18
BAB III
PERANCANGAN SISTEM
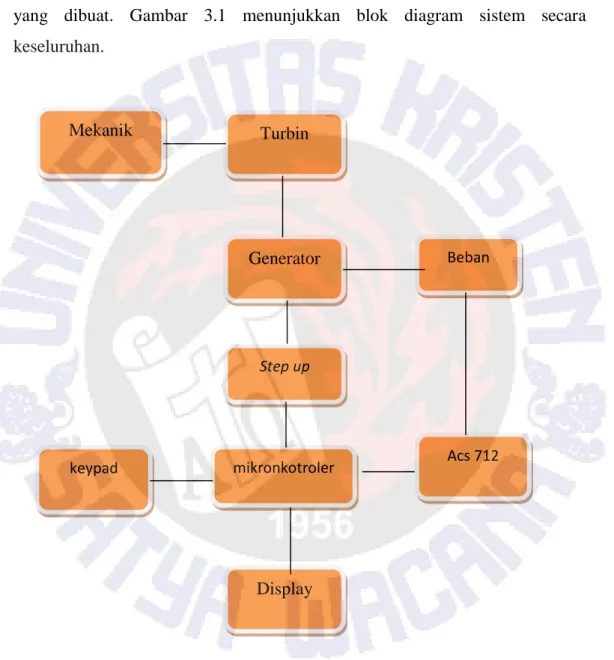
Bab ini akan membahas mengenai perancangan dan realisasi sistem yang dibuat. Gambar 3.1 menunjukkan blok diagram sistem secara keseluruhan.
Gambar 3.1. Blok Diagram Sistem Secara Keseluruhan
Mekanik Turbin Generator Display mikronkotroler keypad Beban Acs 712 Step up
19 3.1. Mekanik
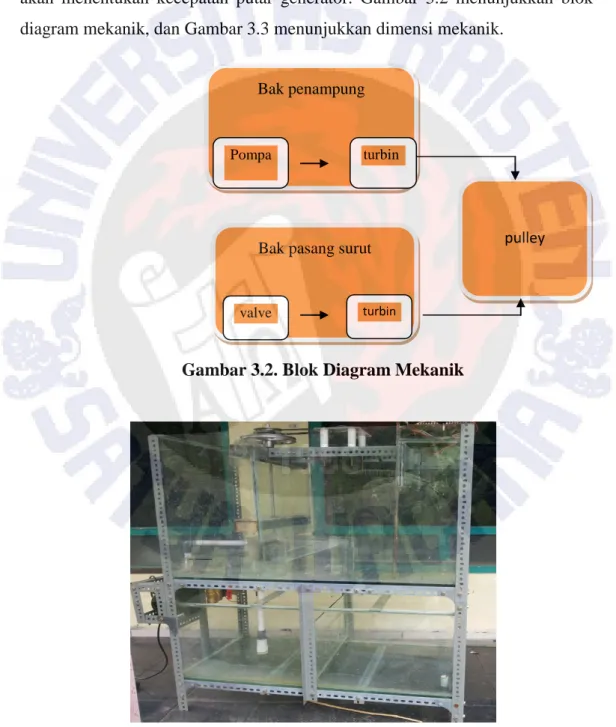
Pada bagian mekanik ini akan ditinjau dalam 2 bagian, yang pertama bak penampung yang berfungsi sebagai penampung air dari proses pasang dan surut. Terbentuknya energi potensial yang dihasilkan oleh pompa air dan valve elektrik di ubah menjadi energi kinetik untuk memutar turbin, dan yang kedua adalah pulley di mana energi kinetik dari turbin dikuatkan secara mekanis yang akan menentukan kecepatan putar generator. Gambar 3.2 menunjukkan blok diagram mekanik, dan Gambar 3.3 menunjukkan dimensi mekanik.
