LAPORAN AKHIR
PENELITIAN UNGGULAN ITS
(TERAPAN MULTIDISIPLIN) DANA ITS 2020
(Rancang Bangun Prototyping Platform & Bodyshell
Autonomous Vehicle ITS (AVITS - iCar)
Berbasis Integrated Digital Design untuk Kawasan Terbatas)
Tim Peneliti :
Ketua: Dr. Agus Windharto, DEA ( Creative Center ITS)
Anggota 1: Ir. Suwarmin, MT, PE (Teknik Mesin)
Anggota 2: Arie Kurniawan, ST, M.Ds (Desain Produk Industri)
DIREKTORAT RISET DAN PENGABDIAN KEPADA MASYARAKAT
INSTITUT TEKNOLOGI SEPULUH NOPEMBER
SURABAYA
Daftar Isi
Lembar Pengesahan ... i Daftar Isi ... ii Daftar Tabel ... iv Daftar Gambar ... iv Daftar Lampiran ... vi BAB I RINGKASAN ... 1BAB II HASIL PENELITIAN ... 3
2.1. Data yang diperoleh ... 3
a. Teori klasifikasi yang dihimpun oleh tim peneliti tentang Autonomous Car. ... 3
b. Data Eksisting Autonomous Car sebagai benchmarking ... 5
2.2. Konsep & Teknis Autonomous iCar ... 7
2.3. Analisis yang telah dilakukan ... 10
a. Analisis Antropometri Orang Indonesia ... 10
b. Ergonomi konsep ruang ... 11
c. Passanger Package ... 12
d. Ergonomi Ruang Dalam Intelligence Car ITS ... 13
BAB III LUARAN ... 14
Design #I (launched 17 Agustus 2020) ... 14
Add on(signage) (Launched 17 Agustus 2020) ... 22
Design #II (Launched 10 November 2020) ... 23
Manual Operation (Normal Mode Tanpa Autonomous) ... 26
Manual Operation (Normal Mode Autonomous) ... 26
BAB IV PERAN MITRA ... 28
BAB V KENDALA PELAKSANAAN PENELITIAN ... 29
BAB VI. IMPLEMENTASI RENCANA ... 30
BAB VII DAFTAR PUSTAKA ... 32
BAB VIII LAMPIRAN... 33
Lampiran 1 Tabel Daftar Luaran ... 33
lampiran 2 gambar dan dokumentasi progress ... 35
final design ... 35
Adjusment Final Carbody iCar yang dipamerkan pada Dies natalis ITS 2020 ... 39
Final Carbody ICar – basic shape ... 40
Engineering Package – Protoype ... 41
Daftar Lampiran
Lampiran 1 Tabel Daftar Luaran ... 33
lampiran 2 gambar dan dokumentasi progress ... 35
final design ... 35
Lampiran 3 dokumentasi Proses Design digital sampai dengan prototype dan launching ... 36
Adjusment Final Carbody iCar yang dipamerkan pada Dies natalis ITS 2020 ... 39
Final Carbody ICar – basic shape ... 40
Engineering Package – Protoype ... 41
BAB I RINGKASAN
Peran riset di lingkungan ITS pada perkembangan Teknologi Elektric Vehicle nasional untuk mencapai tahap maju yang signifikan sejalan dengan perkembangan teknologi 4.0 di Indonesia. ITS, telah sesuai mandat dari pemerintah melalui RISTEK BRIN untuk mewujudkan produk rujukan mobil otonomous nasional ini, dimulai dari aspek desain platform, sistem penggerak dan kestabilan kendaraan, sistem navigasi dan keselamatan, sistem komunikasi hingga sistem aplikasi pengguna dan pengendalian jarak – jauh, melalui produk Flag-Ship PRN (prioritas Riset Nasional).
Pelaksanaan riset ini sesuai dengan jadwal yang sudah diusulkan dan telah berjalan pada tahap laporan kemajuan AVITS, secara umum progressnya dapat kami telah selesai 100% (seratus persen). Sesuai dengan kontrak Nomor: 799/PKS/ITS/2020 riset ini akan menghasilkan data digital (3D geometry dan animasi design serta operasional) serta implementasi Inovasi Teknologi berupa protoype yang sudah diterapkan pada lingkungan ITS. Permasalahan integrasi desain dipecahkan dalam riset untuk desain dan prototype ini sebagai langkah penting untuk produk pertama otonomus car yang pernah dibuat di ITS. Tujuan riset yaitu pembuatan digital dan phisical protoype sebagai wujud kontribusi tim untuk peran ITS.
