23
BAB IV
PENGUJIAN DAN ANALISIS
Pada bagian ini akan dibahas mengenai pengujian yang dilakukan pada sistem serta hasil pengujian dan analisisnya. Pengujian dilakukan untuk mengetahui keberhasilan alat memenuhi spesifikasi yang telah ditentukan.
4.1 Pengujian Sensor Rotary Encoder
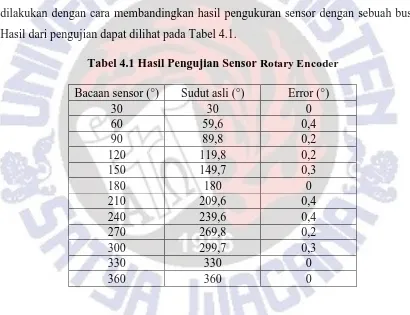
Pengujian dilakukan untuk mengetahui ketelitian sensor rotary encoder. Pengujian dilakukan dengan cara membandingkan hasil pengukuran sensor dengan sebuah busur.
Hasil dari pengujian dapat dilihat pada Tabel 4.1.
Tabel 4.1 Hasil Pengujian Sensor Rotary Encoder
Bacaan sensor (°) Sudut asli (°) Error (°) ketelitian penulis ketika mengukur sudut posisi menggunakan busur belum tentu akurat.
24 4.2 Pengujian Tanpa Gangguan
Pengujian dilakukan pada sistem open-loop dan closed-loop tanpa diberi gangguan .
4.2.1 Pengujian pada Sistem Open-loop
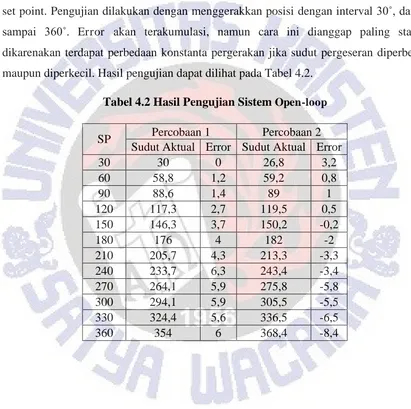
Pengujian dilakukan dengan membandingkan posisi yang dicapai sistem dengan set point. Pengujian dilakukan dengan menggerakkan posisi dengan interval 30˚, dari 0
sampai 360˚. Error akan terakumulasi, namun cara ini dianggap paling stabil, dikarenakan terdapat perbedaan konstanta pergerakan jika sudut pergeseran diperbesar maupun diperkecil. Hasil pengujian dapat dilihat pada Tabel 4.2.
Tabel 4.2 Hasil Pengujian Sistem Open-loop
25
Pengujian dilakukan setelah konstanta waktu dirasa cukup mencapai nilai set point. Kemudian diambil sampel pada percobaan 1 dan 2.
Error rata-rata setiap pergerakan 30˚ pada percobaan 1 adalah 0,5˚. Error rata-rata setiap pergerakan 30˚ pada percobaan 2adalah 0,7˚.
Error rata-rata dari kedua sampel sudah sesuai dengan hasil yang diharapkan.
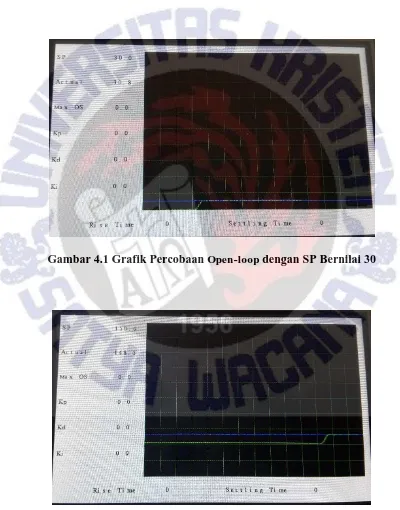
Gambar 4.1 Grafik Percobaan Open-loop dengan SP Bernilai 30
26
Gambar 4.3 Grafik Percobaan Open-loop dengan SP Bernilai 180
Garis biru pada grafik merupakan set point dan garis hijau pada grafik merupakan posisi aktual motor.
4.2.2 Pengujian pada Sistem Closed-loop
Pengujian dilakukan untuk mengetahui pengaruh perubahan nilai parameter KP, KD,
dan KI terhadap respon sistem.