Gambar 3.2. Blok Diagram Mekanik
Gambar 3.3. Realisasi Mekanik Bak penampung
Pompa turbin
Bak pasang surut
valve turbin
20
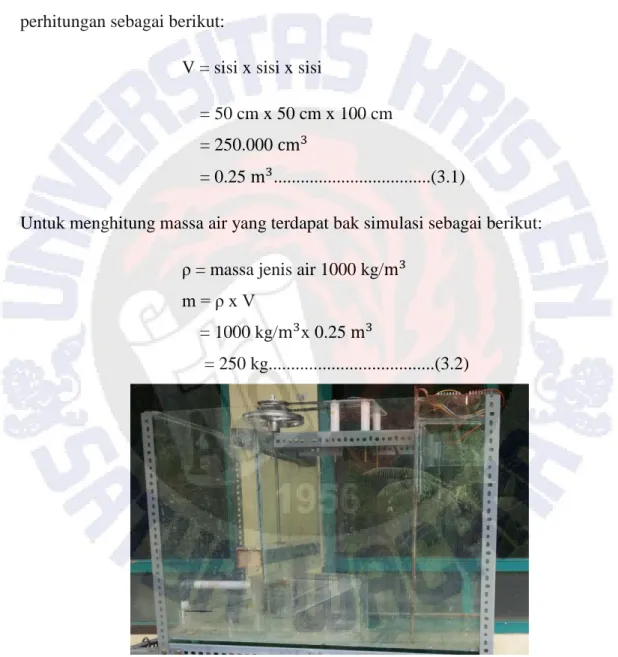
Mekanik memiliki dimensi panjang 100 cm, lebar 50 cm, dan tinggi 120 cm. Dimensi mekanik ini sekaligus menjadi dimensi keseluruhan alat. 3.1.1. Mekanik Bak Pasang Surut
Bak simulasi pasang surut dengan dimensi panjang 100 cm, lebar 50 cm, tinggi 50 cm diharapkan dapat menampung air sebanyak 0,25 , dengan perhitungan sebagai berikut:
V = sisi x sisi x sisi
= 50 cm x 50 cm x 100 cm = 250.000
= 0.25 ...(3.1)
Untuk menghitung massa air yang terdapat bak simulasi sebagai berikut: ρ = massa jenis air 1000 kg/
m = ρ x V
= 1000 kg/ x 0.25
= 250 kg...(3.2)
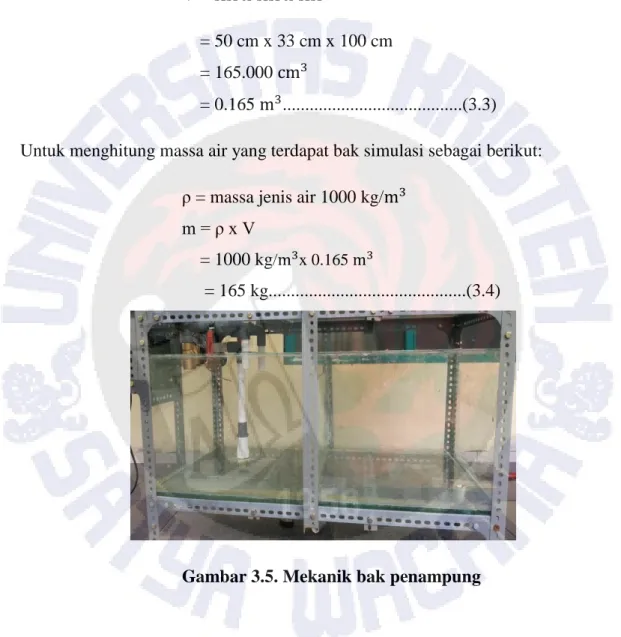
21 3.1.2. Mekanik Bak Penampung
Bak penampung dengan dimenensi panjang 100 cm, lebar 50 cm, panjang 33 cm diharapkan dapat menampung air sebanyak 0,165 , dengan perhitungan sebagai berikut:
V = sisi x sisi x sisi
= 50 cm x 33 cm x 100 cm = 165.000
= 0.165 ...(3.3) Untuk menghitung massa air yang terdapat bak simulasi sebagai berikut:
ρ = massa jenis air 1000 kg/ m = ρ x V
= 1000 kg/ x 0.165
= 165 kg...(3.4)
Gambar 3.5. Mekanik bak penampung
3.1.3. Pompa Air
Pompa air AC adalah pompa yang digerakan oleh catu daya AC atau jala – jala listrik PLN. Dalam perancangan tugas akhir ini menggunakan pompa air AC typesingle phase, Pompa air menggunakan pompa AC merk DAB dengan sepesifikasi sebagai berikut:
22 Daya = 125 watt Tegangan = 220 volt Daya hisap = 9 meter Daya dorong = 24 meter Total head = 33 meter Kapasitas = 35 liter / menit Ukuran pipa = 1 inchi x 1 inchi
Untuk menghitung energi potensial yang di hasilkan oleh pompa air sebagai berikut:
g = gravitasi bumi 9,78 m/
h = ketinggian bak penampung ke bak simulasi
Ep = m g h
= 165 kg x 9,78 m/ x 0,6 m
= 968,22 Joule...(3.5)
Gambar 3.5. Pompa air
3.1.4. Turbin (cross flow )
Turbin yang digunakan adalah turbin jenis cross flow dengan diameter 13 cm dan tinggi 10 cm, turbin memiliki 11 sirip di harapkan dapat menerima gaya maksimal dari gaya yang dihasilkan oleh pompa air. Perhitungan kecepatan putar turbin sebagai berikut :
23
Perhitungan torsi yang dihasilkan oleh turbin cross flow sebagai berikut: P =
τ x ω
3.02 w = τ x 8.45τ
= = 0.36 Nm...(3.6) Dimana : P = usaha per waktu (W)ω = kecepatan sudut turbin (rad / s) τ= torsi (Nm)
n= banyaknya putaran per menit (rpm)