Target penelitian ini diharapkan akan dapat dikontribusikan hal- hal berikut:
Kontribusi model dan metode operasional dari dari sebuah sistem autonomous vehicle (AV) dengan memperhatikan proses bisnis, regulasi dan teknologi; khususnya untuk implementasi di Indonesia dengan ITS sebagai area Prototyping
Rancang Bangun Teknologi Desain Eksterior Bodyshell autonomous vehicle ITS (AVITS) yang sesusuai Human Factors Engineering, Ergonomics serta relevan dengan kondisi persona dan karakter masyarakat indonesia
Prorotipe Kendaraan Listrik Autonomous
Metodologi riset yang yang digunakan adalah Integrated Digital Design ( CAD, CAM dan CAE), yang memenuhi aspek RAMS (Reliability, Availability, Maintenance and Safety), Skema riset ini
Tujuan riset ini adalah mewujudkan riset inovatif produktif, menunjang rancang bangun prototyping Electric Bike/Tricycle/Car untuk menunjang industri dalam negeri, pada penelitian ini lebih fokus pada i-car ITS. Tersedianya moda transportasi pribadi dan komunitas pada kawasan terbatas (pariwisata dan permukiman) yang ramah lingkungan. Mengurangi polusi udara di kawasan perkotaan dan meningkatkan efisiensi dan produktivitas penduduk perkotaan.
Metodologi riset yang yang digunakan adalah Integrated Digital Design (CAD, CAM dan CAE), yang memenuhi aspek RAMS (Reliability, Availability, Maintenance and Safety), pada kegiatan Design Engineering Modeling, Testing, dan Certification kendaraan listrik berbasis baterai di lingkungan ITS. Rencana luaran penelitian ini antara lain penyusunan Roadmap Riset Kendaraan Listrik, Product Planning, Basic Design (General Arangement, Technical Specification, Design Requirements & Objectives (DR&O), Human Factors Engineering & Ergonomics, Conceptual Design, Preliminary Design, Scaled Model 1:5 – 1:8, Animation (Product Assy), Publication, Pemeran Nasional, HKI (Paten, Desain Industri), Testing (Structural Mechanical Testing).
Skema riset ini dirancang untuk 3 (tiga) tahun sesuai dengan prioritas dan tahapan kerjasama tim peneliti i-car ITS dan Industri Mitra PT. Juara Bike – Selis. Manfaat dari penelitian ini yaitu penguasaan State of the Art Technology rancang bangun Kendaran Listrik Perkotaan sesuai dengan kebutuhan masyarakat pengguna, karakter penumpang serta lingkungannya. Selain itu penelitian ini juga dapat meningkatkan daya saing industri dalam negeri, untuk mencegah semakin membanjirnya produk impor dan menciptakan kesempatan kerja dan nilai tambah ekonomi.
Dari berbagai aspek yang dikembangkan oleh Team Otonomous Vehicle ITS, selain Desain produk yang dihasilkan, satu aspek penting juga yaitu supporting system & man-machine interface (“user interface yang menjalankan fungsi aplikasi pengguna dan pengendalian jarak jauh”). Sebagai bagian ekosistem elektronik yang melibatkan teknologi informasi, akses nirkabel dan IoT, maka sistem dirancang untuk tidak melanggar peraturan (regulasi), serta memanfaatkan teknologi yang paling tepat untuk memperoleh hasil sistem yang optimal, efektif dan efisien. Capaian sampai dengan tahap akhir ini adalah telahterselesaikannya digital prototyping design AVITS (100% terselesaikan) sedangkan progress kegiatan pembuatan prototype fisik mencapai sekitar 100%.(seratus persen)
Ringkasan penelitian berisi latar belakang penelitian,tujuan dan tahapan metode penelitian, luaran yang ditargetkan, kata kunci
BAB II HASIL PENELITIAN
Hasil kemajuan pelaksanaan penelitian diuraikan dalam sub bab (2.1) Data yang diperoleh, (2.2) Analisis yang dihasilkan dan (2.3) Studi yang dihasilkan.
2.1. Data yang diperoleh
a. Teori klasifikasi yang dihimpun oleh tim peneliti tentang Autonomous Car.
