38
BAB 3
Akuisisi dan Pengolahan Data
3.1 Peralatan yang digunakanPada pengukuran TLS, selain laser scanner itu sendiri, receiver GPS tipe geodetik juga digunakan untuk penentuan posisi titik referensi yang akurat, berikut akan dijelaskan secara singkat tentang peralatan yang digunakan.
3.1.1 GPS
Pada survey Terestrial Laser Scanner untuk pemantauan longsoran, diperlukan titik referensi untuk melakukan proses georeferencing pada data ukuran. Baik dengan menggunakan metode backsight ataupun known azimuth, minimal diperlukan minimal dua titik referensi yang diketahui koordinatnya sebagai tempat berdiri laser
scanner pertama dan titik backsight untuk menentukan azimuth. Tipe GPS yang
digunakan adalah GPS Geodetik dengan strategi pengolahan data Differential GPS dimana titik ikatnya adalah titik CORS BAKOSURTANAL yang terletak di Bogor, Jawa Barat.
Dalam tugas akhir ini GPS receiver dan peralatan yang digunakan adalah: 1. Trimble 4000SSi Dual Frequency
2. Topcon HiperPro x 2 3. Statif x 3
4. Tribrach x 3 3.1.2 Laser Scanner
Instrumen laser scanner yang digunakan pada penelitian ini adalah Leica High Density Scanner Scanstation C10 dimana spesifikasi dari instrument ini bisa dilihat pada tabel 2.1.
Peralatan pembantu dalam pengukuran dengan Laser Scanner adalah: 1. Leica 6 inch HDS Target x 2
2. Leica Twin Pole Target dengan ekstension(0.45 m untuk target bawah dan 2.15 m untuk target atas)
3. Statif + (Untuk tempat menaruh HDS 6 inch target) x 2 4. Tribrach x 2
39 3.2 Proses Pengambilan Data
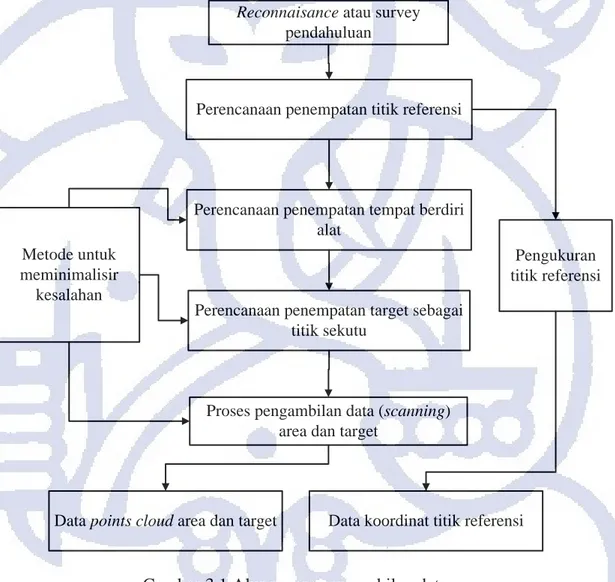
Pengambilan data dilakukan pada tanggal 1 April – 4 April 2012 di Desa Ciloto, Puncak. Terdapat beberapa tahapan yang dilakukan yang bertujuan memaksimalkan ketelitian yang didapat dan mengefektifkan kegiatan pengambilan data agar cepat dan akurat. Berikut adalah bagan pelaksanaan survey Terestrial Laser Scanner untuk pemetaan daerah longsoran.
Perencanaan penempatan titik referensi
Proses pengambilan data (scanning) area dan target
Perencanaan penempatan target sebagai titik sekutu
Reconnaisance atau survey pendahuluan
Perencanaan penempatan tempat berdiri alat
Metode untuk meminimalisir
kesalahan
Data points cloud area dan target
Pengukuran titik referensi
Data koordinat titik referensi
Gambar 3.1 Alur proses pengambilan data 3.2.1 Reconnaisance
Reconnaisance atau dalam bahasa Indonesia disebut “pengintaian” merupakan standar kegiatan yang dilakukan sebelum melakukan survey apapun di lapangan. Kegiatan reconnaisance penting untuk dilakukan karena dengan mengetahui bentuk dan keadaan dari daerah yang akan disurvey, surveyor akan memiliki gambaran yang
40 lebih baik tentang metode yang akan dilakukan kemudian hari saat pengambilan data berlangsung.