Perhitungan daya yang dihasilkan oleh turbin cross flow sebagai berikut: P = = = 3.02 w...(3.7)
Perhitungan banyaknya putaran per menit yang dihasilkan oleh turbin cross flow sebagai berikut:
Diameter pully x n pully = Diameter turbin x n turbin 10 cm x 105 rpm = 13 cm x V turbin
n turbin = 80.77 rpm
Perhitungan kecepatan sudut yang dihasilkan oleh turbin cross flow sebagai berikut:
ω
= 2π
24 = 2
π
= 8.45 ...(3.8)
Gambar 3.6. Turbin ( cross flow )
3.1.5. Pulley
Dalam perancangan sekripsi ini terdapat satu pasang pulley. Pulley berdiameter 10 cm yang langsung dikaitkan ke turbin dengan menggunakan as dan pulley berdiameter 5 cm yang langsung dikaitkan dengan generator. Dalam pembutan pulley ini antara pulley satu dengan yang satu dikaitkan dengan menggunakan karet ban, hal ini bertujuan untuk menghindari slip dan dapat mendapatkan putaran yang maksimal. Realisasi pulley ditunjukkan oleh Gambar 3.7.
25
Secara sederhana realisasi pulley ditunjukkan dalam Gambar 3.8.
Gambar 3.8. Gambaran pulley Secara Sederhana
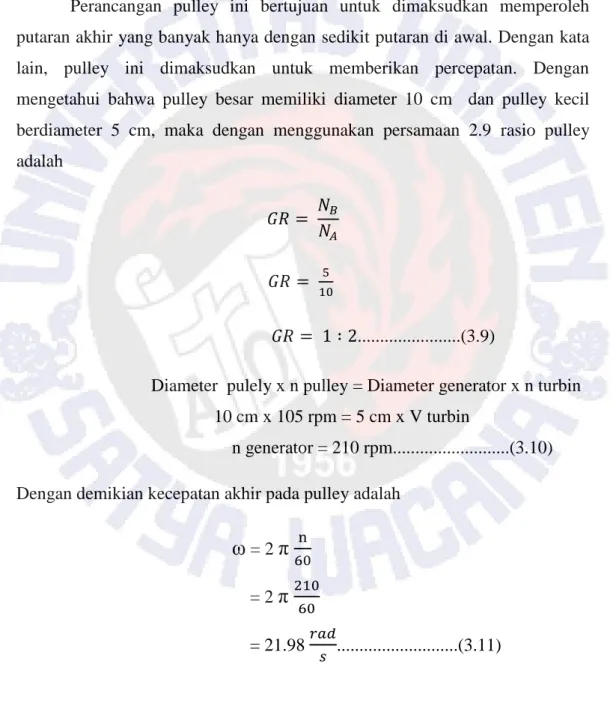
Perancangan pulley ini bertujuan untuk dimaksudkan memperoleh putaran akhir yang banyak hanya dengan sedikit putaran di awal. Dengan kata lain, pulley ini dimaksudkan untuk memberikan percepatan. Dengan mengetahui bahwa pulley besar memiliki diameter 10 cm dan pulley kecil berdiameter 5 cm, maka dengan menggunakan persamaan 2.9 rasio pulley adalah
...(3.9)
Diameter pulely x n pulley = Diameter generator x n turbin 10 cm x 105 rpm = 5 cm x V turbin
n generator = 210 rpm...(3.10) Dengan demikian kecepatan akhir pada pulley adalah
ω
= 2π
= 2π
= 21.98 ...(3.11) A B26 3.1.6. Valve Elektrik
Pada perancangan sekripsi ini digunakan Solenoid valve dengan kran elektrik straight metal base AC 220 V 3/4 inchi, sepesifikasi sebagai berikut:
Merk : Kloid
Vsuplay : AC 220 V
Orifice : 20 mm
Ukuran : Drat In – Out pipe size ¾ Inch Operating pressure : Min 0 kg/cm2 – max 10 kg/ cm2
Temp : -5 derajat celsius sampai 100 derajat celcius Dimensi body : panjang 9 cm x diameter 4,5 cm
Berat : 700 gr
Gambar 3.9. Valve elektrik
3.2. Generator
Generator yang akan digunakan pada tugas akhir ini merupakan generator DC dengan merk SANYO DENKI BL SUPER 63BM007FXE00 dengan spesifikasi sebagai berikut: maksimal tegangan output DC 200 volt, maksimal arus output sebesar 1,6 Ampere dan menghasilkan daya maksimal sebesar 200 Watt. Dengan memenuhi persyaratan percepatan sebesar 3000 RPM.
