isprs archives XLII 2 W3 259 2017
Teks penuh
Gambar



Garis besar
Dokumen terkait
Figure 9: 3D visualization of a fragment of the fortified settlement developed using Blender tools. Each of the developed models was used for multi-criteria spatial analyses in
The camera distances used for the image calibration acquisition and mapping accuracy assessment were 1.5 metres in the laboratory, and 15 and 25 metres on the field using a Sony
Another stage of the work regards the 3D survey with reality- based techniques of all the remains still visible in order to have a starting point for the
After the analysis of the projection quality of the measured surfaces, it was stated that the best results were obtained using the Leica C10 scanner, while the
Once a laser scanning project needs to be georeferenced, Trimble SX10 scanning total station presents the advantage of requiring only one device in the field, whether georeferencing
3 shows an image of the scene captured from the perspective of the fixed camera used for scanning, a subset of the extracted laser curves in white and the computed intersection
- Georeferenced those laser scanning and photogrammetric data - Accurately merged point clouds from different origins - Extracted the digital terrain model in such a craggy place
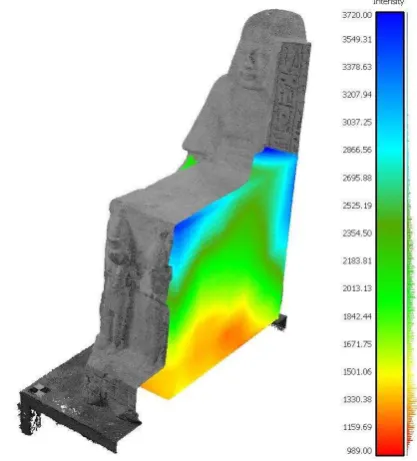
The objective of this study is to investigate the use of high resolution photogrammetric point clouds together with two novel hyperspectral cameras in VNIR and
