21
BAB IV
PENGUJIAN DAN ANALISIS
Pada bab ini akan ditampilkan dan dijelaskan mengenai pengujian sistem dan
dokumuentasi data-data percobaan yang telah direalisasikan sesuai dengan spesifikasi
yang telah disetujui pada surat tugas.
4.1. Pengujian Sistem Pembangkit Koordinat.
Pengujian sistem pembangkit lintasan dilakukan untuk menguji hasil dari
persamaan-persamaan fungsi pembangkit koordinat x, y, dan z terhadap waktu untuk
engkel dan panggul robot. Pengujian dilakukan dengan memberikan masukan berupa
parameter gerakan yang divariasikan dan melihat hasil kurva dari fungsi koordinat
terhadap waktu yang dihasilkan. Pengujian fungsi pembangkit lintasan arah x, y, dan z
dilakukan secara terpisah untuk setiap arah koordinat pada engkel dan panggul. Pengujian
ini dilakukan sepenuhnya melalui perangkat lunak.
4.1.1. Fungsi Koordinat x(t)
Pengujian fungsi x(t) untuk engkel dilakukan dengan lima variasi parameter jarak
langkah f yaitu 5, 10, 15, 20, dan 25. Kurva yang dihasilkan untuk satu periode langkah.
Periode langkah ditentukan sebesar 20. Periode langkah adalah jumlah counter waktu
yang dilakukan untuk melakukan satu kali melangkahkan kaki.
Dari grafik pada Gambar 4.1, dapat dilihat bahwa fungsi pembangkit mampu
menghasilkan titik-titik koordinat arah x yang membentuk sebuah kurva lintasan engkel,
di mana kurva yang dihasilkan sesuai dengan kelima parameter yang ditentukan. Untuk
nilai parameter jarak langkah akan menentukan kecepatan berjalan robot, maka untuk
mendapatkan nilai terbaik melalui pengujian fisik dengan robot. Semakin besar jarak
langkah robot maka robot berjalan semakin cepat. Tetapi bila terlalu jauh keseimbangan
22
Gambar 4.1 Kurva koordinat x engkel terhadap waktu selama satu periode langkah
dangan variasi parameter jarak langkah (f).
Pengujian fungsi x(t) untuk panggul dilakukan dengan lima variasi parameter faktor
bentuk αx yaitu 1, 2, 3, 4, dan 5. Kurva yang dihasilkan untuk satu periode langkah.
Periode langkah ditentukan sebesar 20. Dan jarak langkah yang digunakan adalah 25.
Gambar 4.2 Kurva koordinat x panggul terhadap waktu selama satu periode langkah dengan variasi parameter faktor bentuk (αx).
23
Dari grafik pada Gambar 4.2 dapat dilihat pengaruh nilai faktor bentuk αx terhadap bentuk kurva. Saat nilai αx = 1, kurva yang dihasilkan linear. Semakin besar nilai αx maka nilai koordinat x(t) panggul semakin cepat bertambah di awal dan akhir periode langkah
dan jaraknya semakin jauh. Dari kurva tersebut dapat dilihat bahwa nilai optimal untuk gerakan panggul adalah dengan faktor bentuk αx di bawah 3 supaya nilai koordinat tidak mengalami penurunan ketika di tengah periode atau kurva tidak bergelombang.
Pada Gambar 4.3 ditunjukkan posisi titik x(t1) yaitu awal posisi engkel dan panggul
sebelum melangkah, dan x(t2) yaitu posisi akhir engkel setelah melangkah, titik x=0
berada pada pusat kaki robot yang tidak mengayun.
Gambar 4.3 Posisi awal dan akhir engkel dan panggul robot pada sumbu x untuk satu
periode langkah.
4.1.2. Fungsi Koordinat y(t)
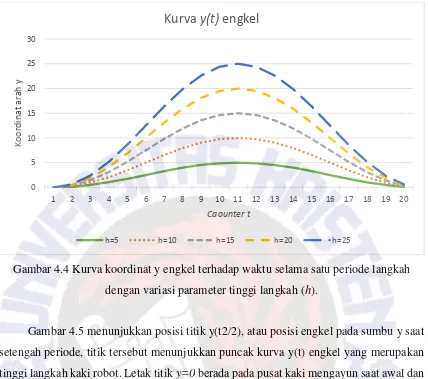
Pengujian fungsi y(t) untuk engkel dilakukan dengan lima variasi parameter tinggi
langkah h yaitu 5, 10, 15, 20, dan 25. Kurva yang dihasilkan untuk satu periode langkah.
