Maximum Output Power Tracking Pada
Pembangkit Listrik Tenaga Angin Stand Alone
Berbasis Neural Network
Counterpropagation-Fuzzy Logic Controller
Muldi Yuhendri1), Mochammad Ashari2)
1) Jurusan teknik elektro Univ. Negeri Padang/Mahasiswa S2 jurusan teknik elektro ITS Surabaya 60111, Indonesia
2) Jurusan teknik elektro ITS Surabaya, 60111, Indonesia [email protected]
Mauridhi Hery Purnomo3)
3) Jurusan teknik elektro ITS Surabaya, 60111, Indonesia [email protected]
Abstract— This is paper proposes a variable speed control scheme of stand alone wind power generation system to produce the maximum output power, which is based on a Neural Network Counterpropagation (NNCP) and Fuzzy Logic Controller (FLC). The generation system using the squirrel-cage induction generator, which is operated in direct field oriented control mode. A NNCP is used for tracks the reference of generator speed in variation of the wind velocity to extract the maximum power. A FLC is used for control a speed by controlling the generator torque and programs the generator flux for improvement efficiency at light load. This scheme using voltage source inverter type space vector pulse width modulation. The experimental result are shown to verify the validity of the proposed scheme.
Keywords— wind generation system, MOPT, NNCP, FLC, DFOC.
I. PENDAHULUAN
Tenaga angin adalah salah satu sumber energi terbarukan yang banyak dikembangkan akhir-akhir ini. Indonesia adalah salah satu negara yang memiliki potensi angin yang cukup memadai dengan kapasitas mencapai 9,29 GW. Sampai tahun 2004, pemanfaatan energi angin di Indonesia baru mencapai 0,5 MW. Telah banyak riset yang dilakukan untuk meningkatkan performansi pembangkit listrik tenaga angin, yang mencakup pengembangan sistem secara mekanik, mekanik elektronik dan full elektronik [11].
Pengembangan secara mekanis dilakukan pada desain turbin angin. Turbin angin konvensional didesain dengan kecepatan konstan untuk kecepatan angin yang bervariasi [11]. Turbin jenis ini memiliki kekurangan dalam menangkap daya angin yang tersedia, sehingga daya output generator tidak maksimum. Dewasa ini turbin angin dikembangkan dengan model kecepatan bervariasi. Turbin jenis ini dapat memperbesar tangkapan daya angin, sehingga daya output generator bisa lebih maksimal dan efisiensi pembangkit menjadi meningkat [1].
Daya output generator tergantung pada daya mekanik turbin angin yang ditentukan oleh koefisien daya dan Tip
Speed Ratio (TSR) turbin. Daya output generator akan
maksimum pada titik koefisien daya maksimum dan TSR optimum. Salah satu cara untuk mendapatkan koefisien daya maksimum dan TSR optimum adalah dengan mengendalikan kecepatan putaran generator [3].
Pengembangan yang banyak dilakukan untuk mendapatkan daya output maksimum pada pembangkit listrik tenaga angin adalah pengembangan secara elektronis dengan mengaplikasikan berbagai macam model konverter yang dikontrol dengan beragam metode. Semua model yang diterapkan memiliki kelebihan dan kekurangan, sesuai dengan tujuan riset yang dilakukan. Dalam penelitian ini dirancang suatu model konverter untuk mendapatkan daya output generator yang maksimum pada setiap variasi kecepatan angin. Daya maksimum didapatkan dengan cara mengendalikan kecepatan turbin pada titik koefisien daya maksimum dan mengurangi rugi daya pada kondisi tunak. Konfigurasi pembangkit dibuat dalam bentuk stand alone yang menggunakan generator induksi tiga fasa rotor sangkar. Generator dioperasikan dalam mode Direct Field
Oriented Control (DFOC) dengan kontroller Neural
Network Counterpropagation (NNCP) dan Fuzzy Logic
Controller (FLC). NNCP digunakan untuk mencari
kecepatan referensi untuk daya maksimum pada setiap variasi kecepatan angin, sedangkan FLC diaplikasikan untuk mengendalikan kecepatan dan mengatur arus medan
generator. Pembangkit menggunakan Voltage Source
Inverter (VSI) yang dimodulasi dengan Space Vector Pulse Width Modulation (SVPWM).
