Perpustakaan Nasional: Katalog Dalam Terbitan (KDT)
Mekanika T eknik: Statika Dalam Analisis Struktur Berbentuk Rangka/Binsar Hariandja: edi tor. Pumomo Wahyu Indarto. - Cet. 1. -Jakarta: Erlangga, 1996. 238 him. : ilus. : 21 cm
Bibliografi
ISBN 979-411-211-90
1. Statika I. Judul. 11. Purnomo Wahyu Indarto
MEKANTKA fEKNlK:
STAT1Kii D;-lL4J\1 /i.NAUSJS STR!lKTUf? K..t!\,GKA
Hak Cipta © 1996 pada Penerbit Erlangga
Disusun oleh : k Bin:;.,;r H,w.tncja. M.Fng. Ph.D
(Jttntsan Teknik Sipil, Fakultas Teknik Sipil dan Perencanaan, Institut Teknologi Bandung)
Editor Ir. Purnomo Wahyu Indarto lr. Hobby Parhusip
Buku ini diset dan dilay-out oleh ·Bagian Produksi Penerbit Erlangga dengan Power Macintosh (Palatino 10 pt)
Diset oleh Ilustrator
Percetakan
'·
Team MIPA-PE�11 Dept. Setting Team MIPA-PERTI Dept. Setting
PT. G�lora Aksara Pratama. Cetalam pertama, 1996
Dilarang keras mengutip, menjiplak, atau memfotokopi sebagian atau seluruh isi buku ini serta memperjualbelikannya tanpa izin tertulis dari Penerbit Erlangga.
Statika adalah cara perhitungan dalarn analisis struktur, khususnya untuk sistem \·ang statis tentu, yang komponen reaksi perletakan dan gaya dalarn ditentukan dengan menggwcakan kriteria keseirnbangan. Sebagai salah satu metode perhitungan dalam analisis struktur. statika mendapatkan peranan sebagai pembuka dalarn memperkenalkan mekanika teknik bagi kalangan yang untuk pertarna kalinya dituntun ke dalarn disiplin ilrnu tersebut. Ini tidaklah mengherankan, karena dalam mekanika teknik, sistem yang statis tentu merupakan jenis struktur yang dapat dianalisis cukup dengan menerapkan cara statika saja. Penguasaan cara statika up.tuk selanjutnya dapat dijadikan sebagai bekal dasar untuk mempelajari metode-metode lanjut dalarn analisis sistem struktur yang lebih rumit dan kompleks.
Tidak dapat dipungkiri bahwa dewasa ini cukup banyak buku-buku statika yang tersedia dalam kasanah bacaan di tanah air, baik yang merupakan buku impor dalam bahasa asing, terjemahan, maupun buku asli yang dituliskan dalarn bahasa Indonesia. Namun, ada beberapa hal yang mendorong pengarang dalam menuliskan buku ini. Pertama, sementara tingkat penguasaan bahasa asing dari kalangan perekayasa di Indonesia merupakan aspek yang masih memerlukan peningkatan, dirasakan perlunya usaha untuk menarnbah perbendaharaan buku buku bacaan dalam bahasa Indonesia. Kedua, perubahan program tahap sarjana dari rencana Iima tahun ke em pat tahun, memerlukan reorganisasi penyajian bahan perkuliahan yang semakin padat. Mekanika teknik yang dulunya diberikan hingga delapan semester, dewasa ini dipadatkan dalarn hanya Iima atau enarn seme�ter saja.
vi MEKANIKA TEKNIK: STATIKA DAIAM ANAUSIS STRUKTUR BERBENTUK RANGKA
Statika dalam buku ini telah diusahakan disajikan untuk dapat menampung berbagai kecenderungan yang telah dipaparkan di atas. Tentu saja, metode-metode yang ada dalam statika, tetap berlaku sebagai metode dasar. Hal yang relatif baru adalah aspek diskritisasi sistem struktur, yang nantinya akan digunakan secara luar dalam formulasi matriks. Konsep pemodelan sistem struktur atas elemen-elemen dan titik simpul, diperkenalkan dalam Bab 4.
Dengan demikian, pembaca disuguhi pola penyajian yang konsisten serta berkesinambungan dengan pola penyajian dalam formulasi matriks yang akan dihadapi nantinya dalam analisis struktur lanjut.
Dalam kesempatan ini, penulis mengucapklan terima kasih kepada semua pihak yang telah mengilhami, mendorong, serta membantu penulisan buku ini. Di samping pengalaman kerja mengajar selama kurang lebih dua dasawarsa, penulis telah mendapatkan dasar pengetahuan mekanika teknik dari para dosen pengajar di Jurusan Teknik Sipil, Fakultas Teknik Sipil dan Perencanaan, Institut Teknologi Bandung. Kenangan manis yang membekas secara mendalam, penulis telah peroleh dari para dosen pengajar. Dedikasi tinggi, serta sikap percaya diri dalam belajar, merupakan bekal yang penulis terima dari Prof. lr. R. Soemono (alm.). Daya tarik yang memikat dari mekanika teknik telah penulis peroleh dari Prof. Dr. Ir. K.P.H. Sosrowinarso Sosrodiningrat (alm.). Beliau selalu membuat segala sesuatu dalam aspek mekanika teknik, menjadi sangat menarik serta mudah dipahami. Kesabaran, keuletan dan ketetapan hati sebagai modal dalam ketekunan mempelajari mekanika teknik diberikan oleh Prof. Ir. Djuanda Suraatmadja. Beliau juga telah meluangkan waktu untuk memberikan saran berharga dalam proses penyempumaan naskah. Kebiasaan penyajian yang rapih dan elegan dari proses analisis mekanika teknik telah penulis peroleh dari lr. Kadarman Harsokusumo. Dukungan serta dorongan dari para dosen rekan penulis, khususnya Dr. Ir. Amrinsyah Nasution dan Dr. lr. Ananta Sofwan, sangat membantu proses berlangsungnya penulisan buku ini. Untuk semuanya
itu, penulis hanya dapat menghaturkan banyak terima kasih.
i Ucapan terima kasih khususnya penulis haturkan kepada saudara Ir. Hobby Parhusip,
serta Hadi Sukmawan Widjaja, Dody Brahmantyo, Farid Rosyidin, dan Dadang Rochman, mahasiswa tingkat akhir di jurusan Teknik Sipil ITB. yang telah membantu penulis mempersiapkan naskah asli dan gambar-gambamya. Pengaturan format dan setting, penerbitan serta pencetakan yang menarik telah dilaksanakan oleh Penerbit Erlangga, Jakarta. Ucapan terima kasih juga penulis berikan kepada isteri dan anak-anaknya, yang telah berkorban untuk merelakan banyak waktu yang berharga buat penulisan buku ini. Akhirnya, penulis mengharapkan saran, usul, serta kritik penyempurnaan dari para pembaca, yang dapat digunakan untuk perbaikan lanjut dalam isi dan format buku ini bagi edisi berikutnya, disertai harapan, semoga tulisan ini bermanfaat dalam menambah perbendaharaan ilmu di persada tanah air.
I
•I
0 FTAR ISI ... vtu
1.1 Sistem Struktur dan Pengaruh Luar ..... .. . .. . .. ... ... ... ... . ... ... ... ... .. . . . .. . .... .. . . 1
1.2 Tanggap Sistem Struktur ... 2
1.3 Analisis Respons Sistem Struktur ...... 2
1.4 Lingkup Bahasan ...... 3
1.5 Sistematika Pembahasan ........... ... . ... 5
HU UM DA A ... ... . 2.1 Umum ... ... . ... . . ... ... 7
2.2 Hukum Kedua Newton... 7
2.3 Hukum Pertama Newton................................................................................ 8
2.4 Hukum Ketiga Newton ................... ... ... 8
2.5 Konsep Badan Bebas ...... ... 10
2.6 Hukum Superposisi.. .... ... 10
2.7 Hukum Coulomb... 11
2.8 Hukum Sa tu an ...... ... 12
2.9 Rangkuman ...... 14
3.1 Gaya Sebagai Besaran Vektor ...... 15
3.2 Sistem Tata Sumbu .... ... ... 15
3.3 Gaya Translasi dan Kopel... 16
3.4 Sistem Vektor Gay a... 17
X MEKANIK/\ TEKNIK ST/\TIKA DALAM ANALISIS STRUKTUR BERflENTUK RANGKA
BAB
11
PROGRAM ANALISIS STATIKA STRUKTUR RANGKA SENDI...195
11.1 Umum ... 195
11.2 Diagra in Blok Program ... 196
11.3 Orga nisasi Program ... 196
11.4 N otasi da n Simbol ... .. . . ... ... ... ... ... ... .... ... .. ... .. .... ... .. ... .. . ... .. . . .. .. ... . .. 199
11.5 Pemba caa n da n Masuka n . ... .... ... .. ... .... ... .. ... ... ... .... ... .. .... .. .. ... ... ... ... ... .. . . 200
11.6 Pe nyusu na n Matriks Koe fisie n ... ... 202
11.7 Perakita n da n Modi fikasi Vektor Beba n ... 205
11.8 Solusi Persamaa n S imulta n . ... .. .... .. .. . . ... ... ... ... .. .. ... .. .... .. . . .. .. .. .. .. .... ... .. . ... .. . .. 206
11.9 Pe ncetaka n Data Keluara n... 206
11.10 Progra in Analisis ... 208
11.11 Co ntoh Pe nerapa n ... 210
11.12 Ra ngkuma n ... 211
DAFTAR BUKU BACAAN ...
213
LAMPIRAN 1 PROGRAM SUMBER 11STATIKA11 • ... ... ... .. ...