Periode langkah ditentukan sebesar 20.
Dari grafik pada Gambar 4.4 dapat dilihat bahwa fungsi pembangkit mampu
menghasilkan titik-titik koordinat arah y yang membentuk sebuah kurva lintasan engkel,
di mana kurva yang dihasilkan sesuai dengan kelima parameter yang ditentukan. Tinggi
langkah akan mempenaruhi keseimbangan robot saat berjalan pada fase SSP, maka perlu
pengujian fisik untuk mendapatkan nilai optimal. Semakin tinggi langkah robot, gerakan
berjalan semakin tidak seimbang tetapi robot dapat mencapai jarak langkah kaki yang
lebih jauh. Untuk mengurangi ketidakseimbangan robot dapat dilakukan dengan
mempercepat periode langkah.
24
Gambar 4.4 Kurva koordinat y engkel terhadap waktu selama satu periode langkah
dengan variasi parameter tinggi langkah (h).
Gambar 4.5 menunjukkan posisi titik y(t2/2), atau posisi engkel pada sumbu y saat
setengah periode, titik tersebut menunjukkan puncak kurva y(t) engkel yang merupakan
tinggi langkah kaki robot. Letak titik y=0 berada pada pusat kaki mengayun saat awal dan
akhir langkah.
Gambar 4.5 Posisi engkel robot pada sumbu y pada saat puncak langkah kaki pada
setengah periode.
0 5 10 15 20 25 30
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20
Koo
rd
in
at
a
ra
h
y
Caounter t
Kurva
y(t)
engkel
h=5 h=10 h=15 h=20 h=25
25 4.1.3. Fungsi Koordinat z(t)
Pengujian fungsi z(t) untuk engkel yang dilakukan dengan lima variasi parameter
langkah samping (A) yaitu 5, 10, 15, 20, dan 25. Untuk rasio langkah samping (η)
ditetapkan 1. Kurva yang dihasilkan untuk satu periode langkah. Periode langkah
ditentukan sebesar 20.
Gambar 4.6 Kurva koordinat z engkel terhadap waktu selama satu periode langkah
dengan variasi parameter lebar langkah samping (A).
Dari grafik pada Gambar 4.6 dapat dilihat bahwa fungsi menghasilkan titik-titik koordinat
yang membentuk kurva sesuai dengan nilai parameter yang ditentukan. Dalam hal ini parameter
lebar langkah samping (A) menentukan jarak bentangan kaki ke samping yang dicapai saat akhir
periode langkah. Nilai lebar langkah samping A menentukan kecepatan gerakan berjalan ke
samping, di mana ditentukan berdasarkan percobaan fisik.
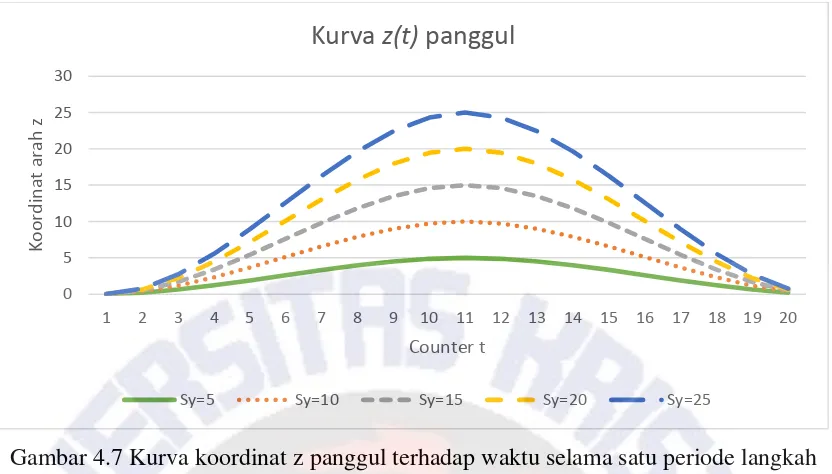
Pengujian fungsi z(t) untuk panggul, yang pertama adalah variasi parameter jarak
simpangan panggul (Sy) yaitu 5, 10, 15, 20, dan 25, sementara faktor bentuk ditetapkan 1. Kurva
yang dihasilkan adalah untuk satu periode langkah. Periode langkah ditentukan sebesar 20.
