isprsarchives XXXIX B5 229 2012
Teks penuh
Gambar

Garis besar
Dokumen terkait
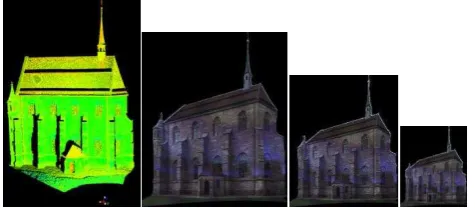
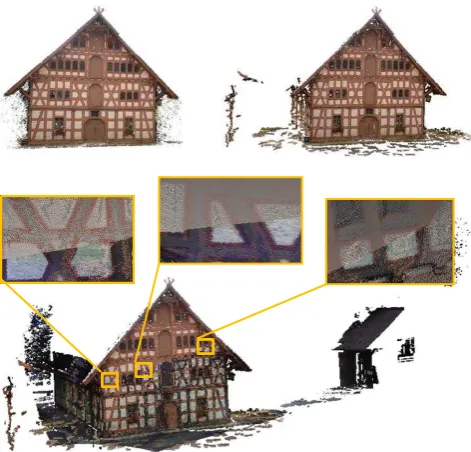
The approach proposed in this paper has shown that accurate point clouds can be delivered from both TLS and dense image matching, and thus merged for documentation in cultural
The future work involve extensive comparisons with published registration methods, and extending the proposed approach for data of dimension greater than 3, so as
At first, the method employs DLT to finish coarse registration of images to geometric model, then the weighted TPS function is used to restraint the deformation of
The problem of modeling proposed in this study, even if based on accurate data type like point cloud is like 3D modeling in computer graphics.. Using a 3D modeling
The authors have been attempting to develop convenient 3D measurement software called 3DiVision by using consumer-grade digital cameras (Chikatsu et al., 2006).
The application of operational systems for remote sensing requires new approaches for data processing. It has to be the goal to derive user relevant information close the sensor
In this study, a method for visualizing 3D Asian dust clouds in the Google Earth is described, and the time variation of the 3D concentration distribution of Asian dust clouds
The proposed method estimates the transformation parameters between reference surface and registration surface using a mathematical adjustment model.. 3D surface matching is an