Dalam kegiatan reconnaissance untuk survey Terestrial Laser Scanning, terdapat hal-hal yang sangat penting untuk dilakukan yang akan dijelaskan sebagai berikut. 3.2.2 Penempatan Tempat Berdiri Alat
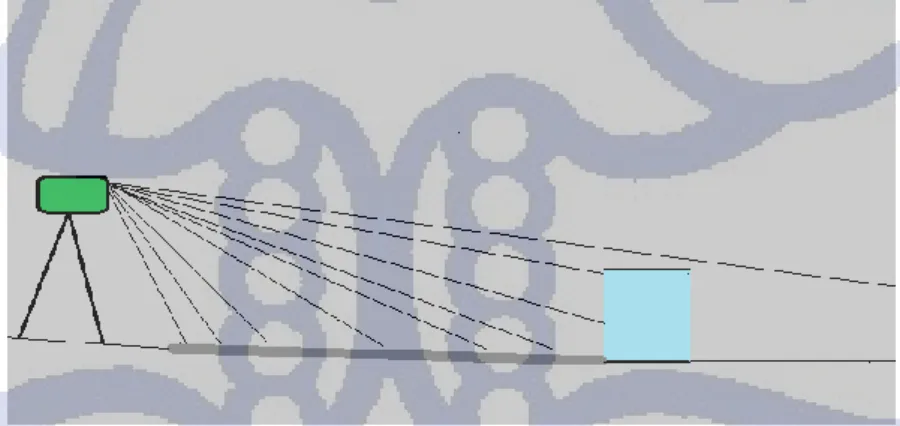
Tempat berdiri alat dalam survey TLS berkaitan dengan bagian mana saja yang akan terpetakan. Hal ini dikarenakan pulsa laser merambat dalam garis lurus sehingga apabila ada bagian yang terhalang oleh suatu objek dari sudut pandang suatu tempat berdiri alat, bagian itu tidak akan dapat tercakup dalam hasil. Untuk mengatasi permasalahan tersebut, perlu direncanakan tempat berdiri alat yang akan menutupi daerah yang tidak dapat terpetakan dari tempat berdiri alat sebelumnya.
Gambar 3.2 Cakupan dari satu tempat berdiri alat yang terhalang objek
Gambar 3.3 Daerah yang terhalang objek dapat dipetakan dari tempat lain Dengan perencanaan yang baik, bagian-bagian penting yang akan dipetakan dapat tercakup seluruhnya dengan baik sehingga tidak terjadi banyak celah pada data.
41 3.2.3 Penempatan Target
Pada kebanyakan pengukuran dengan laser scanner, tidak cukup hanya dengan dari satu sudut pandang atau tempat, pastilah diperlukan pengambilan data dari sudut pandang dan lokasi yang berbeda. Istilah untuk data dari satu kali pengambilan dalam terminologi laser scanner adalah Scanworld. Untuk menyatukan seluruh scanworld yang ada, diperlukan proses registrasi (pendaftaran atau penyatuan) dimana diperlukan sejumlah titik sekutu. Pada tugas akhir ini, metode yang dipilih adalah metode Target to Target sehingga titik sekutu yang digunakan berupa target yang sudah disediakan oleh pabrikan instrumen laser scanner itu sendiri yang disebut dengan HDS Target yang terdiri dari berbagai macam tipe.
Penempatan target mempunyai beberapa pertimbangan yaitu:
1. Target harus dapat terlihat dari minimal dua tempat berdiri alat yang berurutan
2. Penempatan target harus disebar secara merata agar ketelitian points cloud yang didapatkan juga merata
3. Target tidak boleh berubah posisi selama proses pengukuran (Untuk target yang diletakkan pada statif, dapat diputar untuk menyesuaikan arah dengan posisi scanner)
Menurut panduan pengguna yang dikeluarkan oleh pabrikan, untuk menghubungkan
dua scanworld yang berbeda, diperlukan minimal dua target. Namun dalam tugas
akhir ini, digunakan empat target sebagai ukuran lebih dan sebagai cadangan apabila terdapat target yang memiliki ketelitian rendah sehingga dianggap menggangu hasil pengukuran dan tidak bisa digunakan.
