PERANCANGAN KOMPENSATOR PI – LEAD PADA KESTABILAN TEGANGAN BUCK CONVERTER
Irma Husnaini1 Asnil2
ABSTRACT
This paper describes a combination two compensators are PI and Lead compensators to control the buck converter output voltage to remain stable in a state of load changes. PI Compensator can eliminate steady state error at the time but have a system transient response is not good. While the lead compensator has an excellent transient respon system but can not eliminate errors in steady state conditions. In this research the buck converter output remained stable at 5 volt even though the load changed from 1 kOhm to 100 Ohm. The results showed a combination of both compensator can control the output voltage of the buck converter remained stable at 5 volt despite load changes.
Keyword: Buck converter, compensators PI-Lead INTISARI
Penelitian ini bertujuan untuk pengendalian tegangan keluaran buck converter agar tetap stabil dalam keadaan perubahan beban. Kontroler yang digunakan pada pengendalian ini merupakan gabungan dari dua kompensator yaitu kompensator PI dan Lead. Kompensator PI mampu menghilangkan kesalahan pada saat keadaan tunak tetapi memiliki respon transien sistem yang kurang baik sedangkan kompensator Lead memiliki respon transien sistem yang baik namun tidak dapat menghilangkan kesalahan pada kondisi keadaan tunak. Pada penelitian ini diinginkan keluaran buck converter tetap stabil sebesar 5 volt meskipun beban berubah dari 1K menjadi 100. Hasil penelitian menunjukkan gabungan dari kedua kompensator tersebut dapat mengontrol tegangan keluaran dari buck converter tetap stabil sebesar 5 volt meskipun terjadi perubahan beban .
Kata Kunci : Buck converter, kompensator Lead dan PI
1 Dosen Jurusan Teknik Elektro Fakultas Teknik UNP 2 Dosen Jurusan Teknik Elektro Fakultas Teknik UNP
PENDAHULUAN
Seiring dengan perkembangan dan kemajuan teknologi, peningkatan terhadap kebutuhan konverter daya dengan kinerja dinamik yang tinggi dalam banyak aplikasi sangat dirasakan terutama di industri dan penggunaan barang-barang elektronik. DC-dc konverter merupakan salah satu contohnya, dimana konverter ini bisa menghasilkan tegangan atau arus yang dapat diatur sesuai dengan keinginan yang berasal dari power supply atau baterey. Buck konverter merupakan rangkaian elektronika daya yang berfungsi menurunkan tegangan dc menjadi tegangan dc lain sesuai kebutuhan [1]. Pemilihan konverter dc-dc dikarenakan efisiensinya yang tinggi dalam perubahan daya input ke daya output. Diantara beberapa kriteria kinerja dinamik yang sangat penting untuk dipertimbangkan adalah riak, tegangan output, dan waktu recovery. Keuntungan pada konfigurasi Buck antara lain adalah efisiensi yang tinggi, rangkaiannya sederhana, tidak memerlukan transformer, riak (ripple) pada tegangan keluaran yang rendah sehingga penyaring atau filter yang dibutuhkan pun relatif kecil.
Kekurangan dari konfigurasi
buck konverter adalah hanya satu
keluaran yang dihasilkan, dan tingkat ripple yang tinggi pada arus masukan. Umumnya tegangan output berubah berdasarkan variasi beban atau akibat perubahan tegangan input. Perubahan nilai tegangan output tergantung pada filter induktor dan nilai kapasitor dalam rangkaian dan frekuensi switching serta algoritma kontroler. Jika induktor, kapasitor dan frekuensi switching tetap, perbedaan algoritma kontroler menghasilkan perbedaan respon dinamik. Beberapa hal harus dilakukan untuk memperbaiki respon dinamik tersebut. Oleh karena itu sangat penting menentukan
kemungkinan kinerja dinamik terbaik untuk konverter daya. Untuk memperbaiki kinerja sistem dibawah variasi beban diperlukan kontroler.