215
Pendahuluan
1. 1 SISTE M STR U KTUR DAN PENGARUH LUAR
Dalam menjalankan fungsinya, setiap sistem struktur akan menahan atau menerima pengaruh luar yang perlu dipikul. Di samping pengaruh atau beban luar, sistem yang terbuat dari material bermassa juga akan memikul bobot sendiri akibat pengaruh gravitasi. Sebagai contoh, suatu bangunan gedung yang berfungsi melindungi manusia serta barang/peralatan yang ada, perlu menahan desakan angin pada permukaan atau dinding, dan goncangan beban gempa yang mungkin terjadi. Struktur dam perlu direncanakan mampu memikul desakan air yang dihempangnya, dan kemungkinan beban gempa. Struktur jembatan perlu mampu memikul beban kendaraan dan getaran gempa, di samping menahan pengaruh getaran komponen yang bergerak atau berputar, dan lain-lain sebagainya.
Pengaruh luar yang bekerja pada sistem struktur kebanyakan dapat dinyatakan sebagai besaran gaya dengan intensitas yang dapat diukur. Pengaruh tersebut dinamakan beban atau
gaya luar. Contohnya antara lain adalah bobot mati struktur, beban manfaat berupa beban hidup, angin, gempa dan lain sebagainya. Besar/intensitas serta cara bekerja beban luar yang perlu ditinjau, diatur dalam standar pembebanan. Namun, ada pula pengaruh luar yang tidak dapat diukur sebagai gaya. Sebagai contoh, dapat disebutkan pengaruh amblasan perletakan a tau
pondasi gedung, desakan akibat pengembangan volume air yang membeku terhadap dinding
basement di permukiman yang mengalami empat musim, dan lain sebagainya.
2 MEKANIKA TEKNTK ST \ TIKA DALAM ANAUSh STRUKH ·p BFr<BENTUK RANGKA
Ditinjau dari cara kontak dengan sistem, gaya luar dapat dibagi atas dua kelompok. Yang
pertama adalah gaya badan
(body forces), yaitu gaya yang bekerja terdistribusi atas titik bermaterisistem, misalnya bobot sendiri, beban gempa dan lain sejenisnya. Yang
kedua
adalah gaya traksi permukaan (surface tractions) yang bekerja pada sisi batas luar sistem, misalnya beban lantai bangunan, tekanan air pada dinding dam, beban angin pada dinding luar bangunan, dan lain sejenisnya. Pembahasan lebih lanjut mengenai gaya luar disajikan lebih rinci dalam Pasal 4.5 mendatang.1 .2 TA NGGA P SISTEM STRUKTU R
Sistem struktur direncanakan harus mampu memikul beban atau pengaruh luar apapun yang bekerja, dan akhirnya meneruskan pengaruhnya kepada bagian pendukung, misalnya tanah. Sebagai contoh, sistem struktur gedung akan memikul beban luar serta meneruskannya ke pondasi untuk selanjutnya ditransfer ke tanah. Untuk jelasnya, pandanglah suatu sistem struktur seperti dalam Gambar 1.1. Beban luar dipikul oleh sistem dan kemudian meneruskannya ke perletakan, berbarengan dengan munculnya gaya-gaya dalam pada struktur. Sistem yang terbuat dari bahan yang tidak kebal perubahan bentuk, umumnya akan berpindah dari kedudukan awal (sebelum terbebani) ke kedudukan akhir saat tercapai kedudukan yang mantap dan seimbang di bawah pengaruh gaya-gaya luar yang ada. Dengan demikian, respons sistem terhadap beban atau pengaruh luar, terdiri dari gaya-gaya (termasuk gaya dalam dan perletakan), dan perpindahan (peralihan dari konfigurasi awal ke konfigurasi akhir). Singkatnya, respons
atau tanggap struktur mencakup timbulnya medan gaya (force field) dan medan perpindahan
(displacement field) dalam struktur. Pada hakekatnya, gaya-gaya dalam serta defonnasi (perubahan bentuk) terjadi secara berbarengan sebagai respons sistem terhadap beban atau pengaruh luar.
--:::: ::::::�
:::::::::::, �# ,.,
----GAMBAP 1.1 Beban Luar dan T.mggap Struktur
1.3
A N ALISIS RESPO NS SISTEM STRU KTURKonfigurasi akhir
· R 1 PF.I"D.".HULUAN 3
deformasi atau perpindahan diperlukan sebagai data untuk menentukan kenyamanan atau daya layan (serviceability aspect) sistem.
GAMBAR l 2 Lingkup Analisl> Struktur
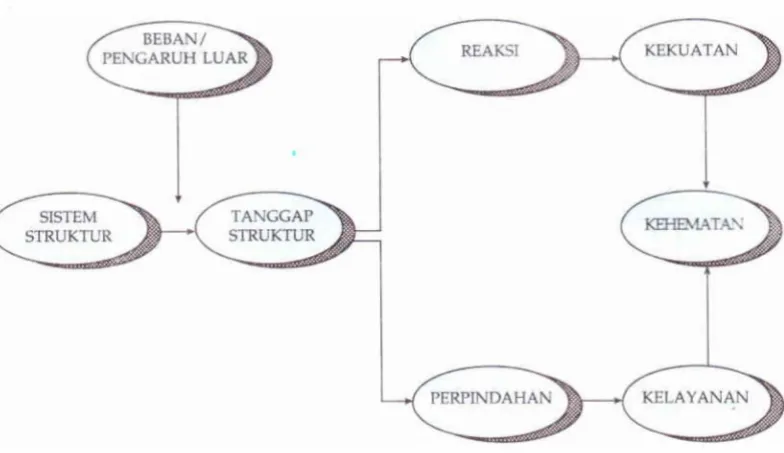
Analisis respons sistem struktur dapat dibagi atas dua kelas, yaitu desain/perencanaan
dan pemeriksaan. Dalam perencanaan, gaya-gaya dalam dihitung untuk dijadikan data penentuan ukura."'\ komponen struktural (dimensionering), perpindahan untuk menentukan bahwa struktur yang cukup kuat, juga berperilaku andal/nyaman untuk difungsikan. Karena umumnya intensitas gaya reaksi serta perpindahan tergantung ukuran atau konfigurasi dari komponen sistem (yang justru perlu ditentukan), maka perencanaan perlu dimulai dari suatu penaksiran dimensi dan konfigurasi awal, lalu secara iteratif dianalisis untuk memperoleh desain akhir
yang cukup kuatlaman, nyaman dan ekonomis. Lihat bagan Gambar 1.2 sebagai penjelasan
dengan alur tindak proses seperti dalam Gambar 1.3
Dalam
pemeriksaan,
gaya reaksi dan perpindahan dihitung berdasarkan dimensi yang sudah ada. Kemudian reaksi yang timbul digunakan untuk memeriksa cukup tidaknya dimensi yang ada untuk mengerahkan kekuatan/keamanan. Perpindahan digunakan untuk memeriksa apakah stuktur akan berfungsi layak atau nyaman untuk beban luar yang mungkin bekerja. Sebagai gambaran, sering kasus dengan sistem cukup kuat tapi tidak berfungsi andal atau nyaman, misalnya lantai bangunan yang melendut atau bergetar secara berlebihan, tuas mesin yang macet berputar akibat deformasi yang berlebihan, dan sebagainya. Lihat bagan Gambar 1.4 sebagai penjelasan1 .4 LI N G K U P BP,HASA�-J
4 MFKANIKA TEKNIK STATIKA DALAM ANALISIS STRUKTUR BERBENTUK RANGKA
T y
T y
GAMBAR 1.3 Alur Tindak Perencanaan Struktur
sistem yang ditinjau adalah sistem yang berperilaku elasitis linier, dengan respons struktur yang terjadi sebanding (berbanding lurus, atau proporsional) dengan intensitas gaya luar.
Dalam paparan sebelumnya telah diuraikan bahwa respons sistem mencakup timbulnya medan gaya dan medan perpindahan. Sekalipun umumnya kedua medan itu berkaitan satu sama lain, namun dapat dihadapi kasus yang intensitas medan gayanya tidak dipengaruhi oleh intensitas medan perpindahan. Dalam hal ini, dihadapi sistem struktur yang dinamakan statis
tentu.
Dengan demikian, penentuan gaya-gaya reaksi cukup dilakukan hanya dengan menerapkan kriteria keseimbangan seperti dibahas dalam Bab 3. Dikatakan bahwa penentuan gaya reaksi untuk sistem struktur yang statis tentu, cukup dilakukan dengan metodestatika
saja. Bahasan ini dibatasi hanya untuk analisis statika sistem struktur yang statis tentu saja.1 l''\DAHULUAN 5
rekayasa. Jika sudah diberikan kemampuan yang andal, pembaca akan dengan cukup mudah dan siap untuk mengikuti aspek mekanika struktur yang lebih kompleks.
DATA STRUKTUR
PEMODELAN
ANALISIS TANGGAP STRUKTUR
PERIKSA:
-KEKUATAN
-KELAYANAN
-KUAT/TIDAK -LA YAN /TIDAK
SELF.SAI
GAMBAR l 4 Alur Tindak Pemerik'J�n Struklur
1 . 5 SISTE M ATIKA PEM BAHASAN
6 MFKANIKA TEKNIK STAT!KA DALAM ANAUSIS STRUKTUR BERBENTUK RANGKA
Pemodelan struktur, sebagai langkah awal yang perlu dilakukan sebelum pelaksanaan proses analisis struktur, disajikan dalam Bab 4. Bahan sajian ini, yang telah lazim dilakukan dalam analisis struktur lanjut, sengaja diberikan dalam buku ini, dengan maksud agar diperoleh sajian yang konsisten dengan yang akan dilakukan nantinya dalam proses analisis lanjut (formulasi matriks). Bahasan bab ini mencakup aspek diskritisasi sistem, identifikasi jenis elemen yang cocok digunakan, sifat-sifat sambungan dan perletakan, serta penentuan ketidaktentuan statis sistem struktur. Pemodelan gaya luar juga tidak lupa diberikan dalam bab ini. Sebagai uji coba, sekaligus pengantar kepada analisis struktur yang rinci, dalam Bab 5 diberikan beberapa contoh analisis sistem sederhana.