3.2.4 Penempatan Titik Referensi
Titik referensi diletakaan di lokasi awal pengukuran atau dekat dengan tempat berdiri alat pertama. Karena tujuannya untuk mendapatkan nilai azimuth, dua titik referensi haruslah saling terlihat satu sama lain karena di salah satu titik akan diletakkan target dan di titik lainnya akan menjadi tempat berdiri alat pertama. Selanjutnya titik
backsight harus di scan untuk diketahui posisinya terhadap scanner pada tempat
42 Gambar 3.4 Titik referensi GPS3 untuk keperluan backsight
Faktor obsruksi terhadap langit harus diperhatikan juga apabila titik referensi akan diukur terlebih dahulu dengan GPS tipe geodetik. Apabila terlalu banyak obstruksi, maka hasil ukuran GPS akan buruk dan koordinat titik referensi yang buruk akan berpengaruh pada seluruh hasil scan
3.3 Proses Pengambilan Data
Proses pengambilan data akan dijelaskan sebagai berikut sesuai langkah-langkah pengerjaannya.
3.3.1 Pengukuran titik Referensi
Sebelum melakukan pengambilan data dengan TLS, terlebih dahulu dua buah titik referensi sebagai tempat berdiri alat pertama dan titik backsight diukur dengan menggunakan GPS tipe geodetik dengan lama pengukuran 12 jam.
Pada tugas akhir ini, kedua titik tersebut diberi nama GPS3 dan REFA dimana koordinat geosentrik dari kedua titik tersebut setelah melalui pemrosesan dengan software Bernese 5.0 dengan Base CORS BAKOSURTANAL adalah
Tabel 3.1 Nilai koordinat geosentrik titik referensi
Nama X Y Z
GPS3 -1852577.3330 m 6059189.7246 m -740547.2416 m REFA -1852600.8215 m 6059179.0125 m -740545.1120 m
43 3.3.2 Proses Scan Area
Metode pengambilan data yang dipilih adalah dengan cara menempatkan empat buah target yang terlihat dari tempat berdiri alat ke n dan n+1, sehingga proses registrasi yang digunakan dengan teknik pengambilan data seperti ini adalah target to target registration. Metode ini dipilih karena beberapa kelebihan yaitu:
1. Titik referensi yang diketahui cukup berjumlah dua buah di awal pengukuran saja.
2. Ketelitian yang diberikan relatif lebih baik dibanding dengan metode lainnya terutama untuk pengambilan data di daerah terbuka.
Sedangkan kekurangan dari teknik registrasi target to target adalah:
1. Diperlukan perencanaan tempat berdiri alat dan target yang baik, terutama pada tempat target karena ketelitian pengukuran akan semakin baik pada objek yang dekat dengan target. Dan semakin jauh objek dari target maka akan semakin buruk pula ketelitiannya sehingga penyebaran target harus merata.
2. Target tidak boleh bergerak selama pengukuran, apabila target bergerak maka akan menjadi sumber kesalahan yang cukup fatal bagi keseluruhan pengukuran.
Metode traversing tidak dipilih karena memberikan ketelitian dibawah metode target to target, sedangkan hasil yang diinginkan adalah yang memberikan ketelitian sebaik mungkin karena menyangkut pemantauan zona longsoran.
Untuk metode registrasi cloud to cloud tidak dipilih karena objek yang discan pada pemantauan longsoran adalah permukaan tanah sehingga akan sulit untuk menemukan titik-titik yang sama (common point) untuk proses registrasi cloud to
cloud, registrasi cloud to cloud juga menuntut pertampalan antar scanworld sebesar
60% yang sulit untuk dilakukan mengingat banyaknya obstruksi di daerah pemetaan. Sedangkan dari faktor ketelitian, metode registrasi cloud to cloud sudah pasti dibawah target to target, karena itulah metode ini tidak dipilih.
Dari seluruh proses scan didapatkan tujuh scanworld yang selanjutnya akan dinamai dengan scanworld 1-7. Tahapan pelaksanaannya adalah sebagai berikut:
44 1. Pasang dan lakukan proses centering alat laser scanner pada tempat yang
telah direncanakan sebelumnya sebagai tempat berdiri alat.
