BAB IV
HASIL PENGUJIAN DAN ANALISIS
Pada bab ini akan dibahas mengenai pengujian alat serta analisis dari hasil pengujian. Tujuan dilakukan pengujian adalah mengetahui sejauh mana hasil perancangan alat yang telah dibahas pada Bab III, serta mengetahui tingkat keberhasilan setiap spesifikasi yang telah diajukan.
4.1.Pengujian Mode Blok
Pada mode ini robot tidak akan merespon gerakan apapun selain fokus terhadap bola dan jatuh apabila bola dieksekusi, kemudian robot dapat membuang bola menjauhkan dari gawang setelah bangun. Robot tidak akan terganggu dengan pemilihan mode lain sesuai kriteria jarak yang telah ditetapkan untuk masuk ke mode blok.
Pengujian akan dilakukan dengan melakukan simulasi pertandingan selama beberapa kali 5 menit sampai data yang dibutuhkan terpenuhi. Bola pada jarak-jarak tertentu untuk melakukan pengujian tentang perilaku dari robot dalam menginisialisasi mode blok, dan hasil pengujiannya dapat dilihat pada Tabel 4.1
Tabel 4.1 Pengujian mode blok
Variasi Jarak Bola
Terhadap Robot (cm)
Jumlah Percobaan
Terhadap Variasi Jarak
Keberhasil an Jatuh Menghalau
Waktu Keberhasilan
Menghalau (ms)
Keberhasil an Membuang
Bola
Waktu Keberhasil
an Membuang
Bola (s)
20-38 7 1 485 7 47
40-78 20 19 387,36 12 63,41
80-84 3 3 396,67 2 63,57
Hasil pengujian di atas selain untuk dapat menentukan presentase keberhasilan dari algoritma yang dibuat, hasil pengujian ini juga dapat digunakan untuk menganalisis atribut pada decision tree.
posisi membelakangi bola sehingga bola tidak ada pada jangkauan pandang robot kiper. Diluar kondisi itu robot kipper dapat menjauhkan bola dengan presentase keberhasilan 100%. Analisis mengenai deicision tree akan dibahas selanjutnya.
1. Analisis decision tree mode blok
Gambar 4.1. Analisis decision tree mode blok
Dengan mengacu pada decision tree mode blok yang ada pada bab III serta hasil pengujian yang sudah dilakukan didapat data-data yang ada pada Gambar 4.1. Berdasarkan analisis decision tree di atas dapat dihitung information gain dari mode
blok. Untuk atribut “Jarak bola?” jumlah sampel positif diambil dari tabel hasil pengujian di mana jarak bola ke kiper yang jaraknya lebih dari sama dengan 40 cm, sedangkan jumlah sampel negatif diambil dari jarak bola ke kiper yang jaraknya kurang dari 40 cm. Untuk atribut “Memantau bola apakah bola ke daerah pinalti?(<80 cm)”, dari node sebelah kiri nilainya diambil dari jarak bola ke kiper yang jaraknya kurang dari 80 cm, sedangkan jumlah sampel positif dan negatifnya diambil dari keberhasilan kiper membuang bola, jika berhasil maka positif, jika gagal berarti negatif, dan yang sebelah kanan sampelnya diambil dari jarak bola ke kiper yang jaraknya lebih dari sama dengan 80 cm, dan merupakan sempel negatif. Perhitungan mengenai information gain dapat dijabarkan sebagai berikut.
Dari kedua perhitungan menunjukan bahwa hasil yang didapat kurang dari 1 bit. Keluaran dalam satuan bit di sini untuk menggambarkan total informasi yang didapat, jika 1 bit maka ada 2 informasi yang terkandung di dalamnya, namun jika kurang dari 1 bit itu berarti ada kurang dari 2 informasi yang terkandung di dalam peristiwa di atas. Selain itu hasil perhitungan juga menunjukan atribut “Memantau bola apakah bola ke
daerah pinalti?(<80 cm)” bernilai lebih kecil dari atribut “Jarak bola?”, berarti atribut yang dominan di sini adalah atribut “Memantau bola apakah bola ke daerah pinalti?(<80
cm)” sehingga atribut “Jarak bola?” bisa dihilangkan. Sehingga decision tree untuk mode blok ini dapat dilihat pada Gambar 4.2.
Gambar 4.2. Decision tree mode blok setelah dianalisis.