Analisis formal dan rinci dari beberapa jenis sistem struktur diberikan dalam beberapa bab berikutnya: analisis struktur balok tunggal dan balok menerus dalam Bab 6, struktur rangka sederhana (sambungan sendi) dalam Bab 7, serta struktur pelengkung dalam Bab 8. Bahasan setiap jenis struktur dalam bab yang bersangkutan mencakup ulasan mengenai konfigurasi dan sifat struktur, pemodelan, penentuan ketidaktentuan statis, serta proses penentuan komponen gaya reaksi batang dan perletakan untuk beberapa kasus pembebanan yang sering dihadapi dalam terapan.
Konsep dasar mengenai garis pengaruh untuk peninjauan kasus beban bergerak, disajikan dalam Bab 9. Penerapan dalam penentuan nilai ekstrim reaksi dalam batang atau reaksi perletakan terhadap beban luar yang bergerak atau variabel dalam intensitas ataupun lokasi bekerja, dibahas dalam bab ini.
Penulisan dan penuangan algoritma statika dalam formulasi matriks diberikan dalam Bab
10. Ini dimaksudkan agar pembaca mendapatkan pengertian dan pemahaman dalam cara penulisan matriks, sekaligus mempersiapkan diri untuk terbiasa menghadapi formulasi serupa dengan yang lazim dilakukan dalam analisis struktur lanjut. Dalam bab ini, bahasan dibatasi hanya untuk sistem struktur rangka sederhana, sekalipun cara serupa juga dapat diterapkan kepada jenis struktur statis tentu lainnya.
Beberapa Kriteria
an Hukum Dasar
2.1
U M U MDalam mekanika teknik sebagai suatu cabang disiplin ilmu, berlaku beberapa kriteria dan hukum dasar. Beberapa di antaranya yang terpenting dalam statika, disajikan dalam bab ini. Seusai mempelajari bahan bab ini, pembaca diharapkan mendapatkan pengertian yang lebih mendalam serta peningkatan kemampuan dalam menerapkan kriteria dan hukum dasar penting terse but.
2.2 HUKUM KEDUA
NE\NTONPandanglah suatu sistem bermassa m yang dipengaruhi oleh suatu vektor gaya F dengan arah garis l seperti dalam Gambar 2.1. Hukum kedua Newton menyatakan bahwa
sistem
bermassa akan mendapatkan percepatan
ayang besarnya berbanding lurus dengan gaya,
serta berbanding terbalik dengan massa.
Hubungan F, dan a dinyatakan dalam rumus
8 MEKANIKA TEKNIK STATIKA DALAM ANALISIS STRUKTUR BERBENrUK RANC.KA
Besaran
F
,m, dan a dinyatakan dalam sistem satuan seperti dijelaskan dalam Pasal 2.7.Perhatikan bahwa
F
dan a adalah vektor yang beketja pada garis ketja yang sama, dalam hal ini garis t. Kedua vektor tersebut juga memiliki arah (sense) yang sama.2.3
HUKUM PERTAMA NE\NTONHukum ini menyatakan bahwa
sistem bermassa yang tidak menerima gaya luar, akan
berada dalam keadaan diam, atau bergerak beraturan dengan kecepatan seragam.
Hukum ini dapat diturunkan dari Persamaan (2.1) dengan memasukkan
sehingga 'F=o
(2 2)
a = 6
(2.3)
Dengan mengingat bahwa percepatan adalah turunan kecepatan terhadap waktu,
a = dv
(2.4)
dt
maka Persamaan (2.3) dan (2.4) menghasilkan
dv =
6
(2.5)dt yang jika diintegrasikan, memberikan kecepatan
v = c (2.6)
dengan c adalah vektor konstan yang dalam keadaan khusus dapat bemilai nol.
Jadi, jika
F
=0,
massa akan berada dalam keadaan diam, atau bergerak dengan kecepatankonstan. Hukum ini adalah dasar dari kriteria keseimbangan yang sangat penting dalam mekanika teknik, seperti dibahas secara rinci dalam Bab 3.
2.4
HUKUM KETIGA N EWTONHukum ini sering dikenal sebagai hukum "aksi-reaksi". Untuk jelasnya, pandanglah suatu sistem yang memikul beban luar seperti dalam Gambar 2.2. Sistem diberi tumpuan sedemikian hingga berada dalam keadaan diam di bawah pengaruh gaya luar yang ada.
(a) sistem (b) aksi-reaksi
BAB 2 BEBERAPA KRITERIA DAN HUKUM DASAR 9
Kemudian, kita membayangkan adanya suatu potongan fiktif yang membagi sistem atas dua bagian
V1
danV2.
Kedua bagian tersebut secara imaginatif kita pisahkan. Hukum ketiga Newton menyatakan bahwa pada permukaan (tampang potongan) kedua bagian, bekerja gaya gaya berpasangan, dengan besar sama dan arah yang berlawanan, seperti terlihat dalam Gambar 2.2b. Untuk selanjutnya kita akan melakukan praktek yang konsisten sebagai berikut.(1) Gaya-gaya berpasangan (aksi-reaksi) hanya akan muncul, atau dapat kita gambarkan sementara pada kedua bagian yang secara imaginatif kita pisahkan pada potongan fiktif.
(2)
Gaya yang berpadanan mempunyai besar (magnitude) yang sama serta arah yang berpadanan, sedemikian hingga gaya yang berpasangan akan saling menghapuskan jika subsistem "dipadukan" kembali pada potongan fiktif. Dengan demikian, gaya-gaya aksi reaksi tidak "kelihatan" pada sistem total terpadu.(3)
Jadi, gambarkanlah gaya-gaya aksi-reaksi hanya pada keadaan sistem yang secara imaginatif sedang "terpisahkan" pada potongan fiktif dimana gaya-gaya tersebut akan muncul.Dengan demikian, hukum ketiga Newton dapat dituliskan dalam bentuk.
aksi + reaksi = 0 (a)
a tau (2.7)
aksi = -reaksi (b)
Sebagai contoh, tinjaulah suatu bola berbobot W yang berada dalam keadaan diam di atas suatu permukaan licin dan datar seperti dalam Gambar 2.3 berikut. Kita ingin memeriksa gaya pada titik kontak antara bola dan lantai. Untuk keperluan ini, kita memisahkan bola dan lantai seperti dalam Gambar 2.3b, yang memunculkan gaya aksi-reaksi. Kriteria keseimbangan (baca Bab 3) yang diterapkan atas subsistem bola akan menghasilkan besar gaya berpasangan
A
dan R tersebut. Untuk selanjutnya, kita akan menuruti praktek seperti dalam Gambar 2.3b. Cara penggambaran aksi-reaksi secara bertumpuk dalam Gambar 2.3c kita pandang sebagai suatu prosedur yang rancu, dan tidak akan kita ikuti.A=-W
� R
=
-
A
=
W
(a) (b) (c)
10
2.5 KONSEP BADAN BEBAS
Keseimbangan keseluruhan struktur dicapai jika titik demi titik bermateri sistem berada dalam keadaan seimbang. Dengan demikian, sua tu bagian dari keseluruhan struktur juga berada dalam keadaan seimbang. Suatu bagian mandiri dan terpisah dari struktur yang diperoleh dengan melakukan suatu potongan fiktif, dinamakan badan bebas (free body). Suatu badan bebas sebagai suatU bagian struktur, tetap juga berada dalam keadaan seimbang. Keseimbangan tercapai karena pada kedua bidang potongan fiktif yang memisahkan struktur menjadi dua bagian, terjadi gaya-gaya dalam yang berpasangan sesuai kriteria aksi-reaksi. Gaya-gaya dalam yang bekerja pada potongan fiktif inilah yang bekerja dan mengimbangi gaya-gaya luar pada masing-masing bagian struktur yang ada. Dengan demikian, konsep keseimbangan badan bebas merupakan suatu cara yang cukup sederhana, namun sangat bermanfaat dalam menghitung reaksi perletakan maupun reaksi dalam. Proses peninjauan keseimbangan badan bebas dilakukan sebagai berikut.
(1) Pada suatu penampang dengan intensitas gaya dalam ingin ditentukan, dilakukan potongan fiktif.
(2) Kemudian, subbagian struktur dipisahkan sehingga muncul dua (sepasang bidang potong) yang berpasangan. Pada kedua bidang potong digambarkan gaya-gaya yang berpasangan menurut kaidah aksi-reaksi.
(3) Salah satu bagian struktur, diisolir, dan atasnya diterapkan kriteria keseimbangan yang dapat menghitung gaya-gaya dalam sebagai fungsi gaya luar. Lihat Gambar 2.2b sebagai penjelasan.
Perhatikan bahwa jika bagian sistem disatukan kembali pada potongan fiktif tadi, gaya gaya dalam yang berpasangan pada dua potong fiktif, akan saling menghapuskan, karena memang tidak akan muncul pada struktur keseluruhan. Artinya, tanpa melakukan potongan fiktif, gaya reaksi tidak akan muncul dan intensitasnya tidak akan dapat dihitung. Mulai sekarang, kita akan membiasakan diri untuk menghitung reaksi dengan terlebih dahulu melakukan potongan tempat reaksi akan muncul. Kita akan mengikuti praktek ini, termasuk dalam proses penentuan reaksi perletakan.
Bahasan mengenai kriteria keseimbangan dan penentuan gaya dalam, tidak akan dirinci lanjut dalam bab ini. Sajian mendalam mengenai ini diberikan dalam bab-bab yang akan datang.
2.6
H U K U M SUPERPOSISIHukum ini berlaku untuk sistem yang elastis linier serta konservatif, serta berbunyi sebagai berikut.
Akibat (tanggap) yang terjadi pada sistem yang ditimbulkan oleh beberapa kasus/pola pembebanan, merupakan penjumlahan langsung (secara aljabar) dari akibat masing-masing kasus/pola pembebanan.
S;[l 2 BEBERP.J'A KRlTERIA DA\J HUKUM D\SAR 11
2.7
HUKUM
COULOMBHukum ini berkaitan dengan gaya interaksi antara sistem pada bidang kontak. Hukum Coulomb menyatakan bahwa besar gaya gesek antara dua bidang kontak berbanding lurus dengan gaya tekan normal yang bekerja pada permukaan kontak tersebut. Untuk menerangkan pandanglah suatu blok yang duduk pada suatu bidang datar ya.'lg k.asar. Gaya tekan p� permukaan kontak adalah
N
= W, sehingga kecenderungan balok untuk bergeser akibat gaya dorong horizontalH,
dilawan oleh gaya gesekanF
sebesarf= f.lN (2.81
dengan J1 adalah koefisien gesek permukaan dengan nilai yang tergantung pada kekasaran
permukaan (asperities). Lihat Gambar 2.4 untuk penjelasan.