Dari grafik pada Gambar 4.7 dapat dilihat bahwa fungsi menghasilkan kurva yang sesuai
dengan nilai parameter yang ditentukan. Pada kurva tersebut terlihat pergerakan panggul ke salah
satu arah dalam satu periode, pergerakan ini mempengaruhi keseimbangan robot pada fase SSP
karena panggul robot bergerak ke kiri saat kaki kanan diangkat. Maka nilai parameter Sy harus
disesuaikan dengan tinggi langkah robot. Semakin tinggi langkah robot, simpangan panggul Sy
semakin besar. Tetapi bila terlalu besar maka robot akan jatuh ke arah kaki yang berpijak.
26
Gambar 4.7 Kurva koordinat z panggul terhadap waktu selama satu periode langkah
dengan variasi parameter lebar simpangan pinggul ke samping (Sy).
Pengujian untuk fungsi z(t) panggul yang kedua adalah variasi faktor bentuk αz, yaitu 1,
10, 20, 30, dan 40. Parameter Syyang digunakan adalah 20.
Gambar 4.8 Kurva koordinat z panggul terhadap waktu selama satu periode langkah
dengan variasi parameter faktor bentuk kurva (αz).
Dari Gambar 4.8 dapat dilihat bahwa faktor bentuk αz mempengaruhi bentuk dari
kurva lintasan panggul robot. Di mana semakin besar nilai αz maka gerakan panggul
Sy=5 Sy=10 Sy=15 Sy=20 Sy=25
27
semakin halus karena kurva lebih seperti kurva parabola. Maka untuk mendapatkan
gerakan berjalan yang stabil digunakan parameter αz yang cukup besar, yaitu antara
20-30.
Gambar 4.9 menunjukkan posisi engkel dan panggul pada arah sumbu z. Gambar
4.8(a) menunjukkan posisi engkel robot pada arah z, di mana z(t1) merupakan posisi awal
sebelum melangkah ke samping dan z(t2) merupakan posisi akhir setelah melangkah ke
samping. Titik z=0 untuk engkel berada pada pusat kaki mengayun sebelum melangkah.
Pada Gambar 4.8(b) ditunjukkan posisi panggul robot, di mana posisi puncak simpangan
panggul z(t2/2) dicapai ketika setengah periode. Posisi titik z=0 untuk panggul berada
pada pusat panggul sebelum melangkah.
(a) (b)
Gambar 4.9 Posisi pada sumbu z dari (a) engkel robot untuk satu periode langkah
samping, dan (b) panggul robot pada puncak simpangan panggul saat setengah periode.
4.2. Pengujian Sistem Pembangkit Pola Berjalan
Pengujian sistem pembangkit pola gerakan berjalan dilakukan untuk mengetahui
pola pergantian langkah yang dihasilkan oleh sistem. Pengujian dilakukan dengan
menjalankan sistem untuk beberapa periode gerakan berjalan dengan satu set parameter
yang telah ditentukan. Pengujian dilakukan untuk masing-masing kurva x,y,dan z secara
terpisah pada kedua kaki robot.
Z= 0
28 4.2.1. Pembangkit Pola Berjalan x(t)
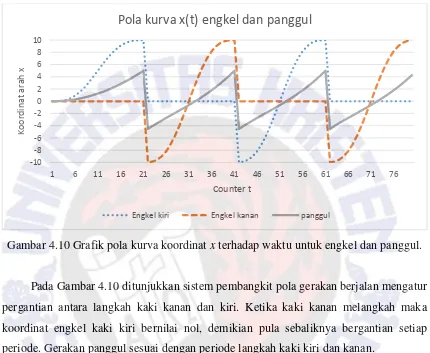
Pengujian pembangkit pola berjalan arah x dilakukan dengan parameter gerakan
jarak langkah f=10, dan faktor bentuk αx=1. Periode langkah ditentukan 20 dan dilakukan
4 kali periode.
Gambar 4.10 Grafik pola kurva koordinat x terhadap waktu untuk engkel dan panggul.