Gambar 3.5 Proses centering laser scanner
2. Pada tempat berdiri alat pertama, lakukan scan target ke titik backsight yang telah ditentukan untuk keperluan georeferencing saat pengolahan data kemudian.
3. Pasang target di tempat yang telah direncanakan sebelumnya, pastikan target terpasang dengan kokoh dan stabil.
4. Cek ulang apakah target terlihat dari alat dan dari tempat berdiri alat selanjutnya.
Gambar 3.6 HDS Target 6 inch dan Twin Pole Extended
5. Proses scan dan proses pengambilan target dapat diubah urutannya sesuai keinginan, namun yang penting adalah penamaan target. Target yang sama harus memiliki nama yang sama pula saat diambil dari tempat berdiri alat yang berbeda. Untuk mempermudah penamaan, lebih baik jika situasi pemetaan dibuat sketsa yang dilengkapi posisi target dan tempat berdiri alat.
45 6. Setelah proses scan pada tempat berdiri alat n, pindahkan alat ke tempat berdiri alat n+1. Target tidak dipindahkan namun diputar agar terlihat dari tempat berdiri alat n+1. Proses pemutaran target harus dilakukan dengan hati-hati agar tidak sampai merubah posisi dari target itu sendiri.
7. Scan target yang telah diputar dari tempat berdiri alat n+1. Setelah target
discan, pindahkan target ke posisi selanjutnya yang terlihat dari tempat berdiri alat n+1 dan n+2.
8. Selanjutnya langkah-langkah diatas diulangi sampai tempat berdiri alat terakhir.
3.3.3 Meminimalisir Kesalahan
Seperti telah dijelaskan pada bab 2.7 , terdapat berbagai sumber kesalahan pada pengukuran dengan TLS. Untuk meminimalisir kesalahan-kesalahan tersebut, dilakukan berbagai metode menurut kesalahan yang akan diminimalisir.
Metode yang dilakukan untuk meminimalisir kesalahan adalah:
1. Proses scan dilakukan pada cuaca dengan kondisi normal, tidak berkabut atau hujan karena akan mempengaruhi hasil scan
2. Untuk koreksi suhu dan tekanan, sudah terdapat sensor didalam instrument laser scanner yang akan mengkoreksi data ukuran secara otomatis terhadapa perubahan suhu dan tekanan.
3. Untuk kesalahan karena pergerakan alat, telah terdapat auto kompensator dialam instrumen laser scanner yang digunakan sehingga pergerakan alat yang relatif kecil akan dapat dihilangkan efeknya oleh auto kompensator. Namun pada saat scan pertama dimana instrumen diletakkan pada area yang relatif dekat dengan jalan raya, sempat terjadi dua kali kejadian dimana pergerakan alat melampaui batas toleransi auto kompensator sehingga proses scan harus diulang. Hal ini diperkirakan karena getaran dari kendaraan yang melewati jalan raya.
4. Target ditempatkan pada tempat yang stabil dan jika target harus diputar maka proses memutar target dilakukan dengan hati-hati agar tidak merubah posisi target.
46 3.4 Proses Registrasi
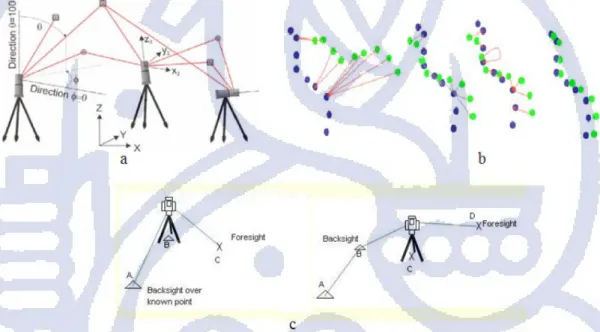
Metode registrasi yang digunakan adalah target to target seperti yang telah dijelaskan sebelumnya. Proses registrasi target to target terbilang sangat mudah terutama apabila titik-titik target direncanakan dengan baik dan memiliki penamaan yang teratur sehingga software Cyclone akan langsung mengenali target dan melakukan registrasi secara otomatis. Dalam menu project, perlu dibuat registrasi baru untuk pemrosesan registrasi agar perubahan yang dilakukan tidak mengganggu data aslinya, registrasi dapat dibuat beberapa buah sehingga apabila digunakan metode registrasi yang berbeda, hasil yang didapatkan dapat dibandingkan.