Metode-metode atau algoritma kendali yang digunakan kontroler dalam proses pengendalian juga telah banyak berkembang. Penggunaannya disesuaikan dengan kebutuhan pengguna akan performansi atau efisiensi tertentu. Makin beragamnya jenis-jenis peralatan yang akan dikontrol melahirkan tuntutan akan kontroler yang dapat menanggani bermacam-macam jenis plant. Beberapa model kendali yang dikenal diantaranya adalah kompensator PI dan kompensator Lead. Agar kinerja dinamik konverter dc-dc terbaik dapat dicapai, kedua kompensator tersebut dapat digunakan untuk memperbaiki kinerja sistem dibawah variasi beban. Kompensator PI mampu menghilangkan kesalahan pada saat keadaan tunak tetapi memiliki respon transien sistem yang kurang baik sedangkan kompensator Lead memiliki respon transien sistem yang baik namun tidak dapat menghilangkan kesalahan pada kondisi keadaan tunak. Pada penelitian ini gabungan dari kedua kompensator tersebut diharapkan dapat saling menutupi kekurannya dan mampu untuk mengontrol keluaran dari buck converter agar tetap stabil meskipun terjadi perubahan beban.
PENDEKATAN PEMECAHAN MASALAH
Buck converter
Buck converter merupakan jenis konverter yang banyak digunakan dalam industri, khususnya mengenai catu daya. Konverter ini mengkonversikan tegangan dc menjadi tegangan dc lain yang lebih rendah (Tegangan input lebih besar dari pada tegangan out put). Buck
converter terdiri ari satu saklar aktif
(dioda). Untuk tegangan kerja yang rendah, saklar pasif sering diganti dengan saklar aktif sehingga susut daya yang terjadi bisa dikurangi. Kedua saklar ini bekerja bergantian. Setiap saat hanya ada satu saklar yang menutup. Nilai rata-rata tegangan keluaran konverter sebanding dengan rasio antara waktu penutupan saklar aktif terhadap periode pensaklarannya (faktor kerja).
Nilai faktor kerja bisa diubah dari nol sampai satu. Akibatnya, nilai rata-rata tegangan keluaran selalu lebih rendah dibanding tegangan masukannya. Buck converter bisa disusun paralel untuk menghasilkan arus keluaran yang lebih besar. Jika sinyal ON-OFF masing-masing konverter berbeda sudut satu sama lainnya sebesar 3600/N, yang mana N menyatakan jumlah konverter, maka didapat konverter dc-dc N-fasa.buck converter multi fasa juga banyak dipakai dalam indusri logam yang memerlukan arus dc yang sangat besar pada tegangan yang rendah.
Gambar 1. Topologi buck converter [5]
Buck converter pada keadaan ideal