27
Gambar 3.10. Generator SANYO DENKI BL SUPER
3.3. Kontrol Utama
3.3.1. Modul mikrokontroler
Kontrol utama adalah Arduino Mega 2560 yang digunakan untuk pengambilan dan pengolahan data sensor,Terdapat tampilan berupa seven segment dan indikator led. Tombol ON OFF untuk menghidupkan alat.
Gambar 3.11. Blok diagram sistem kontroler utama Catu daya AC 220 V
220 V AC ke 5 V DC
Arduino mega 2560 Sensor ketinggian air
Generator Pompa air valve 220 V AC ke 5 V DC Display 220 V AC ke 5 V DC keypad
28
Gambar 3.12. Arduino mega 2560 sebagai kontroler utama Tabel 3.1. Konfigurasipenggunaan pin/port Arduino Mega 2560
Nama port Fungsi
Port .2 Sensor ketinggian air bawah
Port .3 Sensor ketinggian air atas
Port. 4 Output Pompa air
Port. 5 Output Valve
Port. 6 – port. 7 Sensor Arus Port. 8 – port. 25 Display
3.3.2. Modul Sensor Arus
Besar arus maksimum yang dapat dideteksi sebesar 20A di mana tegangan pada pin keluaran akan berubah secara linear mulai dari 2,5 Volt (½×VCC, tegangan catu daya VCC = 5V) untuk kondisi tidak ada arus hingga
4,5V pada arus sebesar +20A atau 0,5V pada arus sebesar −20A (positif / negative tergantung polaritas, nilai di bawah 0,5V atau di atas 4,5V dapat dianggap lebih dari batas maksimum). Perubahan tingkat tegangan berkorelasi linear terhadap besar arus sebesar 100 mV / Ampere.
29
Gambar 3.13. Sensor arus ACS 712
3.3.3. Modul driver beban AC
Modul driver beban AC berguna untuk menghidupkan pompa air dan valve elektrik yang bekerja pada tegangan kerja 220 VAC memerlukan rangkaian driver yang bertujuan untuk pemutus dan penyambung beban pada pompa air dan valve elektrik. Gambar 3.4 menunjukkan rangkaian driver pompa air dan valve elektrik yang digunakan dalam perancangan alat peraga pasang surut air laut ( Tidal Power ) ini, MOC 3020 digunakan sebagai saklar otomatis yang akan aktif bila ada beda potensial. Fungsi dari MOC 3020 ini adalah sebagai isolator dengan bagian DC dari rangkaian kendali utama agar tidak terhubung secara langsung ke jaringan AC sehingga, dapat mencegah agar tegangan AC tidak berhubungan langsung dengan mikrokontroler sehingga tidak rusak. Selain sebagai isolator MOC 3020 tersebut sebagai antarmuka antara bagian kendali (rangkaian DC) agar dapat berkomunikasi dengan jaringan AC. TRIAC berfungsi sebagai pengendali utama pompa air dan valve elektrik untuk menggantikan fungsi saklar pemutus dan penyambung arus listrik yang besar namun, dalam rangkaian ini TRIAC berfungsi untuk mengaktifkan tegangan 220 VAC.