Kendaraan otonom atau Autonomous Vehicle didefinisikan sebagai kendaran yang memiliki kemampuan ntuk berkendara layaknya dikendalikan seperti manusia. Kendaraan tersebut dilengkapi dengan teknologi kecerdasan buatan (Artificial intelligent) dan sensor sehingga mamungkinkan berjalan tanpa dikendalikan manusia. Konsep Kendaraan Otonom telah banyak dikembangkan oleh perodusen mobil terkenal seperti Tesla, Audi, BMW, Volvo dan lain lain. Kendaraan Autonomous adalah produk riset lintas disiplin antara teknologi otomotif dan teknologi informasi, dan teknologi utama yang disematkankan didalamnya adalah Artificial Intelligent (AI). Sebab kendaraan autonomous berbeda dengan kendaraan self driving. Kendaraan autonomous mampu melakukan analisa lingkungan sekitar melaui sensor dan mengambil mampu keputusan sendiri sehinga tidak memerlukan bantuan manusia dalam pengoperasiannya. Berikut adalah teknologi pada kendaaraan autonomous.
Tingkat Automation Kendaraan Autonomous memiliki level dari 0 – 5 yang dijelaskan melalui gambar berikut :
Gambar 3.2 Level automasi Kendaraan Autonomous (sumber: www.oodlesthecnologies.com)
Autonomous Tingkat (level) 0
Otomasi pada level ini adalah kendaraan masih dikendalikan oleh manusia sehingga tidak ada fitur Autonomous pada kendaraan di tingkat ini.
Autonomous Tingkat (level) 1
Pada tingkat ini fitur fitur otomasi mulai diterapkan untuk mendukung aspek keselamatan, keamanan dan kenyamanan pengemudi selama berkendara. Fitur auto braking atau pengereman otomatis adalah ciri khas level 1 automation dimana suatu kendaraan hanya mampu melakukan satu tugas dalam satu kesempatan
Autonomous Tingkat (level) 2
Pada tingkat ini kendaraan memiliki sistem otomatisasi parsial. Kendaraan minimal 2 fitur otomatis seperti Steering dan Lane Control Assistant termasuk Traffic Jam Assistant, membuat mengemudi sehari-hari jauh lebih mudah. Sistem pengereman secara otomatis, akselerasi otomatis dan, perlahan – lahan mengambil alih sistem kendali
Autonomous Tingkat (level) 3
Kendaraan otonomous level 3 mampu mengemudi sendiri, tetapi hanya dalam kondisi ideal dan dengan keterbatasan, seperti akses terbatas yang terbagi jalan raya dengan kecepatan tertentu. Meski tangan terlepas dari kemudi, pengemudi tetap diharuskan di belakang kemudi. Seorang pengemudi manusia masih harus mengambil alih jika kondisi jalan berada di bawah yang ideal.
Autonomous Tingkat (level) 4
Kendaraan otonom level 4 dapat mengemudi sendiri tanpa interaksi manusia (selain memasuki tujuan Anda) tetapi akan dibatasi untuk kasus penggunaan yang diketahui. Operasional kendaraan Autonomous level 4 ini masih dibatasi oleh hukum dan regulasi. Fitur autonomous Kendaraan level 4 masih dapat dioperasikan hanya pada lingkungan tertentu
Autonomous Tingkat (level) 5
Pada kendaraan Autonomous level 5 kita tiba di mobil tanpa pengemudi sejati. Kendaraan berkemampuan level 5 harus dapat memonitor dan bermanuver melalui semua kondisi jalan dan tidak memerlukan intervensi manusia apa pun, menghilangkan kebutuhan akan roda kemudi dan pedal. Meskipun banyak komponen teknologi artificial intelligent yang memungkinkan terwujudnya kendaraan ini, namun dikarenakan peraturan dan regulasi hukum, kendaraan Level 5 mungkin masih membutuhkan waktu beberapa tahun ke depan. b. Data Eksisting Autonomous Car sebagai benchmarking
Navya Car
Navya adalah produsen pelopor dan spesialis kendaraan otonom, yang berbasis di Prancis. NAVYA membantu memproduksi kendaraan Listrik Autonomous untuk transportasi kota, bandara, kampus dan instansi seperti rumah sakit dll.
OLLI
Olli adalah salah satu kendaraan listrik autonomous yang diproduksi oleh Local Motors (LM) yang berbasis di Phoenix, Arizona – America. Olli memposisikan diri sebagai kendaraan autonomous shuttle elektrik untuk kawasan smart city.
Gambar 3.4 Desain Autonomous Electric Shuttle Bus OLLI
Easy Mile EZ10
Kendaraan otonom EZ10 memungkinkan mobilitas cerdas di kawasan perkotaan, pinggiran kota atau di area pribadi. Dirancang untuk menjembatani kesenjangan antar moda dan memungkinkan mobilitas baru untuk kawasan publik dan pribadi, EZ10 merupakan kendaraan listrik Autonomus pertama kali diluncurkan pada bulan April 2015. Telah terbukti lebih 200 unit diluncurkan dan lebih dari 600.000 km diuji dalam mode otonom. EZ10 saat ini digunakan di jalan umum dan pribadi dan lebih dari 25 negara di 4 benua.