dengan periode pensaklaran T dan duty cycle D dapat dilihat pada gambar 1. Persamaan keadaan buck
converter dalam bentuk Continuos Cunduction Mode (CCM) diperoleh
berdasarkan hukum kirchof. Ketika saklar ON, arus dinamik pada induktor IL(t) dan tegangan kapasitor
VC(t) dapat diperoleh dari persamaan
berikut [1][2][3]; 1 ( ) , 0 , : 1 ( ) L in o o o L di V v dt L t dT Q ON dv v i dt C R ...(1) dan ketika saklar OFF diperoleh persamaan berikut; 1 ( ) , , : 1 ( ) L o o o L di v dt L dT t T Q OFF dv v i dt C R …...(2) Sebagai dasar model buck converter terdiri dari dua fungsi alih, model pertama mempengaruhi duty cycle pada output, Gvd(s), dan model kedua mempengaruhi tegangan pada output, Gvg(s). Bentuk umum fungsi alih sebagai berikut[5];
2 0 0 0)
(
s
Q
s
s
G
s
G
d vd ...(3)
2 0 0 0)
(
s
Q
s
s
G
s
G
vg g ...(4) DenganD
G
g0
,D
D
G
d0
,LC
1
0
,L
C
R
Q
...(5)Kompensator Proposional Integral (PI)
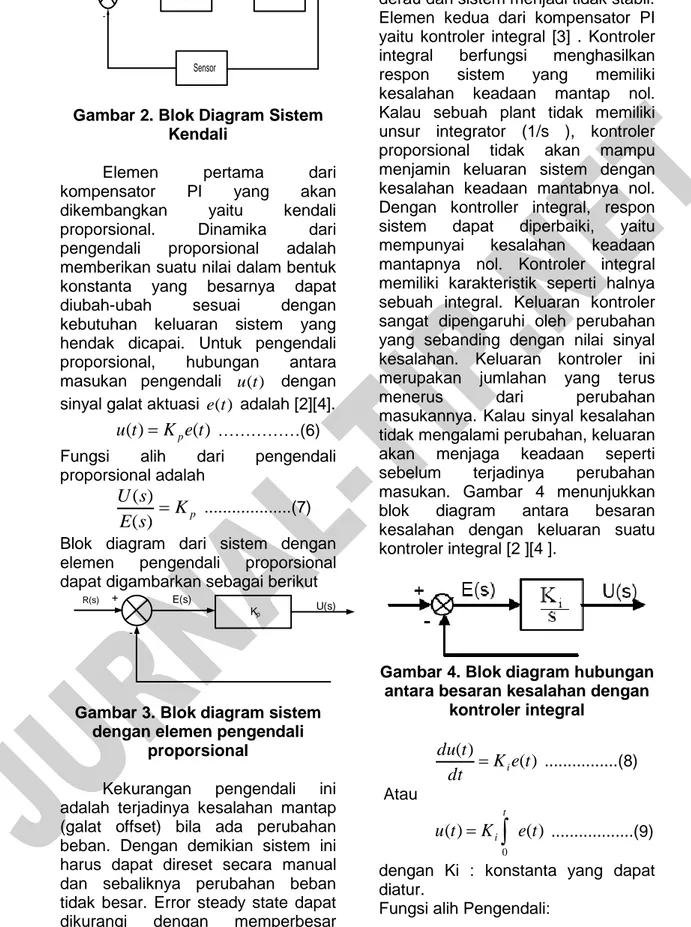
Kompensator PI (Proporsional Integral ) merupakan kontroler yang mengabungkan 2 buah jenis kontroler dengan karakteristiknya masing-masing. Gambar 2 memperlihatkan blok diagram sistem Kendali [2] .
Pengendali + -U(s) Masukan Sistem Kendalian
E(s) Keluaran Sistem
Sensor
Gambar 2. Blok Diagram Sistem Kendali
Elemen pertama dari kompensator PI yang akan dikembangkan yaitu kendali proporsional. Dinamika dari pengendali proporsional adalah memberikan suatu nilai dalam bentuk konstanta yang besarnya dapat diubah-ubah sesuai dengan kebutuhan keluaran sistem yang hendak dicapai. Untuk pengendali proporsional, hubungan antara masukan pengendali u(t) dengan sinyal galat aktuasi e(t) adalah [2][4].
)
(
)
(
t
K
e
t
u
p ………(6)Fungsi alih dari pengendali proporsional adalah p
K
s
E
s
U
)
(
)
(
...(7)Blok diagram dari sistem dengan elemen pengendali proporsional dapat digambarkan sebagai berikut
Kp + -E(s) U(s) R(s)
Gambar 3. Blok diagram sistem dengan elemen pengendali
proporsional
Kekurangan pengendali ini adalah terjadinya kesalahan mantap (galat offset) bila ada perubahan beban. Dengan demikian sistem ini harus dapat direset secara manual dan sebaliknya perubahan beban tidak besar. Error steady state dapat dikurangi dengan memperbesar penguatan, akan tetapi penguatan yang terlalu besar akan
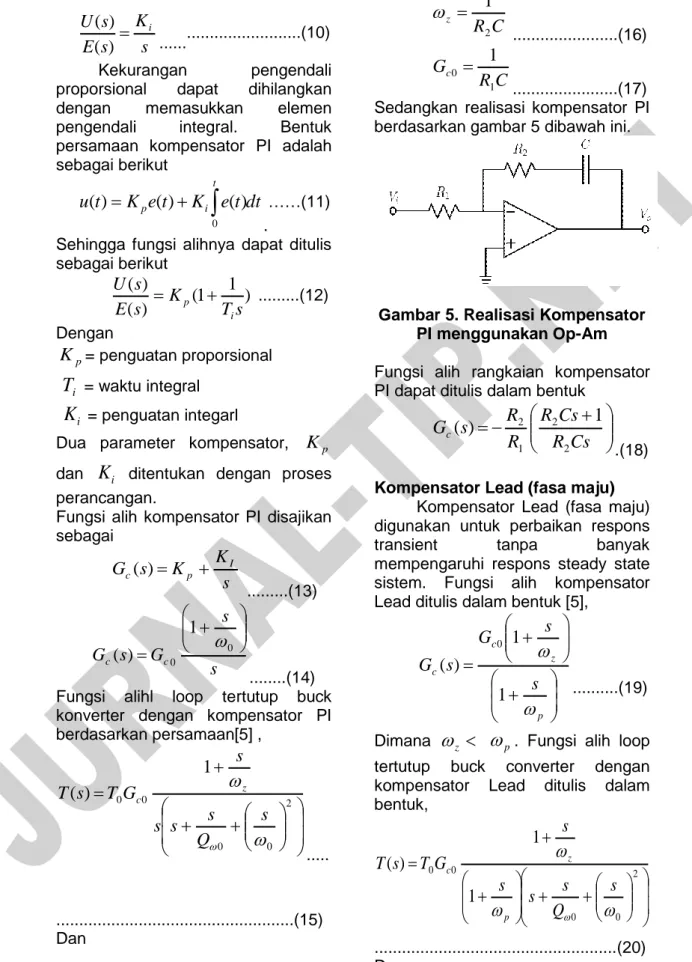