4.2.Pengujian Mode Siaga
Pada mode ini robot mengamati bola apakah bola berada di kanan atau di kiri. Robot akan menyesuaikan posisi bola, dan jika bola ditendang robot akan jatuh menghalau. Mode blok ini akan terinisialisasi saat bola berada jauh (±80 cm) dari robot.
Pengujian akan dilakukan dengan melakukan simulasi pertandingan selama beberapa kali 5 menit sampai data yang dibutuhkan terpenuhi. Bola akan diposisikan pada jarak-jarak tertentu untuk melakukan pengujian tentang perilaku dari robot dalam menginisialisasi mode siaga.
Dapat dilihat pada tabel hasil pengujian, dari 30 kali percobaan yang telah dilakukan menghasikan keberhasilan sebanyak 30 kali (100%) tanpa adanya kegagalan.
Tabel 4.2 Pengujian mode siaga
Variasi Jarak
Bola Terhadap
Robot (cm)
Jumlah Percobaan
Terhadap Variasi
Jarak
Keberhasilan Memposisikan Diri Terhadap
Bola
Waktu Hingga Memposisikan Diri Terhadap
Bola (s)
Keberhasilan Jatuh Menghalau
Waktu untuk
jatuh
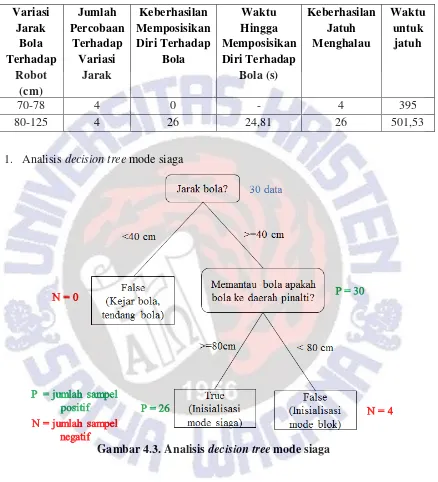
70-78 4 0 - 4 395
80-125 4 26 24,81 26 501,53
1. Analisis decision tree mode siaga
Gambar 4.3. Analisis decision tree mode siaga
Seperti yang sudah dilakukan pada mode blok sebelumnya kita dapat menganalisis information gain yang ada pada decision tree pada Gambar 4.3 ini dengan mengacu pada decision tree mode siaga yang ada pada bab III, serta hasil pengujian
yang telah dilakukan. Pada Atribut “Jarak bola?” jumlah sampel negatif diambil dari
Kemudian pada atribut “Memantau bola apakah bola ke daerah pinalti?”, jumlah sampel positif didapat dari jarak bola ke kiper yang lebih dari sama dengan 80 cm, kemudian jumlah sampel negatif didapat dari jarak bola ke kiper yang kurang dari 80 cm.
2. Perhitungan information gain
jika kita perhatikan pada Atribut “Jarak bola?” kita bisa melihat bahwa jarak bola pada mode ini tidak ada yang kurang dari 40 cm sehingga menyebabkan Atribut “Jarak
bola?” ini selalu bernilai true, jika terjadi demikian maka bila dihitung nilai dari entropy(Jarak bola?)akan memiliki nilai 0 dan Information Gain(Jarak bola?) juga pada akhirnya akan memiliki nilai 0.
Kemudian pada Atribut “Memantau bola apakah bola ke daerah pinalti?” kita bisa menghitung nilainya karena di kedua node memiliki nilai dengan bobot yang berbeda sehingga pada atribut ini jika kita hitung nantinya akan memiliki bobot Information Gain. Perhitungan Information Gain pada atribut “memantau bola apakah bola ke daerah pinalti?” akan dijabarkan sebagai berikut.
bits
Bits
Dari perhitungan ini menunjukan bahwa atribut “Jarak bola?” bernilai lebih kecil
dominan di sini adalah atribut “Jarak bola?” sehingga atribut “Memantau bola apakah
bola ke daerah pinalti?” bisa dihilangkan. Sehingga Decision Tree untuk mode blok ini menjadi sebagai berikut.
Gambar 4.4. Decision Tree mode siaga setelah dianalisis.
4.3.Pengujian Mode Siap
Pada mode ini robot menerima komunikasi dari robot penyerang yang menandakan bahwa bola berada jauh di depan lapangan. Setelah menerima pesan dari robot penyerang, robot kiper akan kembali ke posisi awal dengan menginisialisasi mode
siap ini.
Pengujian akan dilakukan dengan melakukan simulasi pertandingan selama beberapa kali 5 menit sampai data yang dibutuhkan terpenuhi. Komunikasi akan dikirim dari robot penyerang secara manual agar menginisialisasi mode siap serta mengujinya apakah mode ini berhasil diselesaikan dengan baik. Tabel hasil pengujian dapat dilihat pada Tabel 4.3.
Tabel 4.3 Pengujian mode siap
Robot Menerima Komunikasi
Simpangan (cm)
Jumlah Keberhasilan Menyesuaikan
Kompas
Jumlah Keberhasilan
kembali Ke Tengah Gawang
Waktu yang dibutuhkan
Untuk Kembali (s)
Data hasil pengujian di atas merupakan data yang dapat menunjukan tingkat keberhasilan dari mode siap dan keberhasilannya yaitu 100%. Kemudian kejanggalan pengukuran waktu yang diberi tanda bintang(*) pada Lampiran A Tabel A.3 dalam mode siap ini terjadi karena waktu yang dibutuhkan untuk kembali membutuhkan waktu yang sangat lama, dikarenakan adanya toleransi kompas.
Gambar 4.5. Toleransi kompas yang dialami robot
Pada contoh yang dapat dilihat pada Gambar 4.5. Toleransi ini menyebabkan robot yang seharusnya sudah benar berada segaris dengan titik pinalti menjadi seolah-olah titik tersebut masih berada di kiri atau kanannya (pada Gambar 4.5 titik terlihat
masih berada di kiri robot). Hal ini disebabkan karena langkah robot yang sedikit tidak akurat membentuk kurva.
1. Analisis awal decision tree mode siap
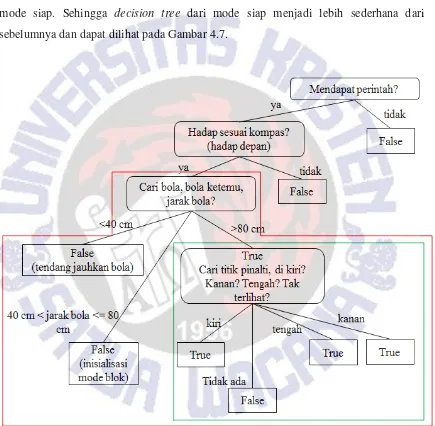
Dalam menganalisis decision tree mode siap ini perlu pertimbangan-pertimbangan lain agar dapat menyederhanakan decision tree yang ada, selanjutnya akan dibahas oleh penulis dengan detail menggunakan gambar serta penjelasan secara lengkap.
sehingga robot kiper tidak perlu lagi mencari bola, karena jika pencarian dilakukan pun robot kiper tidak dapat menemukannya karena posisi bola yang terlalu jauh.
Kemudian pada bagian yang ditandai dengan garis hijau di mana mencari titik pinalti juga sebenarnya itu merupakan bagian dari mode siap, tidak perlu menjabarkan sampai sedetail itu mengenai keberadaan dari titik, karena hal itu sudah dijabarkan pada bagian diagram blok di awal. Bagian tersebut merupakan bagian penginisialisasian dari mode siap. Sehingga decision tree dari mode siap menjadi lebih sederhana dari sebelumnya dan dapat dilihat pada Gambar 4.7.
Gambar 4.7. Decision tree algoritma mode siap setelah analisis awal.
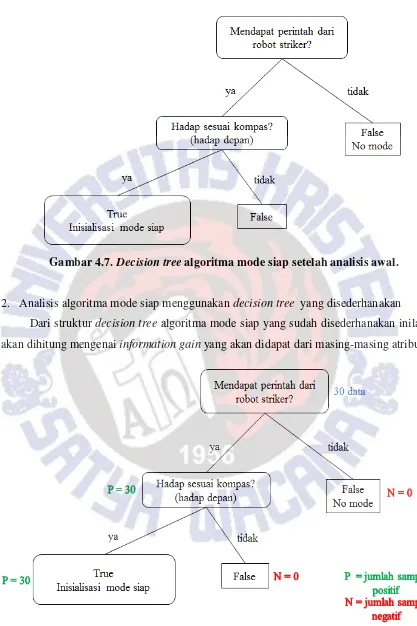
2. Analisis algoritma mode siap menggunakan decision tree yang disederhanakan Dari struktur decision tree algoritma mode siap yang sudah disederhanakan inilah
akan dihitung mengenai information gain yang akan didapat dari masing-masing atribut.
Dari hasil pengujian yang telah dilakukan, dapat dilihat pada Gambar 4.8 di mana
pada atribut “Mendapat perintah dari robot striker?” memiliki jumlah sampel positif
sebanyak 30 didapat dari banyaknya komunikasi yang diterima dari robot penyerang dan memang kenyataannya pada 30 kali percobaan semuanya menggunakan komunikasi dari robot penyerang, sehingga menyebabkan jumlah sampel negatifnya berjumlah 0.
Kemudian pada atribut “Hadap sesuai kompas?” memiliki jumlah sampel positif sebanyak 30 didapat dari keberhasilan robot dalam menyesuaikan kompas, kemudian jumlah sampel negatif sebanyak 0 didapat dari robot yang tidak pernah gagal dalam menyesuaikan kompas.
3. Perhitungan serta analisis nilai information gain
Jika diperhatikan data yang didapat pada hasil pengujian menunjukan hasil seperti pada Gambar 4.8 di atas di mana jika salah satu node tidak memiliki nilai peluang atau peluangnya bernilai 0 maka nilai entropy maupun information gain dari suatu atribut akan bernilai 0 pula. Sehingga Atribut “Mendapat perintah dari robot striker?” maupun
Atribut “Hadap sesuai kompas?” tidak memiliki bobot prioritas sama sekali.
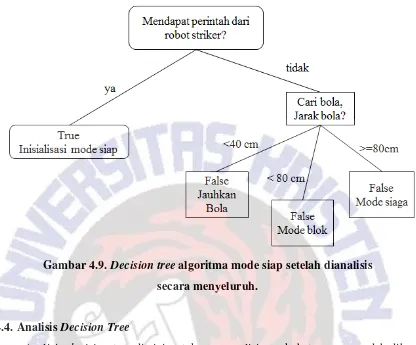
Untuk Atribut “Hadap sesuai kompas?” bisa dihilangkan karena memang atribut ini tidak memiliki peranan yang penting karena robot kiper selalu berhasil dalam menyesuaikan diri terhadap kompas, selain itu juga pengambilan keputusan untuk
menyesuaikan kompas merupakan bagian dari mode siap. Namun untuk Atribut
“Mendapat perintah dari robot striker?” tidak bisa dihilangkan karena dalam
Gambar 4.9. Decision tree algoritma mode siap setelah dianalisis secara menyeluruh.
4.4.Analisis Decision Tree
Analisis decision tree di sini untuk menganalisis apakah tree yang sudah dibuat untuk mode blok, mode siaga, dan mode siap benar-benar efektif dan berhasil sesuai
dengan presentase keberhasilan yang diharapkan pada spesifikasi. Dengan mengklasifikasikannya menurut pertanyaan berdasarkan tujuan dari pembuatan masing-masing mode, serta trial and error yang dilakukan selama pembuatan algoritma pada robot, didapat susunan decision tree yang telah disusun secara detail sesuai dengan penjabaran pada masing-masing mode sebelumnya dan akan dijabarkan sebagai berikut.
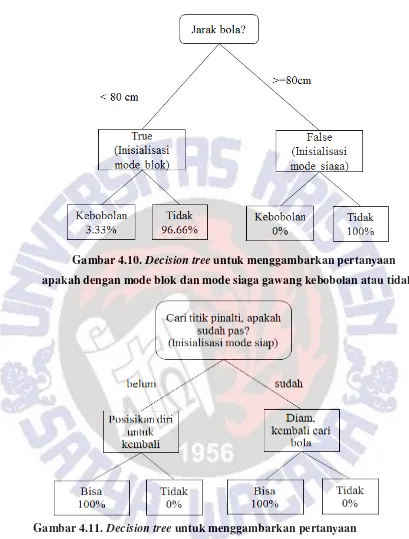
Berdasarkan tujuan utama yang dibuat untuk robot kiper yaitu, apakah robot kiper
bisa menjaga gawang dengan baik tanpa kebobolan atau “apakah kebobolan skor?”
Gambar 4.10. Decision tree untuk menggambarkan pertanyaan apakah dengan mode blok dan mode siaga gawang kebobolan atau tidak.
Gambar 4.11. Decision tree untuk menggambarkan pertanyaan apakah mode siap bisa dilakukan atau tidak
Kemudian untuk mode yang lain yaitu mode siap, muncul juga pertanyaan apakah robot dapat bergerak dengan efisien untuk memposisikan dirinya berada di tengah
Pada susunan decision tree di atas menunjukan susunan decision tree secara keseluruhan serta memperlihatkan keluaran berupa presentase dari hasil yang didapat. Terlihat dari mode siap yang sudah dibahas sebelumnya pada tree yang dibuat beserta hasil perhitungan yang menunjukan bahwa atribut “Mendapat perintah dari robot
striker?” pada mode siap dapat dihilangkan, nyatanya atribut tersebut merupakan atribut yang penting dari keseluruhan algoritma. Kesimpulannya di sini menunjukan bahwa Teori information gain untuk menghitung atribut mana yang prioritas bisa diterapkan atau bisa juga tidak, dengan melihat keseluruhan algoritma sebagai suatu kesatuan, bukan hanya sebagai mode-mode yang terpisah.
4.5.Pengujian Mode Kembali
Kemudian mode yang terakhir ini hanya aktif secara manual saat pickup dilakukan, seperti yang sudah dijelaskan sebelumnya mode ini merupakan pilihan terakhir apabila robot mengalami error. Pengujian yang dilakukan untuk mode ini yaitu robot akan dijalankan dari tepi lapangan dan akan dihitung jumlah keberhasilan robot kembali dengan benar ke depan gawang dapat dilihat pada Tabel 4.4.
Tabel 4.4 Pengujian mode kembali
Jumlah Percobaan
Jumlah Keberhasilan
kembali
Jumlah Kegagalan
Kembali
Waktu yang dibutuhkan Untuk Menyelesaikan
Pickup
30 25 5 9 menit 4 detik
Terlihat dari percobaan yang dilakukan didapat keberhasilan 25 kali dan gagal 5 kali (83% keberhasilan). Kriteria keberhasilan ditentukan sendiri oleh penulis yaitu robot dapat kembali dalam waktu kurang dari 10 menit, atau berkisar antara 9 menit 50 detik dengan anggapan 10 detik sisanya masih dapat dilakukan eksekusi terakhir. Sehingga pada data yang diambil ada beberapa kegagalan karena waktu yang ditempuh untuk mencapai tempat menjaga gawang lebih dari 9 menit 50 detik.
4.6.Durasi Perpindahan Antar Mode
Dari hasil percobaan yang didapat dengan melakukan debugging menggunakan logcat yang ada pada eclipse, waktu perpindahan yang dibutuhkan sistem untuk berpindah ke mode lain sangatlah cepat. Dapat dilihat dari Gambar 4.12 yang menunjukan perpindahan mode ke mode blok dari proses sebelumnya hanya membutuhkan waktu 90 ms.
Gambar 4.12. Durasi perpindahan ke mode lain di dalam sistem
Namun pada kenyataanya waktu perpindahan yang dibutuhkan ke lain mode di dalam kondisi lapangan yang dinamis membutuhkan waktu yg relative berbeda-beda sesuai kondisi robot, letak bola, dan posisi robot, arah hadap kepala robot. Ditunjukan pada Gambar 4.13 di mana waktunya sekitar 2 detik karena pengaruh kondisi lapangan yang dinamis.
Gambar 4.13 Durasi perpindahan ke mode lain dalam keadaan nyata
4.7.Prilaku robot saat lomba berlangsung
Pada saat Kontes Robot Sepak Bola tingkat regional berlangsung robot kiper tidak teruji kemampuannya secara penuh, karena bola sangat jarang sampai ke daerah sendiri, kemampuan yang teruji hanya mode siaga saja, dan saat itu robot sama sekali tidak dapat kesempatan untuk menepis bola, sehingga pada saat lomba tingkat regional berlangsung tim R2C tidak kebobolan skor sama sekali.
saat robot kiper sedang mencari bola ke arah kanan, bola ditendang ke arah kirinya sehingga robot tidak melihat bola yang datang. Sehingga tim robot R2C hanya mendapat kesempatan untuk bertanding memperebutkan juara III melawan UGM dan diakhiri dengan adu pinalti, robot dari tim lawan tidak pernah berhasil menendang dengan benar ke arah gawang, namun robot kiper tetap merespon tendangan tersebut dengan jatuh sesuai arah tendangan.