2.2. Konsep & Teknis Autonomous iCar
Konsep Inovasi berdasarkan lingkup riset (secara tim besar) :
1. Roadmap Riset Kendaraan Listrik Master & Detailed Schedule, MSCA: Market Survey & Competitor Analysis,
2. Product Planning: Technology Readiness, Multi Criteria & Socio Economic study 3. Basic Design: General Arangement, Technical Specification, Design Requirements &
Objectives (DR&O)
4. Human Factors Engineering & Ergonomics
5. Conceptual Design Exterior & Interior Design, Semantics & Semiotics Analysis, Electrical System design, Structure & Mechanical Design
6. Preliminary Design 3D Digital Prototypes, Engineering Analysis (Finite Elements Analysis/ FEA)
7. Prototipe – termasuk branding dan grafis Stipingnya 8. Animation: Product Assy.
9. Publication Jurnal Ilmiah Internasional bereputasi
10. Pemeran Nasional Ritech Expo – Hari Kebangkitan Teknologi Nasional 2020 11. HKI : Paten, Desain Industri,
12. Testing : Structural Mechanical Testing,
Kelompok Riset ini membatasi ruang lingkup pada Carbody
Pada proses perkembangan lebih lanjut, tim diminta oleh manajemen ITS untuk I-car ITS dengan konsep desain yang berbeda namun dengan menggunanakan platform yang sama. Selain desain eksterior dan interior i-car ITS juga akan dilaksanakan desain dan fabrikasi chasis yang akan dilaksanakan oleh tim mekanikal. Selanjutnya pengembangan desain i-car ITS
Kendaraan Elektrik Autonomous adalah jenis transportasi yang cocok apa bila diterapkan pada Lingkungan terbatas (dalam konteks ini area ITS), sehingga dapat di
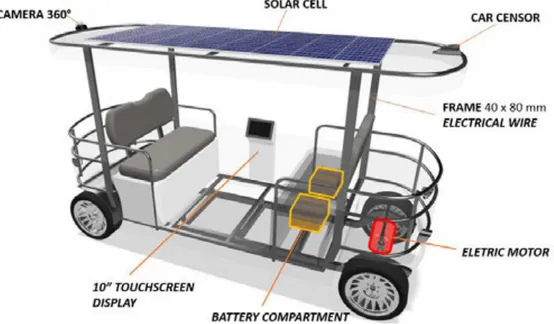
Gambar Anatomi kendaraan autonomous elektrik ITS
Keterangan
1. Body/ Frame
2. Frame, Power Drive & Steering 3. Servo Control & Mechatronics 4. Sensors & Navigations
5. Communication
6. Integration On-board Unit, and User Interface 7. Battery
Gambar 2.6. Anatomi kendaraan autonomous elektrik ITS Keterangan
1. Chasis Frame 2. Body Shell
3. Servo Control, Mechatronics & Steering 4. Sensors & Navigations
5. Integration On-board Unit, and User Interface 6. Battery
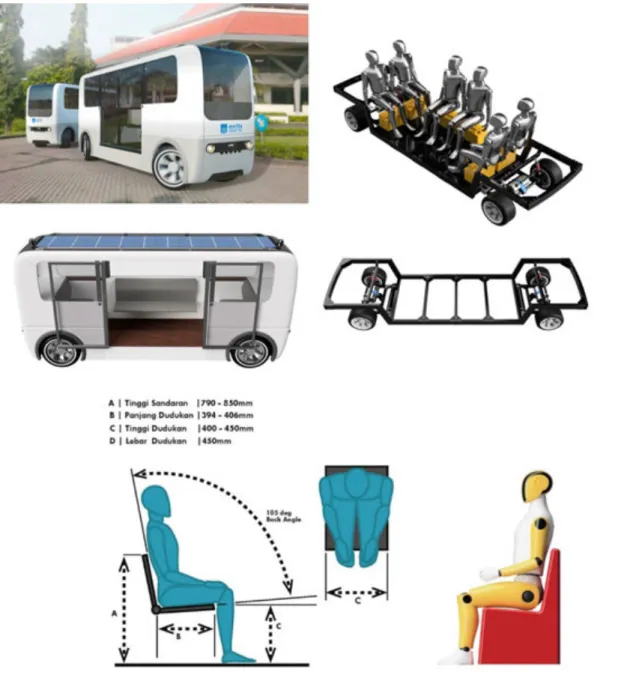
2.3. Analisis yang telah dilakukan a. Analisis Antropometri Orang Indonesia
Anthropometry menggunakan data ukuran oran Indonesia dengn 95% tile laki-laki dan 5% Perempuan untuk kebutuhan mplementasi kebutuhan pada ruang penumpang iCar
Kendaraan ini harus mempertimbangkan aspek ergonomi penumpang terutama orang Indonesia sebagai mayoritas user, sehingga perlu adanya analisa antropometeri orang Indonesia. Antropometri adalah sebuah studi tentang pengukuran tubuh dimensi manusia dari tulang, otot dan jaringan adiposa atau lemak (Survey, 2009). Menurut (Wignjosoebroto, 2008), antropometri adalah studi yang berkaitan dengan pengukuran dimensi tubuh manusia. Bidang antropometri meliputi berbagai ukuran tubuh manusia seperti berat badan, posisi ketika berdiri, ketika merentangkan tangan, lingkar tubuh, panjang tungkai, dan sebagainya.