mengakibatkan semakin besarnya derau dan sistem menjadi tidak stabil. Elemen kedua dari kompensator PI yaitu kontroler integral [3] . Kontroler integral berfungsi menghasilkan respon sistem yang memiliki kesalahan keadaan mantap nol. Kalau sebuah plant tidak memiliki unsur integrator (1/s ), kontroler proporsional tidak akan mampu menjamin keluaran sistem dengan kesalahan keadaan mantabnya nol. Dengan kontroller integral, respon sistem dapat diperbaiki, yaitu mempunyai kesalahan keadaan mantapnya nol. Kontroler integral memiliki karakteristik seperti halnya sebuah integral. Keluaran kontroler sangat dipengaruhi oleh perubahan yang sebanding dengan nilai sinyal kesalahan. Keluaran kontroler ini merupakan jumlahan yang terus menerus dari perubahan masukannya. Kalau sinyal kesalahan tidak mengalami perubahan, keluaran akan menjaga keadaan seperti sebelum terjadinya perubahan masukan. Gambar 4 menunjukkan blok diagram antara besaran kesalahan dengan keluaran suatu kontroler integral [2 ][4 ].
Gambar 4. Blok diagram hubungan antara besaran kesalahan dengan
kontroler integral
)
(
)
(
t
e
K
dt
t
du
i
...(8) Atau)
(
)
(
0t
e
K
t
u
t i
...(9) dengan Ki : konstanta yang dapat diatur.s
K
s
E
s
U
i)
(
)
(
...(10) Kekurangan pengendali proporsional dapat dihilangkan dengan memasukkan elemen pengendali integral. Bentuk persamaan kompensator PI adalah sebagai berikutdt
t
e
K
t
e
K
t
u
t i p
0)
(
)
(
)
(
. ……(11) Sehingga fungsi alihnya dapat ditulis sebagai berikut)
1
1
(
)
(
)
(
s
T
K
s
E
s
U
i p
...(12) Dengan pK
= penguatan proporsional iT
= waktu integral iK
= penguatan integarlDua parameter kompensator,
K
pdan
K
i ditentukan dengan proses perancangan.Fungsi alih kompensator PI disajikan sebagai
s
K
K
s
G
c(
)
p
I ...(13)s
s
G
s
G
c c
0 01
)
(
...(14) Fungsi alihl loop tertutup buck konverter dengan kompensator PI berdasarkan persamaan[5] ,
2 0 0 0 01
)
(
s
Q
s
s
s
s
G
T
s
T
z c ... ...(15) DanC
R
z 21
...(16)C
R
G
c 1 01
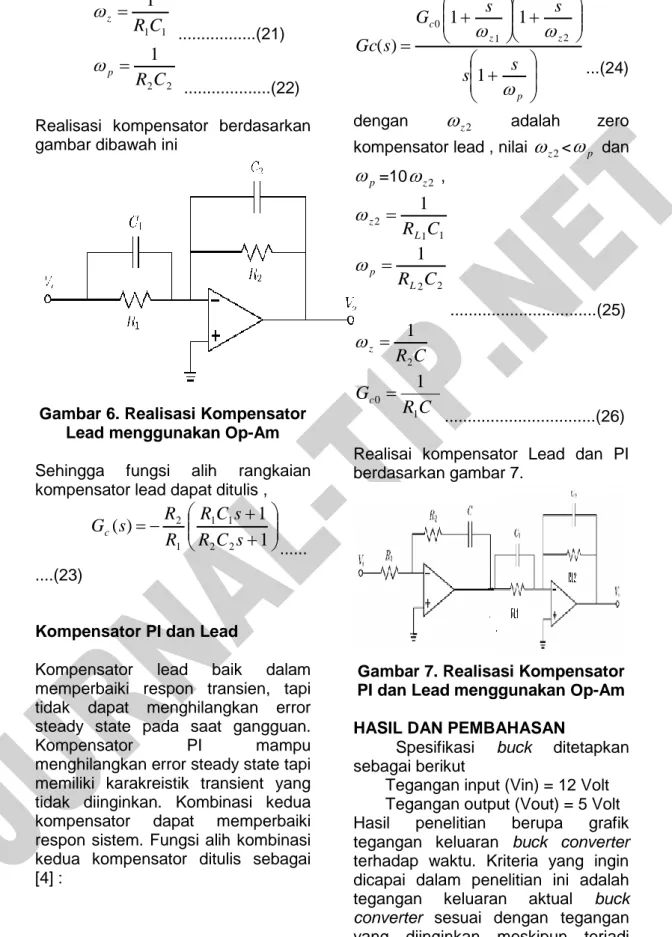
...(17) Sedangkan realisasi kompensator PI berdasarkan gambar 5 dibawah ini.Gambar 5. Realisasi Kompensator PI menggunakan Op-Am Fungsi alih rangkaian kompensator PI dapat ditulis dalam bentuk
Cs
R
Cs
R
R
R
s
G
c 2 2 1 21
)
(
.(18)Kompensator Lead (fasa maju) Kompensator Lead (fasa maju) digunakan untuk perbaikan respons transient tanpa banyak mempengaruhi respons steady state sistem. Fungsi alih kompensator Lead ditulis dalam bentuk [5],
p z c cs
s
G
s
G
1
1
)
(
0 ...(19)Dimana
z
p. Fungsi alih loop tertutup buck converter dengan kompensator Lead ditulis dalam bentuk,
