isprs archives XLI B3 269 2016
Teks penuh
Gambar
Dokumen terkait
A dvances in software for automated processing and production of 3D models from image sequences greatly expand the usability of low-cost camera systems in
Moreover, we in- troduced two new segment features for airborne point clouds de- scribing the distance and the orientation of each segment with re- spect to the closest road..
generation of point cloud from imagery using semi-global image imaging technology, detection of buildings from the generated point cloud, classification of
Also, we presented results on real point clouds acquired by a Velodyne multi-beam sensor: our optimization can be applied to any multi-beam LIDAR sensor configuration, as long as
Large point clouds like the processed results of the presented workflow may be visualized interactively using one of two visual- ization clients connected to the IQmulus
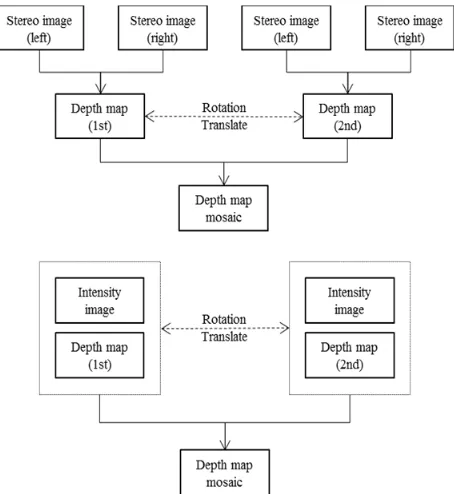
The perspective intensity image is generated directly from the point cloud by using the collinearity equation, therefore three dimensional coordinates of the tie points
XXIII ISPRS Congress, 12–19 July 2016, Prague, Czech Republic.. point clouds with a partial input from such data needs to be thoroughly investigated. Once ground points
KEY WORDS: Unmanned Arial Vehicle Photogrammetry, Remote sensing, 3D point clouds and surface models, Wetland delineation and classification, Wetland health