Data antropometri digunakan untuk berbagai keperluan, seperti perancangan stasiun kerja, fasilitas kerja, dan desain produk agar diperoleh ukuran-ukuran yang sesuai dan layak dengan dimensi anggota tubuh manusia yang akan menggunakannnya. Berikut acuan pengukuran antropometri berdasarkan database ukuran tubuh orang indonesia.:
Antropometri orang Indonesia
b. Ergonomi konsep ruang
Langkah berikutnya implementasi analisis Antropometri menggunakan data ukuran orangIndonesia dengn 95% tile laki-laki dan 5% Perempuan dengan implementasi pada ruang iCar, mengacu pada pustaka: Panero, Julius dan Zelnik, Martin. (1979). Human Dimension dan . Tilley, Alvin dan Dreyfuss, Henry. (2002). Associates ; with an introduction by Stephen B. Wilcox. The Measure of Man and Woman : Human Factors in Design
c. Passanger Package
d. Ergonomi Ruang Dalam Intelligence Car ITS
Langkah berikutnya implementasi analisis Antropometri menggunakan data ukuran orang Indonesia 95% tile laki-laki dan 5% Perempuan dengan implementasi pada ruang iCar, mengacu pada pustaka: Panero, Julius dan Zelnik, Martin. (1979). Human Dimension dan . Tilley, Alvin dan Dreyfuss, Henry. (2002). Associates ; with an introduction by Stephen B. Wilcox. The
BAB III LUARAN
Uraian status proses mencapai luaran yang didukung dengan bukti kemajuan ketercapaian luaran yang data lengkapnya disampaikan pada bagian bab Lampiran.
Diskripsi status dapat digambarkan:
Design #I (launched 17 Agustus 2020)
a. Dokumen Design Engineering Moda Transportasi Autonomous untuk Kawasan Terbatas
Gambar 3.1. Spesifikasi Platform Chasis Mobil Golf 4 Seater yang digunakan pada tahap awal
b. Digital Prototipe
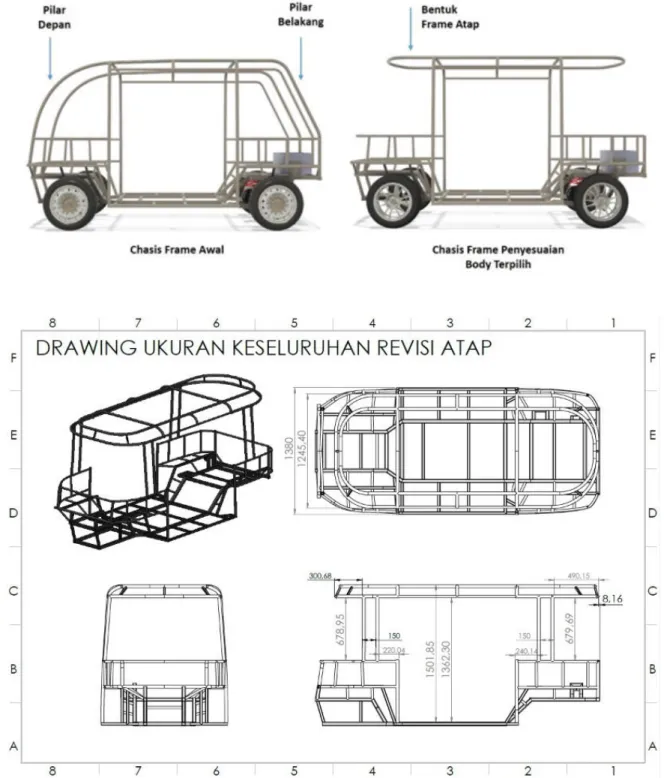
Gambar 3.6. Preliminary desain bentuk body tahap awal
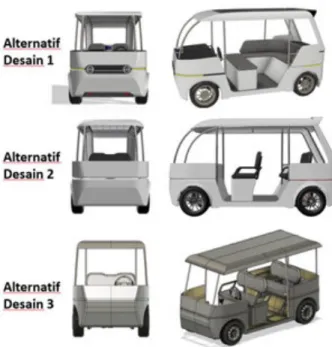
Gambar 3.8. Pengajuan alternatif desain body shell pada tahap pengembangan prototype
Gambar 3.9. Konsep bukaan bagasi untuk perawatan battery dan motor pada bagian belakang body
Gambar 3.11. Pengajuan alternatif desain body shell pada tahap pengembangan
c. Body Shell Prototype (terintegrasi dengan riset tim lain)
Pada prototyping tahap pertama proses produksi dilakukan di workshop mitra produksi PT. Nobel Technotronics, Jl. Panjang Jiwo No.60, Surabaya. Proses prototyping tahap pertama ini meliputi : penyesuaian proporsi dimensi velg & ban mobil, rekayasa & pembuatan frame body, pembuatan bentuk body shell berbahan aluminium sheet sampai finishing dasar.
Gambar 3.14. Diskusi teknis dan survey progress prototyping tahap pertama
Gambar 3.15. Dokumentasi progress prototyping tahap pertama
Add on(signage) (Launched 17 Agustus 2020)
Design #II (Launched 10 November 2020)
Desain final merupakan prototype akhir yang dijadikan milestone riset untuk icar tahun 2020. Konsep Uniq, simple, Clean Hitech dan inovatif menjadi kata kunci
`
Tim Manajemen telah mengkerucutkan pilihan menjadi 2(dua) yaitu: VS
Manual Operation (Normal Mode Tanpa Autonomous) A. Menyalakan Kendaraan Dari Mode TOW
1. Putar switch ke mode RUN yang berada di belakang kendaraan
2. Putar kunci kontak yang bereada di kanan steering column ke kanan untuk menyalakan kendaraan
3. Putar emergency button yang berada di kiri steering column sampai tombol poping up 4. Pilih mode FORWARD pada switch di kanan kunci kontak
5. Tekan Accelerator pedal secara perlahan, kendaraan akan bergerak kedepan
6. Untuk menggerakkan kendaraan kebelakang, pilih mode REVERSE pada switch di kanan kontak
B. Menyalakan Kendaraan Dari Mode RUN
1. Putar kunci kontak yang kanan steering column ke kanan untuk menyalakan kendaraan 2. Putar emergency button sampai tombol poping up
3. Pilih mode FORWARD pada switch di kanan kunci kontak
4. Tekan Accelerator pedal secara perlahan, kendaraan akan bergerak kedepan
5. Untuk menggerakkan kendaraan kebelakang, pilih mode REVERSE pada switch di kanan kontak
C. Mematikan Kendaraan
1. Pastikan kendaraan tidak bergerak dengan menginjak rem
2. Tekan emergency button yang berada di kiri steering column sampai terdengar suara kllik 3. Putar kunci kontak ke kiri untuk mematikan kendaraan
4. Jika kendaraan akan di simpan dalam jangka waktu panjang atau kendaraan akan di derek, maka pada ganti Mode kendaraan ke TOW dengan memutar switch yang berada di belakang kendaraan ke TOW
Perhatian
Penggantian mode dari TOW ke RUN harus menunggu 15 detik setelah kendaraan di ganti dari mode RUN ke TOW. Kegagalan untuk mengikuti instruksi ini dapat mengakibatkan kerusakan pada komponen kendaraan
Manual Operation (Normal Mode Autonomous)
Mode Autonomous melewatkan Proses A-B-C secara online, operator hanya memastikan ON OF position Switch, notifikasi untuk tindakan lebih lanjut disampaikan ke Online warning system.
Capaian Luaran riset ini sebagai berikut:
No Kegiatan Progess Status
1 Dokumen Design Engineering Moda Transportasi Autonomous untuk Kawasan Terbatas 100%
2 Digital Prototipe 100%
3 Body Shell Prototype (terintegrasi dengan riset tim lain) 100%
4 Animasi Operasional 100%
5 HKI (Desain Industri dan Merek) 100%
6 Publikasi pada jurnal ilmiah bereputasi nasional 100%
BAB IV PERAN MITRA
Penelitian ini , bukan Kerjasama Antar Perguruan Tinggi, namun pada progressnya melibatkan beeberapa pihak diluar tim Peneliti,
Kontribusi pihak lain ini dapat dideskripsikam sebagai berikut:
Workshop Nobel Technotronics, Jl. Panjang Jiwo No.60, Surabaya. Pekerjaan meliputi : penyesuaian proporsi dimensi velg & ban mobil, rekayasa & pembuatan frame body, pembuatan bentuk body shell berbahan aluminium sheet sampai finishing dasar. Pembuatan supporting sistem berupa papan totem signage yang digunakan untuk drop point shelter. Top Seven Garage, Jl. Keputih Tegal Timur No.67 B, Surabaya. Pekerjaan meliputi :
pembuatan chasis space frame, serta pembuatan komponen full assembly body shell sesuai dengan desain yang telah disepakati pada proses pengembangan intelligence car ITS. Tim Mekatronika (Pak Rudy Dikairono & Pak Muhtadin), meliputi pekerjaan : sistem
kemudi, kontrol dan navigasi intelligence car ITS.
Implementasi Analisa dilakukan bersama mitra yaitu divisi R&D workshop Nobel dengan tetap memperhatikan prinsip kerahasiaan teknologi dan inovasi dari ITS.
Penguasaan Teknologi Rancang Bangun Prototyping Industri Kendaraan Listrik sangat penting bagi perkembangan Industri manufaktur kendaraan listrik Nasional khususnya lingkungan riset ITS. Hal tersebut bertujuan untuk meningkatkan daya saing produk terhadap produk- produk asing yang masuk ke pasar domestik. Persaingan produk kendaraan listrik dengan produk asing tidak dapat dipungkiri. Oleh sebab itu perlu adanya kolaborasi antara Industri Manufaktur Kendaraan Listrik dengan Perguruan Tinggi untuk melakukan riset dan pengembangan produk. Sehingga produk yang dihasilkan berdaya saing tinggi dan memenuhi kriteria aspek RAMS (Reliability, Availability, Maintenance and Safety),
BAB V KENDALA PELAKSANAAN PENELITIAN
Kesulitan yang utama dihadapi tim riset adalah terbatasnya waktu dan harus memenuhi milestone tanggal kegiatan misalnya 17 Agustus (hari Kemerdekaan) dan 10 Nopember (dies Natalis ITS). Kegiatan yang mengalami penyesuai jadwal adalah (dimulai dari tahap ke 3 ):3. Conceptual Design, Requirements & Objectives a Exterior Design 3D digital Solid model b Human Factors & Ergonomics
c Exterior configuration 4 Preliminary Design (3 Alternatives)
a 3D Solid Model – Assy. Design b Animasi Desain & Operasional c Carbody envelope prototyping d Engineering Analysis (FEA)
5 Draft HKI (Paten, Desain Industri & Merek) 6 dan penysunan Laporan Akhir
Sinergitas dan integrase kerjasama dengan disiplin ilmu lain juga memerlukan waktu yang lebih panjang dari perkiraan
Hambatan atau kendala yang mungkin terjadi pada tahap ini terjadi dalam prosesnya,
diidentifikasi sebagai kendala yang dihadapi adalah evaluasi konsep baru, jika di fase fuxxy front end, tim melakukan kesalahan dalam memilih ide pengembangan produk.
Dengan adanya kesalahan dalam pemilihan eksekusi desain yang ternyata ide tidak sesuai dengan yang ada pada pasar maka tim mengalami kerugian waktu yang besar.
Masalah ini cukup mengganggu sehingga dalam tahap ini harus benar-benar teliti, dan dalam tahap penyaringan ini dibutuhkan sebuah keputusan yang matang agar tidak salah memilih solusi yang di dapatkan.
BAB VI. IMPLEMENTASI RENCANA
Implementasi Rencana Tahapan berisi tentang penyelesaian penelitian berdasar rencana untuk mencapai luaran yang dijanjikan.