Pada Gambar 4.10 ditunjukkan sistem pembangkit pola gerakan berjalan mengatur
pergantian antara langkah kaki kanan dan kiri. Ketika kaki kanan melangkah maka
koordinat engkel kaki kiri bernilai nol, demikian pula sebaliknya bergantian setiap
periode. Gerakan panggul sesuai dengan periode langkah kaki kiri dan kanan.
Gambar 4.11 menunjukkan kurva lintasan sumbu x terhadap waktu yang merupakan
hasil dari selisih koordinat engkel dan panggul. Kurva ini yang kemudian direalisasikan
menjadi gerakan berjalan robot melalui sistem inverse kinematic.
-10
Pola kurva x(t) engkel dan panggul
29
Gambar 4.11 Grafik pola kurva koordinat arah x terhadap waktu akhir untuk kaki kanan
dan kiri hasil selisih koordinat engkel dan panggul.
4.2.2. Pembangkit Pola Berjalan y(t)
Pengujian pembangkit pola berjalan arah y dilakukan dengan parameter gerakan
jarak langkah h=10. Periode langkah ditentukan 20 dan dilakukan 4 kali periode.
Gambar 4.12 Grafik pola kurva koordinat y terhadap waktu.
Gambar 4.12 menunjukkan pola kurva lintasan arah y langkah kaki, di mana
pergantian langkah dilakukan sesuai periode langkah.
30 4.2.3. Pembangkit Pola berjalan z(t)
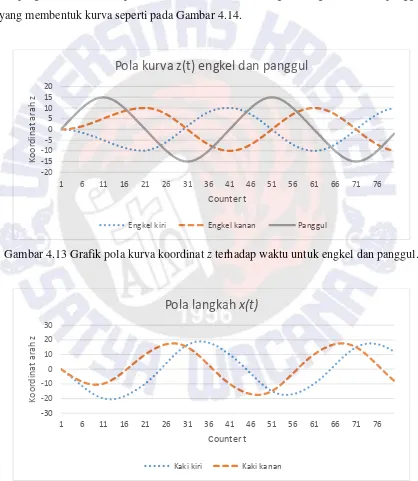
Pengujian pembangkit pola berjalan arah z dilakukan dengan parameter gerakan
jarak langkah samping A=10, jarak simpangan panggul ke samping Sy=15, dan faktor
bentuk αz=20. Periode langkah ditentukan 20 dan dilakukan 4 kali periode.
Pada Gambar 4.13 terlihat pola gerakan langkah samping pada arah sumbu z.
Sistem dapat mengatur pergantian langkah kaki kanan dan kiri untuk gerakan langkah
samping. Hasil akhir merupakan selisih antara korrdinat engkel dengan koordinat panggul
yang membentuk kurva seperti pada Gambar 4.14.
Gambar 4.13 Grafik pola kurva koordinat z terhadap waktu untuk engkel dan panggul.
Gambar 4.14 Grafik pola kurva koordinat arah z terhadap waktu akhir untuk kaki kanan
dan kiri hasil selisih koordinat engkel dan panggul.
-20
Pola kurva z(t) engkel dan panggul
Engkel kiri Engkel kanan Panggul
31 4.2.4. Pembangkit Pola Gerakan Berputar
Untuk pembangkit gerakan berputar ditentukan oleh parameter heading di mana
fungsi linear digunakan untuk menghasilkan putaran kaki. Pengolahan parameter heading
langsung pada sistem inverse kinematic, pada tugas akhir ini heading hanya untuk
menentukan derajat perputaran kaki robot. Pola yang dihasilkan dapat dilihat pada
Gambar 4.15.
Gambar 4.15 Grafik pola perubahan sudut putaran kaki robot terhadap waktu.
4.3. Pengujian Pembangkit Lintasan
Pada pengujian ini koordinat yang sudah didapatkan dari fungsi pembangkit
koordinat engkel dan panggul dibentuk menjadi sebuah kurva lintasan dalam bidang
kartesian.
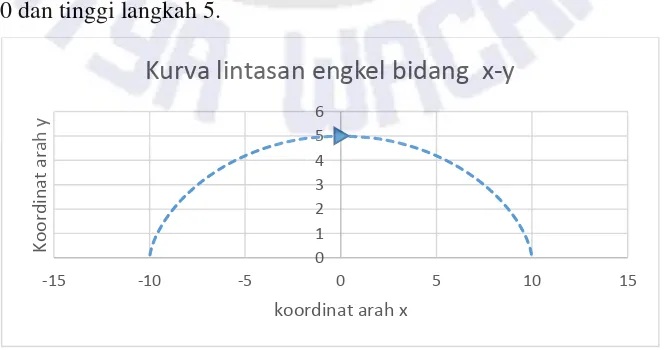
Gambar 4.16 menunjukkan lintasan engkel pada bidang sagital atau bidang xy. Pada
bidang ini ditunjukkan lintasan langkah robot ke depan dengan parameter gerakan jarak
langkah 20 dan tinggi langkah 5.
Gambar 4.16 Kurva lintasan engkel bidang xy
-10
32
Gambar 4.17 menunjukkan lintasan engkel pada bidang frontal atau bidang zy. Pada
bidang ini ditunjukkan lintasan langkah robot ke samping dengan parameter gerakan jarak
langkah samping 5 dan tinggi langkah 10.
Gambar 4.17 Kurva lintasan engkel bidang zy
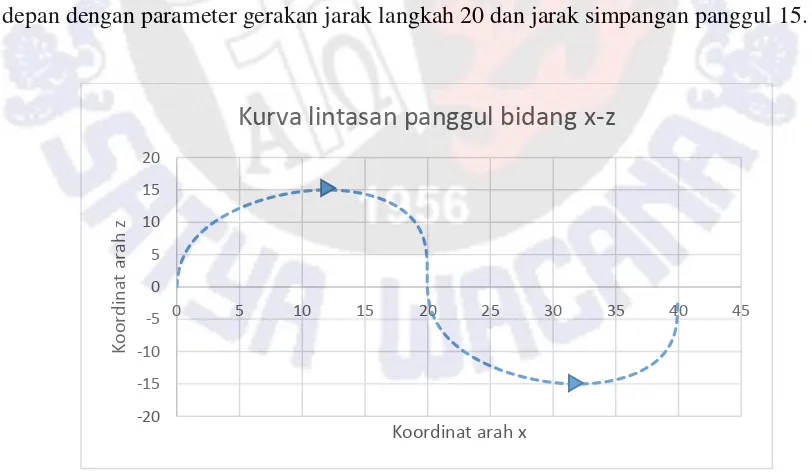
Gambar 4.18 menunjukkan lintasan panggul pada bidang transversal atau bidang
xz untuk dua kali periode langkah. Pada bidang ini ditunjukkan lintasan langkah robot ke
depan dengan parameter gerakan jarak langkah 20 dan jarak simpangan panggul 15.
Gambar 4.18 Kurva lintasan engkel bidang xz
0
Kurva lintasan engkel bidang z-y
-20
33 4.4. Pengujian Penerapan Sistem pada Robot
Pada pengujian ini keseluruhan sistem perencanaan gerakan berjalan diujikan
secara langsung pada robot. Sistem dijalankan untuk melihat performa sistem
membangkitkan gerakan berjalan robot. Pengujian dilakukan untuk enam jenis gerakan
dasar yaitu gerakan maju, mundur, geser kanan, geser kiri, putar kanan, dan putar kiri.
Pengujian dilakukan dengan menjalankan robot pada permukaan karpet sejauh 2
meter untuk setiap gerakan, untuk gerakan putar dilakukan putaran 3600. Setiap pengujian
dilakukan perulangan sebanyak 10 kali. Gerakan-gerakan tersebut dibentuk dengan
mengatur parameter-parameter gerakan yang menghasilkan pola gerakan yang sesuai.
Penentuan parameter tiap gerakan didapatkan melalui proses eksperimen yang tidak
tercatat untuk mendapatkan hasil yang terbaik. Hasil dari pengujian ini adalah tingkat
keberhasilan robot melaksanakan gerakan dan kecepatan gerakan robot. Pengujian
dilakukan tanpa sistem pengendali keseimbangan.
4.4.1.Pengujian Gerakan Berjalan Maju
Parameter gerakan berjalan maju yang digunakan seperti pada Tabel 4.1. Parameter
utama gerakan adalah jarak langkah f, di mana nilai positif akan membuat robot berjaan
maju. Semakin besar nilai jarak langkah maka robot berjalan semakin cepat.
Tabel 4.1 Parameter gerakan berjalan maju
Nama Parameter Nilai
Periode langkah 45
Jarak langkah ( f ) 35
Tabel 4.2 menunjukkan hasil pengujian gerakan berjalan maju. Dari hasil pengujian
didapatkan tingkat keberhasilan 9 dari 10 percobaan, atau 90%. Kecepatan rata-rata yang
34
Tabel 4.2 Hasil pengujian gerakan berjalan maju
Percobaan ke- Jatuh / Tidak jatuh Waktu (s) Kecepatan (cm/s)
1 Tidak jatuh 14.4 13.89
2 Tidak jatuh 14.1 14.18
3 Jatuh - -
4 Tidak jatuh 14.5 13.79
5 Tidak jatuh 13.8 14.49
6 Tidak jatuh 14.6 13.7
7 Tidak jatuh 14.2 14.08
8 Tidak jatuh 13.4 14.92
9 Tidak jatuh 13.9 14.39
10 Tidak jatuh 14.3 13.99
4.4.2.Pengujian Gerakan Berjalan Mundur
Parameter gerakan berjalan mundur yang digunakan seperti pada Tabel 4.3.
Parameter utama gerakan adalah jarak langkah f, di mana nilai negatif akan membuat
robot berjaan mundur.
Tabel 4.3 Parameter gerakan berjalan mundur
Nama Parameter Nilai
Periode langkah 45
Jarak langkah ( f ) -20
Tinggi langkah ( h ) 50
Faktor bentuk x ( αx ) 1.5
Simpangan panggul ( Sy ) 20
Faktor bentuk z ( αz ) 38
Lebar langkah samping ( A ) 0
Rasio langkah samping ( η ) 1
Heading 0
Tabel 4.4 menunjukkan hasil pengujian gerakan berjalan mundur. Dari hasil
pengujian didapatkan tingkat keberhasilan 10 dari 10 percobaan, atau 100%. Kecepatan
35
Tabel 4.4 Hasil pengujian gerakan berjalan mundur
Percobaan ke- Jatuh / Tidak jatuh Waktu (s) Kecepatan (cm/s)
1 Tidak jatuh 37.1 5.39
2 Tidak jatuh 35.6 5.62
3 Tidak jatuh 36.6 5.46
4 Tidak jatuh 34.4 5.81
5 Tidak jatuh 33.8 5.92
6 Tidak jatuh 35.3 5.67
7 Tidak jatuh 36.9 5.42
8 Tidak jatuh 34.1 5.87
9 Tidak jatuh 37.5 5.33
10 Tidak jatuh 35.3 5.67
4.4.3.Pengujian Gerakan Geser Kanan
Parameter gerakan geser kanan yang digunakan seperti pada Tabel 4.5. Parameter
utama gerakan adalah lebar langkah samping A, di mana nilai positif akan membuat robot
bergeser ke kanan.
Tabel 4.5 Parameter gerakan geser kanan
Nama Parameter Nilai
Periode langkah 45
Jarak langkah ( f ) -3
Tinggi langkah ( h ) 30
Faktor bentuk x ( αx ) 1
Simpangan panggul ( Sy ) 20
Faktor bentuk z ( αz ) 20
Lebar langkah samping ( A ) 11
Rasio langkah samping ( η ) 0.5
Heading -2.5
Tabel 4.6 menunjukkan hasil pengujian gerakan geser kanan. Dari hasil pengujian
didapatkan tingkat keberhasilan 10 dari 10 percobaan, atau 100%. Kecepatan rata-rata
36
Tabel 4.6 Hasil pengujian gerakan geser kanan
Percobaan ke- Jatuh / Tidak jatuh Waktu (s) Kecepatan (cm/s)
1 Tidak jatuh 33.2 6.02
2 Tidak jatuh 32.7 6.11
3 Tidak jatuh 30.9 6.47
4 Tidak jatuh 32.9 6.07
5 Tidak jatuh 33.7 5.93
6 Tidak jatuh 31.4 6.36
7 Tidak jatuh 31.8 6.28
8 Tidak jatuh 32.4 6.17
9 Tidak jatuh 33.1 6.04
10 Tidak jatuh 31.1 6.43
4.4.4.Pengujian Gerakan Geser Kiri
Parameter gerakan geser kiri yang digunakan seperti pada Tabel 4.7. Parameter
utama gerakan adalah lebar langkah samping A, di mana nilai negatif akan membuat robot
bergeser ke kiri.
Tabel 4.7 Parameter gerakan geser kiri
Nama Parameter Nilai
Periode langkah 45
Jarak langkah ( f ) -4
Tinggi langkah ( h ) 30
Faktor bentuk x ( αx ) 1
Simpangan panggul ( Sy ) 20
Faktor bentuk z ( αz ) 10
Lebar langkah samping ( A ) -10
Rasio langkah samping ( η ) -1
Heading 1.7
Tabel 4.8 menunjukkan hasil pengujian gerakan geser kiri. Dari hasil pengujian
didapatkan tingkat keberhasilan 10 dari 10 percobaan, atau 100%. Kecepatan rata-rata
37
Tabel 4.8 Hasil pengujian gerakan geser kiri
Percobaan ke- Jatuh / Tidak jatuh Waktu (s) Kecepatan (cm/s)
1 Tidak jatuh 30 6.67
2 Tidak jatuh 27.8 7.19
3 Tidak jatuh 26.6 7.52
4 Tidak jatuh 28.5 7.02
5 Tidak jatuh 29.2 6.85
6 Tidak jatuh 27.5 7.27
7 Tidak jatuh 28.1 7.12
8 Tidak jatuh 28.9 6.92
9 Tidak jatuh 29.6 6.76
10 Tidak jatuh 27.3 7.33
4.4.5.Pengujian Gerakan Putar Kanan
Parameter gerakan putar kanan yang digunakan seperti pada Tabel 4.9. Parameter
utama gerakan adalah heading, di mana nilai negatif akan membuat robot berputar ke
kanan.
Tabel 4.9 Parameter gerakan putar kanan
Nama Parameter Nilai
Periode langkah 45
Jarak langkah ( f ) -8
Tinggi langkah ( h ) 40
Faktor bentuk x ( αx ) 0
Simpangan panggul ( Sy ) 15
Faktor bentuk z ( αz ) 30
Lebar langkah samping ( A ) 0
Rasio langkah samping ( η ) 0
Heading -8
Tabel 4.10 menunjukkan hasil pengujian gerakan putar kanan. Dari hasil pengujian
didapatkan tingkat keberhasilan 10 dari 10 percobaan, atau 100%. Waktu rata-rata yang
38
Tabel 4.10 Hasil pengujian gerakan putar kanan
Percobaan ke- Jatuh / Tidak jatuh Waktu (s)
1 Tidak jatuh 15.5
2 Tidak jatuh 17.5
3 Tidak jatuh 16.6
4 Tidak jatuh 17
5 Tidak jatuh 15.6
6 Tidak jatuh 15.9
7 Tidak jatuh 16.5
8 Tidak jatuh 16.3
9 Tidak jatuh 17.2
10 Tidak jatuh 17.3
4.4.6.Pengujain Gerakan Putar Kiri
Parameter gerakan putar kiri yang digunakan seperti pada Tabel 4.11. Parameter
utama gerakan adalah heading, di mana nilai positif akan membuat robot berputar ke kiri.
Tabel 4.11 Parameter gerakan putar kiri
Nama Parameter Nilai
Periode langkah 45
Jarak langkah ( f ) -8
Tinggi langkah ( h ) 40
Faktor bentuk x ( αx ) 0
Simpangan panggul ( Sy ) 12
Faktor bentuk z ( αz ) 30
Lebar langkah samping ( A ) 0
Rasio langkah samping ( η ) 0
Heading 7
Tabel 4.12 menunjukkan hasil pengujian gerakan putar kiri. Dari hasil pengujian
didapatkan tongkan keberhasilan 10 dari 10 percobaan, atau 100%. Waktu rata-rata yang
39
Tabel 4.12 Hasil pengujian gerakan putar kiri
Percobaan ke- Jatuh / Tidak jatuh Waktu (s)
1 Tidak jatuh 12.2
2 Tidak jatuh 12.3
3 Tidak jatuh 13.1
4 Tidak jatuh 13.1
5 Tidak jatuh 12.4
6 Tidak jatuh 12.8
7 Tidak jatuh 13.3
8 Tidak jatuh 12.1
9 Tidak jatuh 14.1