dan broad.
4. Penggunaan Kamera Digital sebagai Sensor Lapangan
Winandar R. (2011) melakukan penelitian dengan tujuan mengembangkan sensor tingkat warna daun untuk menentukan kebutuhan pupuk tanaman kedelai. Metode penelitian yang dilakukan adalah dengan menggunakan kamera digital sebagai penangkap citra warna daun sebagai indikator kekahatan terhadap unsur hara tertentu. Citra hasil tangkapan kamera digital kemudian dibandingkan dengan perangkat BWD (Bagan Warna Daun) untuk menentukan dosis pemupukan.
Astika (2010) melakukan penelitian yang bertujuan untuk mempelajari penggunaan kamera pada telepon genggam untuk menangkap citra tanaman padi dan membandingkannya dengan tingkat warna kehijauan dari BWD standar IRRI (International Rice Research Institute). Metode pemotretan yang dilakukan adalah dengan memotret daun padi pada latar belakang putih pada penyinaran dibawah bayangan manusia (1000 lux) dan dibawah cahaya matahari (8500 lux). Citra hasil tangkapan selanjutnya selanjutnya diproses untuk mendapatkan nilai R, G, dan B. Hasil pengolahan citra selanjutnya dibandingkan dengan BWD untuk menentukan dosis pemupukan tanaman padi sesuai standar IRRI.
5. Penggunaan Metode Segmentasi
Rahimizadeh dkk (2009) dari Departemen Elektrik dan Elektronik, Fakultas Teknik Universitas Putra Malaysia melakukan penelitian dengan mempromosikan penggunaan metode statistik dalam klasifikasi. Persamaan
43 keputusan penentuan segmentasi batas yang diperoleh dari probabilitas kondisional kelas fungsi densitas (PDF) digunakan untuk segmentasi warna daun pada tanaman. Klasifikasi Bayesian dan pengambilan keputusan didasarkan pada teori probabilitas dan memilih yang paling mungkin atau risiko terendah. Estimasi nonparametrik dengan metode fungsi kernel Gaussian digunakan untuk dua estimasi PDF dimensi warna yang diinginkan. Hasil penelitian menunjukkan bahwa algoritma yang diusulkan bekerja lebih baik dalam hal akurasi klasifikasi, khususnya ketika gambar terkena efek lingkungan pencahayaan.
Solahudin et al. (2010). melakukan penelitian untuk mengidentifikasi jenis tanaman dengan metode dimensi fraktal dan melakukan segmentasi tingkat serangan gulma dengan metode fuzzy clustering. Metode dimensi fraktal yang digunakan mampu membedakan berbagai jenis tanaman dan gulma, dan metode fuzzy clustering mampu melakukan klasifikasi serangan gulma dengan baik.
6. Sistem Supervisori
Seminar et al (2006) mengajukan konsep supervisori untuk rumah tanaman. Supervisori kontrol yang dibangun menyediakan berbagai pilihan mode kontrol parameter. Sistem yang dibangun dilengkapi dengan pengendalian optimal untuk berbagai jenis tanaman, jenis perangkat yang dikendalikan meliputi unit pemanas, sistem irigasi otomatis, dan dilengkapi dengan sistem pemantau kondisi iklim mikro di dalam rumah tanaman. Arsitektur sistem supervisori yang dibangun terdiri dari modul input, control knowledge, climate knowledge, I/O knowledge, crop knowledge dan supervisory control engine. Pada tahap operasional supervisory control engine akan menghubungkan preferensi pengguna yang dituangkan dalam modul input dan knowledgebase untuk menghasilkan kontrol pada perangkat-perangkat yang tersedia selama proses budidaya dalam rumah kaca.
Alimudin (2012) melakukan penelitian penggunaan sistem supervisori lingkungan pada model closed house untuk ayam boiler. Pada penelitian ini sistem supervisori digunakan untuk mengatur, mengkoordinasikan, dan
44 mengintegrasikan unit-unit kendali yang bekerja pada sistem. Sistem supervisori yang dibangun mengadopsi sistem supervisori kendali untuk rumah tanaman.