Scanworld yang mengandung titik referensi didalamnya harus dijadikan home
scanworld sehingga pada proses registrasi, scanworld lainnya akan mengikuti
perubahan pada home scanworld.
Gambar 3.7 Ilustrasi tiga metode registrasi a) Target to Target b) Cloud to Cloud c) Traverse (Pfeifer, 2007)
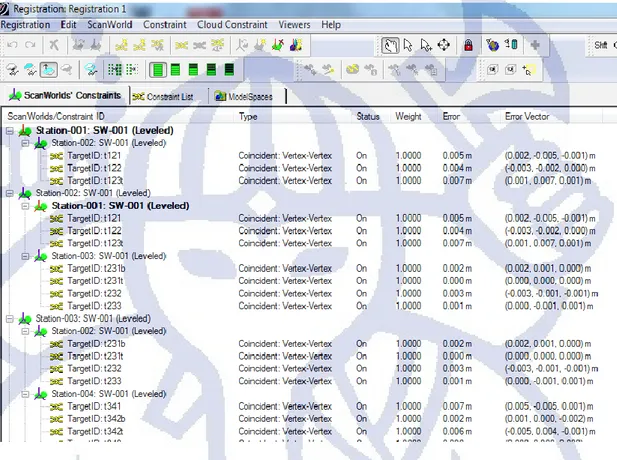
Hasil dari proses registrasi adalah nilai ketelitian target yang digunakan sebagai titik sekutu, target yang digunakan dapat dikurangi atau ditambah untuk mengubah nilai ketelitian yang didapatkan selama jumlah target yang digunakan antar scanworld sebanyak minimal dua buah terpenuhi. Nilai ketelitian target mewakili nilai ketelitian posisi suatu titik di points cloud dimana target tersebut terdapat relatif terhadap posisi home scanworld.
47 Gambar 3.8 Hasil proses registrasi
Koordinat tempat berdiri alat bisa didapatkan dari hasil report registrasi yang menyatakan translasi dari titik [0:0:0] setiap scanworld seperti pada gambar berikut.
48 Nilai translasi tersebut kemudia ditambahkan ke nilai koordinat titik [0:0:0] pada scanworld 1 yaitu pada titik referensi REFA, sehingga didapatkan koordinat setiap tempat berdiri alat yang dapat dilihat pada tabel berikut.
Tabel 3.2 Koordinat tempat berdiri alat pada tiap station dalam UTM Station Northing(m) Easting(m) Elevation(m)
1 9257762.58 721197.68 1352.19 2 9257681.568 721252.566 1349.692 3 9257652.311 721238.797 1337.068 4 9257602.473 721229.239 1325.447 5 9257575.241 721248.121 1320.799 6 9257543.967 721267.339 1308.511 7 9257509.076 721239.523 1311.091
Tabel 3.3 Koordinat tempat berdiri alat pada tiap station dalam Geodetik Station Latitude(o) Longitude(o) Elevation(m)
1 6 42 39.10 S 107 0 3.86 E 1352.19 2 6 42 41.73 S 107 0 5.65 E 1349.692 3 6 42 42.69 S 107 0 5.21 E 1337.068 4 6 42 44.31 S 107 0 4.91 E 1325.447 5 6 42 45.19 S 107 0 5.52 E 1320.799 6 6 42 46.21 S 107 0 6.15 E 1308.511 7 6 42 47.35 S 107 0 5.25 E 1311.091
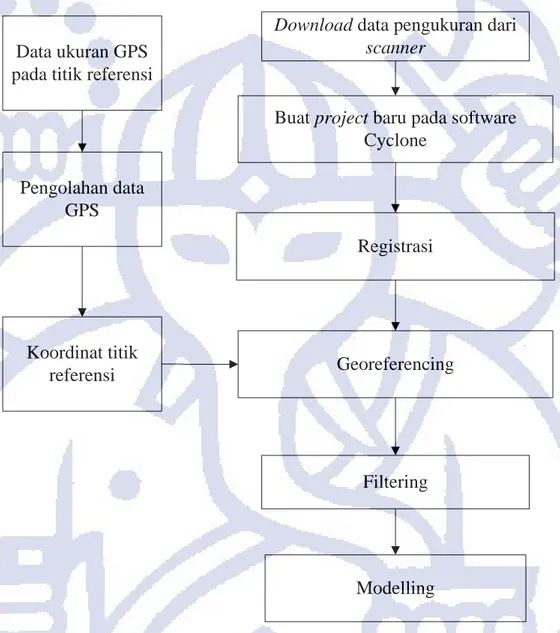
Alur kerja untuk menghasilkan data points cloud yang sudah bergeoreferensi dan teregistrasi dapat mengikuti alur kerja seperti pada gambar 3.8.