4.2.2.1 Pengujian Parameter KP
Pengujian dilakukan dengan memvariasikan nilai KP pada nilai set pointtetap 180˚
27
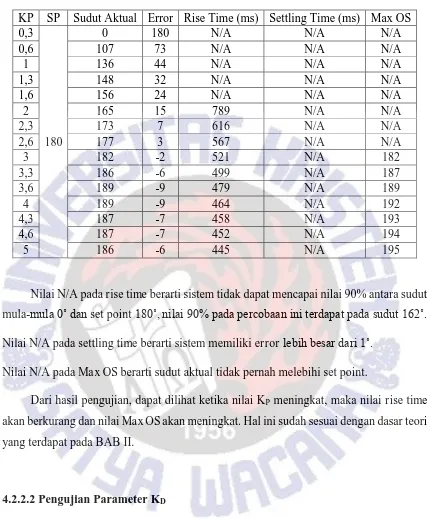
Tabel 4.3 Hasil Pengujian Parameter KP
KP SP Sudut Aktual Error Rise Time (ms) Settling Time (ms) Max OS
Nilai N/A pada rise time berarti sistem tidak dapat mencapai nilai 90% antara sudut mula-mula 0˚ dan set point180˚, nilai 90% pada percobaan ini terdapat pada sudut 162˚. Nilai N/A pada settling time berarti sistem memiliki errorlebih besar dari 1˚.
Nilai N/A pada Max OS berarti sudut aktual tidak pernah melebihi set point.
Dari hasil pengujian, dapat dilihat ketika nilai KP meningkat, maka nilai rise time
akan berkurangdan nilai Max OS akan meningkat. Hal ini sudah sesuai dengan dasar teori yang terdapat pada BAB II.
4.2.2.2 Pengujian Parameter KD
Pengujian dilakukan dengan memvariasikan nilai KD dengan nilai KP dan set point
tetap, yaitu dengan KD bernilai 4 dan set point bernilai 180˚. Kemudian melihat
pengaruhnya terhadap respon sistem. Hasil dari pengujian parameter KD dapat dilihat
28
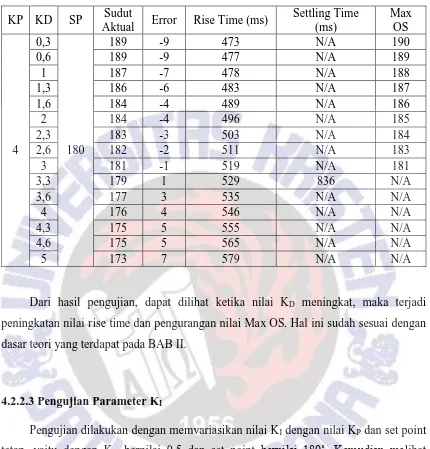
Tabel 4.4 Hasil Pengujian Parameter KD
KP KD SP Sudut
peningkatan nilai rise time dan pengurangan nilai Max OS. Hal ini sudah sesuai dengan
dasar teori yang terdapat pada BAB II.
4.2.2.3 Pengujian Parameter KI
Pengujian dilakukan dengan memvariasikan nilai KI dengan nilai KP dan set point
tetap, yaitu dengan KD bernilai 0,5 dan set point bernilai 180˚. Kemudian melihat
pengaruhnya terhadap respon sistem. Hasil dari pengujian parameter KI dapat dilihat pada
29
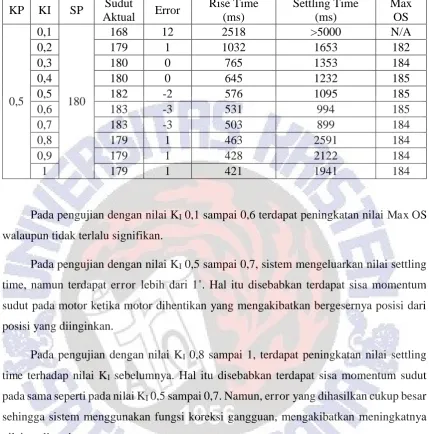
Tabel 4.5 Hasil Pengujian Parameter KI
KP KI SP Sudut
Pada pengujian dengan nilai KI 0,1 sampai 0,6 terdapat peningkatan nilai Max OS
walaupun tidak terlalu signifikan.
Pada pengujian dengan nilai KI 0,5 sampai 0,7, sistem mengeluarkan nilai settling
time, namun terdapat error lebih dari 1˚. Hal itu disebabkan terdapat sisa momentum sudut pada motor ketika motor dihentikan yang mengakibatkan bergesernya posisi dari posisi yang diinginkan.
Pada pengujian dengan nilai KI 0,8 sampai 1, terdapat peningkatan nilai settling
time terhadap nilai KI sebelumnya. Hal itu disebabkan terdapat sisa momentum sudut
pada sama seperti pada nilai KI 0,5 sampai 0,7. Namun, error yang dihasilkan cukup besar
sehingga sistem menggunakan fungsi koreksi gangguan, mengakibatkan meningkatnya nilai settling time.