30
Nilai-nilai komponen pada rangkaian driver pompa air dan valve elektrik dapat dicari dengan menggunakan perhitungan sebagai berikut:
VRMS =
Sehingga, didapat harga tegangan puncak jala-jala PLN = 220 V Keluaran arus maksimum dari MOC 3020 = 1A
Untuk aktif, MOC 3020 membutuhkan arus (If) = 10 mA Forward voltage (Vf) MOC 3020 = 1,5 V
R1 =
= = 350 Ω 330 Ω...(3.12) Maka, didapatkan nilai R1 = 330 Ω
R2 =
=
311,13 Ω ≈ 330Ω...(3.13)Maka, didapatkan nilai R2 = 330Ω
Saat triac off, maka tegangan pada C1 naik secara eksponensial yang dapat dicari menggunakan rumus:
VC = 220 (1- ) =
x
) max =Dari datasheet TRIAC BT 136 diketahui
(
minimum) = 50 V/µs = 50 x31 maka, 50 x = R3.C1 = 6,22 x R3 + R2 R3 + R2 R3 + R2 428,57 Ω (minimum) 470 Ω...(3.14)
Oleh karena nilai dari R3 + R2 telah didapatkan maka, nilai dari R3 dapat dicari dengan perhitungan sebagai berikut:
R3 + R2 = 470 Ω R3 + 330 = 470 Ω
R3 = 140 Ω 150 Ω...(3.15) Maka, didapatkan nilai R3 = 150 Ω. Nilai yang akan dicari selanjutnya adalah nilai dari C1, perhitungannya sebagai berikut :
R3.C1 = 6,22 x
150.C1 = 6,22 x
C1 = 41,47nF (minimum) ...(3.16) Maka, didapatkan nilai C1 yang didekatkan dengan C1 1µF.
Prinsip kerja MOC 3020 pada perancangan ini adalah MOC 3020 akan aktif jika ada beda tegangan antara masukan kaki 1 dan 2. Jika ada beda tegangan, maka keluaran dari MOC 3020 akan memicu gate pada TRIAC sehingga TRIAC aktif dan pompa air akan hidup. Input MOC 3020 berupa keluaran tegangan dari sensor ketinggian air yang dikontrol oleh suatu mikrokontroler.
Sedangkan, cara kerja TRIAC pada pengendali fase ini adalah dengan cara memotong sebagian luasan dari tegangan AC yang berbentuk sinusoida sebab TRIAC dapat berubah dari kondisi tidak menghantar ke kondisi menghantar dan sebaliknya. Saat tegangan AC berada pada titik nol (zero crossing), TRIAC dimatikan sebesar α derajat, setelah itu TRIAC dipicu. Besar tegangan yang dihasilkan adalah:
32
Vo =
Vo =
Dari persamaan didapatkan : Vo = VRMS
Dengan mengubah nilai α dan memicu TRIAC dengan delay di mikro maka, tegangan rata akan berubah. Semakin besar α maka tegangan rata-rata AC akan semakin kecil. Nilai α yang digunakan berkisar antara 0 - rad.
3.3.4. Modul Sensor Kapasitif
Sensor ini dibuat untuk mendeteksi level ketinggian air sebagai batas pada saat pasang dan surut. Terdapat dua sensor yaitu sensor batas atas dan sensor batas bawah. Batas atas sebagai inputan valve elektrik yang telah diolah oleh mikrokontroler dan batas bawah sebagai inputan pompa air yang telah diolah oleh mikrokontroler.
Sensor ini memiliki ukuran panjang 2 cm dan lebar 1 cm pada masing – masing level. Jarak antara level satu dan yang satu berjarak 1 cm hal ini bertujuan untuk mempermudah pembacaan volume air yang ditampung oleh bak simulasi pasang surut.
33
Gambar 3.15. Sensor Kapasitif
Konstruksi sensor kapasitif yang di gunakan berupa dua buah lempengan logam yanug diletakkan sejajar dan saling berhadapan. Jika diberi tegangan antara kedua lempenug logam tersebut, maka akan timbul kapasitansi antara kedua logam tersebut. Nilai kapasitansi yang ditimbulkan berbanding lurus dengan luas permukaan lempeng logam, dan berbanding terbalik dengan jarak antara kedua lempeng dan berbanding lurus dengan zat antara kedua lempeng tersebut (dielektrika), seperti di tunjukkan oleh persamaan berikut:
A = sisi x sisi = 0.02 m x 0.01 m = 0.0002 ...(3.17) C =
εr
= 18= 0.
36 F...(3.18)34 Di mana: