isprs archives XLII 2 W3 377 2017
Teks penuh
Gambar
Garis besar
Dokumen terkait
The direct modelling is considered the “traditional” way to work: in this environment, the objects have only geometrical or material attributes, and they are defined by mesh
Exploiting this information and the knowledge of the point density at each specified neighborhood it is possible to categorize points in two groups; pathology and
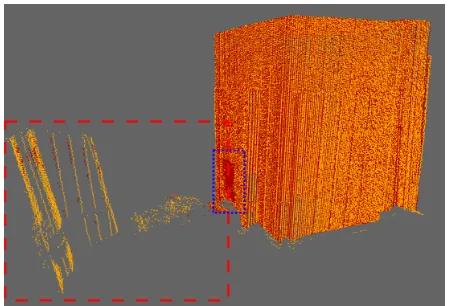
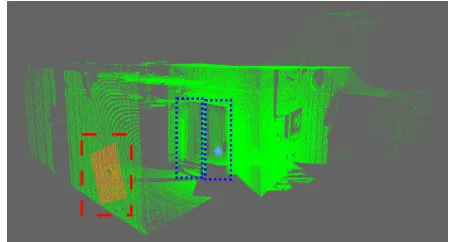
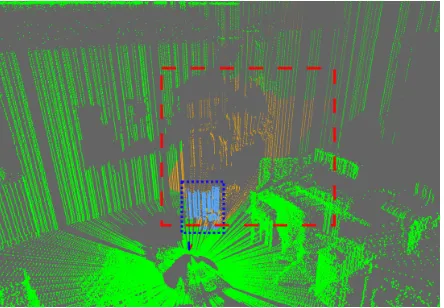
Historical point cloud (interior view of the Zwinger) The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Volume XLII-2/W3, 2017..
Through this paradigm, in the mid-90s began to develop a new technology derived from real-world application of this Virtual Reality; characterized by inserting objects or
Building up the database by the aggregation of point cloud models, survey metadata, topographic data and photos allowed different integrated queries of all kind
reference to a point cloud from NIKON D800 data The errors of the point cloud generated from video data relative to the points derived from the high resolution digital
The experiments presented in the next sections (accuracy of image orientation, point cloud generation and surface extraction) were always carried out with a
In the main case study of this thesis, through employing the Hijazi Architectural Objects Library (HAOL) as a plug-in Autodesk Revit family to the JHBIM model
