isprs archives XLI B3 143 2016
Teks penuh
Gambar
Garis besar
Dokumen terkait
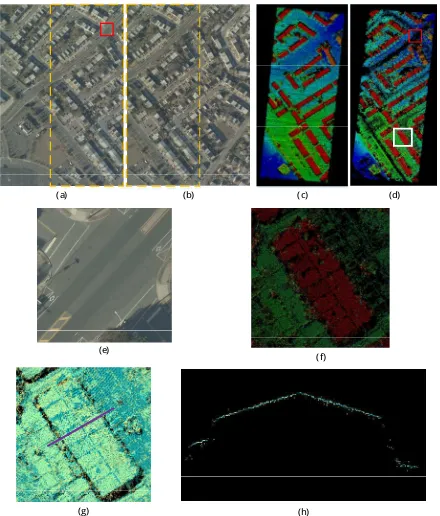
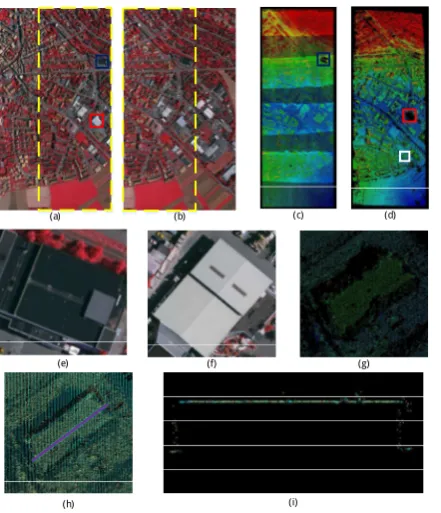
An example of extracted building outline and structure lines: (a) the image of segmented point clusters of the roof points; (b) the results of extracted boundary lines..
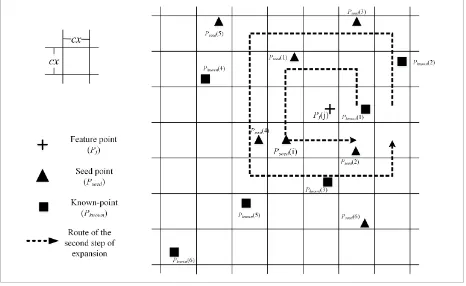
Then, use the road texture points to extract the road segments. Build buffer around key points with radius of 8, about one quar- ter of the road width. If the segments and the
In this paper, we present a stochastic approach based on marked point processes for the automatic extraction of networks in raster data. We model the network as an
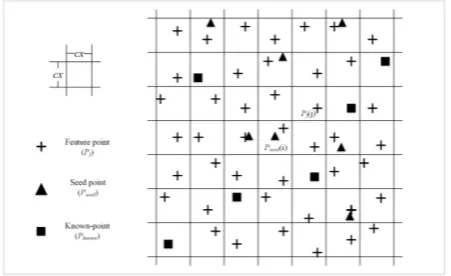
For these problems, this paper proposes an automatic road centerlines extraction method which has three major steps: (1) road center point detection based on multiple
XXIII ISPRS Congress, 12–19 July 2016, Prague, Czech Republic.. point clouds with a partial input from such data needs to be thoroughly investigated. Once ground points
In the same way, the RGDF algorithm is divided into two steps. In the first step, all points of the input views are processed sepa- rately and the desired sums are computed
The entire workflow from the camera calibration to the creation of the 3D point set is discussed, but the focus is mainly on cloud segmentation and on the image
Additionally, the reference data or selected points or objects thereof may be used as ground control points for a point cloud adjustment of the mobile mapping point clouds
