isprs archives XLI B3 207 2016
Teks penuh
Gambar
Garis besar
Dokumen terkait
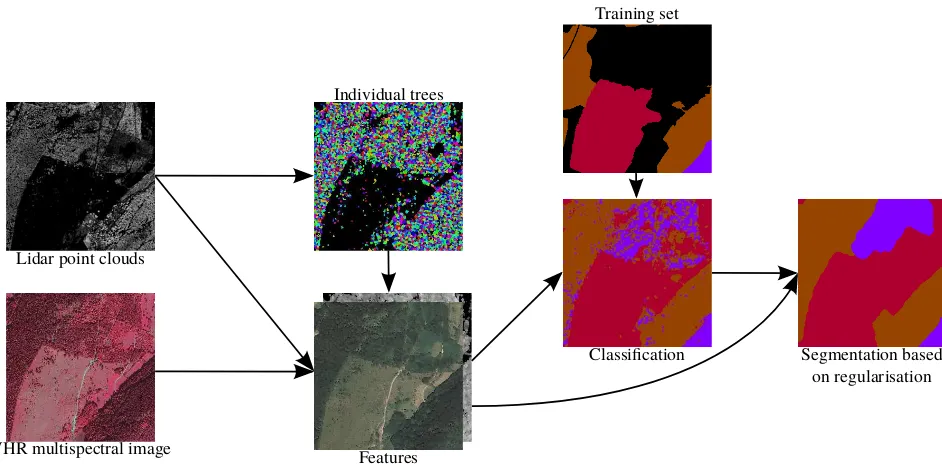
Two main processes were involved: (1) automatic extraction of building roofs using the integration of LiDAR data and aerial imagery in order to derive its’ outline and areal
Our study investigated the impact of building heights on 3D urban density, the frequently used Floor Area Ratio (FAR), estimation from spaceborne stereo
(2010) proposed a method of comparing LiDAR data and existing building models by double-thresholds strategy, and building change detection accuracy was further improved
generation of point cloud from imagery using semi-global image imaging technology, detection of buildings from the generated point cloud, classification of
While in image matching method, filtering DSM to obtain DTM using LIDAR processing approach in photogrammetric processes, especially when meet heavy forestry area,
Urban scene classification based on aerial LiDAR points can guide surface reconstruction techniques in urban modeling, piecewise planar surfaces are used for precise
Morphotectonic analysis of the long-term surface expression of the 2009 l’aquila earthquake fault (central italy) using airborne lidar data. Object-oriented identification of
Our approach for 3D feature point extraction from LiDAR data consists of five major steps: (i) generating range images, (ii) corner detection on range images, (iii)