H
w
(a) (b)
GAMBAR 2.4 Model Gesekan Coulomb
Sebagai contoh, pandanglah suatu balok yang duduk di atas lantai kasar dengan koefisien gesek f.1 dan kemiringan a, seperti dalam Gambar 2.5. Pertanyaan sekarang adalah berapa besar sudut kemiringan maksimum a sehingga balok masih tetap diam (tetap pada saat hendak
meluncur) pada lantai miring. Menurut Persamaan (2.8), gaya gesek adalah sebesar f = J.1N = f.1 \V cos a
Pada saat balok hendak meluncur, diperoleh hubungan
(a}
GAMBAR 2 5 Balok Pada Lantai Miring dan Kasar
(2.9)
(2.10)
12 MFKANIKA TEKN[]( STATIKA DALAM ANALISIS STRUKTUR BERRF.NTUK RA"JCKA
Dengan demikian, dari Persamaan (2.9) dan (2.10) diperoleh kondisi bahwa
tan a� p (2.11)
a tau
a� arctan p (2.12)
Dapat ditambahkan bahwa model Coulomb merupakan salah satu dari beberapa model gaya gesekan yang sering diterapkan. Sekalipun kebenaran model ini banyak dipertanyakan orang, model ini cukup sederhana dan kerap diterapkan orang sebagai model analitis mekanika.
2.8 SISTEM SATUAN
Semua besaran dalam mekanika perlu dinyatakan dalam sistem satuan yang digunakan.
Secara umum, ada dua kelompok sistem satuan yang lazim digunakan, yaitu (a) sistem gaya,
dan (b) sistem massa.
Dalam sistem gaya, besaran gaya ditetapkan terlebih dahulu. Kemudian, massa ditentukan
sebagai satuan yang oleh gaya satuan, mendapatkan besar percepatan tertentu. Dengan demikian, massa menjadi besaran ikutan dari satuan gaya dan percepatan.
Dalam sistem massa, besaran massa ditentukan terlebih dahulu. Kemudian, gaya ditentukan
sebagai besaran yang bekerja sedemikian hingga sistem besaran satuan massa mendapatkan besar percepatan tertentu. Dengan demikian, gaya menjadi besaran ikutan dari satuan massa dan percepatan.
Besaran dasar sendiri, dapat dinyatakan dalam sistem satuan tertentu yang dipilih untuk
digunakan. Misalnya, detik (second) untuk waktu dan meter (metric system) atau kaki (foot,
dalam Imperial system) untuk panjang atau jarak. Kedua sistem tersebut dibahas secara rinci
dalam sajian berikut.
2.8.1 Sistem Satuan Gaya (FLS
system)
Untuk memulai, pilihlah satuan metrik (metric units) sebagai contoh. Gaya sebesar satu
satuan, dinamakan 1 kgf, menimbulkan sistem bermassa mengalami percepatan sebesar
percepatan gravitasi bumi, a = g = 9,80665 m/det2• Penggunaan Persamaan (2.1) memberikan
111= _1_
Menurut sistem ini, massa ditetapkan terlebih dahulu. Misalnya 1 kgm dalam satuan metrik. Gaya yang menimbulkan percepatan 1 m/ de� sua tu benda sebesar 1 kgm, dinamakan 1 N
(satuan Newton). Menurut Persamaan (2.1), diperoleh
sehingga 1 N
= (1 kgm) x (1 m/det2)
kgm · m
Newton = ---
---det2 (2.14)
Belakangan ini, dunia intemasional menggunakan sistem satuan massa sebagai dasar untuk
menetapkan sistem satuan intemasional yang dinamakan unit SI (singkatan dari bahasa Perancis
13
2.8.3 Hubungan Antara Sistem Satuan
Kedua sistem yang telah dipaparkan di atas merupakan sistem satuan yang berdiri sendiri, namun mempunyai hubungan satu sama lain. Pemilihan, mana yang digunakan, lebih-lebih berlatar belakang tradisi negara atau bangsa pemakai.
Sebagai contoh, ingin ditetapkan hubungan antara satuan gay a dalam kedua sistem satuan, yaitu hubungan antara kgf (sistem gaya) dengan Newton (sistem massa). Karena 1 Kg£ memberikan percepatan g m/ de� atas suatu sistem bermassa, sementara 1 Newton memberikan percepatan sebesar 1 m/ de�, maka diperoleh hubungan
1 kgf = g Newton (2.15)
Untuk praktek rekayasa, agar mudah diambil nilai g = 10 m/ det2, sehingga sering diambil pendekatan bahwa 1 kg£ = 10 Newton.
Untuk memperdalam pengertian sistem satuan, ada beberapa contoh perhitungan konversi antara sistem satuan sebagai berikut.
CONTOH 2.1 Dalam sistem satuan Inggris, nyatakanlah besaran gravitasi den
�
an meng gunakan konversi dari sistem satuan metriks, yaitu g = 9,80665 m/ det . Gunakanketelitian hingga 6 digit.
yang dalam praktek sering dibulatkan menjadi 32,2 ft/ de�.
CONTOH 2.2: Tentukan konversi besaran tekanan 1 kgf/crn2 dalam satuan metriks (sistem gaya) ke satuan MPa (rnega Pascal, 106 N/rn2) dalam satuan SI (sistem massa).
Penyelesaian
Dari Persamaan (2.15) diketahui bahwa 1 kgf = g Newton. Dengan demikian, diperoleh
(2.17)
= 0,09807 MPa
yang dalam praktek sering dibulatkan menjadi
1 kgf/ crn2 = 0,10 MPa (2.18)
dengan
1 Pa = 1 N/rn2 (2.19)
CONTOH 2.3: Tekanan udara sering dinyatakan dalam satuan metriks sebesar 1 atm = 1,03323
14 MEKANlKA TEK'-JIK 5TATIKA OALAM ANALISIS STRUKTUR BFRBENTUK RANGKA
Penyelesaian
Dari persamaan (2.15) diketahui bahwa 1 kgf == g Newton, sehingga diperoleh
1 atrn -=- = 101325 Pa (2.20)
3. l
GAY A SEB/\GAI BESARAN VEKTORBesaran (quantity) dapat dibagi atas dua kelompok yaitu skalar (scalars) dan vektor (vec
tors). Dibandingkan dengan besaran skalar yang hanya memiliki besar (magnitude), maka selain
besar vektor juga harus dinyatakan dengan garis kerja (line of direction), arah (sense), dan titik tangkapnya (point of application) secara lengkap.
Contoh besaran skalar adalah ukuran waktu (detik, jam, tahun, dan sebagainya), temperatur (°C, °F, °K), jumlah (orang, buah, ekor dan sebagainya), panjang (meter, kaki, hasta dan sebagainya), dan lain sejenisnya. Besarnya skalar dinyatakan sesuai dengan skala yang didefinisikan untuk pemyataan besar. Contoh besaran vektor antara lain dapat diketengahkan gaya, kecepatan, percepatan, lintasan, perpindahan dan lain sebagainya. Sebagai contoh, kecepatan
V
meter/detik (atau km/jam) perlu dinyatakan apakah ke depan atau mundur, ke utara atau ke selatan. Percepatan gravitasi g = 9,81 m/ de� memiliki arah vertikal ke bawah menuju pusat bumi. Dalam Bab 1 telah dijelaskan bahwa dalam analisis statika, kita hanya membahas gaya luar dan reaksi yang ditimbulkannya secara ekstensif. Bab ini sepenuhnya diperuntukkan bagi pembahasan sistem gaya sebagai besaran vektor, untuk mendapatkan dasar yang mantap sebelum pembaca mengikuti bab-bab substansif mengenai analisis statika.3.2
SISTEM TATA SUtv1BUUntuk dapat menyatakan kedudukan titik bermateri sistem struktur dalam tata ruang, kita
menggunakan tata umbu yang dalam hal ini dipilih tata sumbu Kartesius. Tata sumbu Kartesius
(X,Y,Z)
dalam Gambar 3.1 mengikuti "aturan tangan kanan", yang identik dengan pularansekrup, pemutaran dari sumbu
X
po itif ke umbuY
positif akan menghasilkan gerakan sekrupke arah sumbu
Z
positif, putaranY
positif keZ
po itii menghasilkan gerakan sekrup ke sumbuX
positif, dan seterusnya. Lihat diagram dalam Gambar 3.1.b untuk penjelasan. Titik awal (origin)0
dapat dipilih secara sembarang. Dengan demik:ian, tempat kedudukan suatu titik dapat dinyatakan relatif terhadap titik awal ini. Suatu titik cirianP
dalam ruang sekarang dapat16 \11 K \ '. I K \ I I K '\c I f, �I \ 1 1 f: \ LJ,\ I ·\M !�IS S I 1\ L Kl l . R llJ Rllf 1\. Tl K RAN( ;r:,,\ gaya translasi sebagai vektor yang dilengkapi dengan atribut besar, garis kerja, arah dan titik tangkap. Di sarnping itu, tinjaulah suatu garis m yang normal terhadap bidang
XY,
sehingga m11 z. Terhadap garis m, vektor
F
memberikan sesuatu efek putar yang dinarnakan kopel atau momen dengan besardengan d adalah jarak garis l terhadap m, yaitu segmen garis yang tegak lurus terhadap garis i dan m. Arah vektorial dari momen diatur sesuai dengan aturan tangan kanan (atau sekrup) yang dinyatakan dengan panah berkepala rangkap. Lihat Garnbar 3.2b sebagai penjelasan.
ll,\Il 3 SIS1 1 M ( ,i\ Y i\ 17
Gaya translasi sebagai vektor dapat digolongkan atas tiga kelas, yaitu: (a) vektor bebas ifree
vectors), (b) vektor luncur (sliding vectors), dan (c) vektor tetap lfixed vectors). Vektor bebas merupakan vetor yang dapat direpresentasikan dalam garis kerja lain yang sejajar. Ini dapat divisualisir pada suatu sistem yang bergerak dengan arah dan besar pergerakan yang seragam. Dengan perkataan lain, garis kerja maupun titik tangkap dapat dipindahkan tanpa mengubah fenomena fisik. Vektor luncur adalah vektor dengan titik tangkap yang dapat dipindahkan di sepanjang garis kerja tanpa mengakibatkan perubahan fisik. Dalam wktor tetap, baik garis kerja maupun titik tangkap tidak dapat dipindahkan tanpa mengubah keadaan fisik. Lihat Gambar 3.3 seb�ai penjelasan. Dalam Gambar 3.3a, tidaklah mempengaruhi keadaan jika
dianggap gaya
F
bekerja difl' £2
atau£3
terhadap s�tem yang bergerak seragam. DalamGambar 3.3b dan 3.3c, keadaan sama saja jika dianggap
F
bekerja di titik tangkap A a tau B jikasistem terbuat dari bahan yang tidak berdeformasi. Dalam hal ini,
F
menjadi gaya luncur.Untuk bahan yang berdeformasi,
F
yang menangkap di titik B akan memberikan efek tekanan,dan
F
yang menangkap di A akan menumbuhkan efek tarikan. Dalam hal ini,F
adalah vektortetap.
(a) (b) (c)
GAM BAR 3 3 \ e·ktor 13eb,l'i, Luncur dan T etap
3.4 SISTE M VEKTOR GAYA
Umumnya, gaya-gaya dapat bekerja di arah dan garis kerja serta titik tangkap masing masing dalam ruangan sistem berada. Namun, seluruh vektor gaya yang bekerja pada suatu sistem yang sama satu sama lain dapat memiliki kaitan antara garis kerja dan titik tangkap. Beberapa kasus akan disajikan dalam paparan berikut.
(a) Sistem Gaya Konkuren
Ini adalah kasus dengan semua garis kerja gaya melalui satu titik; dengan perkataan lain, semua garis kerja berpotongan pada satu titik dalam ruang. Kasus ini memiliki sifat khusus, yaitu bahwa semua vektor gaya memberikan kopel total bernilai nol terhadap titik potong semua garis kerja. Juga, dimungkinkan bahwa titik potong tersebut adalah titik tangkap semua vektor gaya.
(b) Sistem Gaya Para lel
Dalam kasus ini semua garis kerja gaya saling sejajar dalam ruang. Dengan sudut pandang lain, semua garis kerja saling memotong di satu titik di tempat jauh tak hingga. Yang perlu diperhatikan dalam kasus ini, adalah bahwa sekalipun jumlah vektorial gaya di arah garis kerja yang sejajar itu kemungkinan bemilai nol, namun dapat terjadi kasus dengan keseluruhan gaya memberikan kopel total yang tidak nol terhadap sua tu garis sembarang. Ini akan dibahas secara lebih rind dalam paparan mengenai kriteria keseimbangan.
(c) Sistem Gaya Koplanar
18 MEKAMJ<A H'K N IK. STA llKA DALAM AN!I I .lS!S STRU KTUR RFRRFNTUK R/\N( ,J</\
Selanjutnya, dapat dihadapi kasus sistem gaya yang koplanar dan konkuren, atau koplanar paralel. Kasus semacam ini dijumpai pada sistem struktur dua dimensi (sistem struktur bidang). Untuk sementara, demi kemudal-.an visualisasi, bahasan disajikan dalam kasus sistem gaya koplanar. Bidang XY diambil sebagai bidang tempat bekerjanya sistem gaya. Dengan demikian, arah vektorial kopel gaya sejajar dengan sumbu Z.
3.5 OPE RAS! GAY A
Karena gaya adalah besaran vektor, maka semua operasi matematika yang berlaku bagi vektor, juga berlaku bagi gaya. Namun, dalam pasal ini hanya disajikan beberapa operasi yang lazim dijumpai dalam statika.
3.5. 1 Kesamaan Gayo
Perihal kesamaan gaya antara dua gaya
F1
danF2
dapat dinyatakan sebagai berikut. (a) Jika F1 danJ;
adalah vektor tetap, maka kedua gaya hanya sama apabila keduanya memilikigaris kerja, titik tangkap, arah, dan besar yang sama.
(b) Jika
i;
danF2
adalah vektor luncur, maka kedua gay a hanya sama apabila keduanya memiliki garis kerja, arah, dan besar yang sama.(c) Jika
i;
danF2
adalah vektor bebas, maka kedua gaya hanya sama jika keduanya memiliki arah dan besar yang sama, serta garis kerja yang sejajar.Untuk kesamaan dua gaya, dituliskan
I ).'1 \
3.5.2 Kebenawor
o n GovoPerihal keberlawanan antara dua gaya
F1
danf2
diatur sebagai berikut.(a) Jika
i;
danfz
adalah vektor tetap, maka kedua gaya berlawanan jika keduanya memiliki garis kerja, titik tangkap, serta besar yang sama, namun arah yang berlawanan.(b) Jika
i;
danfz
adalah vektor luncur, maka kedua gaya berlawanan jika memiliki garis kerja dan besar yang sama, namun arah yang berlawanan.(c) Jika
i;
danfz
adalah vektor bebas, maka kedua gaya berlawanan jika memiliki garis kerja yang sejajar, besar yang sama, namun arah yang berlawanan.Dalam kasus gaya yang berlawanan, dituliskan
I� = - atr1 1 1 11 + F2 ==
3.5.3 Perjumlohan Gaya
Perjumlahan dua gaya A dan B secara matematis dituliskan dalam bentuk
R = lf + B
(:1 4)
(3.5)
19
\ a)
:'vfetc.da Jafa.ran Genjang
Cara ini dapat diterapkan untuk gaya kelas vektor tetap dan luncur. Pandanglah dua vektor
I)
danF2
yang bek rja pada garis l1 dan h Ked�a \ ektor membentuk si tem gaya yangkonkuren dan koplanar. Pencarian vektor resultanf:a R mencakup penentuan garis kerja dan
be ar erta arah, yang dengan cara jajaran genjang dilakukan berikut. Lihat Gambar 3.4
untuk penjelasan.
(1) Pertama-tama, pilihlah titik sembarang
0
yang melaluinya, digambarkan dua garis yang masing-masing sejajar dengan£1
dan£2.
(2) Diukurkan dari titik
0
dengan skala yang betul, pada kedua garis itu digambarkan\'ektor
F1
danF2
.(3) Dengan kedua vektor dalam butir (2) sebagai sisi, digambarkan sebuah jajaran
genjang.
(4) Garis diagonal panjang serta besamya (sesuai skala) memberikan besar
R
serta garis yangsejajar dengan garis kerja
R
yang sesungguhnya.(5) Garis kerja
R
yang sesungguhnya diperoleh dengan menggambarkan garis yang sejajar dengan diagonal dalam Gambar 3.4b, pada Gambar 3.4a dan melalui titik potong£1
dan£2.
Metoda scgitiga hampir erupa dengan metoda jajaran
genjan .
Bedanya bila dibandingkan d ngan jajaran genjang adalah dalam metoda ini digambarkan segitiga (lihat Gambar 3.5) dengan urutan tindakan _ebagai berikut.(1) Pertama-tama, pilihlah suatu titik embarang
0
pada bidang gambar. Melalui titik ini, gambarkan garis yang sejajar dengan £1. Pada garis ini, pindahkanlah vektorI)
dengan skala yang benar dan titik0
seba ai awal/pangkal.20 MEKANIKA TEKNIK: STATIKA DALAM ANALISIS STRUKTUR BERBENTUK RANGKA
Hasil penggambaran disajikan dalam Gambar 3.5. Perhatikan bahwa segitiga yang diperoleh adalah setengah jajaran genjang seperti dalam proses hasil metoda jajaran genjang. Perhatikan
pula bahwa sesuai dengan
si fat komutatif penjumlahan vektor,
proses dapat dilakukan denganmenggambarkan
F2
terlebih dahulu.0
(b)
GAMBAR 3.5 Perjumlahan Gaya Dengan Metode Segitiga
Dalam metoda segitiga ini, ada beberapa hal yang penting dan perlu dicatat sebagai berikut.
Pertama, kedua vektor dan vektor hasil membentuk segitiga yang tertutup (lihat Gambar 3.5b). Kedua, vektor hasil berpangkal dari pangkal vektor yang pertama (tit:_Q<
0),
dan berujung pada ujung vektor yang kedua (titik B). Ketiga, dalam Gambar 3.5b, vektor R diapit oleh garis vektorfl
(OA) dan garis vektorFz
(AB). Dalam Gambar 3.5a, gari kerja vektor hasilR
diapit oleh el (yang sejajar dengan OA) dan f.2 (yang sejajar dengan AB). Semua pengamatan ini merupakan hal yang penting untuk dicamkan dalam proses penentuan besar, arah dan garis kerja vektor hasil. Pengamatan ini juga akan dimanfaatkan sepenuhnya dalam metoda poligon berikut ini.(c) Metoda Poligon
Untuk proses penentuan resultanta lebih dari dua gaya koplanar pada umumnya, semua garis kerja gaya tidak berpotongan pada satu titik potong. Metoda poligon yang merupakan pengembangan metoda segitiga, dapat digunakan sebagai berikut.
Agar jelas, tanpa mengurangi keberlakukan umum metoda, disajikan proses penentuan resultanta tiga gay a
1), F2
danF3
yang koplanar non-konkuren.(1)
Pertama-tama, dalam Gambar 3.6b gambarkanlah poligon gaya tertutup ABCDA, sehingga didapatkan besar, arah dan garis yang sejajar dengan garis kerja yang sebenamya. (2) Prosedur berikutnya tinggal untuk menentukan garis kerjaR
yang sebenamya dalamgambar a. Ini dilakukan dengan proses lanjutan sebagai berikut.
(i) Tetapkanlah suatu titik sembarang
0
pada Gambar 3.6b, tempat ditarik garis penghubung OA, BO, CO, dan DO.21
(vi) Akhimya, tentukanlah titik perpotongan c1 dan c4, yaitu titik
0'
dalarn Garnbar 3.6a, melalui mana garis se�jar denganR
pada Garnbar 3.6b ditarik untuk mendapatkan garis kerja resultanta R yang sebenarnya.Bukti hasil yang diperoleh ini adalah sebagai berikut. Perhatikanlah bahwa dapat dituliskan hubungan berikut. Dari Gambar 3.6b, diperolE�h bahwa
· . ·
-c
D
F1
= OA + OB(b)
otn ot(l1 " ,
Fz
= BO + OC = = - OB + OCF
3 = CO + OD = = -OC + ODR
=�
+F2
+�
= AO + ODVektor AO berada pada garis c1, vektor OB dan BO berada dalarn garis c2 dan saling meniadakan,
22 MEKANIKA fEKNIK ST ATIKA DAI AM ANAUSL'i STRUK flJR BERBENTUK RANCKA
AO dan OD merupakan ve�or yang meEJ.punyai garis kerja c1 d� c4, serta berfungsi sebagai dua vektor pengganti bagi
F 1, F 2
danF
3 untuk mendapatkan R . Ini juga sekaligus betarti bahwa garis kerja dari R haru� melalui titik potong c1 dan c4, yaitu titik 0' dalam Ga!!_tbar 3.6a. Garis m sebagai garis kerja R dapat digambarkan dengan menarik garis sejajar R (dalam Gambar 3.6b) melalui titik 0' dalam Gambar 3.6a.Metoda poligon juga dapat digunakan untuk menentukan resultanta gaya-gaya koplanar yang paralel. Dengan metoda grafis, ketelitian hasil yang diperoleh tergantung kepada ketelitian penggambaran garis-garis paralel dan pengukuran secara berskala. Penentuan letak titik
0
seyogianya dipilih sedemikian hingga garis-garis penghubung AO, BO dan sebagainya, membentuk sudut apit yang tidak terlalu tumpul atau terlalu tajam dalam gambar a.3.5.4 U raian Gaya
Proses uraian gaya dapat dipandang sebagai kebalikan dari proses perjumlahan. Uraian dari sua tu vektor gaya atas beberapa vektor pada garis-garis kerja yang diketahui berupa vektor vektor yang apabila dijumlahkan, akan memberikan kembali vektor gaya tunggal tersebut.
Untuk penjelasan, tinjaulah suatu vektor P yang bekerja menurut garis kerja m, dan yang ingin diuraikan atas dua vektor di arah garis £1 dan £2. Ketiga garis £1, £2 dan m adalah koplanar dan terletak pada bidang XY. Vektor urai
i)
danI;
pada masing-masing £1 dan £2 ditentukan sebagai berikut.(a) Pertama-tama, tentukanlah titik potong
0'
antara£1 dan
£2.
(b) Melalui titik potong tersebut, gambarkanlah suatu garis sejajar dengan m, dan dengan titik
0'
sebagai pangkal, gambarkanlah P pada garis tersebut. '(c) Kemudian, dengan garis tersebut sebagai diagonal dan £1 dan £2 sebagai sisi, gambarkanlah jajaran genjang dengan P sebagai diagonal panjang.
(d) Sisi diagonal pada
£1 dan £2 masing-masing memberikan
i)
danF;_.
Vektor P yang sudah terurai kemudian dapat diberi tanda (dengan dua garis) yang berarti P sudah terurai dan digantikan olehi)
danF2•
Lihat Gambar 3.7 sebagai penjelasan.23
Sekarang kita membahas uraian gaya pada tata sumbu Karte�us. Untuk kasus bidang (misalnya bidang
XY),
uraian suatu vektor gayaF
adalahFx
danFy
yang dapat dituliskan(1.h)
Jika selanjutnya sumbu
X
danY
masing-masing dilengkapi dengan vektor satuani
danJ,
maka Persamaan (3.6) dapat dituliskan dalam(3 7)
dcngan
} = f
dengan a sudut apit yang diukur dari sumbu
X
positif ke garis kerja vektor gayaF ,
seperti dalam Gambar 3.8. Perhatikan bahwa dalam hal ini, diperoleh hubungan= · r 2 \ -' +
( ' ')\ .) '
r
r" I
(1 arctan
7- .
y )
Fx
I
Fy
1
X0
GAN1BAR 3 8 l; raiJn Ca\ J Puda [ J t,l Sumbu
Dengan demikian, juga terlihat bahwa
Fx
danfy
adalah proyeksi dariF
masing-masing pada sumbuX
danY.
3.5.5 Perj u r n larian Gaya Secaro Anal itis
Kita sengaja membahas perjumlahan analitis gaya, setelah terlebih dahulu menyajikan uraian gaya secara analitis. Untuk jelasnya, tinjaulah dua vektor
1;
danF;
pada bidang datar yang dilengkapi dengan tata sumbu(X, Y)
seperti dalam Gambar 3.8a. Resultanta24
digambarkan secara grafis menurut aturan segitiga. Selanjutnya, kedua vektor dinyatakan dalam komponennya masing-masing pada sumbu
X
danY
menurut Persamaan (3.7); jadi,Dari gCJmbar terlihat bahwa
CU 2) dcngm
('\ l \ )
Dengan demikian, perj umlahan vektor secara analitis dapat dilakukan dengan menjumlahkan secara aljabar, komponen-komponen gaya pada tata sumbu ortogonal. Untuk perjumlahan lebih dari dua vektor, yaitu
F1, F2, . . . , Fn,
makaKeseimbangan adalah kriteria yang sangat penting dalam statika. Kriteria ini mengatur hubungan antar komponen yang bekerja pada suatu sistem yang berada dalam keadaan diam atau lebih sering dinamakan keadaan seimbang.
Dalam bahasan Pasal 2.3 dipaparkan hukum yang pertama Newton yang merupakan konsep
dasar keseimbangan. Kita akan mengembangkan konsep itu dalam Pasal 3.6 ini.
(a) Kcscmrbnllgau dengcw Cm1 Gra(is
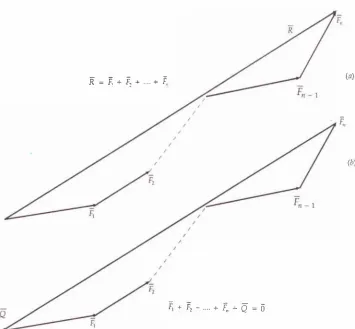
Tinjaulah kembali metoda poligon yang telah dibahas sebelumnya. Gaya-gaya
i), J;,
...,
F,,
dapat dijumlahkan untuk mendapatkan resultantaR
seperti dalam Gambar 3.9. Vektor R ,i), J;,
. . ., F,,
membentuk bentuk poligon, dengan pangkal R adalah pangkal vektor pertama, dan berujung pada ujung vektor yang terakhir. Jadif<. ...: �. + /- . + 1 6 )
Sekarang, ambillah sua tu vektor Q yang berimpit dengan garis kerja R , sama besar tetapi
berlawanan arah, sehingga
() =c
Penggabungan kedua Persamaan (3.16) dan (3.17) menghasilkan
F 1 + 1 2 + . . . + F, + Q = 0
( \ 1 7 1
llAil J SIST EM GAY 11 25
yang membentuk sistem gaya yang seimbang, sesuai dengan Persamaan (2.2). Dalam Gambar 3.9 disajikan sistem gaya yang seimbang ini. Menarik untuk dicatat bahwa keseluruhan vektor
F1, F2, ... , Fn ,
dan Q berangkat dari sua tu titik, dan berakhir di titik tersebut ( dari titik0
kembali ke0,
dari titik A kembali ke A, dan seterusnya). Jadi, dapat dituliskan dalam bentukT = F1 + F2 + . . . +
f,,
+ Q = 0(3.19)
denganf
dianggap perjumlahan semua gaya, namun dengan hasil T =0
(vektor nol). Kita mengetahui bahwa vektor memiliki komponen nol, sehingga(3.20)
untuk sistem bidang (dua dimensi).
Syarat dalam Persamaan (3.20) perlu, tetapi belum cukup berdasarkan alasan ilustratif sebagai berikut. Tinjaulah dua gaya
f;
danF2
dengan garis kerja sejajar, sama besar tetapi berlawanan arah. Kondisi dalam (3.20) jelas dipenuhi, namun terlihat bahwa sistem gayaf;
danF2
menghasilkan kopel sebesar(3.21)
R = � + F; + .
...
+ F. (n)F.,
(b)
/
F; + � - ---- + f. -'- Q = D
26 I f·K'\.IK � I -\ fiK.I I) ' I A�l •\ '\, _-\ l !�IS -,[ RL f-. ! 1 I{ lll'l\1.11 '" rt K R \".t K '
dengan adalah gaya kopel dengan sumbu
Z
sebagai arah vektorial. Untuk keseimbangan, maka nilai dari kopel harus nol; karena jika tidak, sistem akan berputar. Dengan demikian(:> 27)
Gabungan dari (3.20) dan (3.22) dapat disusun dalam syarat keseimbangan yang perlu dan cukup untuk sistem bidang,
yang segera dapat dikernbangkan untuk sistern ruang itiga dimensi) dalam bentuk
-- ·
-I.\ 1 , = L
' ' .( i.2:l)
Pada hakekatnya keseimbangan kopel dapat diambil terhadap poros sernbarang; artinya,
LMx = 0 dapat diambil terhadap suatu garis sembarang yang paralel dengan sumbu
X, 2.My
=0 terhadap garis yang paralel sumbu Y, dan seterusnya. Kondisi LEx = 0 dan
lf"
=0
dapat diambil terhadap dua arah lt dan f.2 pada bidang XY, dengan e, dan £2 saling teg
ak lurus.Kemudian, akan terlihat bahwa tiga kondisi dalam (3.16) dapat dituliskan dalam bentuk lain yang setara, rnisalnya keseimbangan gaya dan dua keseimbangan momen,
Ir = o
dan sebagainya. Yang penting untuk diingat adalah ada 3 persamaan keseimbangan untuk sistem bidang, dan ada 6 persamaan keseimbangan untuk sistem ruang, dengan sernua persamaan yang ada bebas satu sarna lain (linearly independent).
Selanjutnya, untuk kasus sistem gaya yang konkuren, keseimbangan gaya dalam persamaan 3.20 sudah merupakan syarat yang perlu dan cukup. Semua garis kerja berpotongan pada satu titik potong, akan mempunyai nilai momen nol terhadap titik potong tersebut sehingga syarat keseimbangan Per amaan 3.22 secara identik/ otomatis akan dipenuhi.
3 . 7 CONTO H P E N E RAPAN
Berikut ini diberikan beberapa contoh yang rnenyangkut operasi gaya. Dengan mengikuti contoh penerapan berikut ini, diharapkan pernahaman dan pengertian operasi gaya dapat dimantapkan.
CONTOH 3. 1 Dua vektor gaya F1 dan
F2
yang bertitik tangkap pada titik awal suatu tata sumbu Kartesius, rnasing-rnasing mernpunyai puncak (0, 4) dan (6,3). Tentukan vektorR
sebagai hasil perjumlahan kedua vektor tadi, dengan cara analitis.Penyelesaian
Karena vektor
1;
terletak pada surnbuY,
rnaka diperolehB.>.B 3 SISTEM GAY A
Vektor
F2
mempunyai garis kerja dengan koefisien arahsehingga
Dengan menggunakan Persamaan (3.15) diperoleh
sehingga
Liha t
Cam bar 1.10 sebagai pcnjclasan.
28 M � K A N I KA l T K N !K STAT!KA DALAM A N A LISJS STRUKTUR l3ERBEN fUK RAN< . K A
CONTOH 3.2 Ulangi kembali Contoh 3.1, namun dengan menggunakan metoda grafis jajaran genjang.
Penyelesaian:
Pertama-tama, gambarkan F1 dan
f2
dengan masing-masing puncakA(O,
4)
dan B(6, 3). DariA
danB dibuat jajaran genjang yang digambarkan secara
, skala yang betul dan teliti. Kedua garis sisi yang ditarik dari
A
dan B, bertemu pada titik C sebagai puncak dari resultantaR
. Besar dan arah vektorR
lalu diukur secara tepat dari gambar. Lihat Gambar 3.11 sebagai penjelasan. Jika untuk satu satuan_ vektor misalnya
Persam aan (3.30). Kesalahan tergantung dari kecermatan penggambaran serta pengukuran.
CONTOH 3.3 Kerjakanlah kembali soal Contoh 3.1, namun dengan cara segitiga.
Untuk menyelesaikan seperti terlihat dari Gambar 3.12, solusi dilakukan dengan dua urutan, pertama dengan
f2
terlebih dahulu, kemudian dari puncaknya digambarkan1) .
Yang kedua adalah menggambarkanf1
terlebih dahulu, lalu dari puncaknya digambarkanfz.
Hasil kedua urutan penggambaran sama, perbedaan hanya akibat ketelitian penggambaran.CONTOH 3.4 Sebuah ungkit digunakan untuk mengangkat bobot seberat W. Lengan ungkit memiliki panjang yang berbanding sebagai 1 : 2 seperti dalam Gambar 3.13. Hitung berapa gaya yang harus dikerjakan untuk dapat mengangkat bobot tersebut, dan berapa gaya total yang dipikul oleh dudukan.
29
dan hukum serta operasi matematis yang berlaku untcik
vektor/
juga berlakugaya. ., ··· · ·
·
(2)
.
. Untukpe�umlahan•
gaya,dapat
dipilih dua macam metoda� yaitu analitis dangr�is
..
J�a dalam c;;araanalitis
digunakan
operasimatematis
yang mern.berikan hasil (!k$ak;ll'laiq:t
ketelitian hasil . caragrafis
· tergantu.ngs�penuhnya kepada ke(:ern'iatan
penggambaran dan
pengukuran.
(J)
Untu.kperjw:n)ahan
caragrafis
gayarestlltanta
bera>.val pada awalgaya
pertama, danberujung
padaujnng
gaya terakhir, dengan catatanbahwa yang diambiltidak n1empengaruhi hasil. Untuk
cara
analitis, gayaresulta.nta
mcmiliki ... komponenyang merupakM
petjumlahan aljabar
darl.semua
kotnponenyill'lg
di beberapa arah yang satu sama. lain. ortogonal
(de:rigan perkat(lanlain,.
arah-yang bebas atu sama ·
':-30
. .::::·
·
):cul<up
ada.Iah bal'twa mofu�l'\ t�tal dari .te;rha�� suatu. titik sembarang·� ·· · harus noL Untuk
gaya-gay� y�g
ini
�
ipenuhi.3.9 SOAL-SOAL
Dalam soal-soal berikut ini, gaya-gaya mengambil satuan gaya tertentu, demikian juga ukuran jarak pada tata sumbu. Misalnya, dapat dianggap bahwa gaya diberikan dalam satuan kN, jarak dalam meter, dan sebagainya. Dalam mengerjakan soal-soal berikut, pilihlah sistem satuan yang konsisten.
Soal 3.1: Untuk sistem gaya planar dan konkuren
seperti dalam Gambar 3.14, tentukanlah
resultanta Gumlah) seluruh gaya dengan cara grafis dan analitis. Berikan data lengkap gaya resultanta tersebut (besar, garis kerja dan arah).
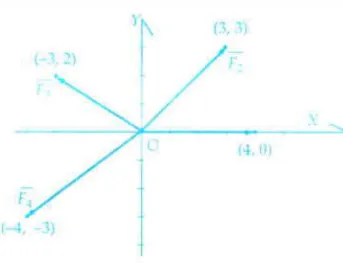
Soal 3.2: Tentukanlah resultanta sistem empat gaya planar nonkonkuren seperti dalam Gambar
3.15. Periksalah apakah sistem gaya tersebut memberikan suatu sistem yang seimbang? Berikanlah penjelasan selengkapnya.
Soal 3.3 : Periksalah apakah sistem tiga gaya planar
nonkonkuren dalam Gambar 3.16 mem berikan suatu sistem yang berseimbang? Lakukanlah analisis selengkapnya.
GAMBAR 3 . 1 5 Sistem Cava Snal 1 2
(-1, \j
31
•3.-l: Tentukanlah resultanta dari tiga gaya planar nonkonkuren seperti yang diperlihatkan dalam Gambar 3.17. Lakukanlah perjumlahan gaya dengan cara grafis dan analitis, serta bandingkan kedua hasil yang diperoleh.
Soal 3.5:
So.1l 3.6·
Soal
So.1l 3.8:
Untuk sistem gaya planar nonkonkuren dalam Gambar 3.18. Tentukanlah gaya
R
yang memberikan suatu sistem seimbang dengan tiga gaya lainnya. Lakukanlah proses penentuan keseimbangan dengan cara grafis dan cara analitis, serta bandingkan kedua hasil yang diperoleh.Dalam Gambar 3.19, diinginkan agar gaya
R
mengimbangi dua gaya horizontal laihnya pada bidangXY.
Berapa besar dan dimana garis kerja dari gayaR
yang ditanyakan? Lakukanlah proses dengan cara analitis.Gambar 3.20 memperlihatkan suatu papan kaku serta lurus sempurna dengan berat sendiri yang dapat diabaikan. Di atasnya
terletak sua tu silinder berbobot W yang berada
dalam keadaan diam di tengah papan. Berapa
besar gaya vertikal
R
yang diperlukan untuk membuat papan tepat pada saat terangkat? Berikan ulasan seperlunya, menyertai analisis yang saudara lakukan secara analitis.) I'
(1 1,
\1
�1----�·
�·
11'1 l t. 1,1/ •
Untuk sistem seperti dalam Gambar 3.21, tentukan besar gaya R yang membuat
sisitem berada di dalam keadaan seimbang. Berapa gaya tekan akibat papan kaku pada silinder? Lakukan analisis dengan cara analitis. Abaikan berat sendiri papan.
If I
32 ' 1'. ' • (vfEKANIKA. TEKNIK: STATIKA UM.AM AI\AI .ISIS STRUKTUR BERBENTUK RANGKA
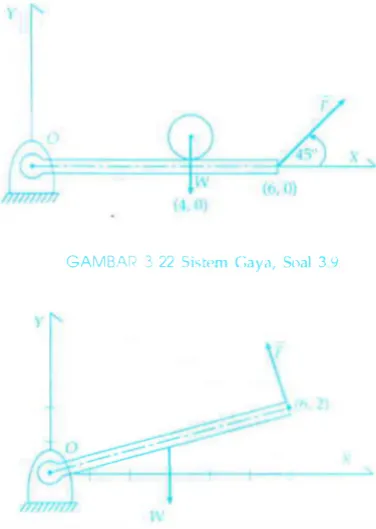
Soal 3.9: Suatu batang kaku dengan berat sendiri
yang dapat diabaikan, memiliki hubungan sendi yang dapat berputar dengan mulus (tanpa gesekan) pada ujung kiri. Di atasnya terletak suatu silinder berbobot W yang berada dalam keadaan diam, akibat sokongan gaya
F
dengan arah 45° dengan kedudukan
horizontal batang. Dengan cara analitis, tentukan besar gaya
F ,
serta reaksi yang timbul pada ujung sendi kiri. Lihat Gambar 3.22 untuk penjelasan.Soal 3.10:Gambar 3.23 memperlihatkan suatu sistem balok kaku dengan berat sendiri W yang dianggap bekerja pada tengah p anj ang, dengan ujung kiri yang ditahan dengan sendi yang mulus tanpa gesekan, sementara ujung lainnya ditahan dengan gaya F yang dikerjakan ortogonal dengan sumbu aksial batang. Dengan cara analitis, hitunglah besar gaya
F
serta reaksi dalam pada sendi ujung kiri.GAM B.A Q 3 22 Si'it<'m Caya, Soal 3 9
4
Pemodela n
Stru ktur
4. 1 U M U M
Sistem struktur terdiri dari titik-titik bermateri yang saling menyamb�mg dan akhimya membentuk suatu kesatuan. Tentu saja, sistem struktur mengambil bentuk dalam tata ruang, sesuai dengan kesinambungan topologi dari antar titik bermateri yang membentuk sistem tersebut. Sistem struktur dapat merupakan sistem yang sederhana a tau bahkan kompleks, baik dalam bentuk maupun dari sifat fisis, yang jika diikuti secara tepat, akan sulit dianalisis sebab tidak cukup sederhana.