Kegiatan Selanjutnya adalah menyelesaikan kegiatan: Finalisasi Exterior, Interior & Cabin Envelope
Penyususnan dokumen Conceptual Design, Requirements & Objectives Finalisasi Exterior Design 3D digital Solid model
Human Factors & Ergonomics Exterior configuration
Preliminary Design (3 Alternatives) 3D Solid Model – Assy. Design Animasi Desain & Operasional Carbody envelope prototyping Engineering Analysis (FEA)
Draft HKI (Paten, Desain Industri & Merek) Laporan Akhir
Rencana ditabelkan dalam jadwal sebagai berikut (daerah lebih gelao = sudah selesai)
No Kegiatan
Bulan Ke -
1 2 3 4 5 6 7 8 Proposal & Perjanjian Kerjasama
1 Product Planning
a Market Survey & Analysis b Product STP
c Competitor & Needs Analysis d Technology Readiness
No Kegiatan
Bulan Ke -
1 2 3 4 5 6 7 8
2 Basic Design: Conceptual & Preliminary Design Exterior - Interior
a General Arrangement & DR&O b Technical Specification
c Human Factors Engineering & Ergonomy d Engineering Development
e 3D Digital Solid Model Exterior & Interior (2 alternatives)
f Exterior, Interior & Cabin Envelope
3. Conceptual Design, Requirements & Objectives
a Exterior Design 3D digital Solid model b Human Factors & Ergonomics
c Exterior configuration
4 Preliminary Design (3 Alternatives)
a 3D Solid Model – Assy. Design b Animasi Desain & Operasional c Carbody envelope prototyping d Engineering Analysis (FEA)
BAB VII DAFTAR PUSTAKA
Braun, A. 2013. BMW i Visionari Mobility. Jerman: HermerPerini, Giancarlo. 2007. Car Styling BMW Group Design Special Edition. Jerman: BMW Group Design
Wardle, Geof., dan Macey, Stuart. 2014. H Point: The Fundamental of Car Design &
Packaging . California: Design Studio Press
Panero, Julius dan Zelnik, Martin. (1979). Human Dimension. Jakarta: Erlangga R. Tilley, Alvin dan Dreyfuss, Henry. (2002). Associates ; with an introduction by
Stephen B. Wilcox. The Measure of Man and Woman : Human Factors in Design.
New York :Wiley, 2002.
Brin, Ristek. 2019. Siaran Pers Electric Vehicle Indonesia Forum & Exhibition [Online].
Tersedia: https://www.ristekbrin.go.id, diakses tanggal 5 Maret 2020
BMW. 2019. The Path To Autonomous Driving [online]. Tersedia: www.bmw.com diakses tanggal diakses tanggal 5 Maret 2020
https://localmotors.com/meet-olli/ , diakses tanggal 5 Maret 2020
https://easymile.com/solutions-easymile/ez10-autonomous-shuttle-easymile/, diakses tanggal 5 Maret 2020
https://navya.tech/en/, diakses tanggal 5 Maret 2020
Mott, R.L., 2009, “Elemen-elemen Mesin dalam Perancangan Elemen Mesin Terpadu”, Penerbit Andi, Buku 1 dan 2 46
Ashby, M., Johnson, K., 2007, “Materials and Design, The Art and Science of Material
Selection in Product Design”, Butterworth Heinemann, Oxford, UK
Cross, N., 1998, “Engineering Design Methods, Strategies for Product Design” Second
BAB VIII LAMPIRAN
Lampiran 1 Tabel Daftar Luaran
Program Penelitian Unggulan ITS 2020
Nama Ketua Tim : Dr Agus WIndharto
Judul : Rancang Bangun Prototyping Platform & Bodyshell Autonomous Vehicle ITS (AVITS - iCar) Berbasis Integrated Digital Design untuk Kawasan Terbatas
1.Artikel Jurnal
No Judul Artikel Nama Jurnal Status Kemajuan*)
ICar Design – Digital Prototyping Belum ada Masa Penyusunan
Belum ada Belum ada Belum ada
2. Artikel Konferensi
No Judul Artikel Nama acara, Tempat, Tanggal Status
Belum ada Belum ada Belum ada
Belum ada Belum ada Belum ada
3. Paten
No Judul Usulan Paten Status Kemajuan
Belum ada Belum ada
Belum ada Belum ada
5. Hasil Lain
No Nama Output Detail Output Status Kemajuan*)
Branding System On porgress 80%
Animasi On porgress
Prototyping
*) Status kemajuan: cantumkan status kemajuan sesuai kondisi saat ini
6. Disertasi/Tesis/Tugas Akhir/PKM yang dihasilkan
No Nama Mahasiswa NRP Judul Status*)
Andri Setiawan 09211850084002 Supply chain produk Inovasi
On porgress
Mahasiswa S1 - - On progress
pemilihan judul *) Status kemajuan: cantumkan lulus dan tahun kelulusan atau in progress
lampiran 2 gambar dan dokumentasi progress final design
Lampiran 3 dokumentasi Proses Design digital sampai dengan prototype dan launching
Dokumentasi pengerjaan 3d geometri body shell
soft launching iCar dihadiri oleh Rektor ITS dan Walikota Surabaya 17-08-2020
Adjusment Final Carbody iCar yang dipamerkan pada Dies natalis ITS 2020
Final Carbody ICar – basic shape
Testing Operational