isprs archives XLI B1 389 2016
Teks penuh
Gambar
Garis besar
Dokumen terkait
Among the producers and users of these aerial systems is often argued that to perform laboratory calibration, because the algorithms of modern digital photogrammetric
The three robots are equipped with stan- dard sensors for navigation and obstacle detection (GNSS, IMU, ultrasonic sensors, navigation cameras) as well as special sen- sors
In (Molina et al., 2016), the first performance analysis of aerial image orientation and calibration in mapKITE for corridor mapping was performed, based on the
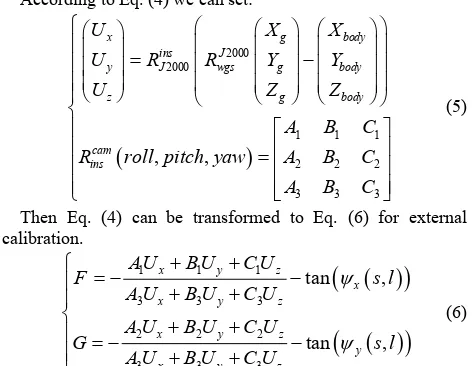
Previously described mathematical model was used in phototriangulation with self-calibration on the original images The International Archives of the
The constructed 3D point clouds from the laser scanner and the images for the first and the third data sets were used in the ICP registration to estimate the system
Therefore, with more visible GLONASS satellites and the improved GLONASS precise satellite orbit and clock products in the future, the combined GR PPP will be expected
In the literature that I have seen(HE Min, 2011a)(Miao Hongjie, 2005), in the digital camera calibration, which generally is based on outdoor standardization field or
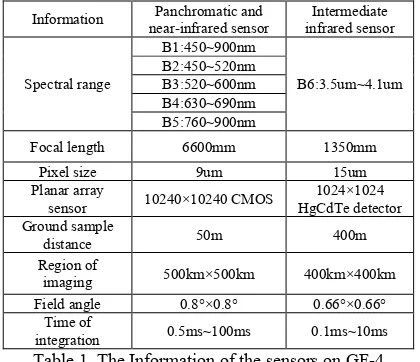
Performance assessment and in-flight calibration for the satellite RS-2, carrying multiple cameras with widely varying look angles and resolutions, is realized with the inclusion of