49 Buat project baru pada software
Cyclone
Filtering Georeferencing
Download data pengukuran dari scanner Registrasi Koordinat titik referensi Modelling Data ukuran GPS
pada titik referensi
Pengolahan data GPS
Gambar 3.10 Bagan proses registrasi
Setelah melalui proses registrasi, seluruh scan akan terkumpul dalam satu points cloud. Apabila data pengamatan GPS belum diolah pada saat pengambilan data berlangsung, pengaturan yang digunakan untuk pengambilan data adalah pengaturan standar dimana koordinat titik referensi dimasukkan kemudian saat proses georeferencing. Namun apabila nilai koordinat titik referensi sudah didapatkan sebelum proses pengambilan data TLS dimulai, proses pengambilan data bisa menggunakan pengaturan known backsight atau known azimuth yang ada pada scanner
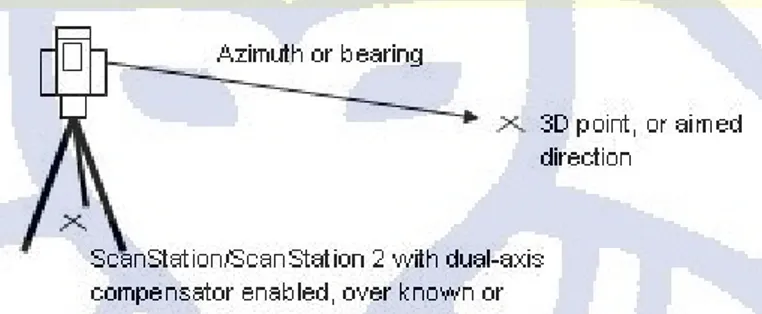
50 3.5 Proses Georeferencing
Proses georeferencing dilakukan dengan cara mengganti koordinat titik berdiri alat pertama (REFA) dan titik backsight (GPS3) pada data yang telah teregistrasi. Karena titik yang diganti koordinatnya merupakan titik yang terdapat pada home scanworld (scanworld utama) maka seluruh titik yang terdapat pada scanworld akan mengikuti perubahan yang terjadi.
Gambar 3.11 Prinsip georeferencing dengan satu titik dan azimuth
Dengan melakukan hal tersebut, maka seluruh titik yang ada pada scanworld sudah bergeoreferensi, dan memiliki koordinat relatif terhadap datum yang digunakan. Karena koordinat yang digunakan adalah koordinat dari pengukuran GPS dengan elipsoida referensi WGS84 dan sistem koordinat geodetik, maka seluruh titik pada scanworld pun memiliki sistem referensi yang sama.
Pada tugas akhir ini, koordinat tempat berdiri alat pertama secara default adalah [0 : 0 : 0], sedangkan alat berdiri di atas titik REFA dengan ketinggian yang telah diukur. Maka terlebih dahulu dibuat point baru yang berada pada titik REFA dalam scanworld pertama yaitu titik [0 0 0] yang dikurangi tinggi alat. Tinggi alat pertama adalah 1.441 m, maka titik REFA yang merupakan tempat berdiri alat pertama berada pada [0 : 0 : -1.441].