II. SISTEM KONVERSI ENERGI ANGIN
A. Turbin Angin
bumi [12]. Gerakan udara adalah energi kinetik angin yang dapat dimanfaatkan untuk berbagai keperluan, seperti penggerak generator pembangkit listrik melalui sistem konversi dengan turbin angin.
Pada turbin angin, jumlah daya angin yang ditangkap turbin tergantung kepada ukuran baling-baling turbin dan kecepatan angin [1]. Daya mekanik yang dihasilkan turbin dirumuskan dengan persamaan [1,2,3,12]:
2 3
1
2
mP
KSU
R v
(1)Nilai efisiensi ini ditentukan oleh koefisien daya dan Tip Speed Ratio (TSR) [1]. Koefisien daya adalah rasio daya mekanik pada turbin dengan daya angin yang ditangkap baling-baling turbin. TSR merupakan rasio kecepatan baling-baling turbin dengan kecepatan angin [1]. Hubungan antara daya mekanik dengan koefisien daya dan TSR dijabarkan dalam persamaan :
2 3
Pada turbin angin yang menggunakan gearbox, daya dan torka mekanik pada poros generator adalah [3]:
shaft
B. Titik Daya Maksimum
0 0.2 0.4 0.6 0.8 1 1.2 1.4
Kecepatan mekanik (pu)
D
Gambar 1. Karakteristik daya mekanik turbin angin
Pada pembangkit listrik tenaga angin, daya maksimum dapat diperoleh dengan mengatur kecepatan putaran turbin pada titik daya mekanik maksimum dan mengurangi rugi-rugi daya [1-4].
Daya mekanik turbin angin akan maksimum saat nilai koefisien daya maksimum dan nilai TSR optimum. Gambar 1 menunjukkan karakteristik daya mekanik turbin angin. Dari Gambar 1 dapat kita lihat bahwa pada setiap variasi kecepatan angin terdapat satu titik daya mekanik maksimum. Titik daya maksimum berada pada kecepatan turbin yang bervariasi.
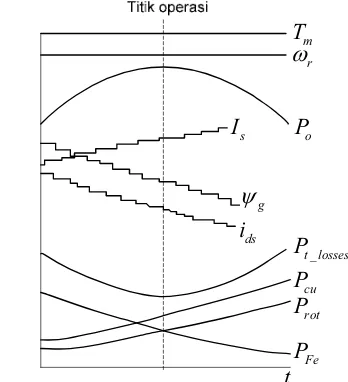
Cara kedua untuk meningkatkan daya output generator adalah menaikan efifiensi dengan cara mengurangi rugi-rugi daya melalui penurunan arus medan pada kondisi tunak [2-4]. Penurunan arus medan dilakukan hanya pada kondisi beban ringan [2,3]. Penurunan arus medan bertujuan untuk mengurangi rugi inti besi yang terdiri dari rugi hysteris dan rugi arus edy pada stator. Konsep peningkatan efisiensi ini ditunjukan pada Gambar 2.
t
Gambar 2. Pengaturan rugi daya untuk peningkatan efisiensi generator
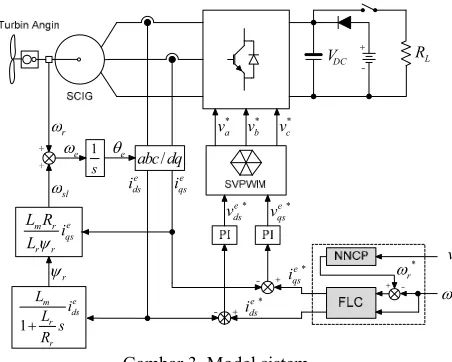
III. MODEL SISTEM
DC
Gambar 3. Model sistem
A. Direct Field Oriented Control
Field oriented control (FOC) adalah suatu metode
pengaturan medan pada mesin ac dalam bentuk vektor kontrol dengan mengubah sistem couple menjadi sistem
decouple, sehingga arus medan dan arus jangkar mesin
dapat dikontrol secara terpisah [15]. Arus medan merupakan komponen fluksi dan arus jangkar adalah komponen torka, sehingga dengan metode decouple torsi dan fluksi juga dapat diatur secara terpisah, seperti mesin dc [15].
Dalam penelitian ini digunakan mesin induksi sebagai generator. Dalam FOC, mesin induksi dimodelkan dalam sumbu dq. Secara umum persamaan mesin induksi dalam sumbu dq sebagai berikut [13-15] :
0 0
Daya input pada sator mesin induksi saat motoring atau daya output saat generating dinyatakan dalam bentuk persamaan :
Persamaan mekanik mesin induksi sebagai berikut :
m
FOC dapat dibuat dalam dua model, yaitu indirect (feedforward) dan direct (feedback) [15]. Dalam model
direct, sudut rotor diestimasi dari hasil pengukuran,
sedangkan pada model indirect sudut rotor diestimasi dari referensi. Model yang diusulkan menggunakan metode Direct Field Oriented Control (DFOC). Output kontroller DFOC berupa arus stator referensi
i
ds* dani
qs* .Sudut rotor
T
e diperoleh dari estimasi fluksi rotor melalui estimator arus stator mesin sumbu dq. Arus stator sumbu dq diperoleh dengan menggunakan persamaan :0
i
dani
dss merupakan besaran dua fasa arus stator dalam bentuk stasioner. Dalam bentuk rotating reference frame (i
qs dani
ds) digunakan persamaan [15] :Fluksi rotor
\
r dihitung dengan persamaan [15] :.
Setelah fluksi rotor diperoleh, kita dapat menghitung kecepatan slip
Z
s1 dengan persamaan :Sudut rotor dirumuskan sebagai berikut :
1
(
)
e m s
dt
T
³
Z
Z
(12)Dalam DFOC, arus stator referensi sumbu dq dihitung dengan persamaan :
B. Neural Network Counterpropagation (NNCP)
NNCP merupakan kombinasi struktur NN kompetitif dan
struktur outstar yang merupakan varian dari
backpropagation [20]. Pelatihan NNCP adalah gabungan
pelatihan terbimbing dengan pelatihan kompetitif. NNCP mampu melatih fungsi tak-linier melalui hidden layernya yang terdiri dari unit-unit kompetitif. Proses pelatihan NNCP untuk n unit masukan dan m unit keluaran sebagai berikut [20]:
x Pilih acak pasangan data input (x) dan output (y). x Normalisasi vektor masukan x dengan persamaan :
2
x Inisialisasi dan normalisasi neuron masukan serta hitung aktivasi setiap unit pada hidden layer linier. x Tentukan unit W dengan aktivasi yang paling besar
sebagai pemenang pada layer kompetitif.
x Penimbang antara W dan semua unit n pada lapis masukan diatur dengan persamaan :
1
H H H
Wn Wn n Wn
w
t
w
t
D
x
w
t
(16)x Ulangi langkah 1 sampai 5 sehingga semua pola pelatihan terproses pada iterasi pertama. Nilai
D
dimulai dari 0.1 dan terus berkurang untuk setiap iterasi.x Ulangi langkah 6 sehingga setiap pola masukan terlatihkan dengan unit kompetitif yang sama. x Pilih pasangan vektor pertama pada data pelatihan. x Ulangi langkah 2 sampai 4 untuk data yang sedang
dilatihkan.
x Atur penimbang antara unit pemenang pada hidden layer dengan semua unit keluaran m menggunakan persamaan :
1
o o o
mW mW n mW
w
t
w
t
E
y
w
t
(17)x Ulangi langkah 9 dan 10 untuk setiap vector data pelatihan,
E
dimulai dari 0.1 dan terus berkurang untuk setiap iterasi.x Ulangi langkah 8 sampai 11 sehingga error antara output dengan target dibawah batas ambangnya. Dalam penelitian ini NNCP digunakan untuk mencari kecepatan referensi generator. Input NNCP adalah kecepatan angin dan outputnya kecepatan referensi generator untuk daya maksimum. Data training diambil dari hasil simulasi dengan PI kontroller.
y Process Input
x p
Gambar 4. Struktur NNCP dalam simulink MATLAB
Gambar 4 menunjukkan struktur NNCP yang dihasilkan dari simulasi dengan MATLAB. NNCP memiliki tiga layer, yaitu layer input, kompetitif dan output.
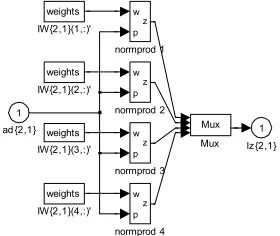
iz {1,1}
Gambar5. Struktur neuron NNCP pada layer input
Pada layer input terdapat delapan neuron, seperti yang ditunjukkan pada Gambar 5. Pada layer kompetitif terdapat empat neuron, seperti yang ditunjukkan oleh Gambar 6, sedangkan layer output memiliki 1 neuron.
lz {2,1}
C. Fuzzy Logic Controller (FLC)
FLC digunakan untuk mengendalikan kecepatan generator dan mengatur arus medan untuk pengurangan rugi daya. Kendali kecepatan menggunakan metode fuzzy PD+I kontroller, sedangkan pengaturan arus medan menggunakan fuzzy inferensi biasa. Skema fuzzy PD+I kontroller ditunjukkan pada Gambar 7.
GCE
Gambar 7. Skema fuzzy PD+I kontroller untuk kendali kecepatan generator
Dalam simulasi, kedua fuzzy digabung menjadi satu dengan tiga input dan dua output. Gambar 7 menunjukkan fungsi keanggotaan input FLC, yang terdiri dari error kecepatan, perubahan error dan kecepatan putaran generator.
MFs input1 FLC2
-0.1 -0.05 0 0.05 0.1
MFs input2 FLC2
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
MFs input3 FLC2
Gambar 8. Fungsi keanggotaan input FLC
Untuk kendali kecepatan input FLC yang digunakan adalah error dan perubahan error kecepatan dengan output torka elektromagnetik. Arus jangkar referensi sumbu q dihitung dengan persamaan (13). Untuk mengatur rugi daya digunakan error dan kecepatan generator sebagai input FLC, sedangkan outputnya arus medan sumbu d. Gambar 9 menunjukkan fungsi keanggotaan output FLC.
-0.2 0 0.2 0.4 0.6 0.8 1
MFs Output1 FLC2
100 110 120 130 140 150 160 170 180 190 20
MFs output2 FLC2
Gambar 9. Fungsi keanggotaan output FLC
Aturan dasar (rule base) FLC untuk kedua output FLC terdapat dalam TABEL I dan II. TABEL I adalah aturan dasar untuk kendali kecepatan generator, sedangkan TABEL II aturan dasar untuk pengaturan rugi daya generator.
TABELI. ATURAN DASAR FLC UNTUK KENDALI KECEPATAN GENERATOR
IV. HASIL SIMULASI DAN PEMBAHASAN Simulasi dilakukan dengan menggunakan program MATLAB. Simulasi dilakukan pada kecepatan angin 5 m/s sampai 10 m/s. Simulasi pertama dilakukan dengan menggunakan PI kontroller. Dalam simulasi ini kecepatan referensi generator diatur secara manual, sehingga didapatkan kecepatan referensi untuk titik daya maksimum pada setiap variasi kecepatan angin. Hasil simulasi menunjukkan bahwa daya maksimum terdapat pada koefisien daya 0.48 dan TSR 8.09 dengan kecepatan referensi seperti yang terdapat dalam TABEL III. Kecepatan referensi ini detraining dengan NNCP dan hasilnya ditunjukkan dalam TABEL III.
TABELIII. KECEPATAN REFERENSI GENERATOR UNTUK DAYA MAKSIMUM
v merupakan kecepatan angin,
Z
r*
adalah kecepatan referensi generator,C
padalah koefisien daya danO
adalah TSR. Gambar 10 menunjukkan karakteristik daya mekanik turbin angin saat kecepatan turbin divariasikan secara manual.0 500 1000 1500
0
Kecepatan putaran turbin (rpm)
P
Karakteristik Day a mekanik turbin angin
10 m/s
Gambar 10. Karakteristik daya mekanik turbin angin
Gambar 11 menunjukkan grafik koefisien daya dan TSR saat generator dioperasikan pada kecepatan referensi untuk daya maksimum dengan kecepatan angin 5 m/s sampai 10 m/s.
0 1 2 3 4 5 6 7
Koef isien day a pada titik day a maksimum
0 1 2 3 4 5 6 7
10 Tip Speed Ratio (TSR) pada titik day a maksimum
Sampling waktu
TS
R
Gambar 11. Grafik koefisien daya dan TSR saat generator dioperasikan pada kecepatan referensi untuk daya maksimum
Simulasi kedua menggunakan NNCP dan FLC. Gambar 12 menunjukkan hasil simulasi pada kecepatan angin 5 m/s.
0 1 2 3 4 5 6 7
Kecepatan putaran generator
Sampling waktu
x 104 Day a output Generator
Sampling waktu
Wa
tt
ids v ariabel
ids konstan
Arus medan (ids*)
Sampling waktu
Am
per
e ids konstan
ids v ariabel
Gambar 12. Hasil simulasi pada kecepatan angin 5 m/s
output generator yang lebih besar seperti yang ditunjukkan grafik daya output generator pada Gambar 12.
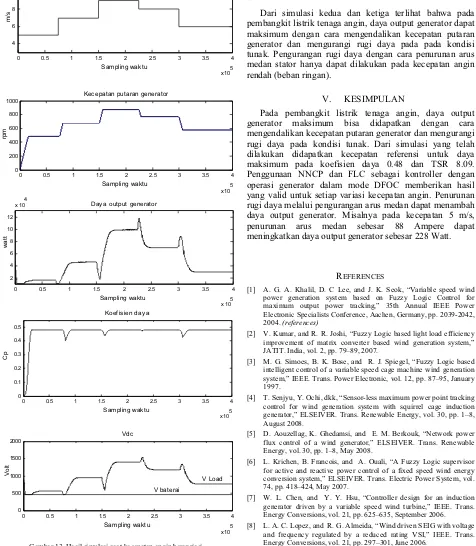
Dalam simulasi ketiga, kecepatan angin dibuat bervariasi. Hasil simulasi ketiga ditunjukkan pada Gambar 13.
0 0.5 1 1.5 2 2.5 3 3.5 4
x 105 4
6 8 10
Kecepatan angin
Sampling waktu
m/s
0 0.5 1 1.5 2 2.5 3 3.5 4
x 105 0
200 400 600 800 1000
Kecepatan putaran generator
Sampling waktu
rp
m
0 0.5 1 1.5 2 2.5 3 3.5 4 x 105 2
4 6 8 10 12
x 104 Day a output generator
Sampling waktu
wa
tt
0 0.5 1 1.5 2 2.5 3 3.5 4 x 105 0
0.1 0.2 0.3 0.4 0.5
Koef isien day a
Sampling waktu
Cp
0 0.5 1 1.5 2 2.5 3 3.5 4
x 105 0
500 1000 1500 2000
Vdc
Sampling waktu
Volt
V baterai
V Load
Gambar 13. Hasil simulasi saat kecepatan angin bervariasi
Saat kecepatan angin bervariasi (seperti yang ditunjukkan oleh grafik kecepatan angin pada Gambar 13), generator tetap berputar sesuai dengan kecepatan referensi. Hal ini menunjukkan bahwa generator tetap beroperasi pada titik daya maksimum walaupun kecepatan angin divariasikan. Daya output generator maksimum juga ditunjukkan oleh grafik koefisien daya yang selalu berada pada nilai maksimum walaupun kecepatan angin divariasikan.
Dari simulasi kedua dan ketiga terlihat bahwa pada pembangkit listrik tenaga angin, daya output generator dapat maksimum dengan cara mengendalikan kecepatan putaran generator dan mengurangi rugi daya pada pada kondisi tunak. Pengurangan rugi daya dengan cara penurunan arus medan stator hanya dapat dilakukan pada kecepatan angin rendah (beban ringan).
V. KESIMPULAN
Pada pembangkit listrik tenaga angin, daya output generator maksimum bisa didapatkan dengan cara mengendalikan kecepatan putaran generator dan mengurangi rugi daya pada kondisi tunak. Dari simulasi yang telah dilakukan didapatkan kecepatan referensi untuk daya maksimum pada koefisien daya 0.48 dan TSR 8.09. Penggunaan NNCP dan FLC sebagai kontroller dengan operasi generator dalam mode DFOC memberikan hasil yang valid untuk setiap variasi kecepatan angin. Penurunan rugi daya melalui pengurangan arus medan dapat menambah daya output generator. Misalnya pada kecepatan 5 m/s, penurunan arus medan sebesar 88 Ampere dapat meningkatkan daya output generator sebesar 228 Watt.
REFERENCES
[1] A. G. A. Khalil, D. C Lee, and J. K. Seok, “Variable speed wind power generation system based on Fuzzy Logic Control for maximum output power tracking,” 35th Annual IEEE Power Electronic Specialists Conference, Aachen, Germany, pp. 2039-2042, 2004. (references)
[2] V. Kumar, and R. R. Joshi, “Fuzzy Logic based light load efficiency improvement of matrix converter based wind generation system,” JATIT. India, vol. 2, pp. 79–89, 2007.
[3] M. G. Simoes, B. K. Bose, and R. J. Spiegel, “Fuzzy Logic based intelligent control of a variable speed cage machine wind generation system,” IEEE. Trans. Power Electronic, vol. 12, pp. 87–95, January 1997.
[4] T. Senjyu, Y. Ochi, dkk, “Sensor-less maximum power point tracking control for wind generation system with squirrel cage induction generator,” ELSEIVER. Trans. Renewable Energy, vol. 30, pp. 1–8, August 2008.
[5] D. Aouzellag, K. Ghedamsi, and E. M. Berkouk, “Network power flux control of a wind generator,” ELSEIVER. Trans. Renewable Energy, vol. 30, pp. 1–8, May 2008.
[6] L. Krichen, B. Francois, and A. Ouali, “A Fuzzy Logic supervisor for active and reactive power control of a fixed speed wind energy conversion system,” ELSEIVER. Trans. Electric Power System, vol. 74, pp. 418–424, May 2007.
[7] W. L. Chen, and Y. Y. Hsu, “Controller design for an induction generator driven by a variable speed wind turbine,” IEEE. Trans. Energy Conversions, vol. 21, pp. 625–635, September 2006. [8] L. A. C. Lopez, and R. G. Almeida, “Wind driven SEIG with voltage
[9] T. Ahmed, K. Nishida, and M. Nakaoka, “Advanced control of PWM with variable speed induction generator,” IEEE. Trans. Industry Application, vol. 42, pp. 934–945, July 2006.
[10] R. Cardenas, and R. Pena, “Sensorless vector control of induction machines for variable speed wind energy applications,” IEEE. Trans. Energy Conversion, vol. 19, pp. 196–204, March 2004.
[11] F. Blaabjerg, Z. Chen, and S. B. Kjaer, “Power electronics as efficient interface in dispersed power generation system,” IEEE. Trans. Power Electronic, vol. 19, pp. 1184–1194, July 2006. [12] T. Burton, D. Sharpe, N. Jenskin, and E. Borsanyi, Win energy
handbook. West sussex: John Wiley & Sons, 2001.
[13] I. Boldea, and S. A. Nasar, The induction machine handbook. Florida, USA: CRC Press, 2002.
[14] I. Boldea, The electric generator handbook : Variable speed generator. Boca Raton, USA: CRC Press, 2005.
[15] B. K. Bose, Modern power electronic and AC drives. Upper Saddle River, USA: Prentice Hall, 2001.
[16] T. L. Skvarenina, The power electronic handbook : Industrial electronic series. Florida, USA: CRC Press, 2002.
[17] M. Rashid, Power electronic handbook. Canada: Academic Press, 2001.
[18] N. Mohan, Power electronic converter, application and design. New York, USA: John Wiley & Sons, …..
[19] D. G. Holmes, and T. A. Lippo, Pulse width modulation for power converter. West sussex, USA: John Wiley & Sons, 2003.
[20] M. H. Purnomo, dan A. Kurniawan, Supervised neural network dan aplikasinya, Jogyakarta, Indonesia: Graha Ilmu, 2006.