Sebagai contoh, hubungan antara balok, pelat dan kolom yang masing-masing memiliki ukuran sendiri-sendiri, tidak memiliki suatu titik tunggal sebagai titik pertemuan. Demikian juga halnya dengan ujung komponen (misalnya kolom) yang ditumpu sebagai perletakan. Hal yang sama juga kita hadapi dalam aspek kontak antara beban luar dan sistem, yang dapat merupakan bidang kontak yang cukup kompleks. Dengan alasan tersebut, kita akan cukup sulit untuk menentukan model yang cukup sederhana yang dapat mewakili struktur sebenamya, kecuali jika diambil beberapa pendekatan atau asumsi/pemisalan. Sebagai contoh, balok dan kolom dianggap sebagai garis pada garis berat, sehingga pertemuan kolom dan balok menjadi suatu titik tunggal perpotongan antara garis berat kedua komponen.
Bab ini bertujuan untuk membahas aspek pemodelan sistem struktur atas suatu model diskrit yang terdiri atas komponen batang-batang yang saling disambungkan pada titik pertemuan. Sifat titik pertemuan didiktekan oleh cara pembuatannya (sambungan mekanis) atau oleh tuntutan dari sifat gaya luar yang bekerja. Pemodelan mencakup bahasan diskritisasi sistem struktur dan pemodelan gaya-gaya luar. Dengan demikian, tingkat pemahaman dan kemahiran dalam modelisasi sistem struktur sangat bermanfaat untuk dapat merepresentasikan problem struktur yang dihadapi secara cukup teliti, namun masih sederhana.
4.2 M O D E L DISKRIT STR U KTUR
34 Mf K A !\. I KA T F K N I K STATI Ki\ D-\1 /\ M A NAUSIS STRUKTL'R F[Rlllc:--.T U K RAN G K !\
tampang atau penampang sebagai lokasi dimana gaya-gaya reaksi perlu dihitung. Namun, demi kesederhanaan dan kehematan perhitungan, analisis dapat digunakan dehgan menggunakan sua tu model diskrit yang dipilih untuk merepresentasikan sistem yang sebenarnya.
Model diskrit sistem struktur berbentuk rangka adalah sua tu model yang diperoleh dengan membagi sistem atas beberapa bagian batang yang satu sama lain dihubungkan oleh titik simpul
(node). Titik simpul ini dapat diambil pada titik pertemuan, pada lokasi loncatan geometri, pada lokasi bekerjanya beban terpusat, dan pada perletakan. Dengan cara ini, sistem menjadi terbagi atas bagian kecil yang dinamakan elemen atau batang, berupa segmen lurus atau lengkung yang dibatasi dua titik simpul sebagai ujung.
Pada masing-masing tampang titik ujung batang bekerja gaya-gaya reaksi yang dapat dipandang berpasangan dengan gaya yang dikerjakan oleh batang pada titik simpul yang bersangkutan. Gaya-gaya yang dikerjakan oleh ujung-ujung batang yang bertemu pada suatu titik simpul, secara total bekerja pada titik simpul tersebut. Kriteria keseimbangan yang diterapkan atas semua batang dan semua titik simpul yang ada, menghasilkan persamaan yang dapat disusun sebagai sistem persamaan simultan dan lalu diselesaikan untuk menentukan besamya gaya-gaya reaksi.
Ada suatu sifat khusus elemen batang, yaitu fakta bahwa sekali gaya-gaya reaksi ujung telah dihitung, gaya reaksi pada suatu penampang dalam batang dapat dihitung cukup dengan menerapkan statika saja. Dengan demikian, pengambilan jumlah titik simpul dapat diusahakan seminimum mungkin.
Untuk jelasnya, tinjaulah suatu sistem struktur berupa balok menerus seperti dalam Gambar
4.1. Model diskrit dapat disusun dengan mengambil semua perletakan sebagai titik simpul. Sambungan sendi S dapat juga diambil sebagai titik simpul, sehingga digunakan tiga elemen, yaitu AB, BS, dan SC. Karena titik D sebagai lokasi bekerjanya gaya terpusat
P1
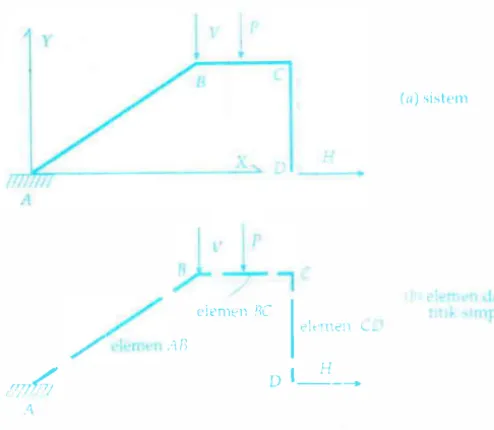
tidak dimbil sebagai titik simpul, dikatakan bahwa pada elemen AB bekerja beban lokal (atau beban elemen), yaitu beban yang bekerja dalam elemen (antara dua ujung A dan B). Juga, elemen SC mempunyai gaya P2 yang bekerja sebagai beban elemen di titik E.Sebagai contoh berikutnya, tinjaulah suatu sistem struktur berupa portal seperti dalam
Gambar 4.2. Dalam hal ini, titik perletakan A dan ujung bebas D harus diambil sebagai titik
simpul sebagai batas dari sistem. Kemudian, titik B dan C sebagai lokasi loncatan geometri
(patahan) diambil sebagai titik simpul. Dengan demikian, sistem struktur dimodel atas elemen
batang segmen lurus AB, BC, dan CD. Gaya
P
menjadi beban lokal atau beban elemen di atas,\ F)
cieme-n !lC
I
t>it'f11c'l1 L-711(
DI___:::
___A
GAMBAR 4 2 Dtskntis.Jsi rort<�l
35
(a) sistl'm
Sebagai rangkuman, pemodelan diskrit sistem struktur memberikan beberapa kemWlgkinan sebagai berikut.
a. Dengan pengambilan sistem atas beberapa elemen, diperoleh kemungkinan untuk menghitWlg reaksi dalam pada potongan di titik simpul, termasuk reaksi perletakan.
b. Pengambilan titik sambWlg sebagai titik simpul, diperoleh segmen/ elemen dengan bentuk yang lebih sederhana dan dapat diisolir dan ditinjau secara terpisah.
c. Peninjauan elemen demi elemen, serta titik simpul demi titik simpul, dapat menghasilkan sua tu analisis yang jauh lebih praktis dan sederhana, daripada analisis struktur keseluruhan.
4.3 TATA S U M B LJ
LOKAL DAf'J
G LO B .t�LPemodelan sistem atas model diskrit yang terdiri atas elemen dan titik simpul, memWlgkinkan pengaturan proses analisis yang dilaksanakan secara bertahap, yaitu tahap elemen atau bagian sistem, dan tahap keseluruhan struktur. Dalam tahap elemen, proses analisis dilakukan dengan menyatakan besaran elemen, seperti perpindahan dan gaya, yang lebih mudah dan praktis jika menggunakan sistem tata sumbu yang khusus digunakan Wltuk elemen itu sendiri. Tata sumbu elemen yang bersifat lokal ini dinamakan tata sumbu lokal. Jadi, masing masing elemen memiliki tata sumbu lokal sendiri. Tata sumbu lokal diambil dengan terlebih dahulu menetapkan ujWlg pertama dan kedua. Setelah itu, sumbu
X
lokal diambil berimpit dengan poros aksial yang mengarah dari titik ujWlg pertama ke ujWlg yang kedua. Sumbu lainnya diatur berikutnya, sedemikian hingga menuruti aturan tangan kanan seperti dalam bahasan Pasal 3.2.36 MEKANIKA TEKNIK- STI\TIKA [)1\L/\M ANI\ USIS STRUKTL R BERBEN fU K RI\!\JC K!\
Sebagai contoh, tinjaulah sistem struktur seperti dalam Gambar 4.2 yang kembali
digambarkan dalam Gambar 4.3. Sistem rangka ini dibagi atas elemen AB, BC, dan CD dengan
titik A, B, dan C sebagai titik ujung pertama untuk masing-masing elemen tersebut. Informasi
ini dapat diberikan dengan menyajikan suatu daftar yang memuat elemen-elemen dengan masing-masing titik pertama dan titik kedua yang bersangkutan. Ini dinamakan insidens elemen
(element incidences) seperti dalam Gambar 4.3a. Cara lain yang dapat digunakan untuk memberikan informasi ini adalah batang menurut urutan titik yang secara implisit menjabarkan
mana titik pertama dan kedua. Sebagai contoh, sebut elemen "CD" secara implisit menyatakan
bahwa titik C adalah titik pertama yang menjadi awal dari tata sumbu lokal elemen ini. Dengan
demikian, sumbu lokal untuk ketiga elemen terlihat dalam Gambar 4.3b. Hubungan tata sumbu
lokal elemen ke-i dengan tata sumbu global dikaitkan dengan sudut ai, yaitu sudut apit yang
diukur dari sumbu
X
positif ke sumbu xi positif dengan arah putaran positif (yaitu dariX
keY,
putaran dengan arah vektorial pada sumbu Z positif). Kaitan tersebut dinyatakan dalamhubungan transformasional (rotasi) yang mengambil bentuk sebagai
lx;
l
rl
eo:; a, sin a,O]jxl
y,J
= -sm a, c o s a10
YJ
:,
0
0 0 z
yang dalam notasi matriks dinyatakan dalam
lx,l
=[R,]
IX}Di lain pihak, dapat dituliskan hubungan sebaliknya dalam rumus