51 Selanjutnya titik referensi kedua yang digunakan juga harus dimasukkan kedalam scanworld. Pada target GPS3B yaitu bagian bawah twinpole extended yang memiliki ketinggian 0.45m dari permukaan titik. Didapatkan koordinat lokalnya [7.816 : 24.426 : 2.607]. sehingga koordinat lokal titik GPS3 adalah
[7.816 : 24.426 : (2.607-0.45)] = [7.816 : 24.426 : 2.157]
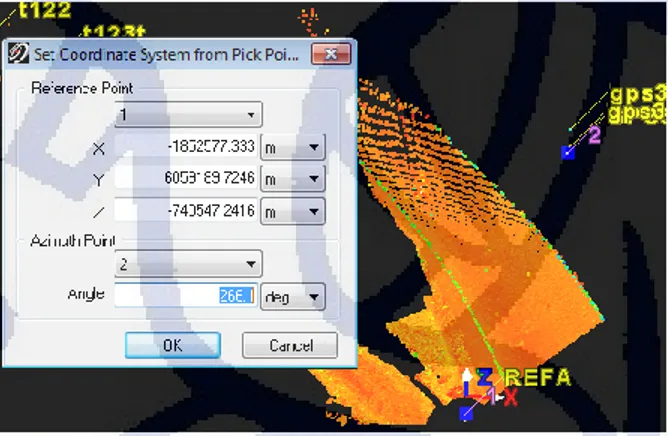
Langkah selanjutnya adalah menentukan azimuth dari kedua titik referensi, mengapa tidak dilakukan proses georeference menggunakan dua buah koordinat melainkan satu koordinat dan azimuth akan dijelaskan di bab analisis. Melalui perhitungan didapat azimuth dari REFA ke GPS3 adalah 266.1 derajat. Masukkan nilai koordinat REFA dan azimuthnya ke GPS3
Gambar 3.13 Proses georeferencing dengan satu titik referensi dan azimuth Setelah selesai, maka scanworld 1 sudah bergeoreferensi, langkah selanjutnya adalah melakukan registrasi ulang. Karena scanworld 1 merupakan home scanworld (scanworld yang digunakan sebagai referensi utama), maka scanworld selanjutnya yang terikat terhadap scanworld 1 akan mengikuti perubahan akibat proses georeference dan berlanjut sampai scanworld 7.
3.6 Proses Filtering Data
Untuk pemetaan zona longsor yang berada di daerah perbukitan yang juga merupakan daerah pemukiman, proses filtering (penyaringan) merupakan tahapan terpenting untuk mendapatkan data yang kongkrit dan akurat. Produk akhir yang diinginkan adalah berupa model tiga dimensi permukaan tanah sehingga objek-objek lain selain permukaan tanah harus dihilangkan. Kesulitan utama terdapat pada objek rerumputan yang banyak terdapat di zona longsor Ciloto.
52 Metode untuk memfilter rerumputan dibagi menjadi dua, yang pertama adalah dengan menggunakan metode filter secara manual dimana objek yang tidak diinginkan dihapuskan dari points cloud menggunakan software Cyclone, untuk zona rerumputan, tinggi rata-ratanya diukur dan dicatat kemudian digunakan untuk menghapus objek tersebut dari points cloud
Metode kedua adalah dengan menggunakan fungsi find ground yang terdapat pada software Cyclone II Topo yang merupakan fungsi untuk mencari permukaan tanah pada suatu points cloud. Algoritma yang digunakan adalah permukaan tanah dianggap berada pada titik terendah yang didapatkan dari hasil scan. Fungsi find ground ini dicoba untuk menguji apakah hasilnya dapat baik dan dapat digunakan untuk memfilter data sehingga hanya didapatkan data permukaan tanah saja.
Gambar 3.14 Data points cloud sebelum proses filtering
3.6.1 Filtering Manual
Pada tahap pertama, noise dan titik-titik yang berada diluar area zona longsor dihilangkan terlebih dahulu. Selanjutnya, objek-objek berupa bangunan, pohon, semak belukar dan vegetasi lain dihapuskan dari scanworld dengan menggunakan fungsi fence.
53 Gambar 3.15 Filtering manual
Selanjutnya, points cloud akan terbebas dari objek yang tidak diinginkan yang berukuran cukup besar sehingga dapat dihilangkan secara manual. Permukaan tanah yang sepenuhnya tertutup oleh vegetasi terpaksa harus dihilangkan seluruhnya karena dianggap tidak akan memberikan data permukaan tanah yang relevan.