Dari hasil pengujian, dapat dilihat peningkatan nilai KI akan mengurangi nilai rise
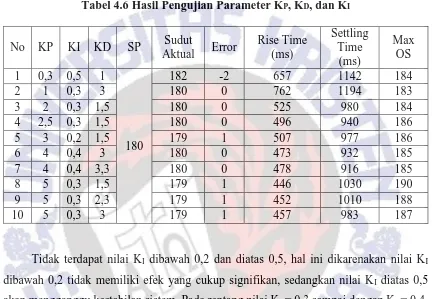
30 4.2.2.4 Pengujian Paremeter KP, KD, dan KI
Pengujian dilakukan dengan memvariasikan kombinasi KP, KD, dan KI pada nilai
set point tetap bernilai 180˚. Kemudian melihat pengaruhnya pada respon sistem. Hasil dari pengujian parameter KP, KD, dan KI dapat dilihat pada Tabel 4.6.
akan mengganggu kestabilan sistem. Pada rentang nilai KI = 0,3 sampai dengan KI = 0,4,
terlihan bahwa error dapat dikurangi bahkan dieliminasi.
Pada data 3 dan 4, dapat terlihat peningkatan nilai KP menyebabkan rise time
berkurang dan Max OS bertambah.
31
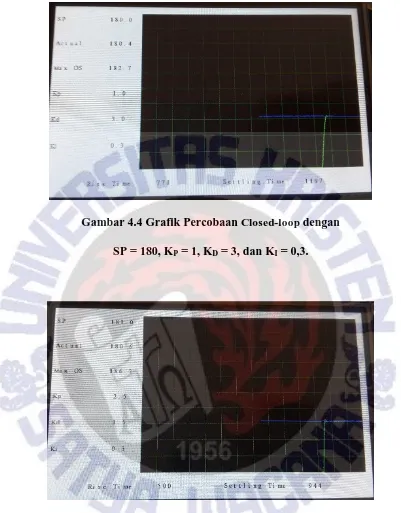
Gambar 4.4 Grafik Percobaan Closed-loop dengan
SP = 180, KP = 1, KD = 3, dan KI = 0,3.
Gambar 4.5 Grafik Percobaan Closed-loop dengan
32
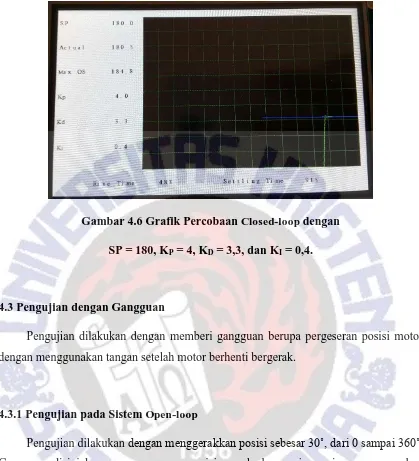
Gambar 4.6 Grafik Percobaan Closed-loop dengan
SP = 180, KP = 4, KD = 3,3, dan KI = 0,4.
4.3 Pengujian dengan Gangguan
Pengujian dilakukan dengan memberi gangguan berupa pergeseran posisi motor dengan menggunakan tangan setelah motor berhenti bergerak.
4.3.1 Pengujian pada Sistem Open-loop
33
Tabel 4.7 Hasil Pengujian Sistem Open-loop dengan Gangguan
SP Sudut Aktual Error Error tanpa gangguan Keterangan
30 31,2 1,2 1,2 +15
34
Gambar 4.8 Efek Gangguan pada SP = 60
Gambar 4.9 Efek Gangguan pada SP = 90
35 4.3.2 Pengujian pada Sistem Closed-loop
Pengujian dilakukan dengan cara menggeser posisi motor ketika sistem sudah mencapai keadaan tunak (steady-state). Sistem akan berusaha mengembalikan posisi ke posis sebelum diberi gangguan.
Gambar 4.10 Grafik Sistem Closed-loop dengan Gangguan
SP = 180, KP = 1, KI = 0,3, dan KD = 3
Gambar 4.11 Grafik Sistem Closed-loop dengan Gangguan
36
Gambar 4.11 Grafik Sistem Closed-loop dengan Gangguan
SP = 180, KP = 4, KI = 0,4, dan KD = 3,3
Sistem closed-loop dapat mengkoreksi error yang terjadi, hal ini dikarenakan sistem closed-loop memiliki umpan balik, sehingga sistem closed-loop dimungkinkan untuk melakukan koreksi error dengan umpan balik yang diterima.
Diberi gangguan
Gangguan dilepas Diberi gangguan