2 0 0 0 01
1
)
(
s
Q
s
s
s
s
G
T
s
T
p z c ...(20) Dan1 1
1
C
R
z
...(21) 2 21
C
R
p
...(22)Realisasi kompensator berdasarkan gambar dibawah ini
Gambar 6. Realisasi Kompensator Lead menggunakan Op-Am Sehingga fungsi alih rangkaian kompensator lead dapat ditulis ,
1
1
)
(
2 2 1 1 1 2s
C
R
s
C
R
R
R
s
G
c ... ....(23)Kompensator PI dan Lead
Kompensator lead baik dalam memperbaiki respon transien, tapi tidak dapat menghilangkan error steady state pada saat gangguan. Kompensator PI mampu menghilangkan error steady state tapi memiliki karakreistik transient yang tidak diinginkan. Kombinasi kedua kompensator dapat memperbaiki respon sistem. Fungsi alih kombinasi kedua kompensator ditulis sebagai [4] :
p z z cs
s
s
s
G
s
Gc
1
1
1
)
(
1 2 0 ...(24)dengan
z2 adalah zero kompensator lead , nilai
z2<
p danp
=10
z2 , 1 1 21
C
R
L z
2 21
C
R
L p
...(25)C
R
z 21
C
R
G
c 1 01
...(26)Realisai kompensator Lead dan PI berdasarkan gambar 7.
Gambar 7. Realisasi Kompensator PI dan Lead menggunakan Op-Am HASIL DAN PEMBAHASAN
Spesifikasi buck ditetapkan sebagai berikut
Tegangan input (Vin) = 12 Volt Tegangan output (Vout) = 5 Volt Hasil penelitian berupa grafik tegangan keluaran buck converter terhadap waktu. Kriteria yang ingin dicapai dalam penelitian ini adalah tegangan keluaran aktual buck converter sesuai dengan tegangan
yang diinginkan meskipun terjadi perubahan beban. Untuk mengetahui
kinerja sistem dilakukan beberapa pengujian yang meliputi:
1. Pengujian plant buck
converter tanpa
menggunakan kompensator PI- Lead untuk beban 100 dan 1k
2. Pengujian plant buck converter dengan menggunakan kompensator PI-Lead untuk beban 100 dan 1k
Pengujian buck converter tanpa kompensator
Pengujian dilakukan dengan memberikan beban 100 dan 1k pada keluaran buck converter. Hasil pengujian dapat dilihat pada gambar 7 dan 8 dibawah ini.
Gambar 7. Keluaran buck converter untuk beban 1K
Gambar 8. Keluaran buck converter untuk beban 100
Gambar 7 memperlihatkan Keluaran buck converter untuk beban 1K telah sesuai dengan yang diinginkan sebesar 5 volt dengan
error steady state sebesar 0.015 volt
sampai 30,3 ms, dan waktu yang dibutuhkan untuk mencapai keadaan
steady state sebesar 14,1 ms.
Berdasarkan gambar 8 dapat dilihat bahwa perubahan beban
menyebabkan keluaran buck converter turun menjadi 4,93 Volt , keluaran ini tidak sesuai dengan tegangan yang diinginkan yaitu 5 Volt disamping meningkatnya error steady
state .