Untuk daerah dengan vegetasi, digunakan metode dengan menghitung rata-rata tinggi dari rerumputan di suatu daerah sehingga nilai ketinggian tersebut dapat digunakan untuk memfilter objek berupa vegetasi dari permukaan tanah. Untuk melakukannya, setiap zona yang ditumbuhi rerumputan harus dibagi kedalam layer yang berbeda dan difilter secara terpisah karena kondisi vegetasi yang berbeda-beda pada tiap area.
54 Gambar 3.16 Data point clouds setelah difilter
3.6.2 Filtering Metode Find Ground
Untuk metode ini, points cloud yang ada harus diekspor kedalam format .cwf agar dapat dikerjakan oleh software Cyclone II Topo.
Gambar 3.17 Ekspor points cloud ke format .cwf
Selanjutnya dengan fungsi find ground, software Cyclone II Topo akan mencari titik yang dianggap permukaan tanah secara otomatis dan membuat mesh dari titik-titik tersebut sehingga keluarannya berupa model yang sudah memiliki permukaan dalam bentuk TIN (Triangle Irregular Network) yang dihasilkan dari titik-titik pada points cloud.
3.6.3 Filtering Metode Intensity Cut
Objek yang dipetakan akan memantulkan pulsa laser dalam intensitas yang berbeda tergantung dari kecerahan objek tersebut. Pada kasus penyediaan data pemantauan longsoran dimana data yang diperlukan adalah data permukaan tanah, dapat
55 dilakukan pemisahan points cloud berdasarkan intensitas pantulan sinar laser yang diterima oleh scanner. Hal pertama yang harus dilakukan adalah melakukan smapling intensitas dari objek yang akan dipisahkan, pada kasus ini permukaan tanah. Berdasarkan sampling di area yang diketahui merupakan permukaan tanah, didapat intensitas pantulan dari tanah maksimal 2,05, sehingga objek dengan intensitas pantulan diatas itu dapat dipisahkan.
Setelah dilakukan pemisahan berdasarkan intensitas (intensity cut), points cloud akan terbagi menjadi dua sesuai batasan intensitas yang kita berikan. Sebagian besar points cloud dengan intensitas dibawah 0.205 merupakan permukaan tanah, namun tetap terdapat sejumlah noise yang harus dibersihkan secara manual.
3.7 Pembuatan model permukaan tiga dimensi
Model permukaan yang dibuat pada tugas akhir ini dibuat beberapa buah: 1. Model yang dibuat langsung dari data yang belum difilter menggunakan
Cyclone II Topo (Model I). Permukaan tanah dicari dengan fungsi find ground.
56 Gambar 3.18 Model I
2. Model yang dibuat dari data yang telah difilter secara manual dan kemudian dibuat model permukaannya oleh Cyclone II Topo (Model II). Perangkat lunak akan secara otomatis melakukan fungsi find ground terlebih dahulu terhadap points cloud yang akan diproses tersebut.
Gambar 3.19 Model II
3. Model yang dibuat dari data yang telah difilter dan kemudian dikonversikan menjadi mesh (TIN) dan peta kontur. Peta kontur dibuat dengan tujuan agar lebih mudah menginterpretasikan data dalam format dua dimensi (2D).
Dari hasil proses filtering, didapat hasil dari metode filtering intensity cut digabungkan dengan metode filtering manual menghasilkan hasil yang paling baik. Model tiga dimensi yang dihasilkan dapat dilihat pada gambar dibawah ini.
57 Gambar 3.20 Mesh yang dihasilkan dari points cloud yang telah difilter
Mesh dibuat dengan toleransi perbedaan permukaan dengan point pembentuknya sebesar 1mm sehingga nilai kesalahan sebesar 1mm harus dimasukkan kedalam nilai total error.
Setelah dijadikan mesh, kontur dibuat dengan garis kontur mayor 2 meter dan kontur minor 1 meter. Hasilnya dapat dilihat pada gambar 3.19
58 Gambar 3.21 Kontur yang dihasilkan dari mesh pada gambar 3.18