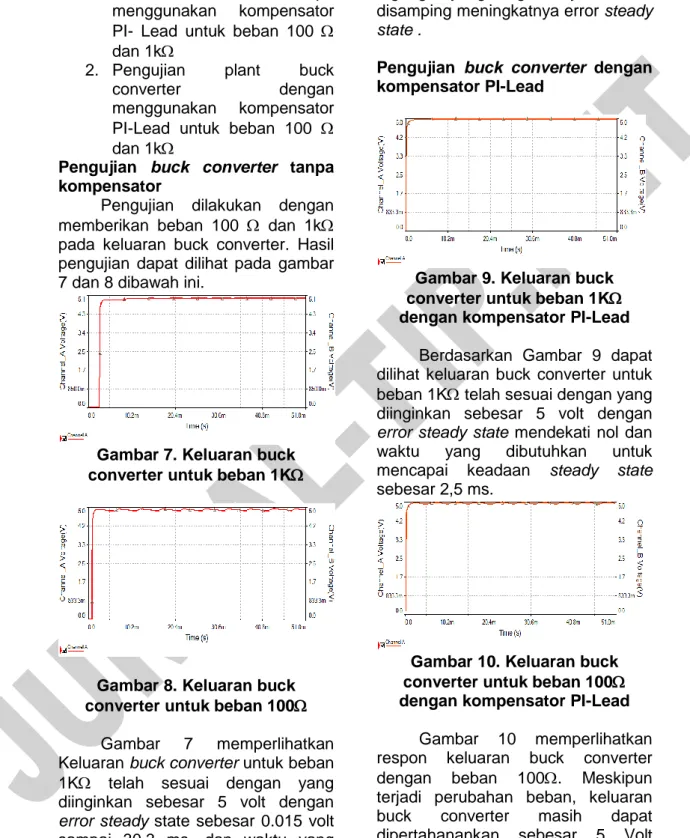
Pengujian buck converter dengan kompensator PI-Lead
Gambar 9. Keluaran buck converter untuk beban 1K dengan kompensator PI-Lead
Berdasarkan Gambar 9 dapat dilihat keluaran buck converter untuk beban 1K telah sesuai dengan yang diinginkan sebesar 5 volt dengan
error steady state mendekati nol dan
waktu yang dibutuhkan untuk mencapai keadaan steady state sebesar 2,5 ms.
Gambar 10. Keluaran buck converter untuk beban 100 dengan kompensator PI-Lead
Gambar 10 memperlihatkan respon keluaran buck converter dengan beban 100. Meskipun terjadi perubahan beban, keluaran buck converter masih dapat dipertahanankan sebesar 5 Volt dengan waktu mencapai keadaan steady state sebesar 2,4 ms dan
KESIMPULAN
Berdasarkan hasil penelitian yang diperoleh dapat disimpulkan sebagai berikut:
1. Perubahan beban menyebabkan keluaran buck converter tanpa kompensator PI-Lead tidak stabil dan tidak sesuai dengan yang diinginkan sebesar 5volt 2. Penggunaan komspensator
PI-Lead mampu menjaga kestabilan keluaran buck converter sebesar 5 Volt
DAFTAR PUSTAKA
[1] Bhupasandra Veeranna Sreenivasappa dan Yaragatti Udaykumar. 2010. Elimination of
Output Voltage Oscillations in DC-DC Converter Using PWM with PI Controller, Serbian Journal Of Electrical Engineering, Vol. 7, No. 1, May 2010, 57-68.
[2] Asnil. 2012. Perancangan Sistem Kendali Tegangan Keluararan buck convereter menggunakan Pengendali PI, Jurnal Teknologi Informasi & Pendidikan Vol.5, 1 Maret 2012,89-96
[3] Husnaini, Irma. 2012. Perancangan Kendali PID Digital Pada Keluaran Buck converter Berdasarkan Perubahan Beban, Jurnal Teknologi Informasi & Pendidikan Vol.5 1 Maret 2012,166-173
[4] Phillips, L. Charles and R.J Widodo. 1998. Sistem Kontrol:Dasar-dasar. 3rd Edition, Edisi Bahasa Indonesia , PT Prenhallindo, Jakarta.
![Gambar 1. Topologi buck converter [5]](https://thumb-ap.123doks.com/thumbv2/123dok/4553597.3309566/3.892.94.806.131.1015/gambar-topologi-buck-converter.webp)